
Analysis of Coverage and Capacity for UAV-Aided Networks with Directional mmWave Communications †


Abstract
1. Introduction
1.1. Related Works
1.2. Contributions
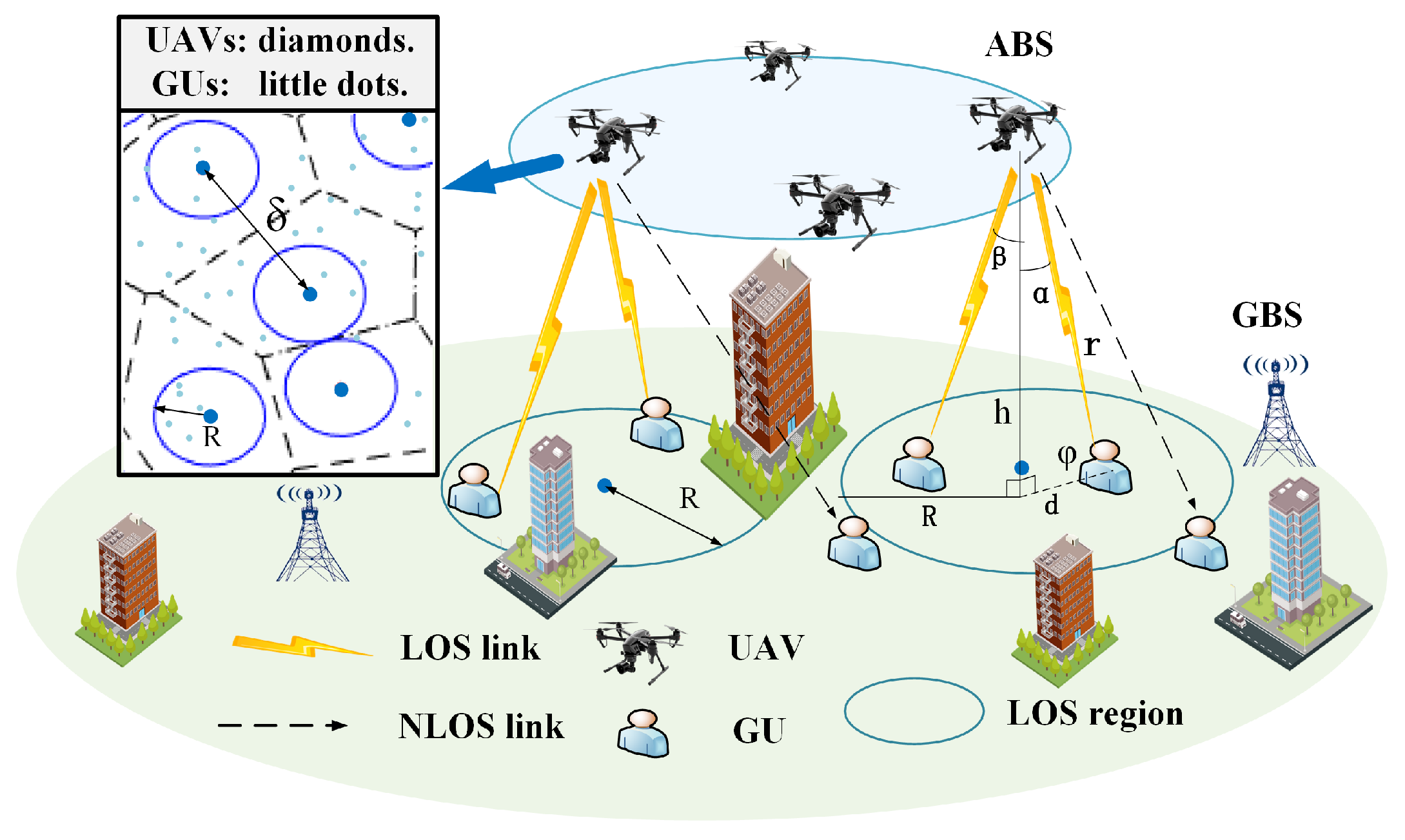
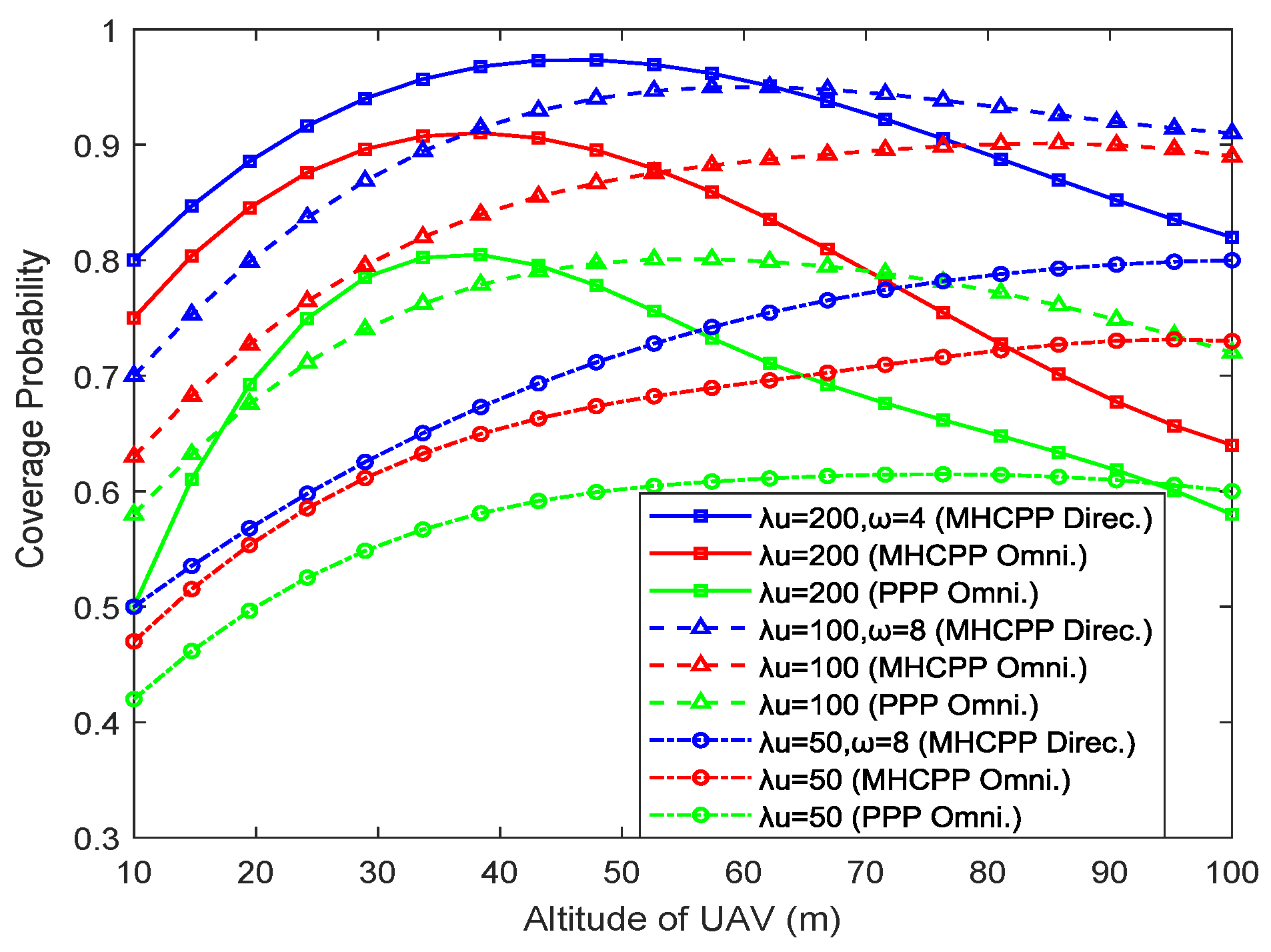
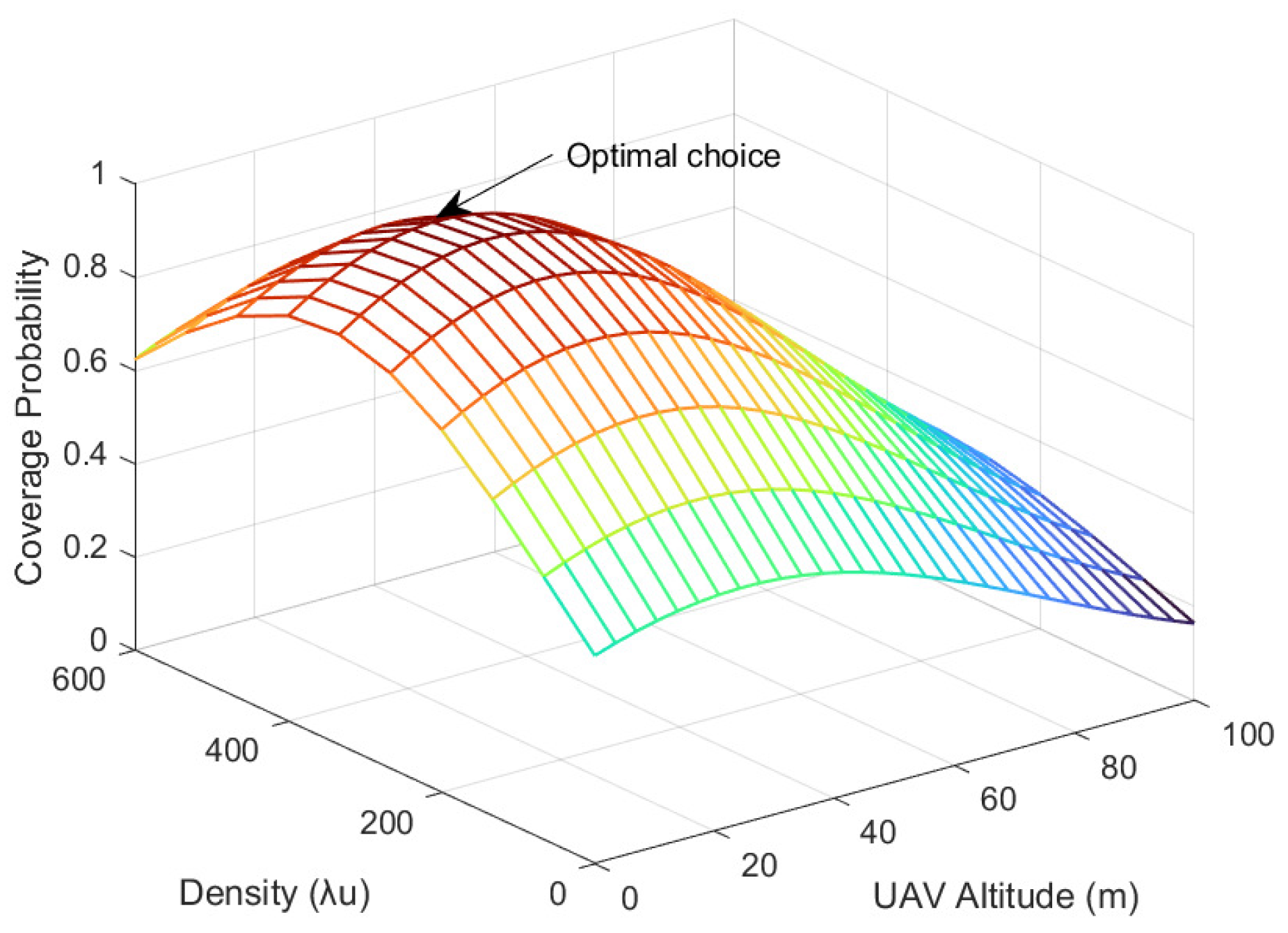
- This paper focuses on a promising networking paradigm where mmWave communications are utilized in mobile UAV-aided environments. To attempt to model the UAV-aided network via repulsive point process, UAVs are randomly deployed at a fixed altitude and modeled as MHCPP type-II to assist GBS. To approximately derive the coverage probability and network capacity