1. Introduction
The advent of advanced autonomous drones and their continuous technological evolution has marked a significant milestone in various industrial sectors improving the performance and capacity of industrial processes. This progress has revolutionized sectors such as agriculture, infrastructure inspection and environmental monitoring. Likewise, innovative applications are emerging, such as the use of drones to create access points, thus providing a constant connectivity service in areas where internet access is limited. Drones have facilitated cargo transportation achieving economies of scale by trajectory optimization and extended autonomies both in range and in operation by the integration of AI in the control systems of drones. The evolution of this technology allows complex decisions to be made autonomously in real time by exploiting Deep Learning (DL) algorithms and massive data processing techniques.
The development of autonomous navigation systems provides greater adaptability and efficiency in trajectory optimization, especially in dynamic environments. In addition, AI has proven to be essential in predictive maintenance and failure detection, contributing to the reliability and safety of drones. In the area of cargo transportation, AI has revolutionized logistics operations by facilitating the planning of optimal and adaptable routes. This dynamic approach, supported by real time tracking capability, not only improves operational efficiency but also contributes significantly to building a more sustainable logistics future.
However, the use of AI for autonomous decision making embedded in drones also poses ethical and regulatory challenges. The balance between the autonomy of these systems and human supervision has become a critical point of debate in the development of this emerging technology.
Although there are numerous papers that focus on specific aspects of the technology applied in this field, it is of particular interest to make a comprehensive compilation that addresses the various significant applications and algorithms in the field of AI and drones. The existing literature focuses on particular tasks or algorithms, such as cargo transporting [
1,
2] and transport paradigms [
3,
4], logistics [
5,
6], trajectory optimization [
7], object detection [
8,
9], agricultural operations [
10,
11] and inventory [
12,
13] without offering a complete view of the global applications of AI drones (
Figure 1).
This study of the state of the art is not limited to cargo transportation developments in the literature, but seeks to identify and examine in detail the most salient AI algorithms that have proven effective in various drone operations. The organization of the contents covers a contextualization of the main AI algorithms and cross cutting theoretical aspects, followed by their applications in drones, taking into account the functional area, innovation, and relevance in this field. A wide range of notable contributions in this field are explored, from the application of DL algorithms for real-time object detection and recognition to the use of massive data processing techniques for dynamic path optimization.
The remainder of this paper is as follows.
Section 2 is dedicated to explaining the search methodology used in this paper. A background that covers a review of the theoretical foundations of AI and autonomous decision making and other relevant aspects is presented in
Section 3.
Section 4 describes various avant garde applications, while
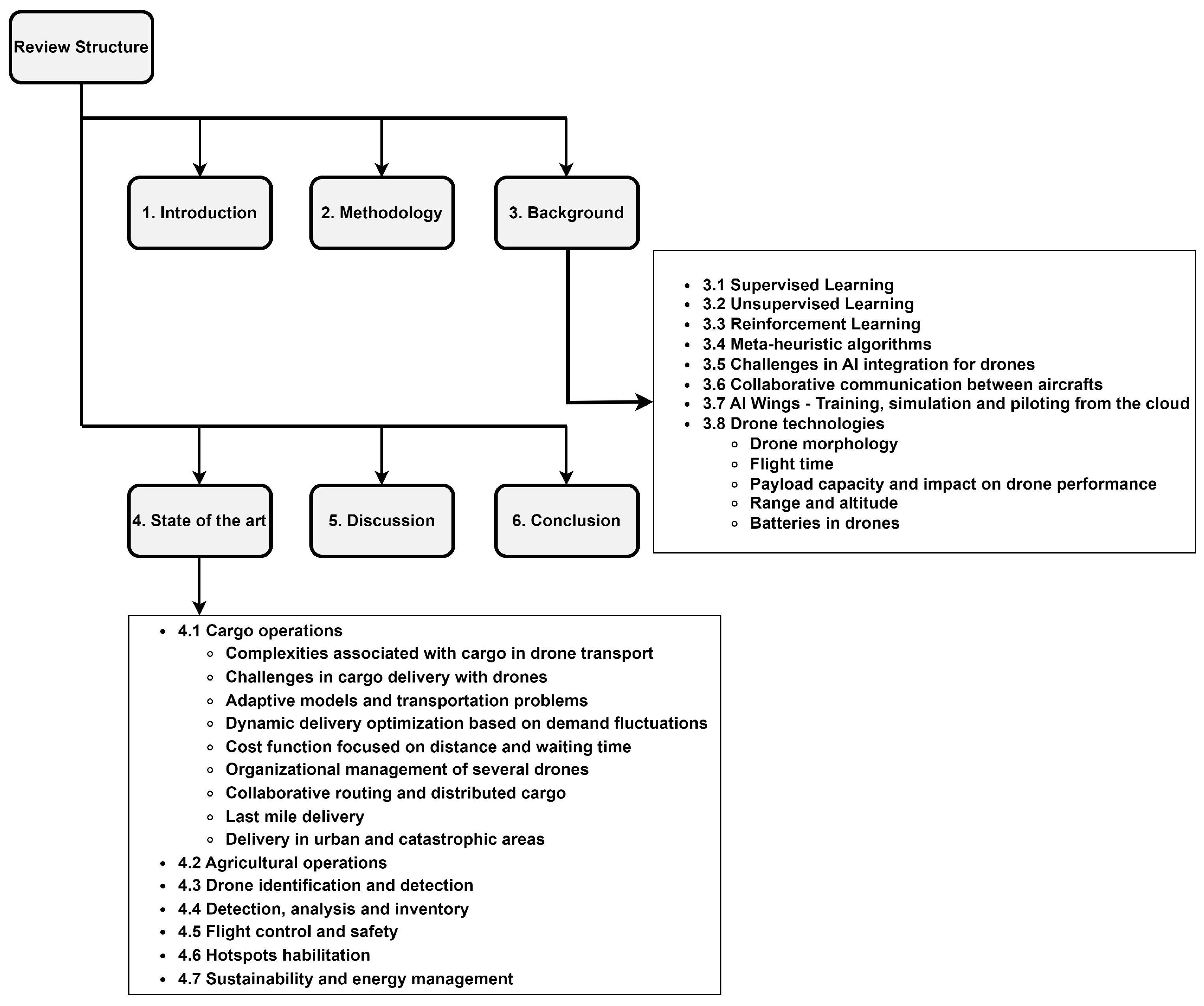
Section 5 gives a discussion where summarized ideas and aspects are presented from an objective perspective. Finally, the conclusions section provide the key findings and points out future research directions. In order to ease the reading of the paper, a graphical outline is shown in
Figure 2.
2. Methodology
To carry out the study of the state of the art on the selected topic, a structured methodology is followed based on the search and analysis of relevant scientific articles. Queries have been made on Web of Science, IEEE (Xplore Digital Library), and Google Scholar, which have been selected for their extensive content and updated information on scientific articles. During this process, a lot of papers were identified that address the topic of study published in scientific journals and with solid methodological approaches. The detailed review of these articles allows the identification of trends, thus providing a comprehensive view of the current state of AI applications in drones.
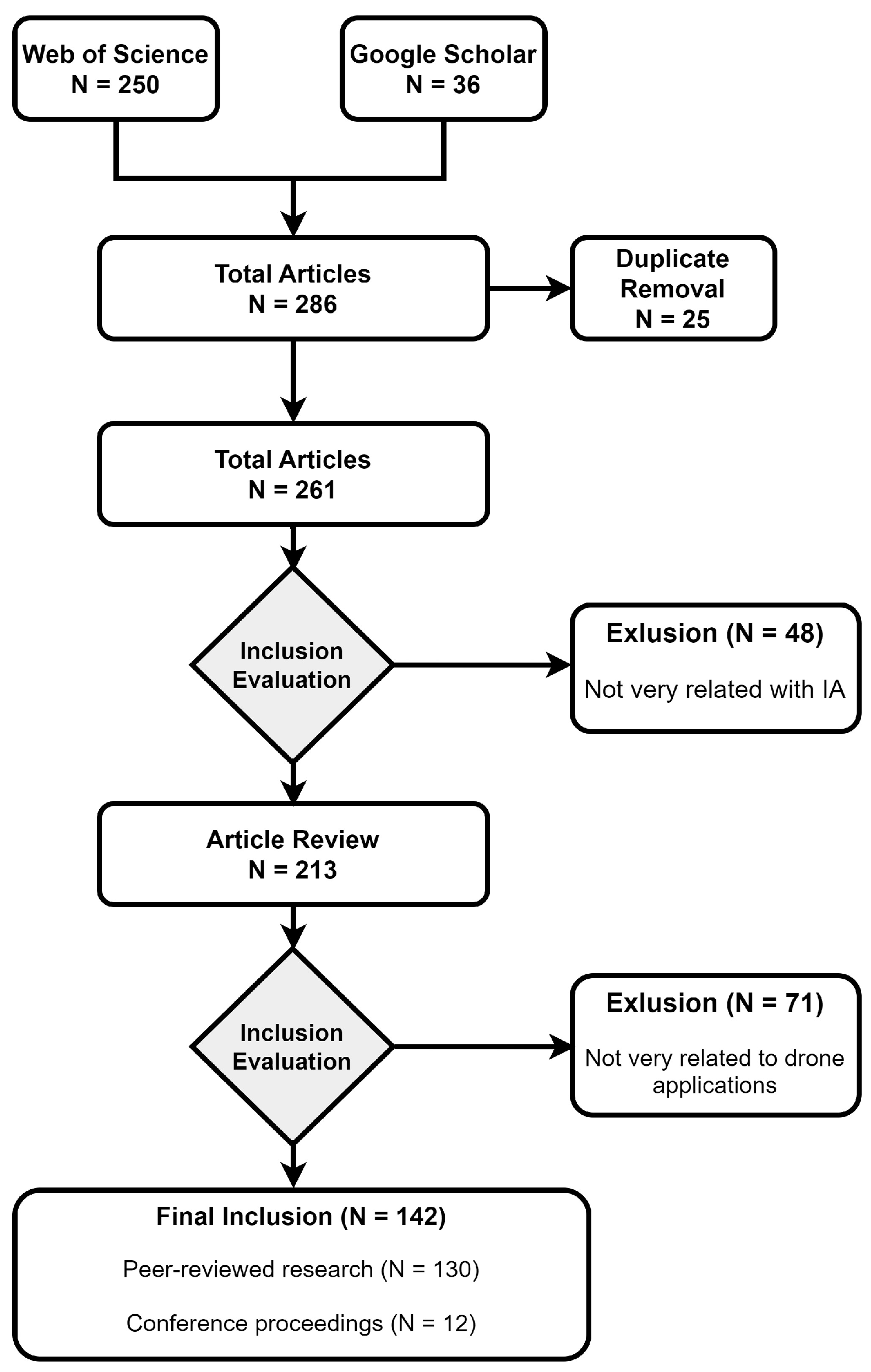
Due to the large amount of search results, some search and filtering criteria were established. Firstly, some of the main search terms are: “cargo transport* with drones”, “autonomous drone flight”, “cooperative load transportation quadrotors”, “types of UAV cargo”, “delivery of packages with drones”, “delivery of packages with drones”, “cargo transporting strategy UAV”, “cargo transporting strategy multirotor”, “cargo drones”, “drones and logistics” in the title, abstract or keywords of the papers. These terms have been chosen to accurately address the relevant aspects of the research topic and AI. In this case, all terms have been pre-filtered to ensure that everything presented falls within the scope of AI. Some of the main AI-based filtering terms are: “Artificial Intelligence”, “Algorithm”, “Artificial Intelligence Algorithm”, “Machine Learning”, “AI”. As an example, one of the expressions used is: “cargo transportation* with drones * Artificial Intelligence Algorithm”. To facilitate the visualization of the exclusion criteria, a graphical scheme is shown in
Figure 3.
