
Performance Estimation of Fixed-Wing UAV Propulsion Systems
 , , , , and
, , , , and
Abstract
:1. Introduction
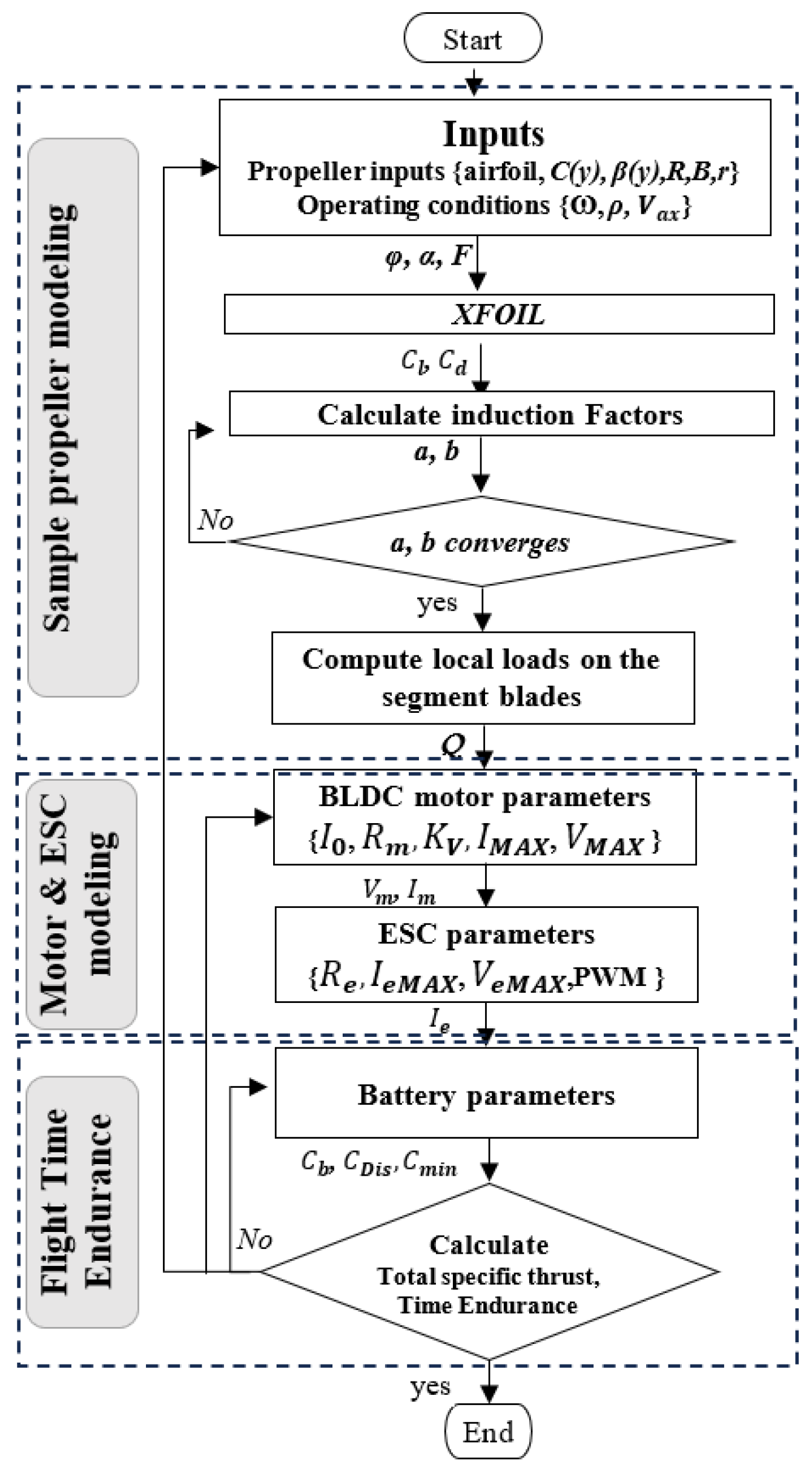
2. Overall Process
3. UAV Propulsion System
3.1. Propeller Modeling
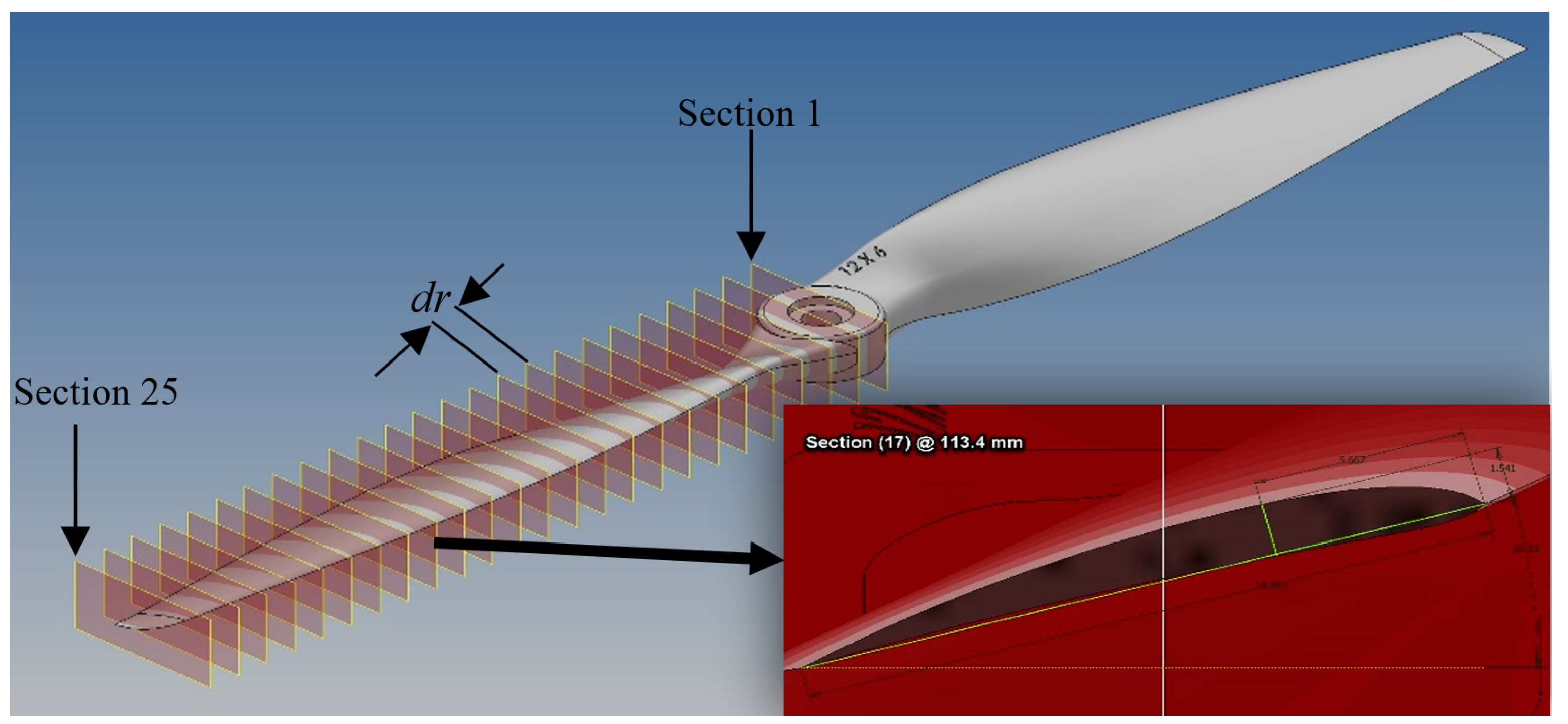