expressions in mmWave UAV-aided networks, stochastic geometry is used for examination as an efficient method. Extensive numerical results are provided to validate the developed framework and how network parameter settings affect these performance metrics.
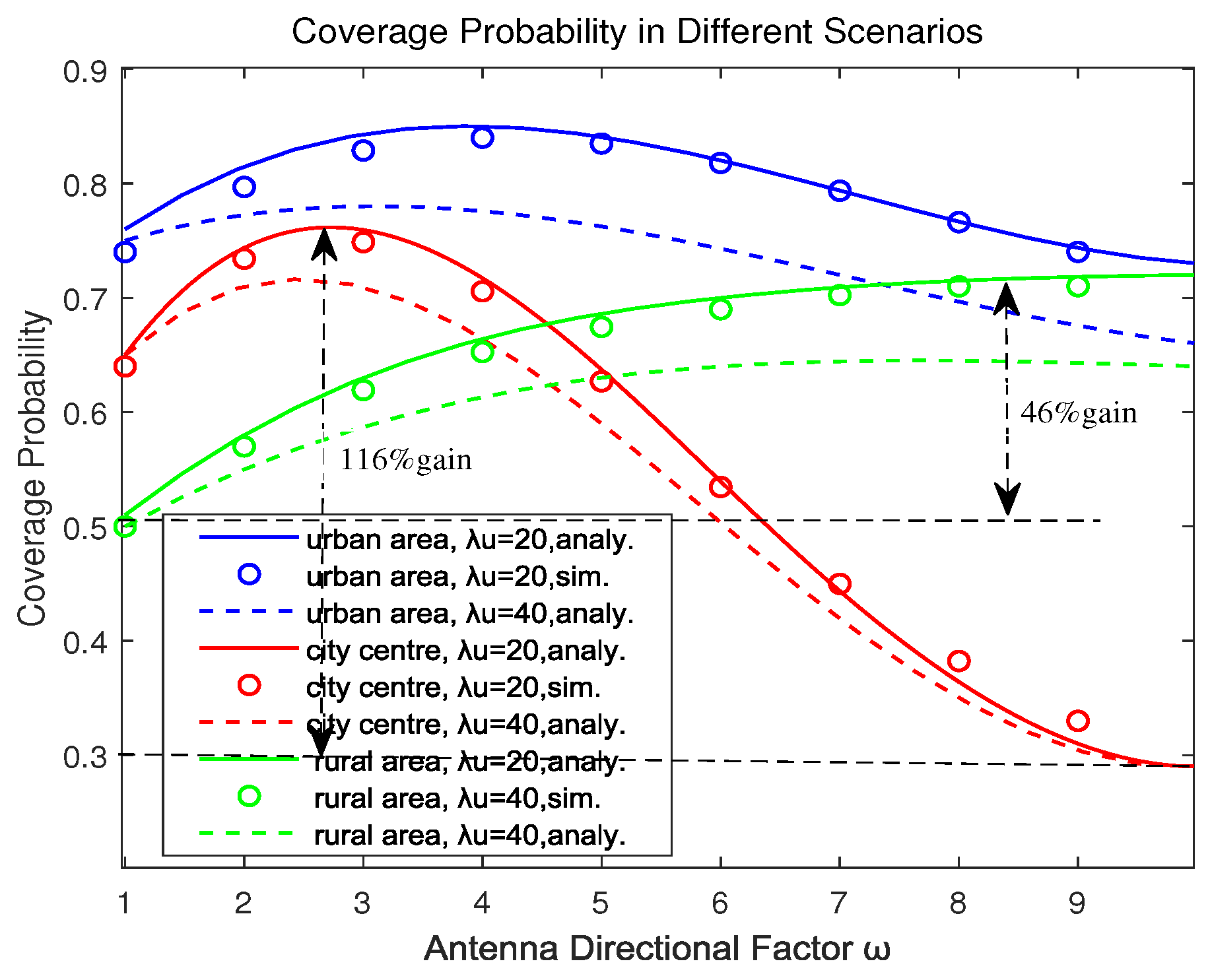
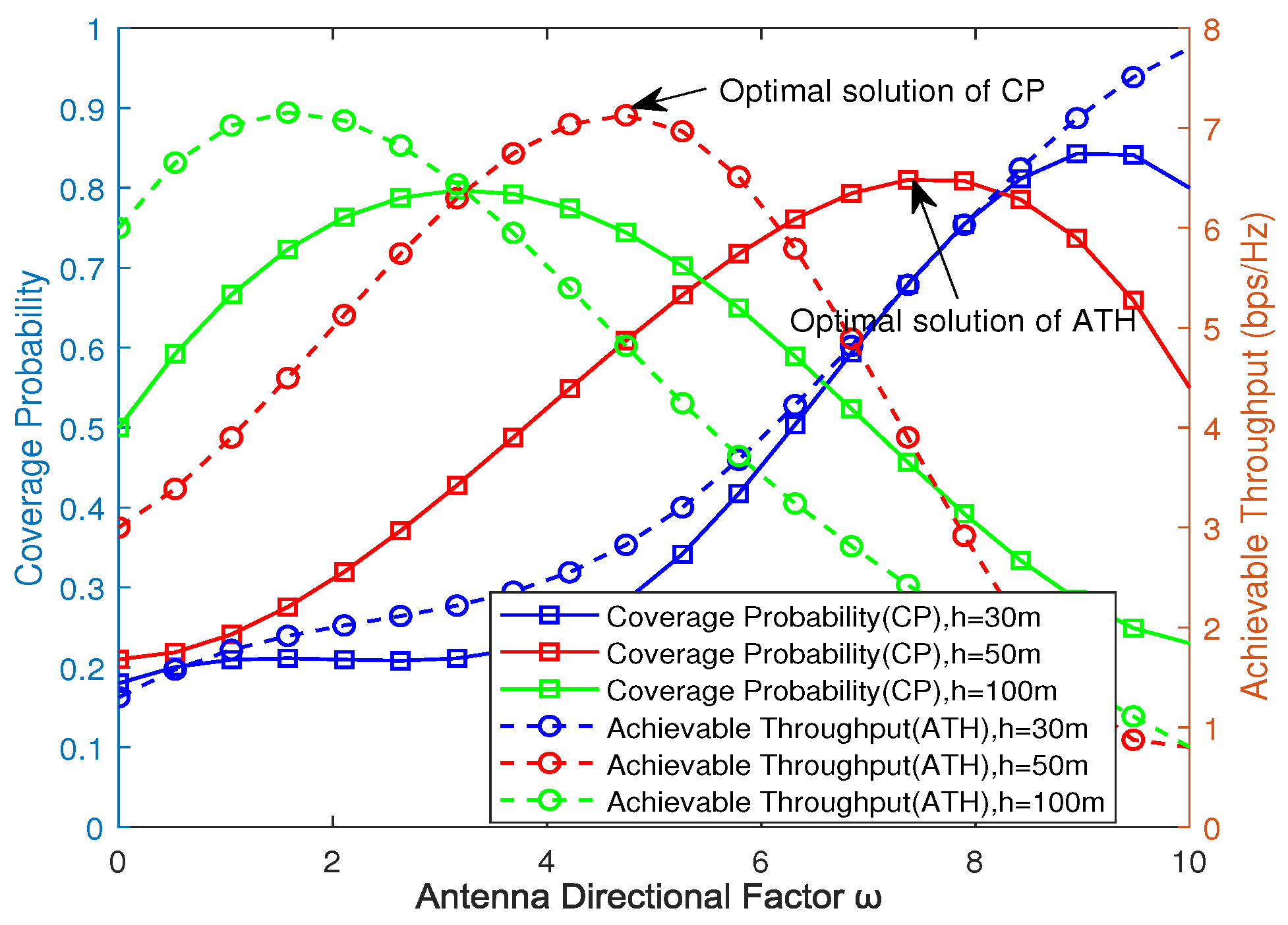
- A more realistic angle-dependent mmWave antenna array is considered to model the 3D antenna beamforming gain in mmWave links between BSs and GUs, which meets the actual dense or sparse GU distribution requirements. The experiments show that by dynamically adjusting the antenna direction factor , the coverage