The primary selection condition was that publication date was after 2019, except when an article published prior to 2019 was deemed exceptionally relevant to the topic (up to 9% of the articles). The main motivation for selecting this date was to establish a lower boundary criterion for a comprehensive analysis of the state of the art from that date onwards. Due to the robustness of the AI algorithms presented and the standardization of many drone operations, it is interesting to set this limit in order to incorporate the most innovative operations. The purpose here is to showcase applications in this field that are both stable and innovative.
Once all the relevant paper references have been obtained and filtered according to the established criteria, a detailed breakdown is carried out to classify the aspects in which AI affects drone operations. This classification approach has identified specific areas of impact, such as autonomous navigation, visual recognition, drone collaboration, Machine Learning (ML) and ethical and regulatory considerations.
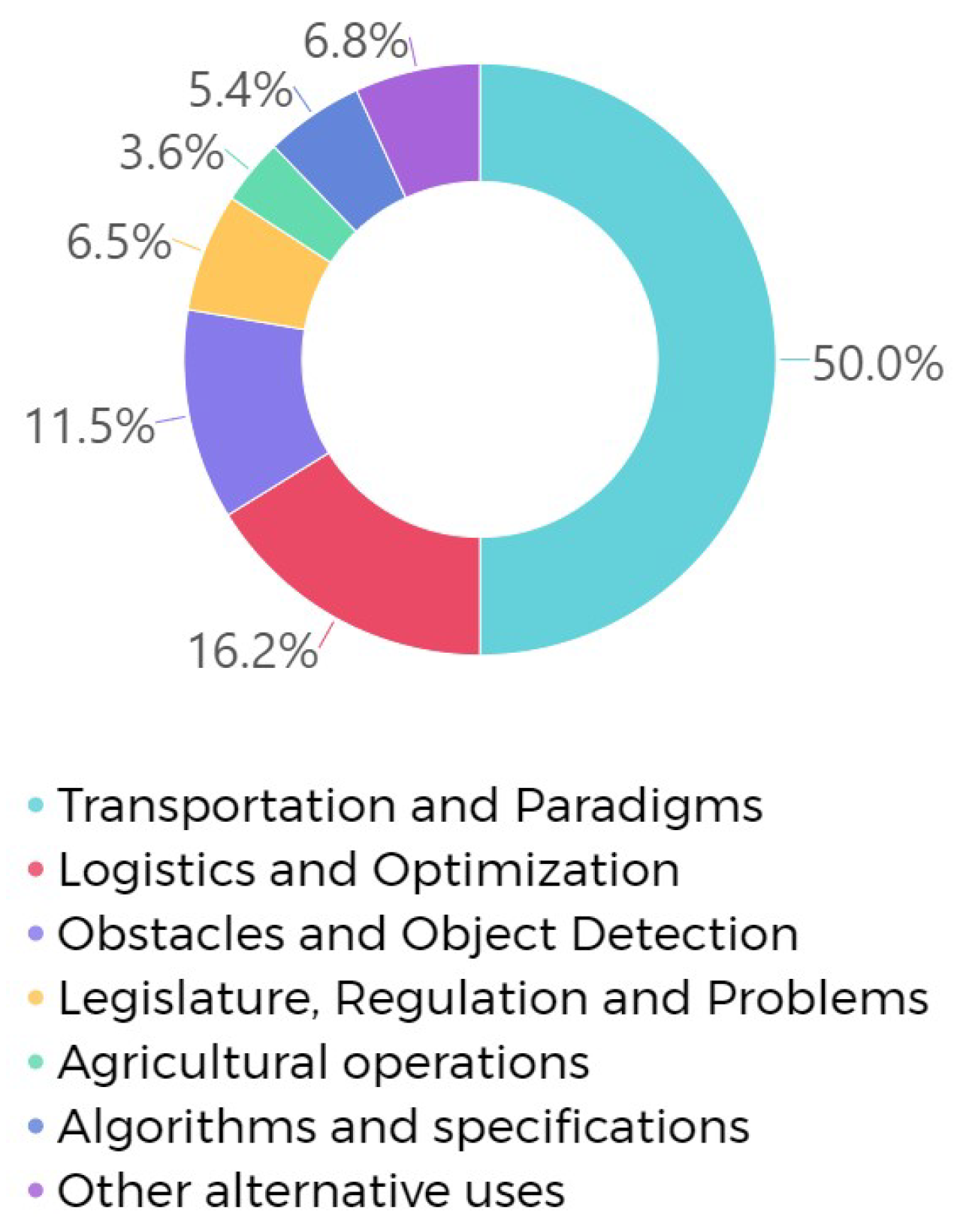
In
Figure 4, there is a representation of this classification in graphic form, highlighting the most recurrent and relevant topics. This visualization offers a clear perspective of how AI is influencing drone operations, and how these topics interact to drive significant advances.
3. Background
Thanks to the development of various techniques and methodologies, AI has experienced significant advances in recent decades. Techniques such as ML stand out for their ability to provide autonomy in decision making through interaction with the environment.
ML is an important component of the growing field of data science. Through the use of statistical methods, models are trained to make classifications or predictions by discovering key information in various data mining-based projects. In this context of evolution, DL emerges as an advanced technique within ML, consisting of artificial neural networks with multiple layers. These deep structures allow us to address complex tasks, such as recognizing patterns in images or understanding natural language.
There are a wide variety of ML algorithms, and it is beneficial to pre-classify them into categories following some basic criteria. One of the main and most significant criteria is related to the way in which the algorithms are trained. In this classification, four main methodologies are distinguished: supervised learning, unsupervised learning, and Reinforcement Learning (RL). A new type of methodology called semi-supervised learning arises when labeling the data is difficult. Semi-supervised learning is able to handle both labeled and unlabeled data. Most semi-supervised learning algorithms are combinations of unsupervised and supervised algorithms.
