


Artificial Intelligence Applied to Drone Control: A State of the Art

 ,
,  , and
, and
Abstract
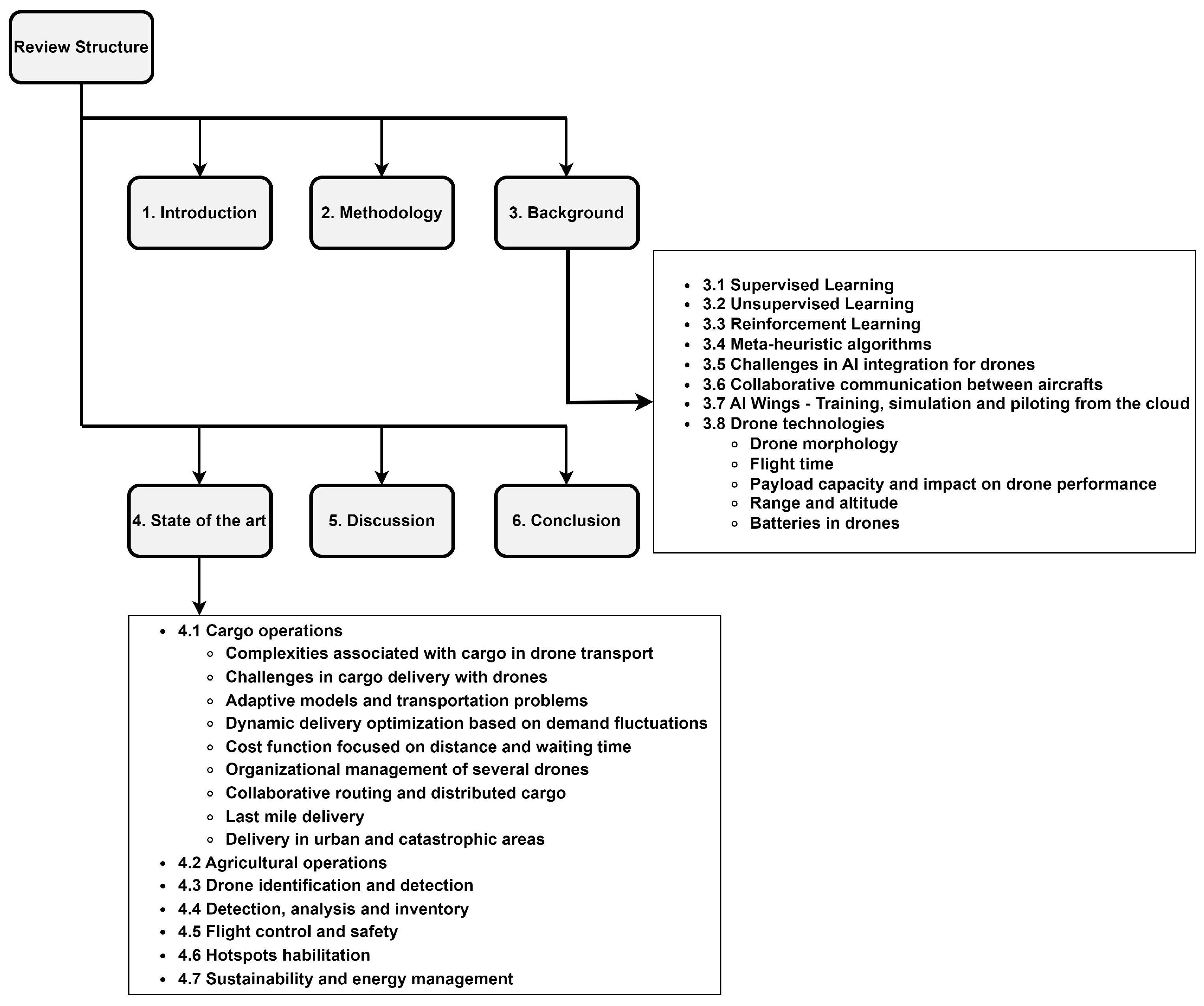
:1. Introduction
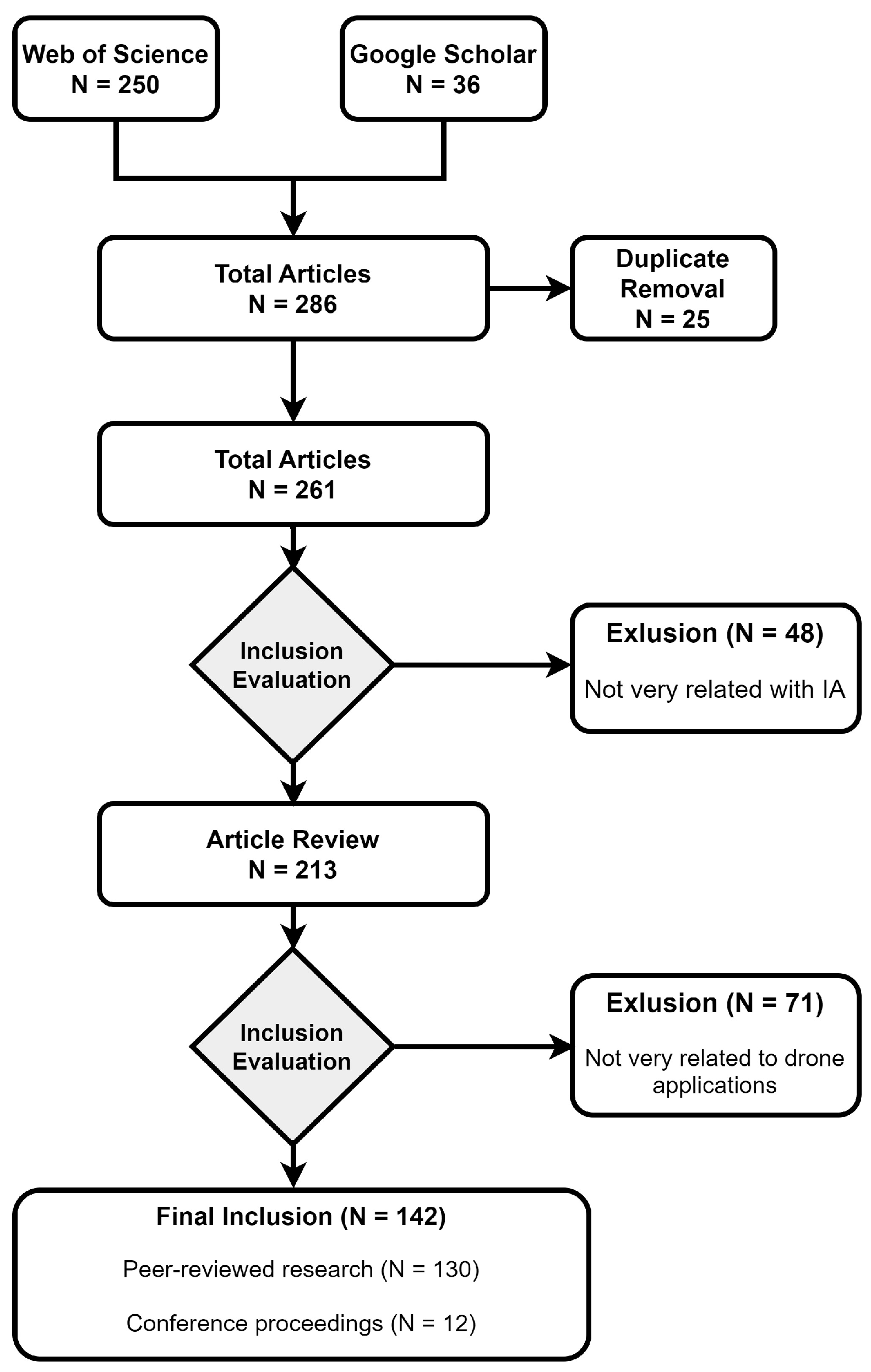
2. Methodology
3. Background
3.1. Supervised Learning
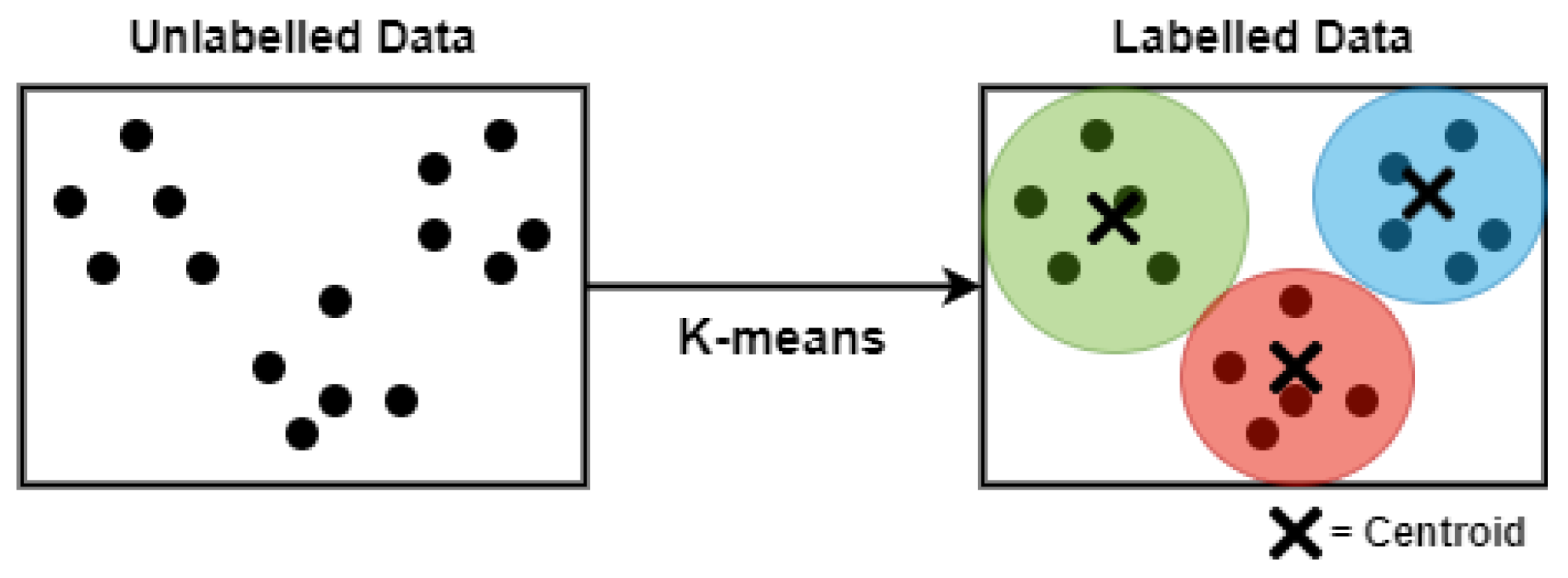
3.2. Unsupervised Learning
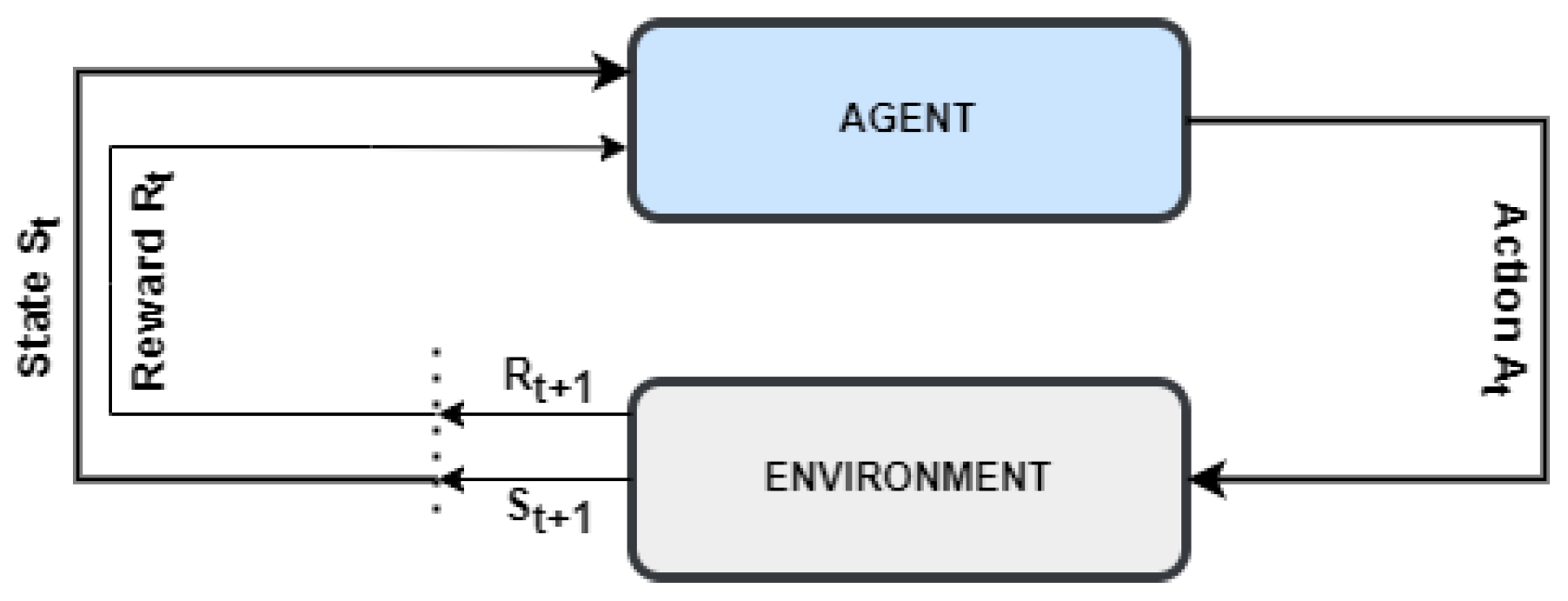
3.3. Reinforcement Learning
3.4. Meta-Heuristic Algorithms
3.5. Challenges in AI Integration for Drones
3.6. Collaborative Communication between Aircrafts
3.7. AI Wings—Training, Simulation, and Piloting from the Cloud
3.8. Drone Technologies
3.8.1. Drone Morphology
3.8.2. Flight Time
3.8.3. Payload Capacity and Impact on Drone Performance
3.8.4. Range and Altitude
- High-Altitude Platforms (HAPs): HAPs, like balloons, are also used for mobile connectivity. These High-Altitude Platforms provide more extensive coverage compared to LAPs. However, they are complex to deploy and are generally used as a means to support internet connectivity.
- Low-Altitude Platforms (LAPs): LAPs are frequently deployed to support mobile communication due to their fast deployment and low cost. In addition, these platforms provide line of sight (LoS) routing, which significantly improves communication performance [33]. Table 4 presents drone categories based on altitude.