probability and capacity of the mmWave network can be significantly expanded. In addition, the Nakagami-m model is used to characterize the small-scale fading; by flexibly adjusting parameter m, the influence of obstacles such as urban buildings and natural terrain are more accurately simulated.
- According to the obstruction effect of mmWave, an innovative method is provided to measure the coverage probability of the mmWave mobile network. Specifically, the coverage probability is fully considering the weighted sum of both the distance between BS–GU under three channel conditions and the associative probability based on received power at the typical GU, which makes the trade-off of mmWave network performance more reasonable and accurate.
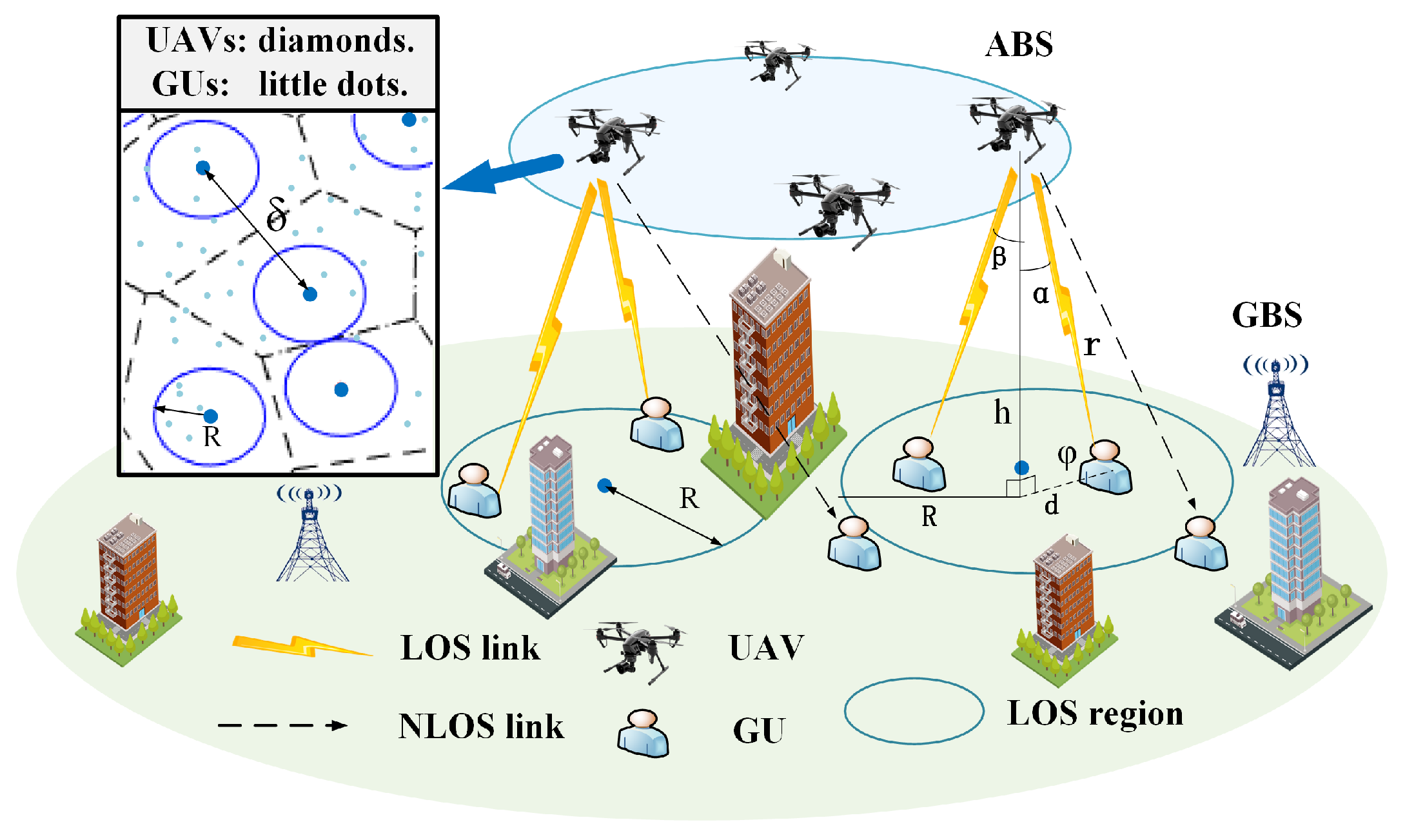
2. System Model
Interference Characteristics
3. Performance Analysis
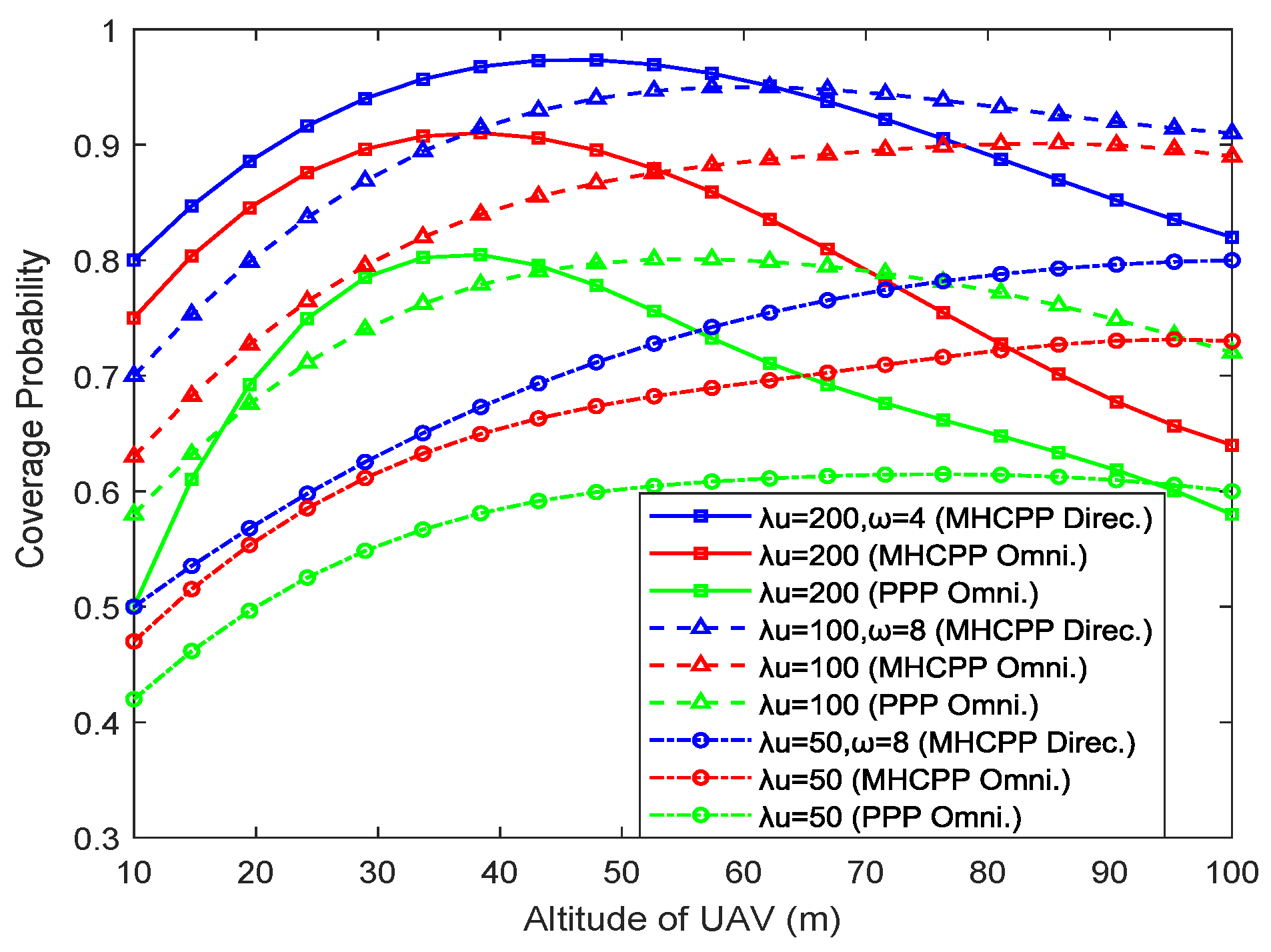
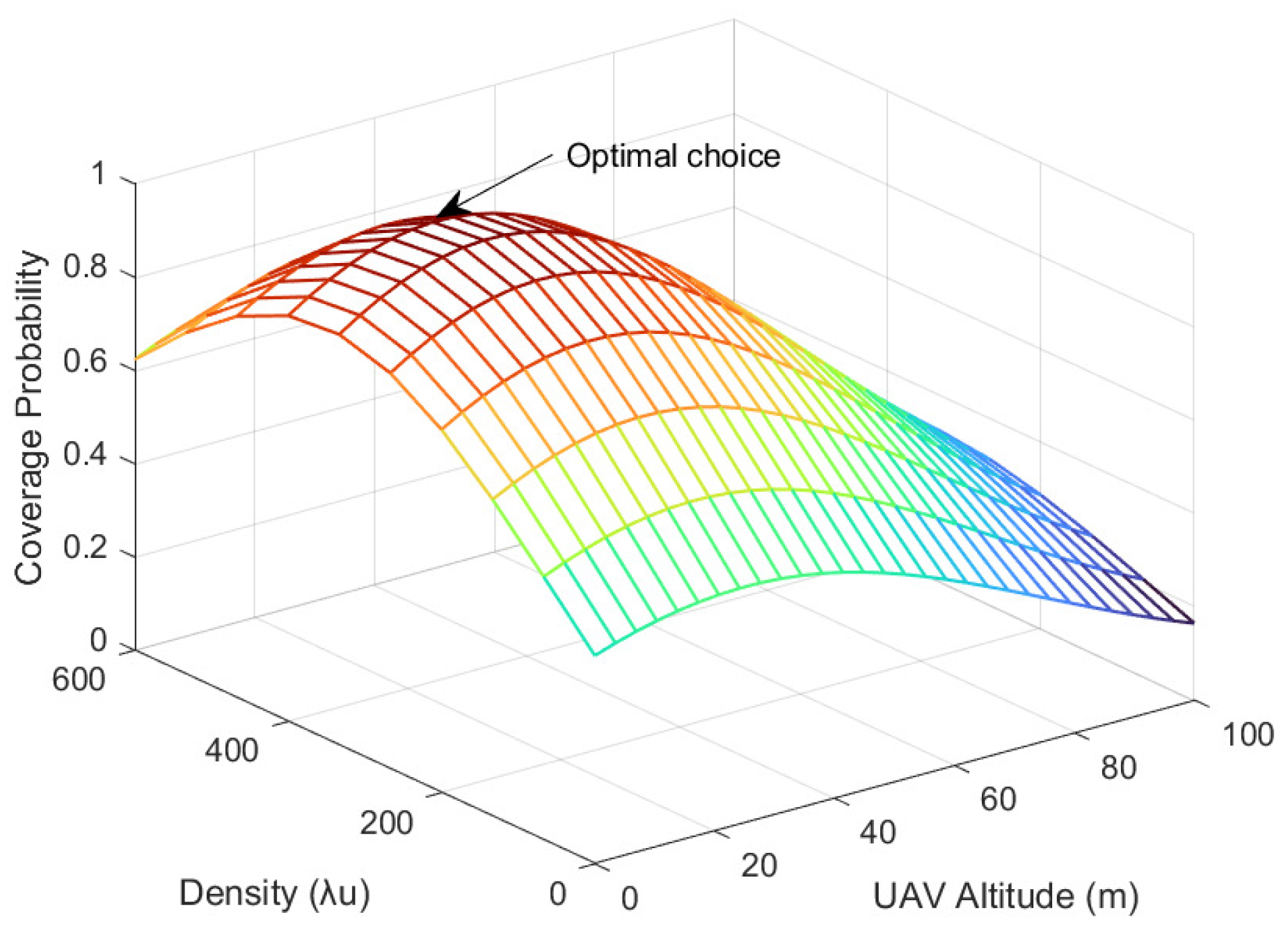
3.1. Coverage Probability
- The SIR when a typical GU is associated with a UAV can be represented as:where represents the LOS and NLOS channel, respectively, represents the distance-dependent path loss under different channel conditions, represents the directional antenna gain, and and represent the interference from the GBS, LOS UAV, and NLOS UAV, respectively.