3.1. Supervised Learning
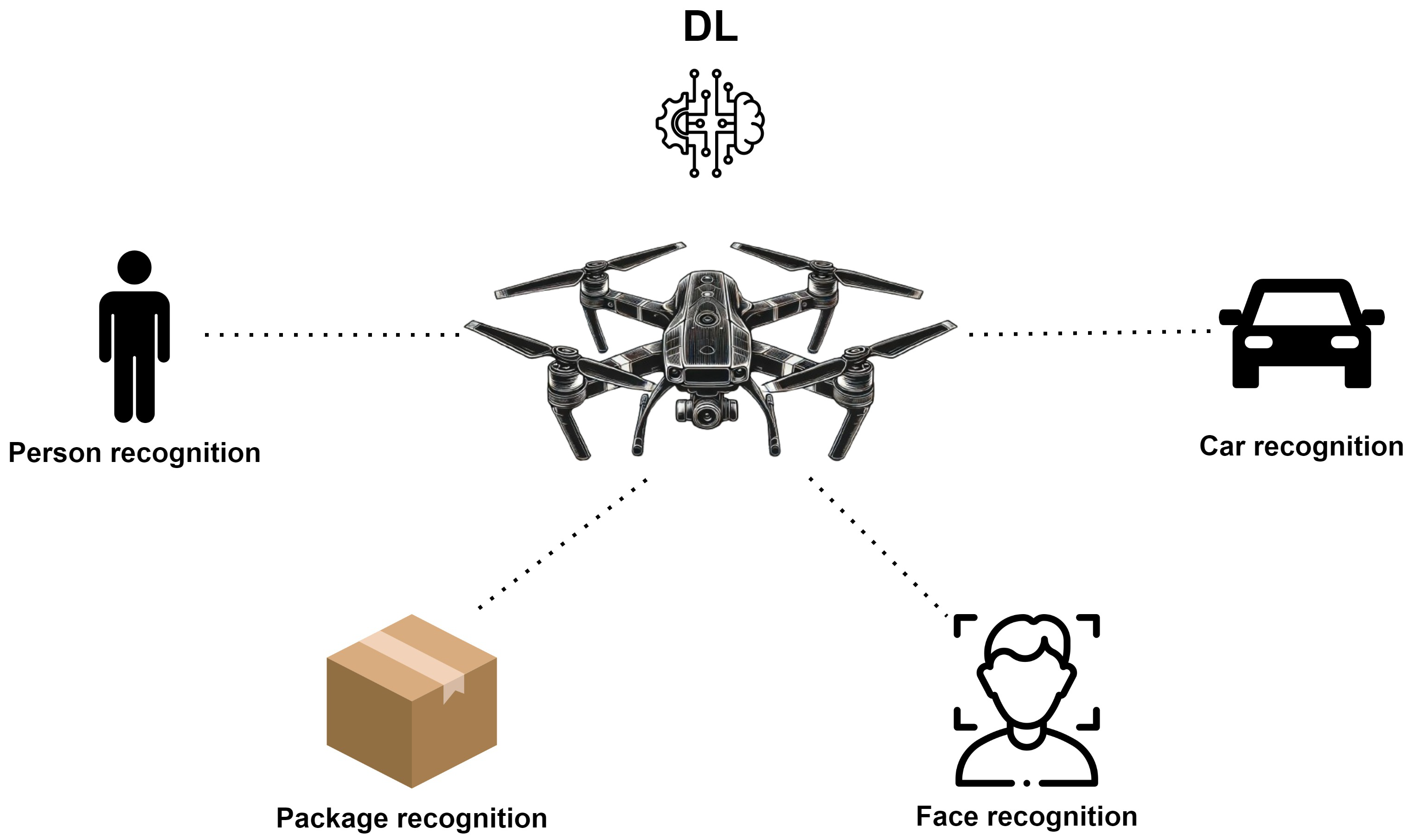
Supervised learning is defined by the use of labeled data sets to train models that accurately classify data or predict outcomes.
This technique allows organizations to solve a wide variety of real world problems at scale, such as sorting spam into a folder other than the inbox. Various algorithms and calculation techniques are used in this process (Support Vector Machine (SVM) [
14], K-nearest neighbors (KNN) [
15], Random Forest (RF) [
16], etc.). One specific branch of supervised learning is DL, which has applications that cover a wide range of fields, including voice and image recognition (
Figure 5), automatic translation, medical diagnosis, and autonomous driving.
As a particular case, DL has significantly influenced the evolution of drones, especially in the field of parcel delivery. Drones can now specialize both individually and collectively, adapting to the characteristics of the load, thereby optimizing delivery processes.
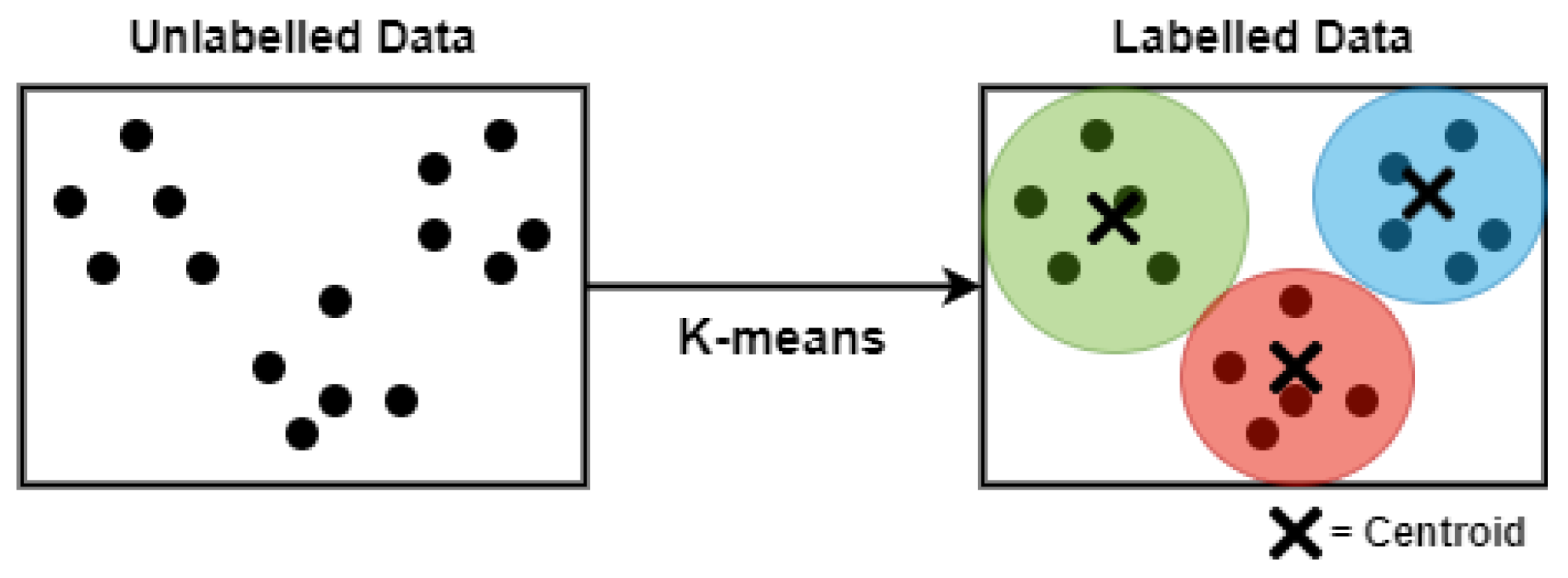
3.2. Unsupervised Learning
Unsupervised learning carries out the clustering of unlabeled data sets. These algorithms discover hidden data groupings or patterns without the need for any human intervention. Their ability to discover similarities and differences in information makes them the ideal solution for exploratory data analysis, cross selling strategies, customer segmentation, and image recognition. One of the most important algorithms presented in this methodology is the K-Means algorithm [
17], whose theoretical basis is based on dividing a set of data into ‘k’ groups or clusters. Its main objective is to minimize the sum of the squared distances between the data points and the centroids of their respective clusters (
Figure 6).
As far as the field of drones is concerned, it presents a series of significant benefits and disadvantages. On the one hand, it can be a beneficial strategy in several situations such as object detection, image segmentation, navigation, and path planning [
18]. On the other hand, the k-means algorithm presents some limitations such as the need to specify the number of ‘k’ clusters a priori, the sensitivity to the initial selection of centroids, and the tendency to produce spherical clusters of similar sizes, implying that in some applications focused on drones, it may be beneficial to explore other types of techniques that obtain more satisfactory results.
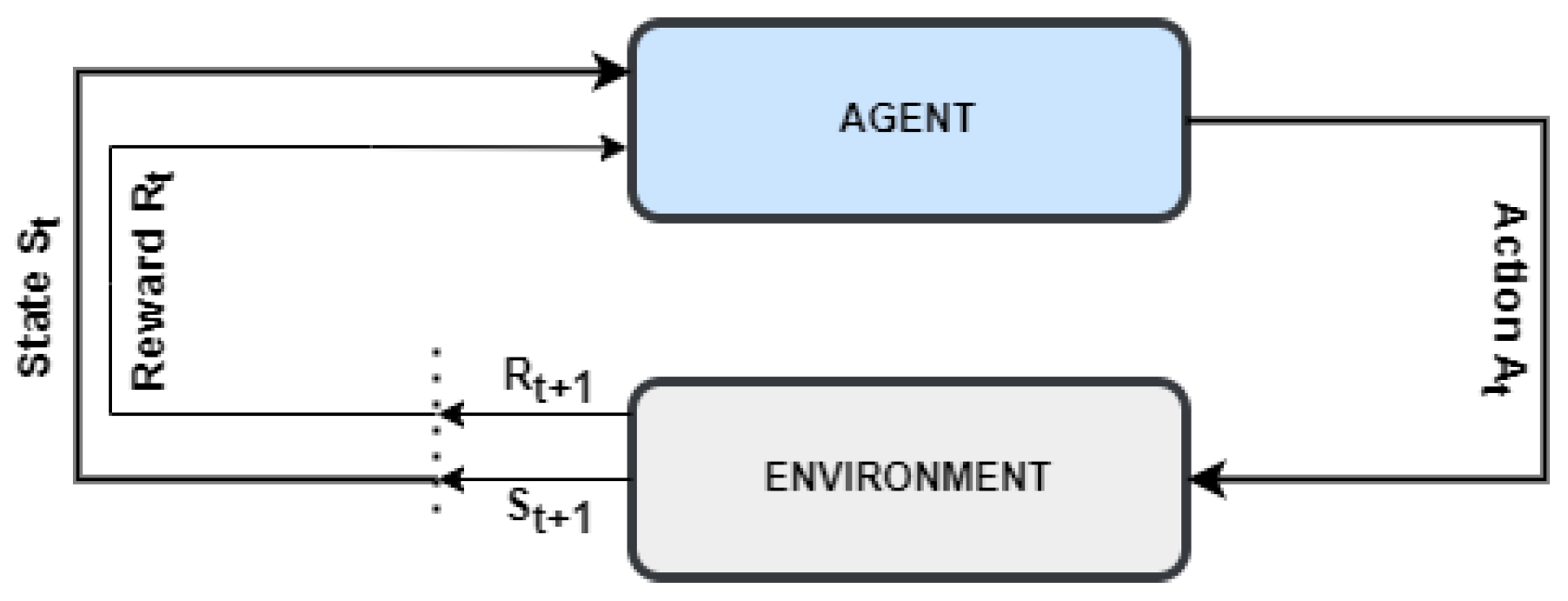
3.3. Reinforcement Learning
Another of the most important techniques is RL, whose main characteristic is to learn through interaction with the environment, making sequential decisions and receiving feedback, establishing a system of rewards and penalties (
Figure 7). The choice of the appropriate strategy is carried out autonomously, trying to obtain the best possible reward in all the decisions that are made. For example, many robots use reinforcement learning to learn to walk.