3.8.5. Batteries in Drones
4. State of the Art
4.1. Cargo Operations
4.1.1. Complexities Associated with Cargo in Drone Transport
4.1.2. Challenges in Cargo Delivery with Drones
4.1.3. Adaptive Models and Transportation Problems
4.1.4. Dynamic Delivery Optimization Based on Demand Fluctuations
4.1.5. Cost Function Focused on Distance and Waiting Time
4.1.6. Organizational Management of Several Drones
4.1.7. Collaborative Routing and Distributed Cargo
4.1.8. Last Mile Delivery
4.1.9. Delivery in Urban and Catastrophic Areas
4.2. Agricultural Operations
4.3. Drone Identification and Detection
4.4. Detection, Analysis and Inventory
4.5. Flight Control and Safety
4.6. Hotspots Habilitation
4.7. Sustainability and Energy Management
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Borghetti, F.; Caballini, C.; Carboni, A.; Grossato, G.; Maja, R.; Barabino, B. The Use of Drones for Last-Mile Delivery: A Numerical Case Study in Milan, Italy. Sustainability 2022, 14, 1766. [Google Scholar] [CrossRef]
- Bruni, M.E.; Khodaparasti, S.; Moshref-Javadi, M. A logic-based Benders decomposition method for the multi-trip traveling repairman problem with drones. Comput. Oper. Res. 2022, 145, 105845. [Google Scholar] [CrossRef]
- Raivi, A.M.; Huda, S.M.A.; Alam, M.M.; Moh, S. Drone Routing for Drone-Based Delivery Systems: A Review of Trajectory Planning, Charging, and Security. Sensors 2023, 23, 1463. [Google Scholar] [CrossRef] [PubMed]
- Tolba, M.; Shirinzadeh, B.; El-Bayoumi, G.; Mohamady, O. Adaptive optimal controller design for an unbalanced UAV with slung load. Auton. Robot. 2023, 47, 267–280. [Google Scholar] [CrossRef]
- Chen, X.; Ulmer, M.W.; Thomas, B.W. Deep Q-learning for same-day delivery with vehicles and drones. Eur. J. Oper. Res. 2022, 298, 939–952. [Google Scholar] [CrossRef]
- Wang, C.; Lan, H.; Saldanha-da Gama, F.; Chen, Y. On Optimizing a Multi-Mode Last-Mile Parcel Delivery System with Vans, Truck and Drone. Electronics 2021, 10, 2510. [Google Scholar] [CrossRef]
- Westheider, J.; Rueckin, J.; Popovic, M. Multi-UAV Adaptive Path Planning Using Deep Reinforcement Learning. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 649–656. [Google Scholar]
- Dabbiru, L.; Goodin, C.; Carruth, D.; Boone, J. Object detection in synthetic aerial imagery using Deep Learning. Proc. SPIE 2023, 12540, 1254002. [Google Scholar]
- An, Y.K.; Jin, H.; Jang, K.Y. Deep Learning-based Crack Evaluation of Bridges using Drone and Climbing Robot. J. Korean Soc. Nondestruct. Test. 2021, 41, 349–357. [Google Scholar] [CrossRef]
- Hiraguri, T.; Shimizu, H.; Kimura, T.; Matsuda, T.; Maruta, K.; Takemura, Y.; Ohya, T.; Takanashi, T. Autonomous Drone-Based Pollination System Using AI Classifier to Replace Bees for Greenhouse Tomato Cultivation. IEEE Access 2023, 11, 99352–99364. [Google Scholar] [CrossRef]
- Murad, N.Y.; Mahmood, T.; Forkan, A.R.M.; Morshed, A.; Jayaraman, P.P.; Siddiqui, M.S. Weed Detection Using Deep Learning: A Systematic Literature Review. Sensors 2023, 23, 3670. [Google Scholar] [CrossRef] [PubMed]
- Naranjo, M.; Fuentes, D.; Muelas, E.; Diez, E.; Ciruelo, L.; Alonso, C.; Abenza, E.; Gomez-Espinosa, R.; Luengo, I. Object Detection-Based System for Traffic Signs on Drone-Captured Images. Drones 2023, 7, 112. [Google Scholar] [CrossRef]
- Lopatin, E.; Poikonen, P. Cost-Effective Aerial Inventory of Spruce Seedlings Using Consumer Drones and Deep Learning Techniques with Two-Stage UAV Flight Patterns. Forests 2023, 14, 973. [Google Scholar] [CrossRef]
- Nieto, D.M.C.; Quiroz, E.A.P.; Lengua, M.A.C. A systematic literature review on SVM applied to regression. In Proceedings of the 2021 IEEE Sciences and Humanities International Research Conference (SHIRCON), Lima, Peru, 17–19 November 2021; pp. 1–4. [Google Scholar]
- Zhang, Z. Introduction to Machine Learning: K-Nearest Neighbors. Ann. Transl. Med. 2016, 4, 218. [Google Scholar] [CrossRef] [PubMed]
- Hatwell, J.; Gaber, M.M.; Azad, R.M.A. CHIRPS: Explaining Random Forest classification. Artif. Intell. Rev. 2020, 53, 5747–5788. [Google Scholar] [CrossRef]
- Ahmed, M.; Seraj, R.; Islam, S.M.S. The K-Means algorithm: A comprehensive survey and performance evaluation. Electronics 2020, 9, 1295. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Y. Collaborative vehicle-drone distribution network optimization for perishable products in the epidemic situation. Comput. Oper. Res. 2023, 149, 106039. [Google Scholar] [CrossRef]
- Alam, M.M.; Moh, S. Q-learning-based routing inspired by adaptive flocking control for collaborative Unmanned Aerial Vehicle Swarms. Veh. Commun. 2023, 40, 100572. [Google Scholar] [CrossRef]
- Bi, Z.; Guo, X.; Wang, J.; Qin, S.; Liu, G. Truck-Drone Delivery Optimization Based on Multi-Agent Reinforcement Learning. Drones 2024, 8, 27. [Google Scholar] [CrossRef]
- Zhang, S.; Pu, J.; Si, Y.; Sun, L. Survey on Application of Ant Colony Algorithm in Path Planning of Mobile Robot. Comput. Eng. Appl. 2020, 56, 10–19. [Google Scholar]
- Man, K.F.; Tang, K.S.; Kwong, S. Genetic algorithms: Concepts and applications [in engineering design]. IEEE Trans. Ind. Electron. 1996, 43, 519–534. [Google Scholar] [CrossRef]
- Henderson, D.; Jacobson, S.H.; Johnson, A.W. The theory and practice of simulated annealing. In Handbook of Metaheuristics; Springer: Boston, MA, USA, 2003; pp. 287–319. [Google Scholar]
- Gendreau, M. An introduction to tabu search. In Handbook of Metaheuristics; Springer: Boston, MA, USA, 2003; pp. 37–54. [Google Scholar]
- Wang, D.; Tan, D.; Liu, L. Particle Swarm Optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Weng, Y.Y.; Wu, R.Y.; Zheng, Y.J. Cooperative Truck-Drone Delivery Path Optimization under Urban Traffic Restriction. Drones 2023, 7, 59. [Google Scholar] [CrossRef]
- Shah, A.F.M.S.; Karabulut, M.A. Optimization of drones communication by using Meta-Heuristic optimization algorithms. Sigma J. Eng. Nat. Sci. 2022, 40, 108–117. [Google Scholar] [CrossRef]
- Lai, K.T.; Chung, Y.T.; Su, J.J.; Lai, C.H.; Huang, Y.H. AI Wings: An AIoT Drone System for Commanding ArduPilot UAVs. IEEE Syst. J. 2023, 17, 2213–2224. [Google Scholar] [CrossRef]
- Different Types of Drones. Available online: https://dronepedia.xyz/5-different-types-of-drones/ (accessed on 16 June 2024).