- The SIR when the typical GU is associated with a GBS can be represented as:where is the transmit power of the GBS, represents the Rayleigh fading of the G2G channel, and is the antenna gain of the main lobe of GBS. We present of for the total interference of our network in the following paper briefly.
3.1.1. Distance-Based Coverage Probability
3.1.2. Power-Based Association Probability
3.2. Network Capacity
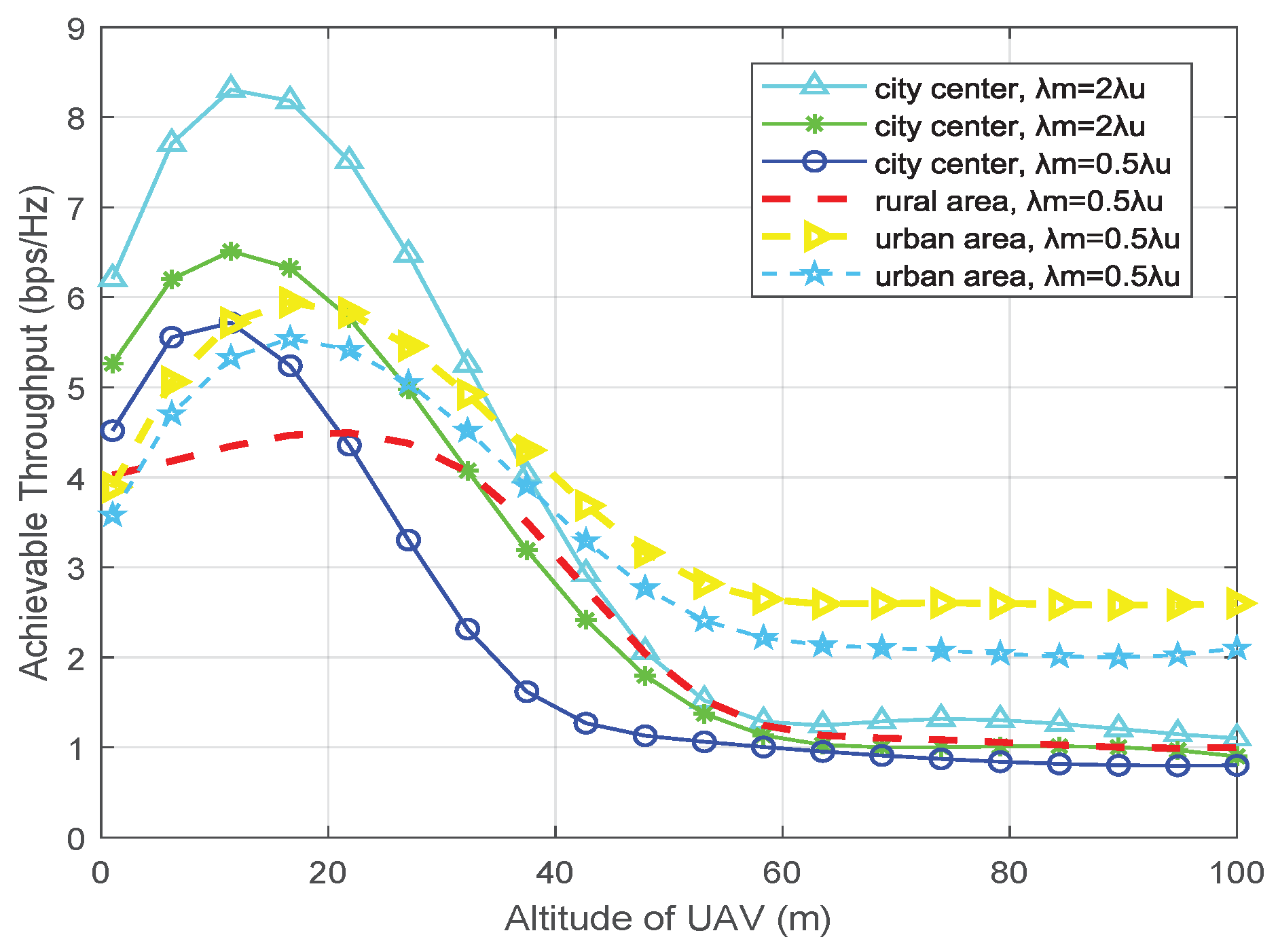
3.2.1. Achievable Throughput (ATH)
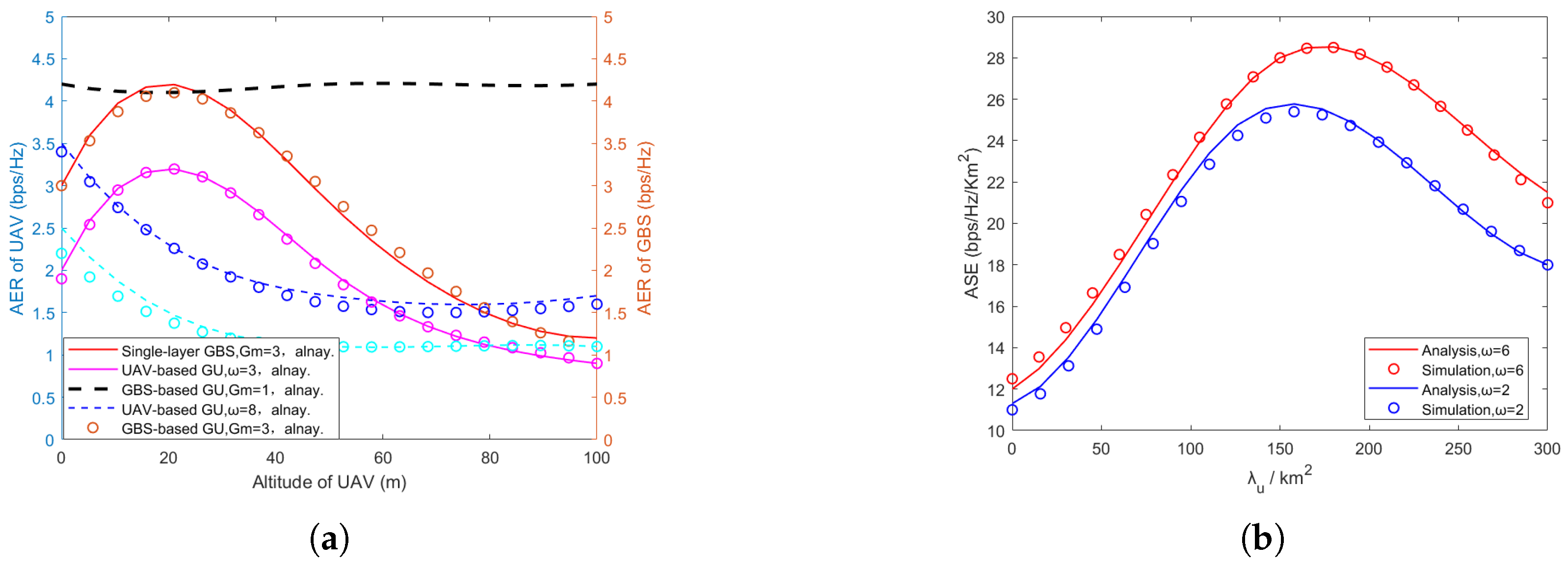
3.2.2. Average Ergodic Rate (AER)
3.2.3. Average Spectral Efficiency (ASE)
4. Simulation and Analysis
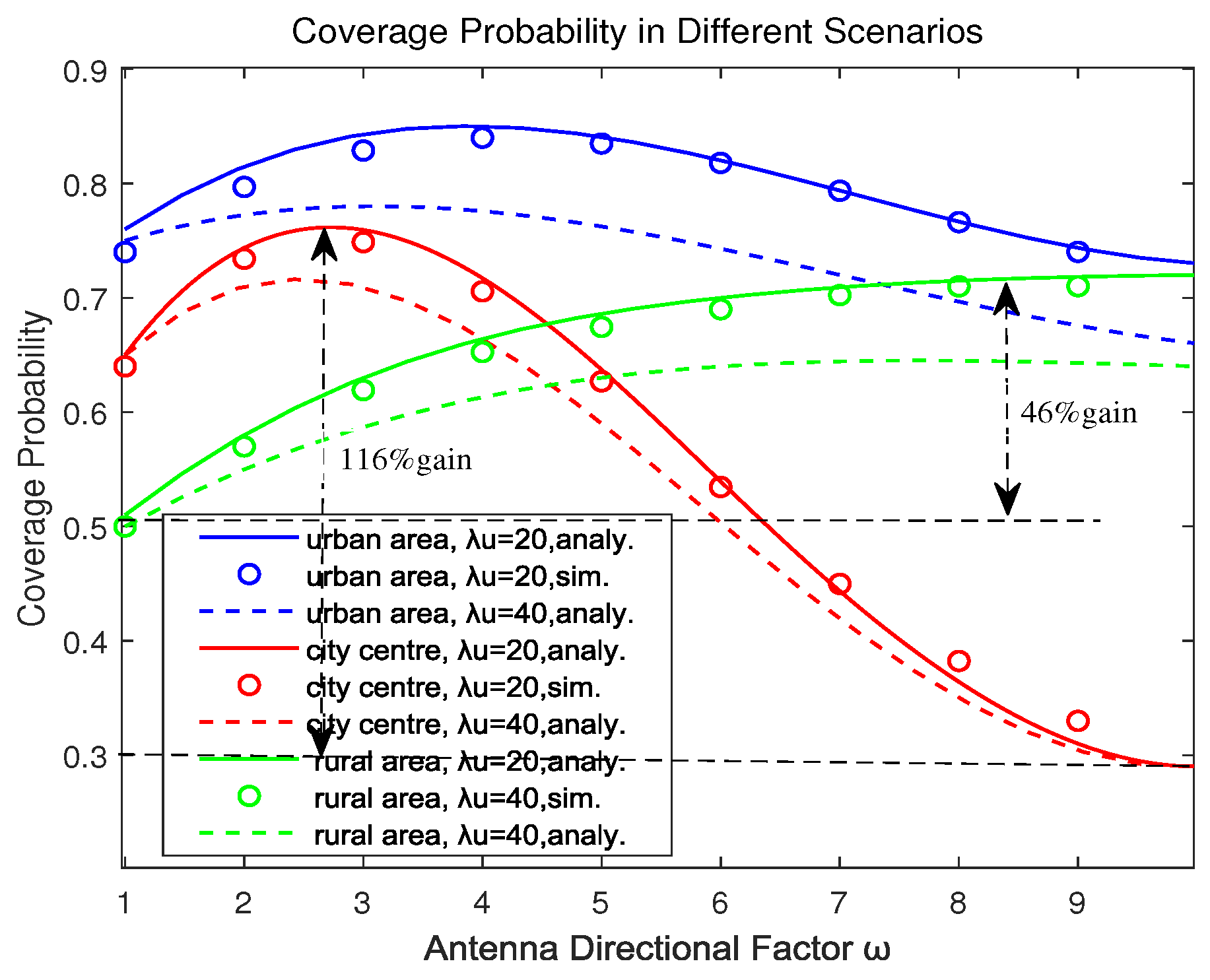
4.1. Coverage Probability
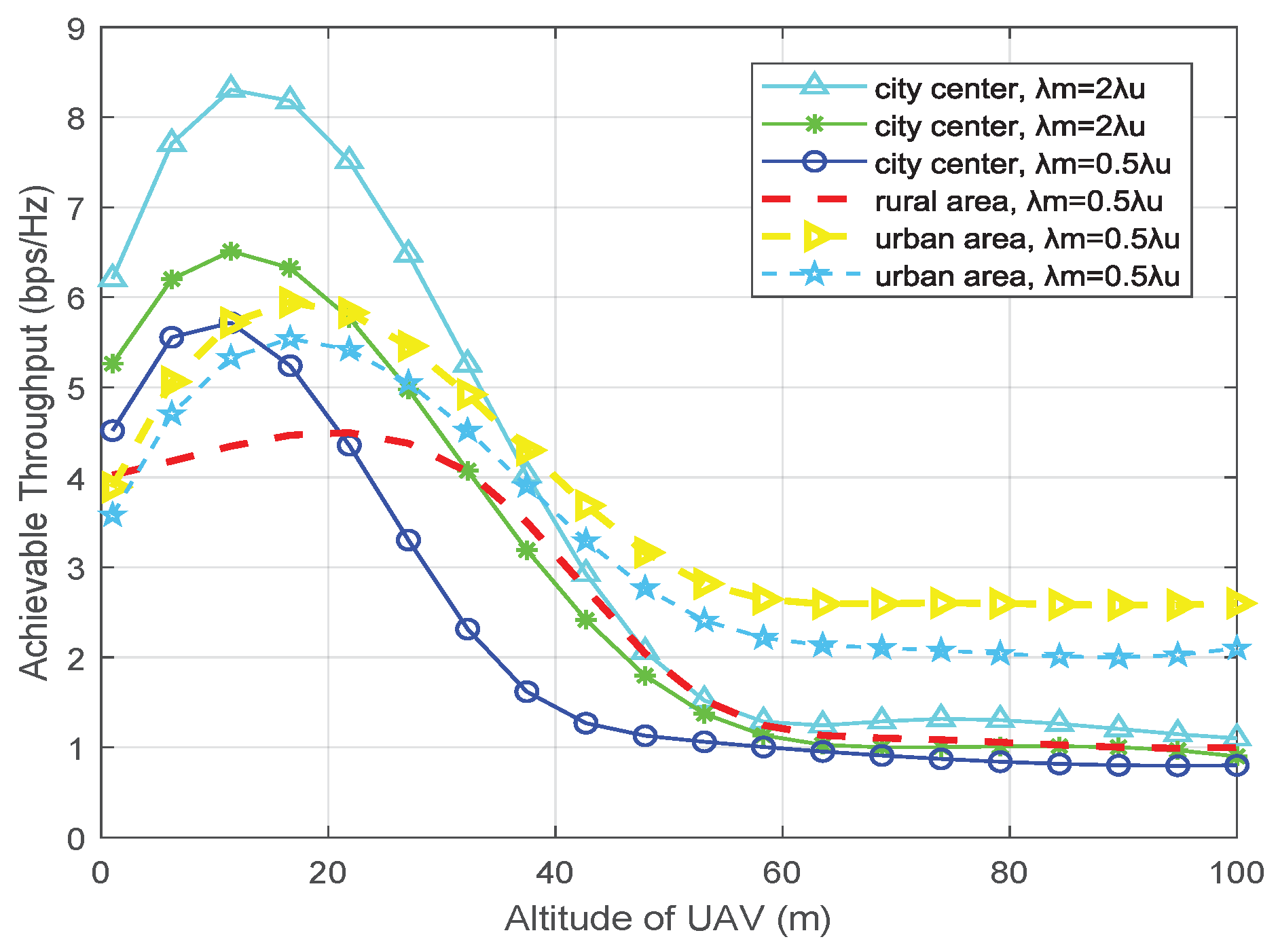
4.2. Network Capacity
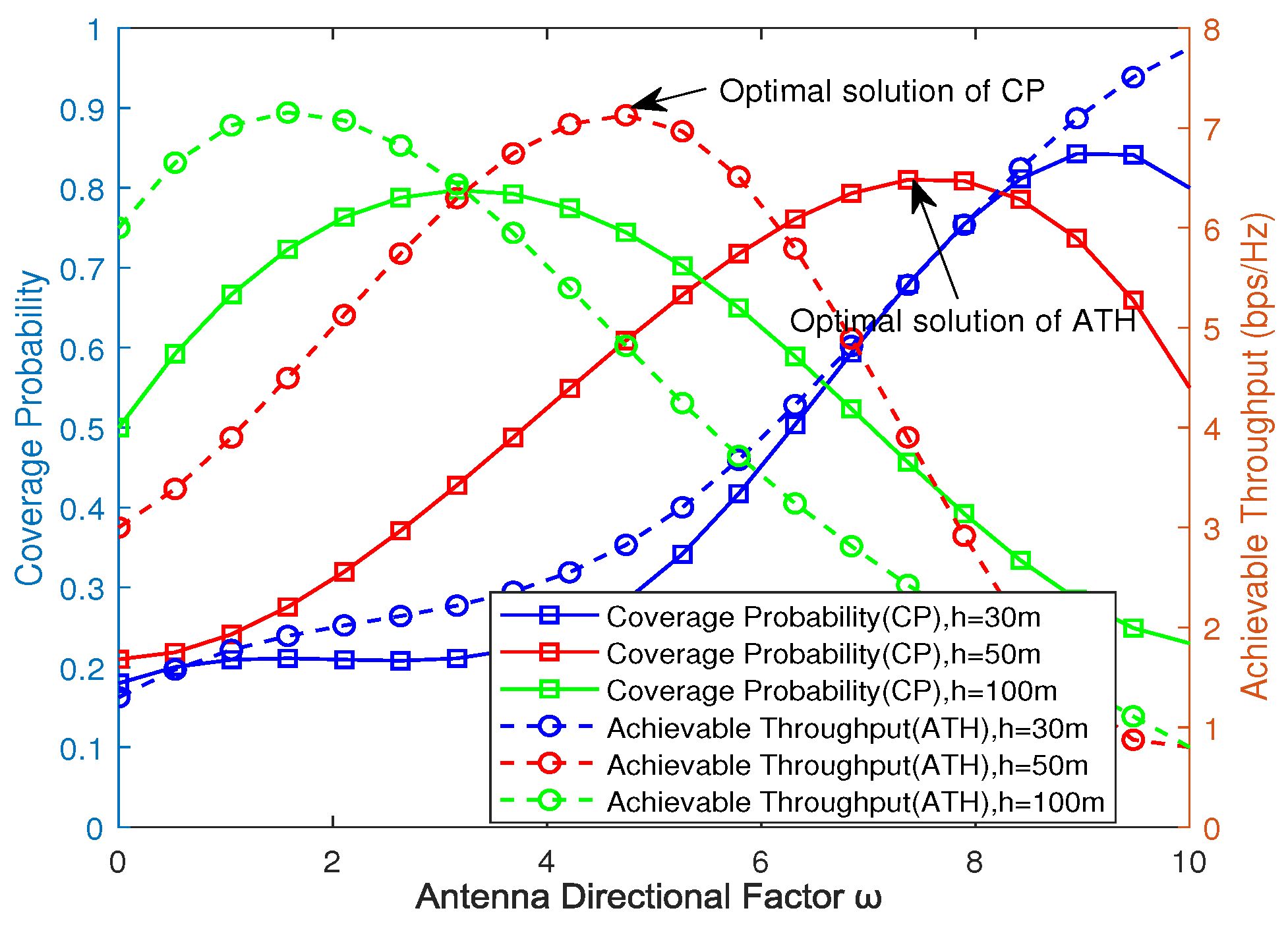
4.3. Overall Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BS | Base station |
| GU | Ground user |
| UAVs | Unmanned aerial vehicles |
| mmWave | Millimeter wave |
| MHCPP | Matérn hard-core point process |
| IoT | Internet of Things |
| PPP | Poisson point process |
| GPP | Binomial point processes |
| -GPP | -Ginibre point process |
| LOS | Line-of-sight |
| NLOS | Non-line-of-sight |
| GBSs | Ground base stations |
| ABSs | Air base stations |
| SBS | Serve base station |
| SIR | Signal-to-interference ratio |
| MISR | Mean of interference-to-signal ratio |
| CCDF | Complementary cumulative distribution function |
Appendix A. Proof of Laplace Transform of L, N, G
References
- Liu, Y.; Xiong, K.; Ni, Q.; Fan, P.; Letaief, K.B. UAV-assisted wireless powered cooperative mobile edge computing: Joint offloading, CPU control, and trajectory optimization. IEEE Internet Things J. 2019, 7, 2777–2790. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, H. UAV-assisted networks through a tunable dependent model. IEEE Commun. Lett. 2020, 24, 1110–1114. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H. UAV networks through a spatial repulsion model. IEEE Wirel. Commun. Lett. 2021, 11, 101–105. [Google Scholar] [CrossRef]
- Wang, C.; Deng, D.; Xu, L.; Wang, W. Resource scheduling based on deep reinforcement learning in UAV assisted emergency communication networks. IEEE Trans. Commun. 2022, 70, 3834–3848. [Google Scholar] [CrossRef]
- Illian, J.; Penttinen, A.; Stoyan, H.; Stoyan, D. Statistical Analysis and Modelling of Spatial Point Patterns; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Stoyan, D.; Stoyan, H. On one of Matérn’s hard-core point process models. Math. Nachrichten 1985, 122, 205–214. [Google Scholar] [CrossRef]
- Li, J.; Niu, Y.; Wu, H.; Ai, B.; Chen, S.; Feng, Z.; Zhong, Z.; Wang, N. Mobility support for millimeter wave communications: Opportunities and challenges. IEEE Commun. Surv. Tutorials 2022, 24, 1816–1842. [Google Scholar] [CrossRef]
- Wang, Z.; Hall, P.S.; Kelly, J.R.; Gardner, P. Wideband frequency-domain and space-domain pattern reconfigurable circular antenna array. IEEE Trans. Antennas Propag. 2017, 65, 5179–5189. [Google Scholar] [CrossRef]