Like an RL base algorithm, Q-Learning (QL) is presented, whose objective is to train agents with the capacity to make decisions optimally in unknown environments and who present a high degree of dynamism. As it is based on a reward system, it can be applied innovatively in various fields such as collaborative load sharing.
In this context, a methodology that takes advantage of RL adopting a hierarchy approach is presented. This approach makes a division into two main strategic levels.
The first level or higher level is in charge of making global decisions about the delivery of packages and the second level or lower level is in charge of making decisions about individual drones to meet the objectives. This implementation concept bi-level of the QL algorithm allows establishing greater scalability and improved efficiency at the global level of the system [
19].
Performance is demonstrated in terms of efficiency and scalability in the delivery of packages with drones. This methodology not only presents a special advance in logistics with drones, but also stands out for presenting the potential of hierarchical RL to address complex challenges in dynamic environments whose objective is collaborative decision making. Continuing with RL, another fundamental approach in solving sequential decision making and optimization problems is Markov optimization. This methodology is used in situations where the decisions made are only related to the current state of the system, this approach being the fundamental support of the Markov property, which is based on the fact that the future state of a system is only conditioned by the present state without taking into account the path that led to it.
Transferring this methodology to the field of drones, a distributed communication paradigm is presented that enhances collaboration between aircraft in charge of delivery logistics [
20]. This mechanism, applied in the context of collaborative delivery, capitalizes on the Markov property by allowing drones to collaborate in real time based only on the systems present state and immediate conditions.
3.4. Meta-Heuristic Algorithms
Meta-heuristic techniques are advanced search methods used to address optimization problems that present great complexity. Solving such problems involves the task of identifying the most appropriate solution among an extensive set of possibilities. Although these strategies do not guarantee the identification of the optimal solution in a defined time interval, it has been observed that they can generate high-quality results in time periods considered acceptable. Regarding combinatorial optimization, especially in situations where an individual exhaustive analysis is inefficient, these strategies are predominantly implemented.
Paradigmatic examples of meta-heuristic algorithms include the ant colony optimization algorithm (ACO) [
21], the genetic algorithm (GA) [
22], the simulated annealing algorithm (SA) [
23], the tabu search algorithm (TS) [
24], and the particle swarm optimization algorithm (PSO) [
25].
These tools are used in different contexts, from planning transport routes and managing schedules, to optimizing technical methods and managing telecommunications systems. Meta-heuristic algorithms are valued for their flexibility in addressing complex challenges in which obtaining direct answers is difficult or involves considerable computational cost.
To optimize the logistics distribution of goods, a two stage methodology that integrates heuristic and meta-heuristic tactics is recommended. This approach is aimed at perfecting the comprehensive delivery system, combining ground transportation and the use of drones in cities with traffic restrictions [
26]. The method comprises two essential phases: the creation of routes for vehicles and drones, which benefit from the use of techniques such as tabu search and the ACO algorithm and the synchronization in the handling of deliveries, where the variable neighborhood search (VNS) is used.
Likewise, meta-heuristic algorithms play a crucial role in strengthening communications systems, applying them to the improvement of FANET networks (flying ad hoc networks), seeking optimization through specific procedures derived from said algorithmic tools [
27].
As a particular case, the use of GA in the context of drones has proven to be an effective strategy for addressing various challenges, such as path planning, flight control, obstacle detection, and the optimization of control parameters [
18]. These algorithms, inspired by natural evolution and genetics, leverage biological concepts to solve search and optimization problems, especially in conditions where conventional approaches might be inefficient.
The basic operation of a GA involves the creation of an initial population of candidate solutions, represented as individuals. The evaluation of these individuals is carried out using a fitness function that measures their effectiveness in solving the problem in question. Through iterations involving selection, crossover and mutation processes, the algorithm generates new solutions, constantly seeking to improve the fitness of the population. This cycle repeats until a stopping criterion is met, such as reaching a maximum number of generations or achieving a good enough solution.
The application of GA in the context of drones covers a variety of challenges and problems, from collaborative distribution to route planning and mission assignment in three dimensional environments, highlighting their versatility and effectiveness in solving complex problems in this field.
3.5. Challenges in AI Integration for Drones
Due to the large amount of data generated and the computational need to be treated and evaluated, cloud simulation is presented as a novel aspect, an essential tool in the development and research of intelligent systems. Through the ability to simulate complex environments in a stepwise and accessible manner, important advances are enabled in areas such as autonomous robotics, space exploration, and pilot training.
Despite the progress made, there are challenges in the integration of AI technology into the operational drones. One of the main challenges is the optimization of DL algorithms for execution in cloud simulation environments. While AI has demonstrated great applications, knowledge gaps persist in areas such as the interpretation of DL models, the adaptability of (RL) algorithms to dynamic environments, and computational efficiency in complex simulations in the cloud.
3.6. Collaborative Communication between Aircrafts
Through the implementation of a Deep Reinforcement Learning (DRL) approach, a comprehensive decision-making framework is established, where the drone develops its local policy by directly observing the state of the environment in its proximity and the reception of messages from neighboring drones. This method aims to encourage cooperation between drones in the generation of highly optimized multiple trajectories. This collaborative approach implicitly leads to the minimization of resources needed to carry out operations [
7].
The drone, by dynamically learning from its immediate environment, manages to adjust its behavior autonomously. This approach not only optimizes the individual trajectories of the drones, but also contributes to the overall optimization of the system, since the cooperative generation of routes seeks to reduce resource consumption as much as possible.
The uniqueness of this approach lies in its ability to adapt in real time to changes in the environment, such as modifications in topology or adjustments in resource availability. Furthermore, by promoting the cooperative generation of optimal trajectories, this distributed RL framework effectively acts in the overall minimization of the resources required to carry out drone logistics operations. The application of this innovative approach not only stands out for its efficiency, but also provides an advanced solution for the collaborative management of drones in dynamic and complex environments.
3.7. AI Wings—Training, Simulation, and Piloting from the Cloud
AI Wings represents an innovative drone solution based on the Internet of Things (AIoT) with the purpose of controlling multiple drones and deploying AI models. This system features a highly secure cloud server that serves as a control center to effectively coordinate and direct drone fleets.
A distinctive feature of AI Wings is the integration of Virtual Reality (VR) simulation using AirSim drone simulation software. This offers a realistic platform for training and testing, allowing operators to simulate drone missions in virtual environments. This VR simulation facilitates the evaluation and continuous improvement of AI models, thus contributing to the optimal performance of drones in real situations [
28].
3.8. Drone Technologies
In this section, some important technical aspects related to drones are presented. Fundamental technical characteristics will be explored, including their payload capacity, flight range and altitude, and battery recharging methods. In addition, the main technical challenges and innovative solutions that are emerging in the field of autonomy and recharging will be discussed. This review will provide an understanding of the technologies that are driving the evolution of drones in various applications. A summary of the most significant references can be found in
Table 1.
3.8.1. Drone Morphology
Drones come in numerous specifications, sizes and configurations. They are classified into four main categories: fixed-wing, hybrid fixed-wing, single-rotor, and multi-rotor, also considering the number of rotors [
29,
30]. Fixed-wing drones are ideal for aerial surveys and mapping due to their stable and long-endurance flight capability. Hybrid fixed-wing drones combine automation with manual gliding, offering a balance between manoeuvrability and efficiency. Single-rotor drones, while more complex and costly, provide exceptional accuracy for specific tasks, such as detailed topographic surveys. Finally, multi-rotor drones, especially quadcopters, are highly valued for their agility, vertical take-off and landing capabilities, and are commonly used in surveillance and aerial photography applications. Multirotor drones can be tricopters, quadcopters, hexacopters, or octocopters as shown in
Table 2. The main characteristics of each of the drone categories can be seen in
Table 3.
3.8.2. Flight Time
Small drones can fly at speeds of less than 15 m/s, while large drones can reach up to 100 m/s. Drone speed must be properly controlled at turning points to improve energy efficiency. In ref. [
31], the authors focus on the relationship between the drones turning agility and its speed. Flight time, which is influenced by size, weight and weather conditions, is crucial. Large drones can fly for hours, while small drones are limited to 20–30 min. Other aspects that affect flight time are the autopilot and GPS system.
3.8.3. Payload Capacity and Impact on Drone Performance
The payload capacity that a drone can carry varies from a few grams to several hundred kilograms. While a larger payload allows more accessories to be carried, it generally decreases flight time due to the increased battery consumption and size of the drone. Common payloads include sensors and video cameras used for surveillance and reconnaissance, including electronic devices weighing less than 1 kg [
32]. Heavy payloads tend to shorten flight time, but a drone with a larger surface area and more motors can store more energy, which improves flight time. Payload quality can also extend flight duration without sacrificing accuracy and resolution.