- Tahir, A.; Boling, J.; Haghbayan, M.H.; Toivonen, H.T.; Plosila, J. Swarms of Unmanned Aerial Vehicles—A Survey. J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Fotouhi, A.; Ding, M.; Hassan, M. Understanding Autonomous Drone Maneuverability for Internet of Things Applications. In Proceedings of the 2017 IEEE 18th International Symposium on a World of Wireless, Mobile and Multimedia Networks (Wowmom), Macau, China, 12–15 June 2017. [Google Scholar]
- Al-Hourani, A.; Gomez, K. Modeling Cellular-to-UAV Path-Loss for Suburban Environments. IEEE Wirel. Commun. Lett. 2018, 7, 82–85. [Google Scholar] [CrossRef]
- Ding, M.; Wang, P.; Lopez-Perez, D.; Mao, G.; Lin, Z. Performance Impact of LoS and NLoS Transmissions in Dense Cellular Networks. IEEE Trans. Wirel. Commun. 2016, 15, 2365–2380. [Google Scholar] [CrossRef]
- Hempe, D. Unmanned aircraft systems in the United States. In Proceedings of the US/Europe International Safety Conference, Washington, DC, USA, 6–8 June 2006. [Google Scholar]
- Lee, B.; Kwon, S.; Park, P.; Kim, K. Active Power Management System for an Unmanned Aerial Vehicle Powered by Solar Cells, a Fuel Cell, and Batteries. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3167–3177. [Google Scholar] [CrossRef]
- Lu, M.; Bagheri, M.; James, A.P.; Phung, T. Wireless Charging Techniques for UAVs: A Review, Reconceptualization, and Extension. IEEE Access 2018, 6, 29865–29884. [Google Scholar] [CrossRef]
- Jawad, A.M.; Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Abdullah, N.F.; Abu-Alshaeer, M.J. Wireless Power Transfer With Magnetic Resonator Coupling and Sleep/Active Strategy for a Drone Charging Station in Smart Agriculture. IEEE Access 2019, 7, 139839–139851. [Google Scholar] [CrossRef]
- Oakey, A.; Grote, M.; Smith, A.; Cherrett, T.; Pilko, A.; Dickinson, J.; AitBihiOuali, L. Integrating drones into NHS patient diagnostic logistics systems: Flight or fantasy? PLoS ONE 2022, 17, e0264669. [Google Scholar] [CrossRef] [PubMed]
- Saponi, M.; Borboni, A.; Adamini, R.; Faglia, R.; Amici, C. Embedded Payload Solutions in UAVs for Medium and Small Package Delivery. Machines 2022, 10, 737. [Google Scholar] [CrossRef]
- Lieret, M.; Kogan, V.; Doell, S.; Franke, J. Automated in-house transportation of small load carriers with Autonomous Unmanned Aerial Vehicles. In Proceedings of the 2019 IEEE 15th International Conference on Automation Science and Engineering (Case), Vancouver, BC, Canada, 22–26 August 2019; pp. 1010–1015. [Google Scholar]
- Guo, P.; Xu, W.; Zhu, Y.; Chen, Y.; Zhang, S.; Wei, C. Multi-UAV Collaborative Path Planning Based on Improved Genetic Algorithm. In International Conference on Autonomous Unmanned Systems (ICAUS 2021); Lecture Notes in Electrical Engineering; Springer: Singapore, 2022; Volume 861, pp. 2648–2657. [Google Scholar]
- Jiang, Z.; Chen, Y.; Song, G.; Yang, B.; Jiang, X. Cooperative planning of multi-UAV logistics delivery by multi-graph Reinforcement Learning. Proc. SPIE 2023, 126090, 129–137. [Google Scholar]
- Jo, H.; Lee, H.; Jeon, S.; Kaliappan, V.K.; Nguyen, T.A.; Min, D.; Lee, J.-W. Multi-agent Reinforcement Learning-Based UAS Control for Logistics Environments. In Asia-Pacific International Symposium on Aerospace Technology (APISAT 2021), Volume 2; Springer: Singapore, 2023; Volume 913, pp. 963–972. [Google Scholar]
- Xiong, T.; Liu, F.; Liu, H.; Ge, J.; Li, H.; Ding, K.; Li, Q. Multi-Drone Optimal Mission Assignment and 3D Path Planning for Disaster Rescue. Drones 2023, 7, 394. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Z.; Li, X. Optimal delivery route planning for a fleet of heterogeneous drones: A rescheduling-based Genetic Algorithm approach. Comput. Ind. Eng. 2023, 179, 109179. [Google Scholar] [CrossRef]
- Chen, M.H.; Lan, Y.Q.; Hu, J.; Xu, Z. An improved edge recombination algorithm for scheduling problems of drone package delivery. J. Discret. Math. Sci. Cryptogr. 2018, 21, 423–426. [Google Scholar] [CrossRef]
- Ito, S.; Akaiwa, K.; Funabashi, Y.; Nishikawa, H.; Kong, X.; Taniguchi, I.; Tomiyama, H. Load and Wind Aware Routing of Delivery Drones. Drones 2022, 6, 50. [Google Scholar] [CrossRef]
- Kornatowski, P.M.; Mintchev, S.; Floreano, D. An origami-inspired cargo drone. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6855–6862. [Google Scholar]
- Kong, F.; Li, J.; Jiang, B.; Wang, H.; Song, H. Trajectory Optimization for Drone Logistics Delivery via Attention-Based Pointer Network. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4519–4531. [Google Scholar] [CrossRef]
- Li, J.; Liu, H.; Lai, K.K.; Ram, B. Vehicle and UAV Collaborative Delivery Path Optimization Model. Mathematics 2022, 10, 3744. [Google Scholar] [CrossRef]
- Alex, C.; Vijaychandra, A. Autonomous Cloud Based Drone system for Disaster Response and Mitigation. In Proceedings of the 2016 International Conference on Robotics and Automation for Humanitarian Applications (Raha), Amritapuri, India, 18–20 December 2016; pp. 183–186. [Google Scholar]
- Yu, K.; Wei, Z.; Feng, Z.; Wu, H.; Chen, X.; Feng, Z. Ecology-Based Resource Allocation for Unmanned Aerial Vehicle Networks. In Proceedings of the 2018 IEEE International Conference on Communication Systems (ICCS 2018), Chengdu, China, 19–21 December 2018; pp. 126–130. [Google Scholar]
- Aydin, Y.; Kurt, G.K.; Ozdemir, E.; Yanikomeroglu, H. Authentication and Handover Challenges and Methods for Drone Swarms. IEEE J. Radio Freq. Identif. 2022, 6, 220–228. [Google Scholar] [CrossRef]
- Thomas, T.; Srinivas, S.; Rajendran, C. Collaborative truck multi-drone delivery system considering drone scheduling and en route operations. Ann. Oper. Res. 2023. [Google Scholar] [CrossRef]
- Markelova, A.; Allahverdyan, A.; Martemyanov, A.; Sokolova, I.; Petrosian, O.; Svirkin, M. Applied routing problem for a fleet of delivery drones using a modified parallel Genetic Algorithm. Vestn. St. Peterbg. Univ. Seriya Prikl. Mat. Inform. Protsessy Upr. 2022, 18, 135–148. [Google Scholar] [CrossRef]
- Beloti Pizetta, I.H.; Santos Brandao, A.; Sarcinelli-Filho, M. Cooperative Load Transportation Using Three Quadrotors. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS’ 19), Atlanta, GA, USA, 11–14 June 2019; pp. 644–650. [Google Scholar]
- Mechali, O.; Xu, L.; Xie, X. Formation Flight Control of Networked-Delayed Quadrotors for Cooperative Slung Load Transportation. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (IEEE Icma 2022), Guilin, China, 7–10 August 2022; pp. 526–531. [Google Scholar]
- Ren, X.X.; Fan, H.M.; Bao, M.X.; Fan, H. The time-dependent electric vehicle routing problem with drone and synchronized mobile battery swapping. Adv. Eng. Inform. 2023, 57, 102071. [Google Scholar] [CrossRef]
- Proia, S.; Cavone, G.; Tresca, G.; Carli, R.; Dotoli, M. Automatic Control of Drones’ Missions in a Hybrid Truck-Drone Delivery System. In Proceedings of the 2023 9th International Conference on Control, Decision and Information Technologies (CoDIT), Rome, Italy, 3–6 July 2023; pp. 1477–1482. [Google Scholar]