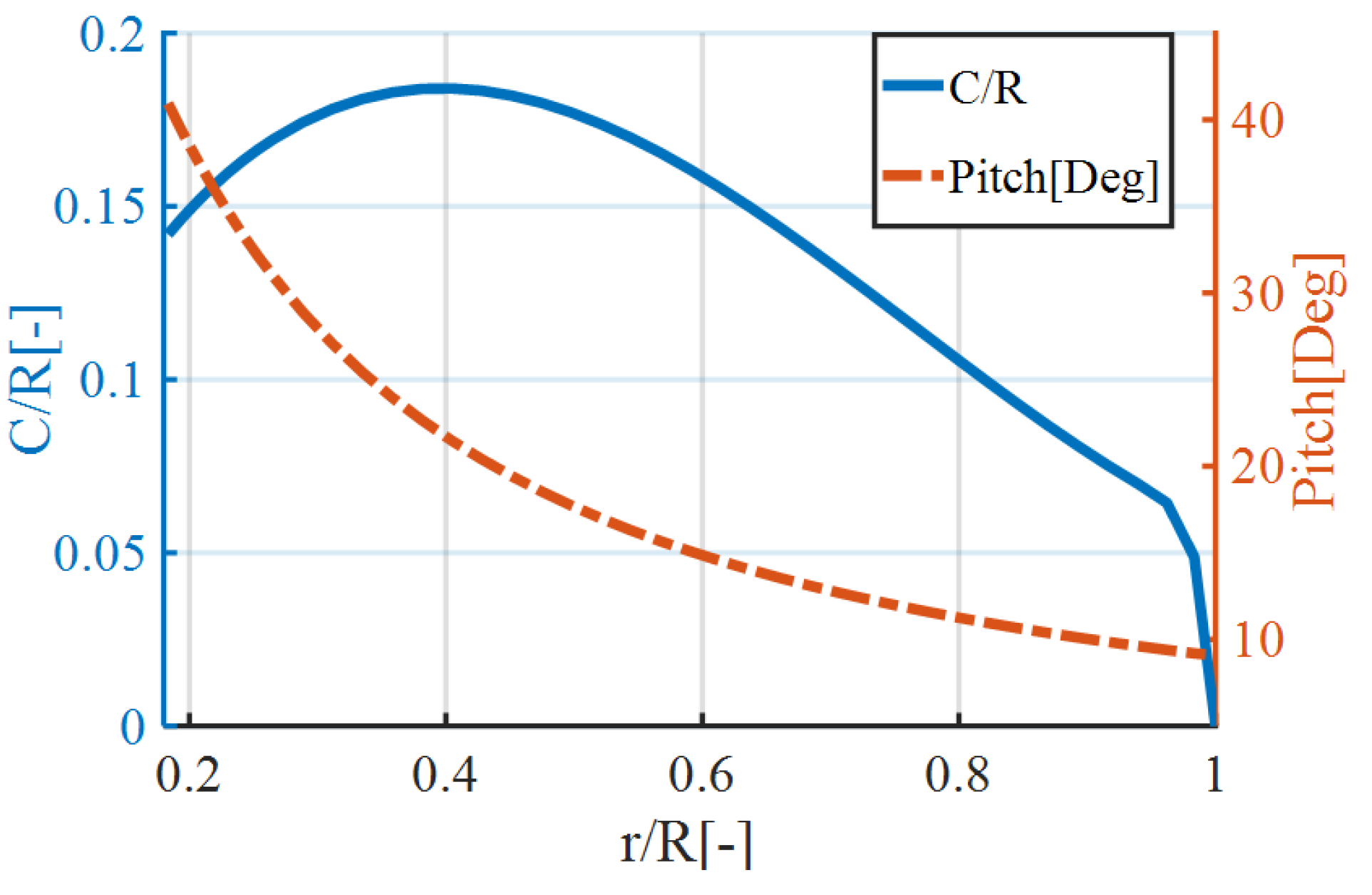
3.1.1. The Propeller Geometrical Data
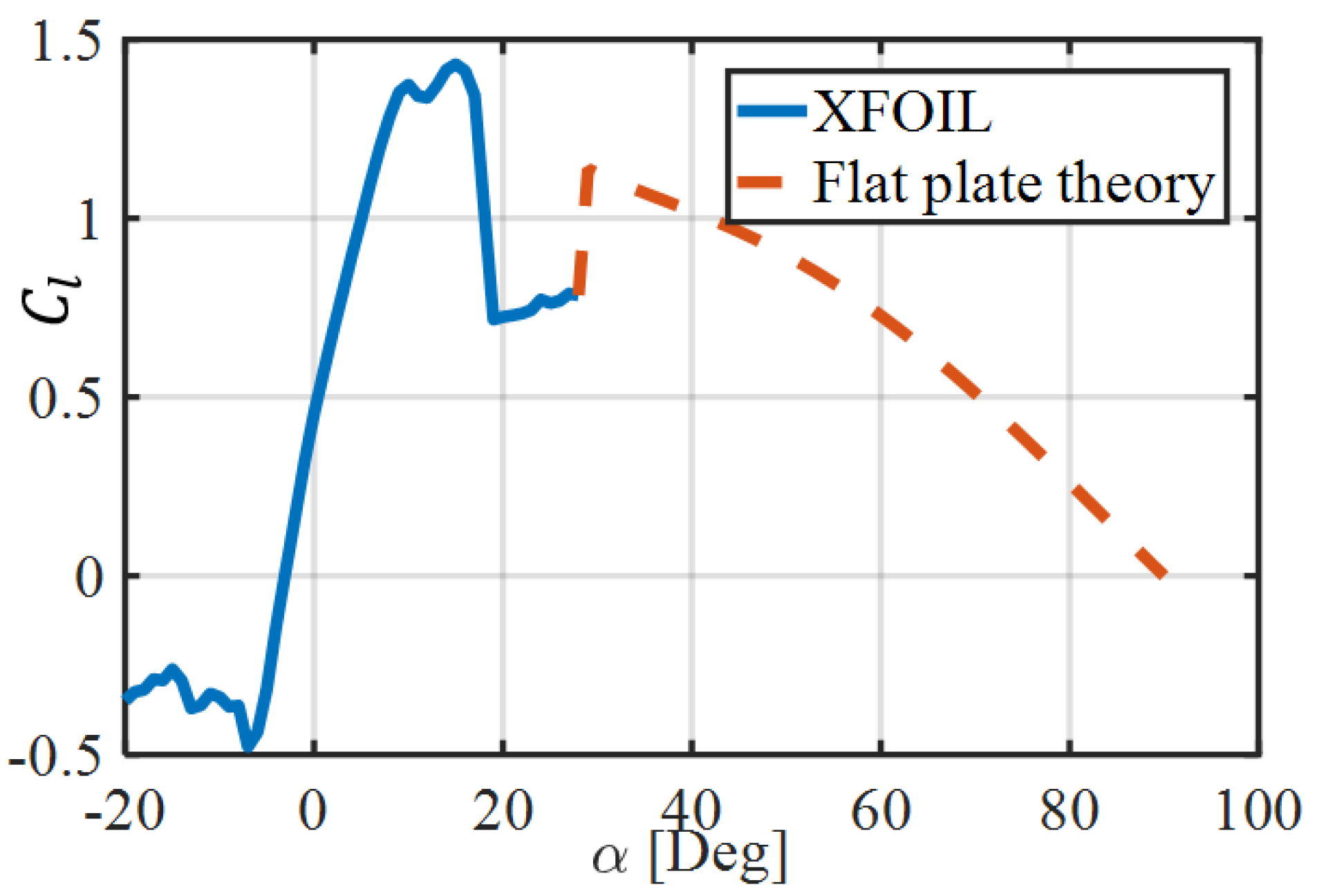