3.8.4. Range and Altitude
Drones can be remotely controlled from various distances, known as their range, varying from a few metres in small drones to kilometres in larger drones. Altitude, on the other hand, is the height at which they can fly. A classification of aerial platforms is presented based on the altitude they can reach:
High-Altitude Platforms (HAPs): HAPs, like balloons, are also used for mobile connectivity. These High-Altitude Platforms provide more extensive coverage compared to LAPs. However, they are complex to deploy and are generally used as a means to support internet connectivity.
Low-Altitude Platforms (LAPs): LAPs are frequently deployed to support mobile communication due to their fast deployment and low cost. In addition, these platforms provide line of sight (LoS) routing, which significantly improves communication performance [
33].
Table 4 presents drone categories based on altitude.
3.8.5. Batteries in Drones
Drones are currently used in a variety of applications, such as military operations, power line inspection, disaster prevention, and smart agriculture. These unmanned aerial vehicles carry different payloads, including GPS, infrared cameras, batteries, and sensors. Drones generally use high-energy batteries, such as lithium batteries, which allow a flight time of 20 to 40 min [
35]. However, the limited battery capacity poses critical challenges in terms of range and endurance. Increasing the size of the battery is not feasible, as it increases the weight of the drone.
Several studies have addressed drone battery charging [
36]. Jawad et al. [
37] proposed three strategies to increase flight time: equipping drones with higher-capacity batteries, although this increases their weight; swapping batteries after landing, which is complex; and recharging batteries at the drone’s base station, using either wired or wireless power transfer systems.
4. State of the Art
This section reviews the most promising areas of research where the AI algorithms have made an impact in the development of drone operations.
4.1. Cargo Operations
Despite being related to the same application of cargo, there are a number of heterogeneous scopes, which motivates us to divide them into several parts. A summary of the most significant references can be seen in the
Table 5.
4.1.1. Complexities Associated with Cargo in Drone Transport
When addressing the complexities associated with cargo in drone transportation, it is essential to consider both the specific conditions of the products to be transported and the intrinsic characteristics of said cargo. For instance, the need for rapid delivery for perishable products has motivated studies that focus on bi-objective optimization models. These models seek to minimize the costs associated with distribution, also reducing value losses that could occur during the process [
18].
In parallel, the physical characteristics of the cargo, such as its weight, size, fragility, and handling requirements, play a crucial role in selecting the appropriate type of drone. For example, a heavy load may require a drone with a higher lifting capacity, while a fragile load may need an additional suspension system or protection to prevent damage during transport. There are specialized studies that analyze in detail the behavior of different types of cargo during transportation. These sudies take into account variables such as stability, aerodynamic forces and structural resistance, with some studies focusing specifically on loads that do not exceed 5 kg maximum weight [
38,
39].
These studies also contribute to the design of safe restraint structures and the development of flight strategies that not only minimize the risks associated with cargo transportation, but also ensure the successful and efficient delivery of products. In this sense, detailed understanding of cargo dynamics becomes an integral component to effectively advance the field of drone freight transportation.
4.1.2. Challenges in Cargo Delivery with Drones
Despite notable advances in AI that have enabled the development of advanced algorithms for route planning and autonomous decision making by drones, there are additional challenges that require attention, such as efficient battery management and the consideration of external factors such as adverse weather conditions, airspace regulations, weight restrictions and the optimization of recipient waiting time during the implementation of drone delivery systems [
40].
Various research focuses on developing solutions that address these specific needs. A route planning approach is proposed for collaborative delivery systems with drones, using GA. This approach considers multiple objectives, such as minimizing route length, delivery time and energy consumption, thus addressing key challenges in drone delivery system efficiency. In the field of collaborative vehicle–drone distribution (CVDDN), an efficient hybrid heuristic algorithm based on improved K-means clustering and extended non-dominant sorting GA-II (ENSGA-II) [
41] has been proposed. It addresses complex problems such as vehicle–drone collaboration, site selection, and the distribution of perishable products, using clustering strategies for effective localization and routing optimization.
Furthermore, another RL based approach for route planning and task allocation in collaborative drone delivery systems is presented [
20,
42,
43]. This method uses RL algorithms and Deep Neural Networks (DNN) to optimize task allocation and drone routes, considering factors such as workload, location, and drone capacity. Performance in terms of efficiency and scalability in drone package delivery is demonstrated using the QL algorithm [
66]. In this context, an approach based on GA has been proposed. This approach considers multiple objectives, such as minimizing path length, delivery time and energy consumption, employing an objective decomposition strategy to efficiently address multi-objective optimization [
44].
In the field of drone package delivery from a single truck [
2], the problem arises of determining the route of the truck and the sequence of trips of the drones to meet customer demands efficiently. This methodology includes an extended graph based formulation and an enhanced Benders decomposition method with relaxations. Additionally, in the field of e-commerce and optimizing package delivery by drones, a mixed integer programming model and a GA based on FIFO and rescheduling are proposed [
45]. These algorithms stand out for their efficiency and ability to deal with even large test instances, suggesting their applicability in real-world implementations.
Delivery time and delay in the delivery of packages is a critical problem [
46]. Hybrid block-based edge recombination algorithms (HBERA) are presented and shown to be effective when compared with edge recombination crossover algorithms (ERX), especially in handling multi-objective problems.
There is a wide diversity of approaches to address the specific challenges in drone package delivery, from route planning to resource optimization and the consideration of multiple objectives.
The Markov property thus becomes a fundamental aspect, ensuring that the actions of the drones are aligned with the present state of the delivery environment. The introduction of distributed communication further enhances this principle, allowing agile and adaptive collaboration between drones, demonstrating its effectiveness not only in optimizing package delivery, but also in system efficiency [
67].
4.1.3. Adaptive Models and Transportation Problems
Adaptive mathematical models are one of the most promising applications of AI in this field, allowing a better understanding of the cargo transport structure, translating into greater efficiency and profitability. The importance of adaptive mathematical models lies in their ability to enhance logistical planning and optimization by reducing costs and delivery times while taking into account the specific configuration of each transportation method [
18]. These models are particularly useful when considering factors such as distance, weight, cargo size, weather conditions or any other relevant variables that may impact the transport process. Recent advancements in AI have also enabled the development of sophisticated adaptive mathematical models, which can automatically process vast amounts of data and generate optimized algorithms with remarkable efficiency. You can also analyze patterns in real-time and historical data to improve model predictions and accuracy.
Another major challenge in drone cargo transportation is the coordination of multiple drones working together to transport a cargo. This technique is known as collaborative drone parcel transportation and is used to transport larger loads that a single drone cannot handle. It is also important to take into account the inertia that a load with a high volumetric can cause, and algorithms must be implemented that are capable of compensating for the mobility of the drone network involved in the operation, counteracting this problem, and avoiding losing both the cargo and the drone network that transports it [
47]. To address these challenges, manufacturers are working on the development of more advanced and safer drones by developing ML models that achieve improved coordination and safety. There are several important variables that must be taken into account when which proceeds to the design of some type of AI algorithm based on the calculation of optimal trajectories; these variables are the incidence of wind, weight and volume of the drone, cargo stability, and weather conditions [
47].
When drones are included in urban areas or crowded areas, there is a great risk of causing some damage to external agents in the process of the operation. To mitigate this risk, operations are carried out with protective cages implanted in the drones [
48]. This type of methodology must be supported by AI algorithms capable of correcting the trajectory and identifying obstacles in real time, since when flying with a protective cage it is much more likely to generate some incident time.
4.1.4. Dynamic Delivery Optimization Based on Demand Fluctuations
This system in charge of dynamic delivery optimization based on demand fluctuations uses an advanced neural network architecture to generate organized sequences of delivery locations. Various optimization criteria are taken into account, such as distance traveled, efficiency in the use of vehicles and cost minimization [
49]. The particularity of this model lies in its ability to dynamically adjust to changes or updates in real time, such as adjustments to delivery addresses or modifications to orders.
This dynamic capability ensures exceptional flexibility and agile response to situations involving constant fluctuations in demand. This adaptability allows the system to maintain optimal performance even in logistics environments characterized by sudden changes and frequent adjustments. In this way, significant advantages are generated, providing a robust and efficient solution in scenarios where demand is variable and dynamic.
4.1.5. Cost Function Focused on Distance and Waiting Time
The cost function-based algorithm is one of the most common approaches to optimize drone package delivery using search algorithms based on a combined cost function. This cost function takes into account both the distance cost, to minimize the total distance traveled by the drones and the waiting cost, to reduce the waiting time for deliveries. Complementing the cost function optimization, a distributed routing algorithm can be proposed, making the drones work collaboratively to deliver the package to the target locations. The algorithm optimizes the assignment of tasks and routes, taking into account the location of the packages and the individual capabilities of the drones [
50].
4.1.6. Organizational Management of Several Drones
One of the main challenges is to programme and manage multiple drones to optimize the efficiency of cargo deliveries. When working with a fleet of drones, it is essential to coordinate and synchronize their operations. This involves designing intelligent algorithms and scheduling systems that assign the appropriate tasks to each drone, taking into account factors such as payload capacity, flight range, and availability.