- Cavone, G.; Epicoco, N.; Carli, R.; Del Zotti, A.; Ribeiro Pereira, J.P.; Dotoli, M. Parcel Delivery with Drones: Multi-criteria Analysis of Trendy System Architectures. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation (Med), Puglia, Italy, 22–25 June 2021; pp. 693–698. [Google Scholar]
- Freitas, J.C.; Penna, P.H.V.; Toffolo, T.A.M. Exact and heuristic approaches to Truck-Drone Delivery Problems. Euro J. Transp. Logist. 2023, 12, 100094. [Google Scholar] [CrossRef]
- Masone, A.; Poikonen, S.; Golden, B.L. The multivisit drone routing problem with edge launches: An iterative approach with discrete and continuous improvements. Networks 2022, 80, 193–215. [Google Scholar] [CrossRef]
- Saleu, R.G.M.; Deroussi, L.; Feillet, D.; Grangeon, N.; Quilliot, A. The parallel drone scheduling problem with multiple drones and vehicles. Eur. J. Oper. Res. 2022, 300, 571–589. [Google Scholar] [CrossRef]
- Aboueleneen, N.; Alwarafy, A.; Abdallah, M. Secure and Energy-Efficient Communication for Internet of Drones Networks: A Deep Reinforcement Learning Approach. In Proceedings of the 2023 International Wireless Communications and Mobile Computing (IWCMC), Marrakesh, Morocco, 19–23 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 818–823. [Google Scholar]
- Zhang, H.; Xi, S.; Jiang, H.; Shen, Q.; Shang, B.; Wang, J. Resource Allocation and Offloading Strategy for UAV-Assisted LEO Satellite Edge Computing. Drones 2023, 7, 383. [Google Scholar] [CrossRef]
- Xue, Q.; Yang, Y.; Yang, J.; Tan, X.; Sun, J.; Li, G.; Chen, Y. QEHLR: A Q-Learning Empowered Highly Dynamic and Latency-Aware Routing Algorithm for Flying Ad-Hoc Networks. Drones 2023, 7, 459. [Google Scholar] [CrossRef]
- Graham, C.; González, F.; Sanoe, A. Implementation of Partial Observable Markov Decision Process (POMDP) algorithm using Bitcraze Crazyflie Drones. In Proceedings of the 2023 International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland, 6–9 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 850–857. [Google Scholar]
- Tan, Y.; Wang, J.; Liu, J.; Kato, N. Blockchain-Assisted Distributed and Lightweight Authentication Service for Industrial Unmanned Aerial Vehicles. IEEE Internet Things J. 2022, 9, 16928–16940. [Google Scholar] [CrossRef]
- Nar, D.; Kotecha, R. Enhancement of Drone-as-a-Service Using Blockchain and AI. Int. J. Next Gener. Comput. 2022, 13, 885–900. [Google Scholar]
- Balaz, T.; Krejci, J.; Racek, F. Modelling of UAV range measurement. In Proceedings of the Counterterrorism, Crime Fighting, Forensics, and Surveillance Technologies III, Strasbourg, France, 9–12 September 2019; Volume 11166. [Google Scholar]
- Doole, M.; Ellerbroek, J.; Hoekstra, J.M. Investigation of Merge Assist Policies to Improve Safety of Drone Traffic in a Constrained Urban Airspace. Aerospace 2022, 9, 120. [Google Scholar] [CrossRef]
- Estevez, J.; Manuel Lopez-Guede, J.; Grana, M. Quasi-stationary state transportation of a hose with quadrotors. Robot. Auton. Syst. 2015, 63, 187–194. [Google Scholar] [CrossRef]
- Li, H.; Zhu, S.; Tolba, A.; Liu, Z.; Wen, W. A Reliable Delivery Logistics System Based on the Collaboration of UAVs and Vehicles. Sustainability 2023, 15, 12720. [Google Scholar] [CrossRef]
- Sonny, A.; Yeduri, S.R.; Cenkeramaddi, L.R. Autonomous UAV Path Planning Using Modified PSO for UAV-Assisted Wireless Networks. IEEE Access 2023, 11, 70353–70367. [Google Scholar] [CrossRef]
- Lee, S.; Lee, H. Trajectory Generation of a Quadrotor Transporting a Bulky Payload in the Cluttered Environments. IEEE Access 2022, 10, 31586–31594. [Google Scholar] [CrossRef]
- Shankar, A.; Elbaum, S.; Detweiler, C. Towards In-Flight Transfer of Payloads Between Multirotors. IEEE Robot. Autom. Lett. 2020, 5, 6201–6208. [Google Scholar] [CrossRef]
- Estevez, J.; Garate, G.; Lopez-Guede, J.M.; Larrea, M. Review of Aerial Transportation of Suspended-Cable Payloads with Quadrotors. Drones 2024, 8, 35. [Google Scholar] [CrossRef]
- Estevez, J.; Lopez-Guede, J.M.; Garate, G.; Grana, M. A Hybrid Control Approach for the Swing Free Transportation of a Double Pendulum with a Quadrotor. Appl. Sci. 2021, 11, 5487. [Google Scholar] [CrossRef]
- Dhiman, K.K.; Kothari, M.; Abhishek, A. Autonomous Load Control and Transportation Using Multiple Quadrotors. J. Aerosp. Inf. Syst. 2020, 17, 417–435. [Google Scholar] [CrossRef]
- Ferrandez, S.M.; Harbison, T.; Weber, T.; Sturges, R.; Rich, R. Optimization of a Truck-drone in Tandem Delivery Network Using K-means and Genetic Algorithm. JIEM J. Ind. Eng. Manag. 2016, 9, 374–388. [Google Scholar] [CrossRef]
- Ma, Z.; Chen, J. Multi-UAV Urban Logistics Task Allocation Method Based on MCTS. Drones 2023, 7, 679. [Google Scholar] [CrossRef]
- Lee, C.-W.; Wong, W.-P. Last-mile drone delivery combinatorial double auction model using multi-objective evolutionary algorithms. Soft Comput. 2022, 26, 12355–12384. [Google Scholar] [CrossRef]
- Rifan, R.; Adikariwattage, V.; Barros, A. Identification of Urban Air Logistics Distribution Network Concepts. Transp. Res. Rec. 2023, 267, 129–153. [Google Scholar] [CrossRef]
- Ghelichi, Z.; Gentili, M.; Mirchandani, P.B. Drone logistics for uncertain demand of disaster-impacted populations. Transp. Res. Part C Emerg. Technol. 2022, 141, 103735. [Google Scholar] [CrossRef]
- Wu, S.; Yang, Q.; Yang, Z. Integrating express package delivery service with offline mobile sales: A new potential solution to sustainable last-mile logistics in rural China. Int. J. Logist. Res. Appl. 2022. [Google Scholar] [CrossRef]
- Muñoz, G.; Barrado, C.; Çetin, E.; Salami, E. Deep Reinforcement Learning for Drone Delivery. Drones 2019, 3, 72. [Google Scholar] [CrossRef]
- Tu, G.-T.; Juang, J.-G. UAV Path Planning and Obstacle Avoidance Based on Reinforcement Learning in 3D Environments. Actuators 2023, 12, 57. [Google Scholar] [CrossRef]
- Choi, J.; Lee, G.; Lee, C. Reinforcement learning-based dynamic obstacle avoidance and integration of path planning. Intell. Serv. Robot. 2021, 14, 663–677. [Google Scholar] [CrossRef] [PubMed]
- Puri, V.; Nayyar, A.; Raja, L. Agriculture drones: A modern breakthrough in precision agriculture. J. Stat. Manag. Syst. 2017, 20, 507–518. [Google Scholar] [CrossRef]
- Shahi, T.B.; Xu, C.Y.; Neupane, A.; Guo, W. Recent Advances in Crop Disease Detection Using UAV and Deep Learning Techniques. Remote Sens. 2023, 15, 2450. [Google Scholar] [CrossRef]
- Chin, R.; Catal, C.; Kassahun, A. Plant disease detection using drones in precision agriculture. Precis. Agric. 2023, 24, 1663–1682. [Google Scholar] [CrossRef]
- Hafeez, A.; Husain, M.A.; Singh, S.P.; Chauhan, A.; Khan, M.T.; Kumar, N.; Chauhan, A.; Soni, S.K. Implementation of drone technology for farm monitoring & pesticide spraying: A review. Inf. Process. Agric. 2023, 10, 192–203. [Google Scholar]