- Lu, X.; Salehi, M.; Haenggi, M.; Hossain, E.; Jiang, H. Stochastic geometry analysis of spatial-temporal performance in wireless networks: A tutorial. IEEE Commun. Surv. Tutorials 2021, 23, 2753–2801. [Google Scholar] [CrossRef]
- Ghamari, M.; Rangel, P.; Mehrubeoglu, M.; Tewolde, G.; Sherratt, R.S. Unmanned aerial vehicle communications for civil applications: A review. IEEE Access 2022, 10, 102492–102531. [Google Scholar] [CrossRef]
- Azari, M.M.; Rosas, F.; Pollin, S. Cellular connectivity for UAVs: Network modeling, performance analysis, and design guidelines. IEEE Trans. Wirel. Commun. 2019, 18, 3366–3381. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Evans, R.J.; Kandeepan, S. Nearest neighbor distance distribution in hard-core point processes. IEEE Commun. Lett. 2016, 20, 1872–1875. [Google Scholar] [CrossRef]
- Zhang, S.; Zhu, Y.; Liu, J. Multi-UAV Enabled Aerial-Ground Integrated Networks: A Stochastic Geometry Analysis. IEEE Trans. Commun. 2022, 70, 7040–7054. [Google Scholar] [CrossRef]
- Peng, J.; Tang, W.; Zhang, H. Directional Antennas Modeling and Coverage Analysis of UAV-Assisted Networks. IEEE Wirel. Commun. Lett. 2022, 11, 2175–2179. [Google Scholar] [CrossRef]
- Wu, H.; Tao, X.; Zhang, N.; Shen, X. Cooperative UAV cluster-assisted terrestrial cellular networks for ubiquitous coverage. IEEE J. Sel. Areas Commun. 2018, 36, 2045–2058. [Google Scholar] [CrossRef]
- Wei, X.; Peng, L.; Xu, R.; Li, A.; Yu, X.; Xu, Z. Performance Optimization of UAV-Assisted Networks with mmWave Antennas. In Proceedings of the 2023 International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 2–4 November 2023; pp. 652–657. [Google Scholar]
- Ge, Y.; Zhang, W.; Gao, F.; Zhang, S.; Ma, X. Beamforming network optimization for reducing channel time variation in high-mobility massive MIMO. IEEE Trans. Commun. 2019, 67, 6781–6795. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutorials 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Debogovic, T.; Perruisseau-Carrier, J.; Bartolic, J. Partially reflective surface antenna with dynamic beamwidth control. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 1157–1160. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, C.; Yu, F.; Chen, H. Coverage analysis for UAV-assisted mmwave cellular networks using poisson hole process. IEEE Trans. Veh. Technol. 2021, 71, 3171–3186. [Google Scholar] [CrossRef]
- Susarla, P.; Gouda, B.; Deng, Y.; Juntti, M.; Silvén, O.; Tölli, A. Learning-Based Beam Alignment for Uplink mmWave UAVs. IEEE Trans. Wirel. Commun. 2022, 22, 1779–1793. [Google Scholar] [CrossRef]
- Yang, B.; Taleb, T.; Shen, Y.; Jiang, X.; Yang, W. Performance, fairness, and tradeoff in UAV swarm underlaid mmWave cellular networks with directional antennas. IEEE Trans. Wirel. Commun. 2020, 20, 2383–2397. [Google Scholar] [CrossRef]
- Sun, H.; Ma, C.; Zhang, L.; Li, J.; Wang, X.; Li, S.; Quek, T.Q. Coverage analysis for cellular-connected random 3D mobile UAVs with directional antennas. IEEE Wirel. Commun. Lett. 2023, 12, 550–554. [Google Scholar] [CrossRef]
- Chang, H.; Wang, C.X.; Liu, Y.; Huang, J.; Sun, J.; Zhang, W.; Gao, X. A novel nonstationary 6G UAV-to-ground wireless channel model with 3-D arbitrary trajectory changes. IEEE Internet Things J. 2020, 8, 9865–9877. [Google Scholar] [CrossRef]