Additionally, managing multiple drones involves monitoring and controlling their performance in real time [
51]. It is necessary to monitor the location of each drone, the state of charge of its battery, its health and any anomalies that may arise during the flight. To do this, telemetry systems and sensors can be used on drones, which send information in real time to a control center and guarantee stability in connectivity [
52]. This allows quick and effective decisions to be made to ensure delivery success. It is also necessary to have an effective and latency free authentication system to be able to identify all the drones that participate in that operation [
53,
68,
69] and to be able to keep them located as best as possible within predefined location methodologies to avoid all types of conflicts during maneuvers in the that airspace can be shared [
70,
71].
4.1.7. Collaborative Routing and Distributed Cargo
A significant development in the logistics field is the adoption of a collaborative approach in the route design and equitable distribution of cargo. These components are essential to maximize efficiency in delivery processes.
This collaborative routing and distributed cargo approach involves the use of multiple drones operating in a coordinated manner to deliver cargo efficiently and quickly. Collaboration between drones allows delivery routes to be optimized, reducing times and maximizing the efficiency of the system as a whole [
54,
55,
72].
To complement this strategy, distributed charging systems are implemented. These systems ensure that drones have enough power to complete their missions, through charging stations strategically located along delivery routes. In this way, the drones can charge their batteries, maintaining their autonomy throughout the delivery process.
Research into this transportation paradigm focuses on route planning and optimization algorithms, taking into account variables such as distance, air traffic, the location of delivery destinations, and the characteristics of the transported cargo. These types of decisions can be made using DL with graphs, which can assist in real-time decision making [
73,
74]. Additionally, charging planning algorithms are used to determine the optimal location of charging stations along routes [
3].
The effectiveness of this methodology is evaluated through extensive simulations, comparing the results with existing approaches. Collaborative routing and distributed charging are observed to achieve faster and more efficient deliveries compared to more traditional approaches.
The study and design of this type of methodology must take into account some fundamental aspects such as route planning, coordination between drones and shared load management. These coordination principles play a fundamental role in ensuring that drones operate harmoniously and efficiently, avoiding collisions and optimizing payload distribution [
75].
Another approach used is the leader/tracker paradigm, where one drone acts as a leader and the others as trackers. This paradigm has been combined in some studies with cooperative transport with a load suspended by cables [
4,
56,
76,
77,
78].
The importance of considering possible delays in decision making due to the network is highlighted. Some studies anticipate this phenomenon and analyze how it would affect the behavior of the drone network in such circumstances [
57,
79].
Simulations in virtual environments are essential to evaluate collaborative routing and distributed cargo without risking the integrity of the drones or the environment. Compared to traditional delivery approaches, it has been shown to significantly improve transportation efficiency, reducing delivery times, optimizing the use of resources, and minimizing the number of trips made.
4.1.8. Last Mile Delivery
Optimizing the generation of itineraries in the parcel delivery paradigm with several drones transported by a truck poses challenges that require advanced approaches to achieve the efficient distribution of packages [
5,
6,
58]. This approach is characterized by the use of a long-range means of transportation, such as a truck, which acts as a central base for collecting packages and an approach point to delivery areas. Meanwhile, drones are responsible for making deliveries to specific locations nearby.
A recent study addresses the optimization of a last mile delivery system that combines vans and drones [
6]. The research highlights the combination of three transportation methods: vans, drones, and trucks. The drones and vans are responsible for distribution services, while the trucks are responsible for transporting the merchandise and the drones to the stations. A discrete optimization model and a two-phase heuristic algorithm are presented to optimize the total delivery cost, including the transportation costs of the vans and the delivery cost of the drone. The results indicate significant cost savings by combining traditional delivery modes with the use of drones and drone stations. Another of the most promising studies in this field presents an innovative hybrid delivery methodology, leveraging the combined use of drones and trucks. This approach focuses on optimally guiding drone missions through a receding horizon linear quadratic regulator (LQR), effectively managing takeoff, free flight, pickup, delivery, and dynamic landing on a moving vehicle. Simulation results of the truck–drone delivery architecture are presented and discussed in detail, proving the effectiveness of the proposed method [
59,
60].
Other research addresses same-day delivery with vehicles and drones [
5]. A Deep Q-Learning (DQN) approach is proposed to assign clients to vehicles or drones dynamically. The method learns the value of assigning a new client to vehicles or drones and demonstrates its superiority compared to baseline policies. This approach uses different vehicle fleets based on capacity and speed, leveraging their strengths to optimize same day delivery.
On the other hand, a last-mile delivery system with electric vehicles (EV) and drones is being studied, where battery-swapping vehicles (BSV) offer a mobile battery exchange service for EVs. A mixed-integer programming model (PIM) is formulated and a large neighborhood search algorithm based on QL (LNS-QL) is designed [
58]. This approach seeks to minimize the total cost considering energy consumption, driver salaries, and obsolescence costs. The results of the experiments verify the effectiveness of the model in small-, medium-, and large-scale instances, demonstrating the viability of the cooperative delivery system of EV and drones.
These studies reflect the diversity of approaches to address the challenges in generating itineraries for package delivery with drones and other vehicles applied to the last-mile delivery paradigm, highlighting the importance of considering diverse fleets, energy efficiency, and DL to optimize package distribution.
4.1.9. Delivery in Urban and Catastrophic Areas
Delivery of cargos in urban areas assisted by drones provides speed, agility, traffic decongestion, and greater flexibility due to the ability to access difficult or traffic restricted areas; as a consequence, packages can reach destinations that would otherwise be complicated for traditional delivery services.
In order to achieve an effective and controlled delivery with drones within urban areas, various methodologies supported by AI algorithms are proposed.
One of the most widespread paradigms consists of transporting a fleet of drones by trucks to the urban areas of cities. From this point, the aircraft are launched with the respective packages for delivery [
1,
6]. Once the delivery is complete, each drone will return to the truck to pick up the next package [
2,
61]. In order to optimize parcel collection and distribution points on roads, the development of AI algorithms is proposed with the charge of choosing these optimal points [
62,
63].
With the aim of streamlining the order/delivery system, approaches are proposed where, when placing an order, the optimal route is immediately planned and the task is assigned to one of the available drones. Not all orders can be managed using this method, as there are operational limitations on the part of drones. Therefore, it is necessary to implement a system that identifies the viability of delivering through this route. To address this challenge, numerous studies use algorithms such as QL, K-means or GA to carry out the feasibility analysis [
5,
80], achieving the most efficient distribution possible [
18,
81].
Due to the nature of operations delivery in urban zones, the drones used must be able to modify their structure. Thanks to this morphological flexibility, they are able to adapt to various types of cargo and the environment [
40]. As a novelty, the creation of an auction model is presented in which available deliveries are published and the drones postulate these depending on the characteristics of the distribution [
82]. Some studies, due to their combinatorial complexity, are only proposed at a theoretical level [
82]. Also, an analysis of transportation networks must be carried out, due to the high demand for the use of drones for this type of operations, and algorithms can be applied to predict demand in specific geographic areas in order to carry out delivery planning much more efficient [
83,
84,
85].
In catastrophic areas and emergency situations, quick and efficient access to medical supplies and services can mean the difference between life and death. In this context, drones have emerged as a highly important tool for the delivery of life support in disaster-affected areas. These aircraft not only provide medical aid and essential supplies, but can also carry out search and rescue tasks, making it easier to locate trapped or endangered people. Another of the most significant features is the ability to transmit information in real time to emergency teams, providing an aerial view of the situation and helping in strategic decision making. The combination of drones with AI can further enhance the efficiency and effectiveness in this type of operations. Planning optimal trajectories is one of the main applications of AI algorithms in this type of circumstances, maximizing the speed and safety of life-support deliveries, avoiding obstacles (one of the most used techniques for obstacle avoidance is RL) [
43,
86,
87,
88], and guaranteeing the delivery of supplies efficiently and fairly [
18,
84].
The identification and recognition of individuals, real time analysis of medical data, and logistics and resource management in environments affected by limitations are other complementary examples in which the technological fusion between drones and AI algorithms is present. In addition, simulations are presented in environments with diverse characteristics with the purpose of understanding the behavior of drones in different cases, being able to determine the optimal conditions for operation.
Furthermore, in three-dimensional rescue mission environments, a mission assignment method based on adaptive GA and trajectory planning with sine–cosine particle swarm optimization (SCPSO) has been proposed [
45]. This method addresses challenges such as 3D terrain modeling, common threats, and drone performance considerations.
In the domain of secure communication networks, Markov optimization emerges as a crucial technique. Outside the logistics domain, this methodology is presented as a tool to address the challenges of communication security in Internet-assisted drone networks in urban environments [
64], reducing communication issues during emergency situations, such as earthquakes or landslides [
65].
4.2. Agricultural Operations
The union of AI with drones has completely transformed the way we grow and harvest food, taking agriculture to new points of efficiency and sustainability. Drones have revolutionized agriculture, offering farmers an aerial view of their land. This perspective has allowed the detailed monitoring of fields, making the early detection of problems and data-based decision making easier [
89]. The ability of drones to cover large areas of land with speed and precision has changed the dynamics of modern agriculture.
Convolutional neural networks (CNN) equipped on drones have proven effective in the early identification of plant diseases [
90,
91]. By analyzing detailed images, these networks can discern specific patterns, allowing farmers to take preventive measures before the problem spreads, thereby improving the overall health of crops. By combining RL algorithms and neural networks, the most effective routes for precise spraying can be determined [
92,
93]. This combination of constant monitoring and optimized spraying improves both the quality and quantity of crops.
Pollination is vital for food production, and drones have taken on a crucial role even in this process. Using AI systems, they can classify images to identify unpollinated flowers and, if necessary, carry out artificial pollination [
10]. This capacity guarantees the reproduction of plants and crops, contributing significantly to global food security.