- Huang, Y.Y.; Li, Z.W.; Yang, C.H.; Huang, Y.M. Automatic Path Planning for Spraying Drones Based on Deep Q-Learning. J. Internet Technol. 2023, 24, 565–575. [Google Scholar] [CrossRef]
- Silva, V.C.; Rocha, M.S.; Faria, G.A.; Xavier Junior, S.F.A.; de Oliveira, T.A.; Peixoto, A.P.B. Boosting algorithms for prediction in agriculture: An application of feature importance and feature selection Boosting algorithms for prediction crop damage. agriRxiv 2021. [Google Scholar] [CrossRef]
- Ali, Z.A.; Abduljabbar, Z.H.; Taher, H.A.; Sallow, A.B.; Almufti, S.M. Exploring the Power of eXtreme Gradient Boosting Algorithm in Machine Learning: A Review. Acad. J. Nawroz Univ. 2023, 12, 320–334. [Google Scholar]
- Kok, Z.H.; Shariff, A.R.M.; Alfatni, M.S.M.; Khairunniza-Bejo, S. Support Vector Machine in precision agriculture: A review. Comput. Electron. Agric. 2021, 191, 106546. [Google Scholar] [CrossRef]
- Wei, P.; Ye, H.; Qiao, S.; Liu, R.; Nie, C.; Zhang, B.; Song, L.; Huang, S. Early Crop Mapping Based on Sentinel-2 Time-Series Data and the Random Forest Algorithm. Remote Sens. 2023, 15, 3212. [Google Scholar] [CrossRef]
- Li, Y.; Ercisli, S. Data-efficient crop pest recognition based on KNN distance entropy. Sustain. Comput. Inform. Syst. 2023, 38, 100860. [Google Scholar] [CrossRef]
- Iqbal, U.; Riaz, M.Z.B.; Zhao, J.; Barthelemy, J.; Perez, P. Drones for Flood Monitoring, Mapping and Detection: A Bibliometric Review. Drones 2023, 7, 32. [Google Scholar] [CrossRef]
- Amarasingam, N.; Hamilton, M.; Kelly, J.E.; Zheng, L.; Sandino, J.; Gonzalez, F.; Dehaan, R.L.; Cherry, H. Autonomous Detection of Mouse-Ear Hawkweed Using Drones, Multispectral Imagery and Supervised Machine Learning. Remote Sens. 2023, 15, 1633. [Google Scholar] [CrossRef]
- Abu Zitar, R.; Mohsen, A.; Seghrouchni, A.E.; Barbaresco, F.; Al-Dmour, N.A. Intensive Review of Drones Detection and Tracking: Linear Kalman Filter Versus Nonlinear Regression, an Analysis Case. Arch. Comput. Methods Eng. 2023, 30, 2811–2830. [Google Scholar] [CrossRef]
- Akbal, E.; Akbal, A.; Dogan, S.; Tuncer, T. An automated accurate sound-based amateur drone detection method based on skinny pattern. Digit. Signal Process. 2023, 136, 104012. [Google Scholar] [CrossRef]
- Hua, X.; Liu, J.; Zhang, J.; Shi, C. An apollonius circle based game theory and Q-learning for cooperative hunting in Unmanned Aerial Vehicle cluster. Comput. Electr. Eng. 2023, 110, 108876. [Google Scholar] [CrossRef]
- Jiang, R.; Zhou, Y.; Peng, Y. A Review on Intrusion Drone Target Detection Based on Deep Learning. In Proceedings of the 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, , 18–20 June 2021; pp. 1032–1039. [Google Scholar]
- Chen, Y.; Aggarwal, P.; Choi, J.; Kuo, C.J. A Deep Learning Approach to Drone Monitoring. In Proceedings of the 2017 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (Apsipa ASC 2017), Kuala Lumpur, Malaysia, 12–15 December 2017; pp. 686–691. [Google Scholar]
- Phung, K.P.; Lu, T.H.; Nguyen, T.T.; Le, N.L.; Nguyen, H.H.; Hoang, V.P. Multi-model Deep Learning Drone Detection and Tracking in Complex Background Conditions. In Proceedings of the 2021 International Conference on Advanced Technologies for Communications (ATC), Ho Chi Minh City, Vietnam, 14–16 October 2021; pp. 189–194. [Google Scholar]
- Yi, K.Y.; Kyeong, D.; Seo, K. Deep Learning Based Drone Detection and Classification. Trans. Korean Inst. Electr. Eng. 2019, 68, 359–363. [Google Scholar] [CrossRef]
- Mandal, S.; Satija, U. Time-Frequency Multiscale Convolutional Neural Network for RF-Based Drone Detection and Identification. IEEE Sens. Lett. 2023, 7, 7003304. [Google Scholar] [CrossRef]
- Cetin, E.; Barrado, C.; Pastor, E. Countering a Drone in a 3D Space: Analyzing Deep Reinforcement Learning Methods. Sensors 2022, 22, 8863. [Google Scholar] [CrossRef] [PubMed]
- Al-Emadi, S.; Al-Ali, A.; Al-Ali, A. Audio-Based Drone Detection and Identification Using Deep Learning Techniques with Dataset Enhancement through Generative Adversarial Networks. Sensors 2021, 21, 4953. [Google Scholar] [CrossRef] [PubMed]
- Jiang, M.; Kong, J.; Zhang, Z.; Hu, J.; Qin, Y.; Shang, K.; Zhao, M.; Zhang, J. Seeing Trees from Drones: The Role of Leaf Phenology Transition in Mapping Species Distribution in Species-Rich Montane Forests. Forests 2023, 14, 908. [Google Scholar] [CrossRef]
- Thomasberger, A.; Nielsen, M.M.; Flindt, M.R.; Pawar, S.; Svane, N. Comparative Assessment of Five Machine Learning Algorithms for Supervised Object-Based Classification of Submerged Seagrass Beds Using High-Resolution UAS Imagery. Remote Sens. 2023, 15, 3600. [Google Scholar] [CrossRef]
- Yandouzi, M.; Grari, M.; Berrahal, M.; Idrissi, I.; Moussaoui, O.; Azizi, M.; Ghoumid, K.; Elmiad, A.K. Investigation of Combining Deep Learning Object Recognition with Drones for Forest Fire Detection and Monitoring. Int. J. Adv. Comput. Sci. Appl. 2023, 14, 377–384. [Google Scholar] [CrossRef]
- Ghali, R.; Akhloufi, M.A. Deep Learning Approaches for Wildland Fires Remote Sensing: Classification, Detection, and Segmentation. Remote Sens. 2023, 15, 1821. [Google Scholar] [CrossRef]
- Antwi, R.B.; Takyi, S.; Karaer, A.; Ozguven, E.E.; Moses, R.; Dulebenets, M.A.; Sando, T. Detecting School Zones on Florida’s Public Roadways Using Aerial Images and Artificial Intelligence (AI2). Transp. Res. Rec. 2024, 2678, 622–636. [Google Scholar] [CrossRef]
- Ravikiran, R.; Savant, A.; Patil, D.; Lathika, A.S.; Muraleedharan, A.V.; Ramanna, M. Design and development of helium assisted quadcopter with object recognition. AIP Conf. Proc. 2023, 2766, 020014. [Google Scholar]
- Pfeiffer, R.; Valentino, G.; D’Amico, S.; Piroddi, L.; Galone, L.; Calleja, S.; Farrugia, R.A.; Colica, E. Use of UAVs and Deep Learning for Beach Litter Monitoring. Electronics 2023, 12, 198. [Google Scholar] [CrossRef]
- Proia, S.; Cavone, G.; Carli, R.; Dotoli, M. Optimal Control of Drones for a Train-Drone Railway Diagnostic System. In Proceedings of the 2023 IEEE 19th International Conference on Automation Science and Engineering (CASE), Auckland, New Zealand, 26–30 August 2023; pp. 1–6. [Google Scholar]
- Wang, L. AI-powered drone-based automated inspection of FAST. Light Sci. Appl. 2023, 12, 63. [Google Scholar] [CrossRef] [PubMed]
- AlRushood, M.A.; Rahbar, F.; Selim, S.Z.; Dweiri, F. Accelerating Use of Drones and Robotics in Post-Pandemic Project Supply Chain. Drones 2023, 7, 313. [Google Scholar] [CrossRef]
- Dai, X.; Nagahara, M. Platooning control of drones with real-time Deep Learning object detection. Adv. Robot. 2023, 37, 220–225. [Google Scholar] [CrossRef]
- Gong, Y.; Liu, X. Flight state recognition for UAV optical flow velocity measurement. J. Phys. Conf. Ser. 2023, 2561, 012025. [Google Scholar] [CrossRef]