- Wei, Z.; Zhu, J.; Guo, Z.; Ning, F. The performance analysis of spectrum sharing between UAV enabled wireless mesh networks and ground networks. IEEE Sens. J. 2020, 21, 7034–7045. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Tian, Y.; Leung, V.C. Modeling and analysis of aerial base station-assisted cellular networks in finite areas under LoS and NLoS propagation. IEEE Trans. Wirel. Commun. 2018, 17, 6985–7000. [Google Scholar] [CrossRef]
- Qin, S.; Peng, L.; Xu, R.; Wei, X.; Wei, X.; Jiang, D. Performance Analysis of Multi-Hop Flying Mesh Network Using Directional Antenna Based on β-GPP. Drones 2023, 7, 335. [Google Scholar] [CrossRef]
- Matracia, M.; Kishk, M.A.; Alouini, M.S. Coverage analysis for UAV-assisted cellular networks in rural areas. IEEE Open J. Veh. Technol. 2021, 2, 194–206. [Google Scholar] [CrossRef]
- Wang, Y.; Su, Z.; Xu, Q.; Li, R.; Luan, T.H.; Wang, P. A secure and intelligent data sharing scheme for UAV-assisted disaster rescue. IEEE/ACM Trans. Netw. 2023, 31, 2422–2438. [Google Scholar] [CrossRef]
- Ren, H.; Pan, C.; Wang, K.; Deng, Y.; Elkashlan, M.; Nallanathan, A. Achievable data rate for URLLC-enabled UAV systems with 3-D channel model. IEEE Wirel. Commun. Lett. 2019, 8, 1587–1590. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, W.; Wang, W.; Yang, L.; Zhang, W. Research challenges and opportunities of UAV millimeter-wave communications. IEEE Wirel. Commun. 2019, 26, 58–62. [Google Scholar] [CrossRef]
- Yang, J.; Pan, Z.; Guo, L. Coverage and energy efficiency analysis for two-tier heterogeneous cellular networks based on matérn hard-core process. Future Internet 2019, 12, 1. [Google Scholar] [CrossRef]
- Haenggi, M. The mean interference-to-signal ratio and its key role in cellular and amorphous networks. IEEE Wirel. Commun. Lett. 2014, 3, 597–600. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Xu, M. The coverage problem in UAV network: A survey. In Proceedings of the Fifth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Hefei, China, 11–13 July 2014; pp. 1–5. [Google Scholar]
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 2898–2904. [Google Scholar]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Mao, K.; Zhu, Q.; Qiu, Y.; Liu, X.; Song, M.; Fan, W.; Kokkeler, A.B.; Miao, Y. A uav-aided real-time channel sounder for highly dynamic non-stationary A2G scenarios. IEEE Trans. Instrum. Meas. 2023, 72, 6504515. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhang, S. Modeling and Analysis of Multi-UAV Networks Using Matérn Hard-Core Point Process. In Proceedings of the 2022 IEEE 23rd International Conference on High Performance Switching and Routing (HPSR), Taicang, China, 6–8 June 2022; pp. 89–94. [Google Scholar]
- Chen, Y.; Yang, J.; Cao, X.; Zhang, S. Energy efficiency optimization for heterogeneous cellular networks modeled by Matérn hard-core point process. China Commun. 2020, 17, 70–80. [Google Scholar] [CrossRef]