On the other hand, the detection of flooding and weeds has been observed and controlled [
11]. Using algorithms such as eXtreme Gradient Boosting (XGB) [
94,
95], SVM [
14,
96], RF [
16,
97] and KNN [
15,
98], drones can identify flood-prone areas and precisely eradicate weeds [
99,
100], ensuring resilient and healthy agricultural production. These algorithms continually learn and adapt to changing soil conditions and crop needs, ensuring constant improvement in the operations for which they have been designed. A summary of the most significant references can be found in
Table 6.
4.3. Drone Identification and Detection
The proliferation of drones has generated great expectations due to their ability to be applied in various areas, but on the contrary, it generates concern regarding their misuse and the potential threat they pose [
101] due to their invasive nature. There is a proliferation of studies in the field of detection and monitoring, carrying out comparisons between methods based on Linear Kalman Filters (LKF) and Non-Linear Polynomial Regression (NPR) [
101]. In addition, techniques based on AI are explored for detection and recognition [
101].
One of the most innovative aspects regarding drone detection involves the use of skinny patterns and iterative neighborhood component analysis (INCA) [
102]. This classification model uses techniques such as decision tree (DT), discriminant (D), SVM, KNN and ensemble classifiers (EC), achieving a classification accuracy of 99.72% [
102]. In another context, a game theory based on the Apolonio circle and QL for cooperative drone hunting (ACGQ-CH) is proposed [
103]. This method uses strategies based on the tracker/evader paradigm, guiding trackers to achieve effective cooperative hunting [
103].
The ability to identify and detect drones in real time is crucial to maintaining security, which is why drone detection and tracking systems are designed in real time, combining multiple DL [
104,
105] and computer vision techniques [
106]. These systems use the Yolo-v4 model to detect drones and generate visual models for their tracking [
106]. On the other hand, end-to-end models are developed for the detection and classification of different drones using YOLOv2 as an object detection model [
107].
The use of multiscale time frequency convolutional neural networks for the detection and identification of drones based on radio frequency signals [
108] is presented as one of the most novel and promising approaches, surpassing existing methods in the detection and identification of drones by radio frequency using DNN [
108]. Additionally, the use of DRL is explored to counter drones in a 3D space using another drone [
109]. This method uses the DQN algorithm combining imitation learning and RL to hunt down target drones [
109].
Due to the malicious use of drones, physical security and privacy are also of concern. The autonomous detection and identification of drones have become essential to address this type of problem. The use of the acoustic characteristics of drones and advanced deep learning techniques is presented as one of the most innovative and promising techniques to solve this problem [
110]. The introduction an acoustic dataset hybrids of drones, which includes audio recordings from real drones and artificially generated audio samples, has been instrumental in improving the detection and identification of this type of aircraft [
110]. Additionally, applying Generative Adversarial Networks (GANs) to generate drone audio snippets has proven beneficial in detecting new and unknown drones, thereby improving physical infrastructure security and privacy [
110]. A summary of the most significant references can be found in
Table 7.
4.4. Detection, Analysis and Inventory
In ecology, the complexity of subtropical mountain forests has challenged scientists for years. Thanks to high-resolution detection images captured by drones, the diversity of tree species and their status can be accurately mapped. This approach has achieved an accuracy of 83% using four object based classification algorithms (KNN, Classification and Regression Tree (CART), SVM, and RF) [
111].
In marine environments, seagrasses play a vital role in coastal conservation. Using high-resolution imagery from unmanned aerial systems, several ML algorithms have been evaluated for object-based classification of submerged seagrasses. The Bayes classifier excelled with 94% accuracy under favorable environmental conditions [
112].
Exploring the application of drones in forest fire detection, the combination of DL object recognition with drones equipped with specific sensors is investigated. Their analysis highlights the effectiveness of fully equipped drones for real time monitoring and early fire detection, using models such as YOLO and R-CNN [
113].
DL approaches to wildfire classification, detection, and segmentation outperform traditional methods and provides a detailed analysis of the data sets and challenges present in current research [
114].
In the field of road safety, a computer vision-based method is proposed to detect pavement markings in school zones using high resolution aerial imagery. Their method, based on techniques such as DL or ML with an accuracy of 94%, highlights how drone technology can improve the collection of critical data for road planning and safety [
115].
RL algorithms have significantly improved trajectory planning, ensuring the flight safety of drones in complex tasks, such as detecting aquaculture cages scattered at sea. Thanks to this trajectory planning methodology, drones can save energy while completing complex tasks and return to the ground base safely [
87].
In the field of aerial surveillance, the optimization of quadcopter performance is explored through the integration of helium gas. Likewise, drones are used for object detection by using the Tensor Flow object detection API. This strategy not only provides advanced solutions for drone based surveillance, but also strategically highlights the impact of helium on critical factors such as flight time, battery consumption, and maneuverability [
116]. Methods are presented for the automatic monitoring of garbage on beaches through the use of drones and object detection based on YOLOv5, demonstrates the feasibility of automation in the identification and geolocation of trash objects in drone images, providing key elements for an automated surveillance and recovery system [
117].
Focusing on inspection using AI and unmanned aerial vehicles (UAV), an innovative object detection system is presented that uses RGB images from drones to detect and georeference traffic signs, improving inventories in civil infrastructures. The methodology includes the creation of a data set, model training (Faster R-CNN) and testing. Despite challenges such as the lack of labeled data, the computer vision component achieves accurate traffic sign detection [
12]. This type of identification and counting methodology is also used for inventories of spruce seedlings [
13]. As a complementary study, the integration of drones in railway diagnostics is presented as a significant advance towards the automation and optimization of track inspection, demonstrating a notable improvement in the speed and efficiency of operations [
118].
In the field of infrastructure inspection and maintenance, automated optical inspection of the Fast Aperture Spherical Telescope (FAST) has become more efficient thanks to drone technology and DL techniques. This application guarantees the stable operation of the FAST, providing a reliable and effective solution for maintenance tasks [
119]. On the other hand, the Keras-RetinaNet model with ResNet 50 is used for object detection, achieving an accuracy of 77.99%. This innovative approach highlights the potential of neural networks in improving object detection in aerial environments [
8].
Additionally, civil infrastructure assessment has been improved through DL deployed on drones. These innovative systems have been applied in the automated evaluation of cracks in high-rise bridge pillars, improving the safety of civil structures. This combination of technologies has allowed a detailed and accurate evaluation, ensuring the integrity of critical infrastructures [
9].
In recent years, the use of drones and robotics has expanded into many commercial uses, including the construction industry. Drone powered automation has a huge impact on improving productivity, reducing costs and schedule delays. The use of drones, along with the application of the IoT and robotics, can have a significant impact on the supply chain and improve inventory accuracy, leading to faster and more profitable construction projects. Optimization models are proposed for supply chain management through the accelerated use of drones and AI in the post-pandemic era. Cutting-edge drone technology can perform rapid inspections to make inventory control more economical and efficient. While certainly not suitable for every building surveillance task, drones have many advantages for investigating buildings for leaks, conducting aerial surveys and addressing security issues more cost-effectively than manual procedures, leading to an improvement in communication and collaboration between different stakeholders [
120].
As an innovative system in the field of object detection, a real-time system based on the DL model known as YOLO (you only look once) is implemented. This detector allows the relative position of each drone in the platoon to be continuously estimated. Each drone is controlled using a PD proportional derivative (PD) feedback system specifically designed for platooning [
121]. A summary of the most significant references can be found in
Table 8.
4.5. Flight Control and Safety
Fundamental aspects of UAV flight research are visual navigation, flight control, safety, and route planning.
In terms of visual navigation, optical flow algorithms are used in combination with supervised learning techniques (KNN, SVM) to calculate flight speed and improve identification of its motion state [
122]. In addition, RL methods are explored that combine the artificial potential field algorithm with DQN to avoid obstacles during flight, allowing safer and more efficient navigation of drones [
123].
In the aspect of security, countermeasure systems have been developed using RL for Combat Unmanned Aerial Systems (C-UAS) [
124]. These systems employ spoofing and beaconing algorithms to neutralize GNSS receivers of invading drones, guiding them toward safe kill zones (SZ). This technique has proven to be effective in identifying and reducing unauthorized drone flights, thereby improving safety in various scenarios.
Intrusion detection algorithms based on QL (Q-TCID) are proposed to improve the accuracy in the detection of malicious attacks on Internet of Drones (IoD) systems [
125]. This methodology employs an intelligent dynamic voting algorithm and QL optimization strategies to significantly reduce the probability of false positives and negatives in intrusion detection, thereby improving security in environments where drone and IoT integration is crucial.
Route planning and obstacle avoidance are also areas of intense research. Some works have used RL based on the QL algorithm to improve the efficiency of trajectory planning, especially in complex environments such as three-dimensional ocean space [
87]. These approaches have allowed drones to perform optimal trajectories and avoid collisions more effectively, even in the presence of unforeseen obstacles.
Trajectory planning and flight control research is carried out with the purpose of improving network performance in Drone Base Station applications. It is observed that solutions obtained by QL and DQN achieve an optimized trajectory and consequently, an improvement in the performance of the network, adapting its positioning and mobility according to the movements of the users [
126].
For maritime reconnaissance, adaptive route planning for maritime drones has been a constant challenge. Conventional path planning methods have focused on the mesh routing environment, which is often unsatisfactory in a continuous maritime space. To address this problem, an innovative QL enhanced method for maritime drone trajectory planning on the ocean surface is presented [
127]. The proposed approach discretizes the flight environment of maritime drones into a state space represented by several variables, which significantly helps in reducing the complexity of the problem. During the training process, a state aware guided learning strategy is implemented to accelerate the convergence of the algorithm.