- Li, J.; Shen, D.; Yu, F.; Zhang, R. Air Channel Planning Based on Improved Deep Q-Learning and Artificial Potential Fields. Aerospace 2023, 10, 758. [Google Scholar] [CrossRef]
- Da Silva, D.L.; Machado, R.; Coutinho, O.L.; Antreich, F. A Soft-Kill Reinforcement Learning Counter Unmanned Aerial System (C-UAS) with Accelerated Training. IEEE Access 2023, 11, 31496–31507. [Google Scholar] [CrossRef]
- Wu, M.; Zhu, Z.; Xia, Y.; Yan, Z.; Zhu, X.; Ye, N. A Q-Learning-Based Two-Layer Cooperative Intrusion Detection for Internet of Drones (IoD) System. Drones 2023, 7, 502. [Google Scholar] [CrossRef]
- Fotouhi, A.; Ding, M.; Hassan, M. Deep Q-Learning for Two-Hop Communications of Drone Base Stations. Sensors 2021, 21, 1960. [Google Scholar] [CrossRef] [PubMed]
- Jiang, J.; Li, S.; Luo, R.; Zhang, W. Path Planning for Maritime Drones in a Free Space Environment Based on Reinforcement Learning. In Advances in Guidance, Navigation and Control, Proceedings of 2022 International Conference on Guidance, Navigation and Control; Lecture Notes in Electrical Engineering; Springer: Singapore, 2023; Volume 845, pp. 287–299. [Google Scholar]
- Passalis, N.; Tefas, A. Deep Reinforcement Learning for frontal view person shooting using drones. In Proceedings of the 2018 IEEE Conference on Evolving and Adaptive Intelligent Systems (EAIS), Rhodes, Greece, 25–27 May 2018; pp. 1–8. [Google Scholar]
- Karthik, P.B.; Kumar, K.; Fernandes, V.; Arya, K. Reinforcement Learning for Altitude Hold and Path Planning in a Quadcopter. In Proceedings of the 2020 6th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 20–23 April 2020; pp. 463–467. [Google Scholar]
- Fukushima, K.; Nishi, T.; Liu, Z. A Combined Deep Q-Network and Graph Search for Three Dimensional Route Planning Problems for Multiple Mobile Robots. In Proceedings of the 2023 IEEE 19th International Conference on Automation Science and Engineering (CASE), Auckland, New Zealand, 26–30 August 2023; pp. 1–6. [Google Scholar]
- Fotouhi, A.; Ding, M.; Hassan, M. Flying Drone Base Stations for Macro Hotspots. IEEE Access 2018, 6, 19530–19539. [Google Scholar] [CrossRef]
- Parvaresh, N.; Kantarci, B. A Continuous Actor-Critic Deep Q-Learning-Enabled Deployment of UAV Base Stations: Toward 6G Small Cells in the Skies of Smart Cities. IEEE Open J. Commun. Soc. 2023, 4, 700–712. [Google Scholar] [CrossRef]
- Stolaroff, J.K.; Samaras, C.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Energy use and life cycle greenhouse gas emissions of drones for commercial package delivery. Nat. Commun. 2018, 9, 409. [Google Scholar] [CrossRef] [PubMed]
- Rodrigues, T.A.; Patrikar, J.; Oliveira, N.L.; Matthews, H.S.; Scherer, S.; Samaras, C. Drone flight data reveal energy and greenhouse gas emissions savings for very small package delivery. Patterns 2022, 3, 100569. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Number | Year | Features |
|---|---|---|
| [29] | 2022 | Drone classification by morphology |
| [30] | 2019 | Drone classification by morphology |
| [31] | 2019 | Flight time analysis, turning agility and its speed. |
| [32] | 2018 | Common payloads weighing less than 1 kg analysis |
| [33] | 2016 | Low-Altitude Platforms (LAP) |
| [34] | 2006 | Drone classification on altitude |
| [35] | 2014 | Flight time analysis |
| [36] | 2018 | Drone battery charging |
| [37] | 2019 | Strategies to increase flight time |
| Types of Drones | Number of Propellers |
|---|---|
| Tricopter | 3 |
| Quadcopter | 4 |
| Hexacopter | 6 |
| Octocopter | 8 |
| Types of drones | Key Features |
|---|---|
| Fixed-wing | High speed, long endurance |
| Fixed-wing hybrid | Long endurance, VTOL |
| Single-rotor | Long endurance, hovering, VTOL |
| Multirotor | Short endurance, hovering, VTOL |
| Category | Endurance (h) | Flight alt. (m) | Range (km) | Mass (kg) |
|---|---|---|---|---|
| Low-altitude deep-penetration (LADP) | 0.5–1 | 50–9000 | >250 | 250–2500 |
| Low-altitude long-endurance (LALE) | >24 | 3000 | >500 | 15–25 |
| Medium-altitude long-endurance (MALE) | 24–48 | 3000 | >500 | 1000–1500 |
| High-altitude long-endurance (HALE) | 24–48 | 20,000 | >2000 | 2500–5000 |
| Ref | Year | Model | Features | Improvement |
|---|---|---|---|---|
| [2] | 2022 | Benders Decomposition | Optimization routes drone truck | Solutions to the majority of the problem instances |
| [3] | 2019 | N/A | Distributed load, collaborative routing | Distributed charging system |
| [5] | 2022 | Deep Q-Learning | Same-day delivery with vehicles and drones | Improve same-day |
| [6] | 2021 | Multi-Model | Last-mile delivery system with multiple transportation modes | 10% delivery with drones and stations |
| [18] | 2023 | K-Means, GA | Proposed to solve the investigated CVDDN optimization problem | Solve CVDDN |
| [20] | 2021 | RL | Drone delivery system | Route planning and task in collaborative |
| [38] | 2022 | Analysis article | Critically evaluates the practical reality of integrating UAV deliveries | N/A |
| [39] | 2022 | Analysis article | Investigates payload solutions for medium and small package delivery | N/A |
| [40] | 2019 | Analysis article | Flexible and automated in-house transportation | N/A |
| [41] | 2021 | GA-II (ENSGA-II) | Decomposing the problem into smaller manageable subproblems | Route planning approach for a collaborative drone delivery |
| [42] | 2020 | RL | Planning and task allocation in collaborative drone delivery systems | Achieve efficient and effective coordination |
| [43] | 2021 | RL | A tasking strategy that considers the workload | Achieve faster and more efficient delivery |
| [44] | 2023 | AGA | Trajectory planning method using sine–cosine particle swarm | Simulations validate the method |
| [45] | 2023 | MIC, GA | Extending Vehicle Routing Problem (VRP) | Algorithms solve the problem efficiently for test instances |
| [46] | 2018 | HBERA | Minimizing delivery time and tardiness | Computations show clearly optimal solutions |
| [47] | 2022 | FSVRPLW | Drone delivery in which flight time is dependent on the weight | Flight time largely depends on the weight of packages |
| [48] | 2017 | N/A | Limitations by integrating quadcopter protective cage | Reduce its storage volume by 92% |
| [49] | 2023 | A-Ptr-Net | Trajectory optimization problem | Trajectory optimization |
| [50] | 2020 | Distributed Routing Algorithm | A distributed routing paradigm | Effectiveness in time and payload |
| [51] | 2016 | Cloud Drones Network | Network of drones with different tasks | N/A |
| [52] | 2018 | Prey-predator (HTC and UAV) | Balance MTC and HTC | HTC and UAV can converge to equilibrium |
| [53] | 2022 | Red 5G NR | Drone swarm authentication | Quick authentication method |
| [54] | 2021 | Routing UAV, KNN, MILP | Reduction in total delivery time, route optimization | Significant reduction in delivery time |