- Chen, C.; Elliott, R.C.; Krzymień, W.A. Empirical distribution of nearest-transmitter distance in wireless networks modeled by Matérn hard core point processes. IEEE Trans. Veh. Technol. 2017, 67, 1740–1749. [Google Scholar] [CrossRef]
- Haenggi, M.; Ganti, R.K. Interference in large wireless networks. Found. Trends® Netw. 2009, 3, 127–248. [Google Scholar] [CrossRef]
- ElSawy, H.; Hossain, E.; Haenggi, M. Stochastic geometry for modeling, analysis, and design of multi-tier and cognitive cellular wireless networks: A survey. IEEE Commun. Surv. Tutorials 2013, 15, 996–1019. [Google Scholar] [CrossRef]
- Haenggi, M. Mean interference in hard-core wireless networks. IEEE Commun. Lett. 2011, 15, 792–794. [Google Scholar] [CrossRef]
- Sun, H.; Wang, X.; Zhang, Y.; Quek, T.Q. Performance analysis and cell association design for drone-assisted heterogeneous networks. IEEE Trans. Veh. Technol. 2020, 69, 13741–13755. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Node Distribution | Small-Scale Fading Model | Antenna Model | Power-Based Association Probability | Performance Metrics |
|---|---|---|---|---|---|---|
| [26] | 2018 | HPPP | Nakagami-m | - | - | CP/ASE |
| [32] | 2019 | MHCPP | Rayleigh | - | - | CP/Energy efficiency |
| [33] | 2020 | MHCPP | Rayleigh | - | - | CP/ATH/Energy efficiency |
| [28] | 2021 | PPP | Nakagami-m | - | √ | CP/Association probability |
| [13] | 2022 | MHCPP | Nakagami-m | - | - | CP/Average rate |
| [20] | 2022 | Poisson hole process | Nakagami-m | mmWave antenna | - | CP/Distance-based association probability |
| [34] | 2022 | MHCPP | Rayleigh | - | - | CP/Average rate |
| [23] | 2023 | HPPP | Nakagami-m | Conical antenna | - | CP/Handover probability |
| [27] | 2023 | -GPP | - | Conical antenna | - | CP/Ergodic capacity |
| Our Paper | 2024 | MHCPP | Nakagami-m | mmWave antenna | √ | CP/ATH/ASE/AER |
| Parameter | Description | Value |
|---|---|---|
| , | Transmission power of BSs | (23, 40) dBm |
| h | Flight altitude of ABSs | (30, 40, 50, 100) m |
| , | Density of BSs | (20, 200)/km2 |
| m, | Paramenters of Nakagami-m fading model | (1, 1.5) |
| ,, | Path loss exponent | (2.5, 3.5, 2.5) |
| ,,T | Additional path loss | (1, 10, 1) dB |
| a,b | Environmental-related parameters | (10.12, 0.16) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, X.; Peng, L.; Xu, R.; Li, A.; Yu, X.; Wang, H. Analysis of Coverage and Capacity for UAV-Aided Networks with Directional mmWave Communications. Drones 2024, 8, 152. https://doi.org/10.3390/drones8040152
Wei X, Peng L, Xu R, Li A, Yu X, Wang H. Analysis of Coverage and Capacity for UAV-Aided Networks with Directional mmWave Communications. Drones. 2024; 8(4):152. https://doi.org/10.3390/drones8040152
Chicago/Turabian StyleWei, Xingchen, Laixian Peng, Renhui Xu, Aijing Li, Xingyue Yu, and Hai Wang. 2024. "Analysis of Coverage and Capacity for UAV-Aided Networks with Directional mmWave Communications" Drones 8, no. 4: 152. https://doi.org/10.3390/drones8040152
APA StyleWei, X., Peng, L., Xu, R., Li, A., Yu, X., & Wang, H. (2024). Analysis of Coverage and Capacity for UAV-Aided Networks with Directional mmWave Communications. Drones, 8(4), 152. https://doi.org/10.3390/drones8040152