In addition, DRL methods have been developed to perform autonomous front view shooting [
128] in the cinematographic field, allowing drones to capture complex dynamic scenes without human intervention.
By employing a combination of RL and a PID controller, dynamic and robust control is achieved. The training process involves applying the QL algorithm in a simulated environment, followed by real-world testing to validate the effectiveness of the model. As a practical application, a drone is presented navigating through a three dimensional environment full of obstacles, demonstrating the versatility of this novel control methodology in real world situations [
129].
In the context of the integration of drones with the IoT, solutions are proposed that combine DRL and graph search methods for three-dimensional path planning in complex environments [
130]. These approaches have enabled drones to make autonomous decisions with the same flexibility as human operators, thus improving efficiency and adaptability in various industrial applications. A summary of the most significant references can be found in
Table 9.
4.6. Hotspots Habilitation
The realization of communication hotspots with drones has emerged as an innovative solution to improve connectivity and provide services to mobile users. By employing drone-mounted base stations, we seek to overcome ground infrastructure challenges and maximize mobility to deliver efficient and improved connections in specific areas.
In a scenario where drone-mounted base stations freely navigate over a macrohotspot to serve mobile users on the ground, a mobility control algorithm is proposed that significantly improves packet throughput [
131]. The constant movement of drones reduces the distance between base stations and users, improving the probability of line-of-sight connection. Simulations demonstrate an 82% increase in average packet throughput and a striking 430% increase in 5th percentile packet throughput compared to a reference scenario where drones hover over fixed locations.
UAV-mounted base stations (UAV-BS) [
132], also known as drone base stations, have the potential to overcome the limitations of ground-based base stations. These stations can provide cost-effective Internet connectivity to users outside the infrastructure and act quickly in the event of unexpected ground station failures. To optimize UAV-BS mobility and maximize network performance, an advanced DRL-based solution with a continuous actor–critic approach, supported by AI technologies, is proposed. Simulation results reveal significant improvements compared to QL, DQN, and conventional algorithms, achieving a total data rate of up to 45 Mbps and reducing convergence time by 85% compared to traditional methods, clearly demonstrating the effectiveness and efficiency of the proposed DRL-based solution and the application of AI techniques. The adaptability and continuous learning capability of the DRL and AI-based solution opens new perspectives for the evolution of autonomous and advanced systems in the field of mobility and connectivity. A summary of the most significant references can be found in
Table 10.
4.7. Sustainability and Energy Management
One of the main problems that present a challenge today is energy efficiency management. Energy is essential for all operations carried out by a drone, from takeoff to flight and landing. This energy efficiency depends on several factors, such as battery capacity, motor efficiency, or the overall design of the aircraft.
More and more manufacturers are focusing on the design of aircraft capable of much more efficient energy management [
133]. To achieve this goal, AI algorithms are used to manage energy in drones. These algorithms must be adaptive and must have the capacity to make decisions in real time, since the aspects that influence the energy consumption of drones are not only due to internal factors but also due to external factors such as inclement weather.
These models can optimize the use of energy throughout the flight process. One of the most significant uses is the use of algorithms in charge of planning the most efficient routes whose objective is to minimize energy consumption by avoiding longer routes or with a number of obstacles that make the operation unfeasible. On the other hand, these algorithms must also be able to modify parameters such as flight speed and altitude that can have a negative impact in terms of energy efficiency.
One of the critical aspects in the energy management of drones is the payload. This must be managed appropriately to be able to carry out efficient energy optimization [
88]. It is very important to implement AI algorithms focused on maximizing energy efficiency through energy management. payload. They must also contribute to the weight distribution design to minimize the resistance that the environment provides to the aircraft. Not only does energy efficiency have to be studied at the time the aircraft is in flight, it is also very important to observe in takeoff or landing, since they are the critical points during which the most energy is consumed. Therefore, AI algorithms whose purpose is to achieve maximum efficiency in takeoff and landing have been designed [
134]. A summary of the most significant references can be found in
Table 11.
5. Discussion
The synergy between AI and drones is emerging as a dynamic and promising field of innovation. Drones that were originally designed for unmanned aerial operations, have undergone a significant transformation thanks to the integration of AI algorithms. The growing availability of onboard computing power and the constant improvement of AI algorithms allows the design of tasks capable of adapting to changing environments, enabling drones to make complex decisions in real time.
Security, both in visual navigation and environmental control, emerges as a significant application. The ability to avoid obstacles and to perform terrain recognition in real time has become a priority, together with the consideration of software attacks that may compromise safe drone operations. The identification of drones, especially those that are not catalogued, is acknowledged as a critical challenge. Although systems based on sound waves and radio frequency have proven effective with known drone models, uncertainty arises when it comes to new models. Overcoming identification issues requires AI developments that allow systems to learn quickly and accurately as they encounter new signals and drone models.
Another fundamental aspect of security is cargo management, with concerns ranging from onboard resource limitations to personal and material security. This challenge, although largely negative, highlights the need for continued innovation in drone design and payload management, because, in this application, drones are the main limiting factor. Due to drone resource limitation (i.e., battery, payload capacity, energy consumption, weather adversities, data storage limit, connectivity, and response time), AI algorithms promise the ability to analyze and process data in real time, allowing drones to make informed decisions about how best to use their limited resources. For example, ML algorithms can predict energy consumption patterns and optimize flight paths to maximize range. Furthermore, the ability of AI to adapt to changes in environmental conditions or assigned tasks contributes to a more effective optimization of available resources, maximizing the usefulness of these aircraft in various applications.
Innovative and promising collaborative delivery and distribution paradigms face technical challenges like fleet coordination, obstacle avoidance in circumstances in which the cargo is transported by several drones, integration with urban infrastructure, integration with air and ground regulation standards, and connective security due to an interconnection is required between the aircraft that affect the operation. Also, last-mile delivery establishes itself as a key strategy in logistics operations, allowing products to be brought directly to the final destination. This approach is not without challenges that must be addressed in order to guarantee the efficiency and effectiveness of this type of operations such as urban congestion, high operational costs, energy efficiency, package security, fleet location and integration systems, environmental impact, limitations in the autonomy of drones, restricting regulations, etc.
Drone operations have significantly impacted agriculture, taking advantage of the versatility of these aircraft and the power of AI algorithms for visual recognition. This combination has improved the quality of crops by allowing the identification of affected areas, whether due to infestations, low fertility, risk of fire, or need for fumigation. In addition, drones themselves can carry out fumigation tasks, highlighting their ability to perform specific operations efficiently in agricultural environments.
The AI technological paradigm addresses a multitude of uses, all seeming to be relevant, interesting and beneficial. Regarding sustainability and energy efficiency, there is a need to create more efficient and lighter batteries, as well as the exploration of alternative energy sources, achieving a lower environmental impact. To address these challenges effectively, it is essential to harness the potential of AI algorithms. On the other hand, in terms of regulatory activity, there is an ethical and legal gap in the massive collection of data, very relevant for AI paradigms. Preserving privacy and the risks of autonomous decision making raise questions about the responsibility and regulation of operations, requiring clarifying and robust standards that guarantee trust and coexistence of the various drone platforms and their operations.
In this context, the introduction of AI presents itself as a potential solution to address some of these challenges. The ability of AI to optimize fleet coordination, improve energy efficiency, and ensure safe operations could make the difference in the successful implementation of this paradigm. Even though it is a novel paradigm that offers many benefits, it must also be implemented with caution, since it can cause unexpected problems. DL has emerged as a key enabling technology for drone-based functional uses (
Figure 8).
6. Conclusions
The integration of AI technologies with UAV systems enables the creation of advanced and efficient solutions for a wide range of technical applications. The background review in this paper provides a contextualization of the theoretical foundations and main classifications of IA, allowing a deeper understanding of how the technology has reached its current state.
This analysis has not only provided an in-depth overview of the algorithms, but also highlights innovative applications, thus offering a comprehensive view of the technological cutting edge in this dynamic field. Among the novel applications identified, advanced solutions stand out for the optimization of trajectories, detection and recognition of objects in real time, assistance in agricultural operations (crop monitoring, pesticide application, and efficient resource management), as well as the development of autonomous navigation systems.
In the field of transportation, the emerging application of drones in collaborative transportation stands out, allowing the efficient delivery of products and services. This collaborative approach extends to last-mile delivery, where drones play a crucial role in the logistics chain, shortening distances and optimizing the delivery of goods to final destinations. Furthermore, these pioneering applications not only enrich our current understanding of the capabilities of AI in drones, but also outline essential directions for future research. This technological evolution reflects the growing diversity of uses that these devices can have in different sectors, promoting efficiency and transforming the way we approach various operations.
The future outlook for this technology is highly promising, although it faces some significant obstacles. The design of efficient and sustainable batteries stands as a fundamental challenge, since it constitutes a pillar for the advancement of operations related to AI algorithms and drones. On the other hand, but no less important, ethical, regulatory, and privacy aspects are crucial to help establish defined standards in this technical field.
If these essential aspects can be successfully addressed, the future of this technology looks extremely interesting, both in the logistics field and in the transformation of employment. Resolving the challenges raised will not only open new possibilities in terms of efficiency and applications, but will also contribute to forging a solid framework. Consequently, an exciting and transformative future is foreseen for the integration of AI and drones in both society and industry.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}