| [55] | 2022 | MDPGA | Drone coordination, limited carrying capacity | Reduction in transport costs |
| [56] | 2019 | RL | Stability of training | Use of team of three UAVs in training |
| [57] | 2020 | PID y PD Control | Transport of suspended loads | Flight model with suspended loads |
| [58] | 2023 | LNS-QL | Last-mile delivery system with Electric Vehicles (EV) | Cost and emission improve |
| [59] | 2023 | LQR | Last-mile delivery | Positive simulation results |
| [60] | 2021 | DEA | Comparison of delivery systems | Three systems: only trucks, only drones, hybrid truck–drone |
| [61] | 2023 | KNN, Tabu Search | Truck–Drone Delivery Problems (TDDP) | 80% of the best known solutions were improved |
| [62] | 2020 | PSO | Real-time collision avoidance | Positive simulation, graph-based routing |
| [63] | 2022 | Hybrid Metaheuristic | Address traveling salesman problem | Minimize delivery time |
| [64] | 2023 | DRL | Long-distance missions | Evaluation through simulations of parcel delivery |
| [65] | 2023 | DDPG-LSTM, MDP | Minimization of energy consumption | Evaluation through simulations |
| Ref | Year | Model | Features | Improvement |
|---|---|---|---|---|
| [10] | 2023 | ML | Using small drones to forage and pollinate flowers | Identify and pollinate areas in need (87.3% accuracy) |
| [11] | 2023 | ML | Detection of flooding and weeds | Detecting flood zones |
| [14] | 2021 | SVM | Detection flooding and weeds | Detect flood zones |
| [15] | 2016 | KNN | Detection flooding and weeds | Detect flood zones |
| [16] | 2020 | RF | Detection flooding and weeds | Detect flood zones |
| [89] | 2021 | N/A | To highlight the importance of drones in agriculture | N/A |
| [90] | 2023 | ML | To review the actual progress in crop disease detection | N/A |
| [91] | 2023 | CNN | Automation of plant disease detection | % of disease detection |
| [90] | 2023 | ML, DL | Analysis of drone technologies in the agricultural sector | N/A |
| [91] | 2023 | RL, DNN | Optimize pesticide spraying | RL is more effective |
| [96] | 2021 | SVM | Detection flooding and weeds | Detect flood zones |
| [97] | 2023 | RF | Detection flooding and weeds | Detect flood zones |
| [98] | 2023 | KNN | Detection flooding and weeds | Detect flood zones |
| [99] | 2023 | Analysis of publications | Detection flooding and weeds | Detect flood zones |
| [100] | 2023 | RF, XGB, KNN, SVM | Detection flooding and weeds | 97% (RF, XGB)–96%, 72% (KNN, SVM)–97%, 97% y 80% (RF, KNN y SVM) |
| Ref | Year | Model | Features | % Accuracy |
|---|---|---|---|---|
| [101] | 2023 | Kalman Filters (KF) | Drone (UAV) detection and tracking | N/A |
| [102] | 2023 | DT, Discriminant (D), SVM, KNN and EC | ADr detection on skinny model and INCA patterns | 99.72% using KNN |
| [103] | 2023 | Apollonius Circle and QL For Cooperative Hunting (ACGQ-CH) | The hunting time by 16.83, 27.35 and 12.56% | N/A |
| [104] | 2021 | DL | Intruder drone target detection | N/A |
| [105] | 2017 | DL | Drone identification through imagery | 11–16% improvements |
| [108] | 2023 | DL, DNN | Radio frequency detect and identify drones | 99.7%, 84.5%, 46.8% detection (presence, type, flight) |
| [109] | 2022 | DRL, DQN | Counter a drone in 3D space using another drone | Successful hunt for the invading drone |
| [110] | 2021 | DL | Detect and identify processes using acoustic | N/A |
| Ref | Year | Model | Features | % Accuracy | DA | I |
|---|---|---|---|---|---|---|
| [8] | 2023 | Keras-RetinaNet with ResNet 50 | Detected buildings | Average 77.99% | Yes | N/A |
| [9] | 2021 | DL | Evaluation of cracks in high rise bridge pillars | N/A | Yes | N/A |
| [12] | 2023 | DL | Detect and geo-reference different traffic signs | 55% reduction in time; 55% increase in safety | Yes | Yes |
| [13] | 2023 | CNN | Aerial inventories of spruce seedlings | 84% mean accuracy, 97.86% detection | Yes | Yes |
| [111] | 2023 | KNN, CART, SVM y RF | Tree condition identification | 83% with KNN | Yes | N/A |
| [112] | 2023 | Bayes DT RT KNN SVM | Classifying seagrass meadows | 94% Bayes classifier–18–97% SVM | Yes | N/A |
| [114] | 2023 | DL | Remote fire detection systems | 90% average in the various cases | Yes | N/A |
| [115] | 2023 | DL, Computer Vision | Detect school zone pavement markings | 94% | Yes | Yes |
| [87] | 2023 | MDP, QL, DQL | Detection of aquaculture cages scattered at sea, obstacle avoidance | 50% improved computational performance | Yes | Yes |
| [117] | 2023 | DL, YOLOv5 | Object detection, detect litter objects in footage | 50–95% | Yes | Yes |
| Ref | Year | Model | Features | DC | S | % Security | IoD | SE |
|---|---|---|---|---|---|---|---|---|
| [122] | 2023 | Optical flow control algorithm, KNN, SVM | Flight speed, vertical takeoff and landing | Yes | N/A | N/A | N/A | N/A |
| [123] | 2023 | DQN | Regular UAV behavior, urban air traffic control | N/A | Yes | N/A | N/A | N/A |
| [124] | 2023 | RL, spoofing, meaconing | Security control, counter unmanned aerial system (C-UAS) | Yes | Yes | 99% within 75 m radius | N/A | N/A |
| [125] | 2023 | Q-Learning, Q-TCID, Markov optimization | Intrusion detection, IoD | N/A | Yes | N/A | Yes | N/A |
| [128] | 2018 | RL | Autonomous flight | Yes | Yes | N/A | N/A | Yes |
| [129] | 2020 | RL, QL | Obstacle avoidance | Yes | Yes | N/A | N/A | Yes |
| [130] | 2024 | DQN | Obstacle avoidance, path planning | Yes | Yes | 6% computation time | N/A | N/A |
| Ref | Year | Features | Network Performance Improvement | CS | DCM | HG | BS |
|---|---|---|---|---|---|---|---|
| [131] | 2018 | Movement control algorithm | 82% | N/A | Yes | Yes | Yes |
| [132] | 2023 | Continuous critical actor RL/ACQL | 85% compared to other lines based on QL and DQL | 45 Mbps | Yes | Yes | Yes |
| Ref | Y | F | NT | PW | E | ER | MR | NUW | PS | GR | REC |
|---|---|---|---|---|---|---|---|---|---|---|---|
| [133] | 2018 | N/A | N/A | N/A | N/A | N/A | 4 km | Yes | Yes | Yes | Yes |
| [134] | 2022 | N/A | 128 flights | 0.5 kg | 70 g CO2 | 94% lower | N/A | N/A | N/A | Yes | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caballero-Martin, D.; Lopez-Guede, J.M.; Estevez, J.; Graña, M. Artificial Intelligence Applied to Drone Control: A State of the Art. Drones 2024, 8, 296. https://doi.org/10.3390/drones8070296
Caballero-Martin D, Lopez-Guede JM, Estevez J, Graña M. Artificial Intelligence Applied to Drone Control: A State of the Art. Drones. 2024; 8(7):296. https://doi.org/10.3390/drones8070296
Chicago/Turabian StyleCaballero-Martin, Daniel, Jose Manuel Lopez-Guede, Julian Estevez, and Manuel Graña. 2024. "Artificial Intelligence Applied to Drone Control: A State of the Art" Drones 8, no. 7: 296. https://doi.org/10.3390/drones8070296
APA StyleCaballero-Martin, D., Lopez-Guede, J. M., Estevez, J., & Graña, M. (2024). Artificial Intelligence Applied to Drone Control: A State of the Art. Drones, 8(7), 296. https://doi.org/10.3390/drones8070296