3.1.2. Propeller Aerodynamic Coefficients
3.1.3. Blade Element Momentum Theory (BEMT)
3.2. BLDC Motor Modeling
3.3. Modeling of the Electronic Speed Controller
3.4. Battery Modeling
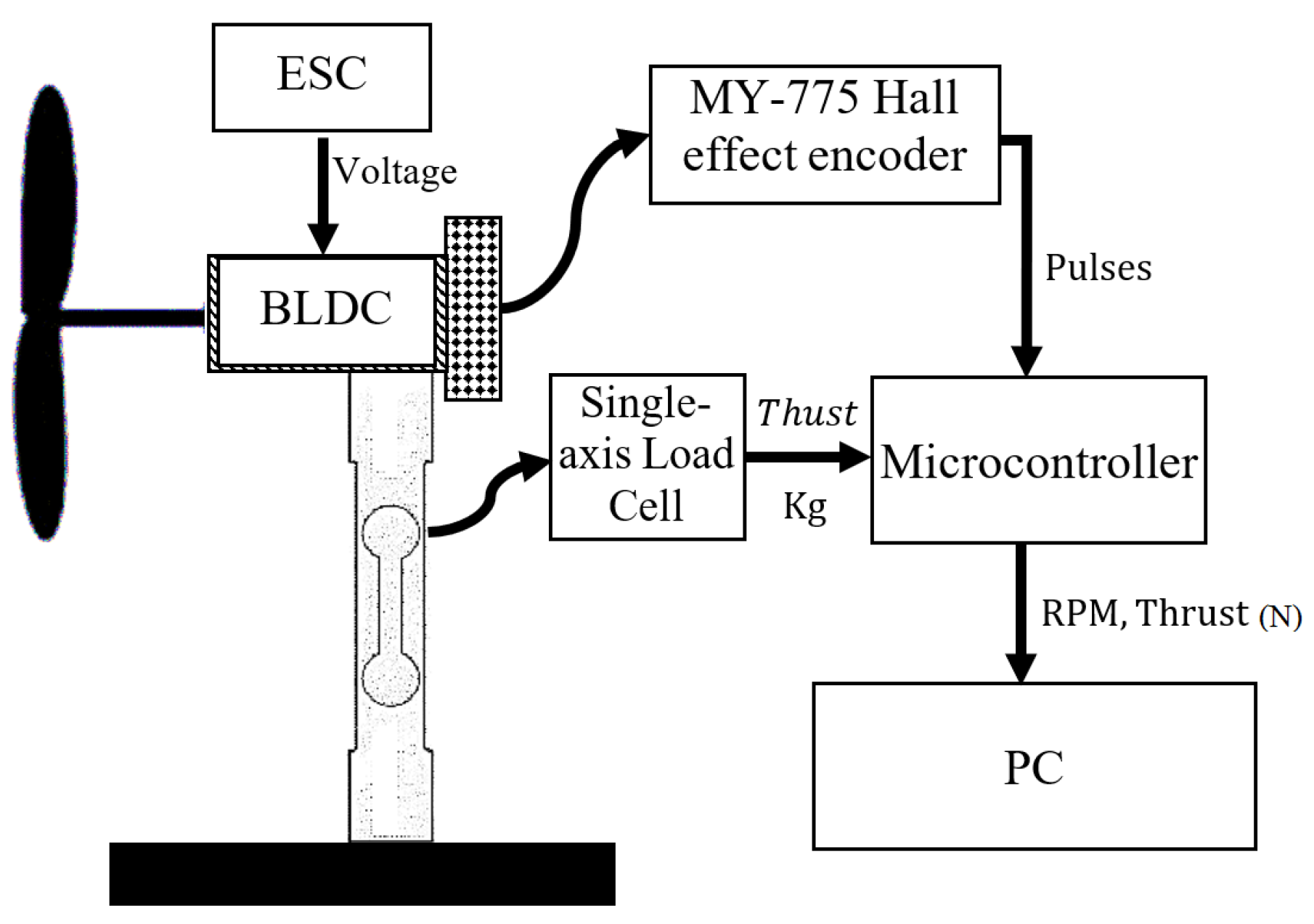
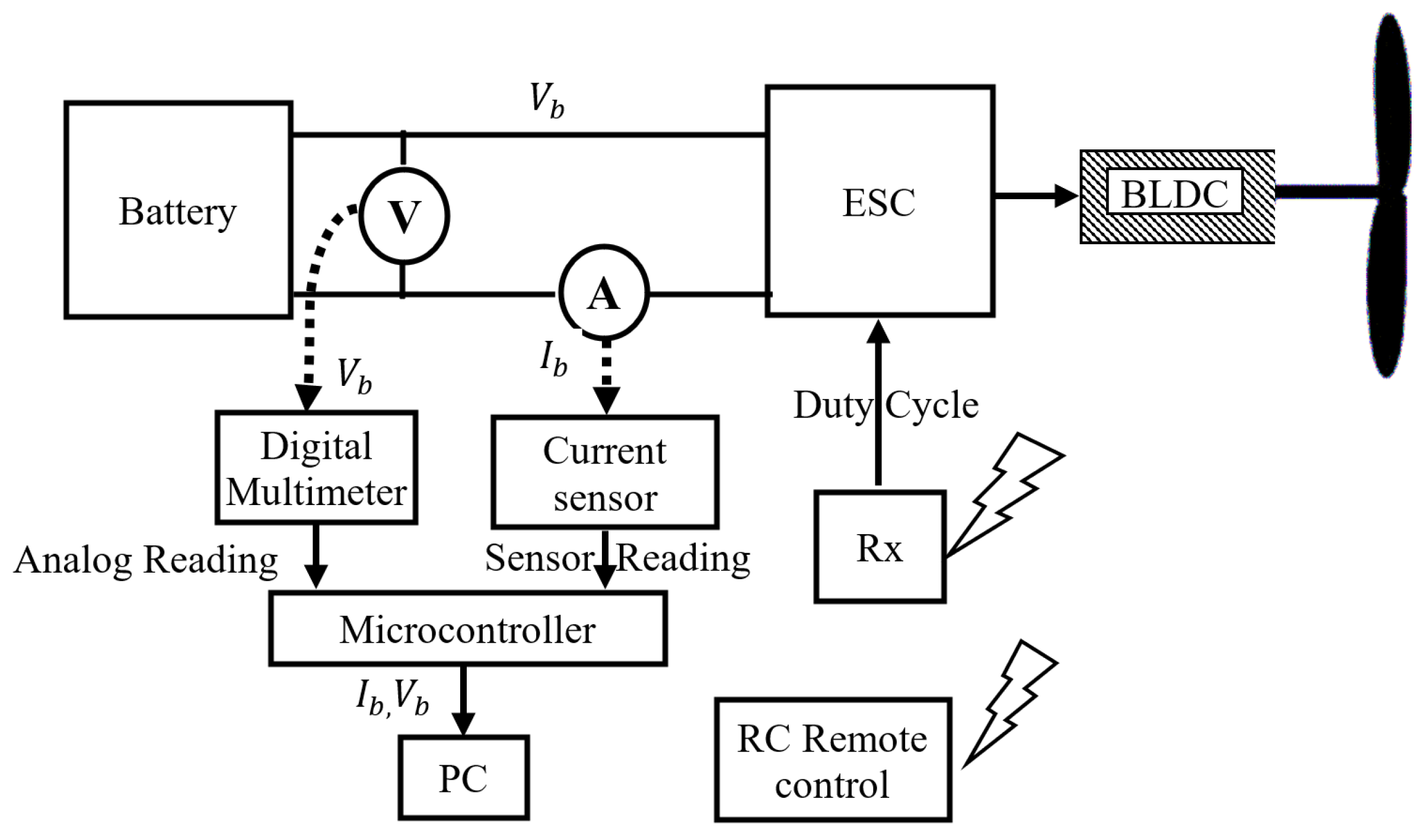
4. Experimental Setup
4.1. Thrust Measurement
4.2. Propeller Rotation Speed Measurement
4.3. BLCD Electrical Power Measurement
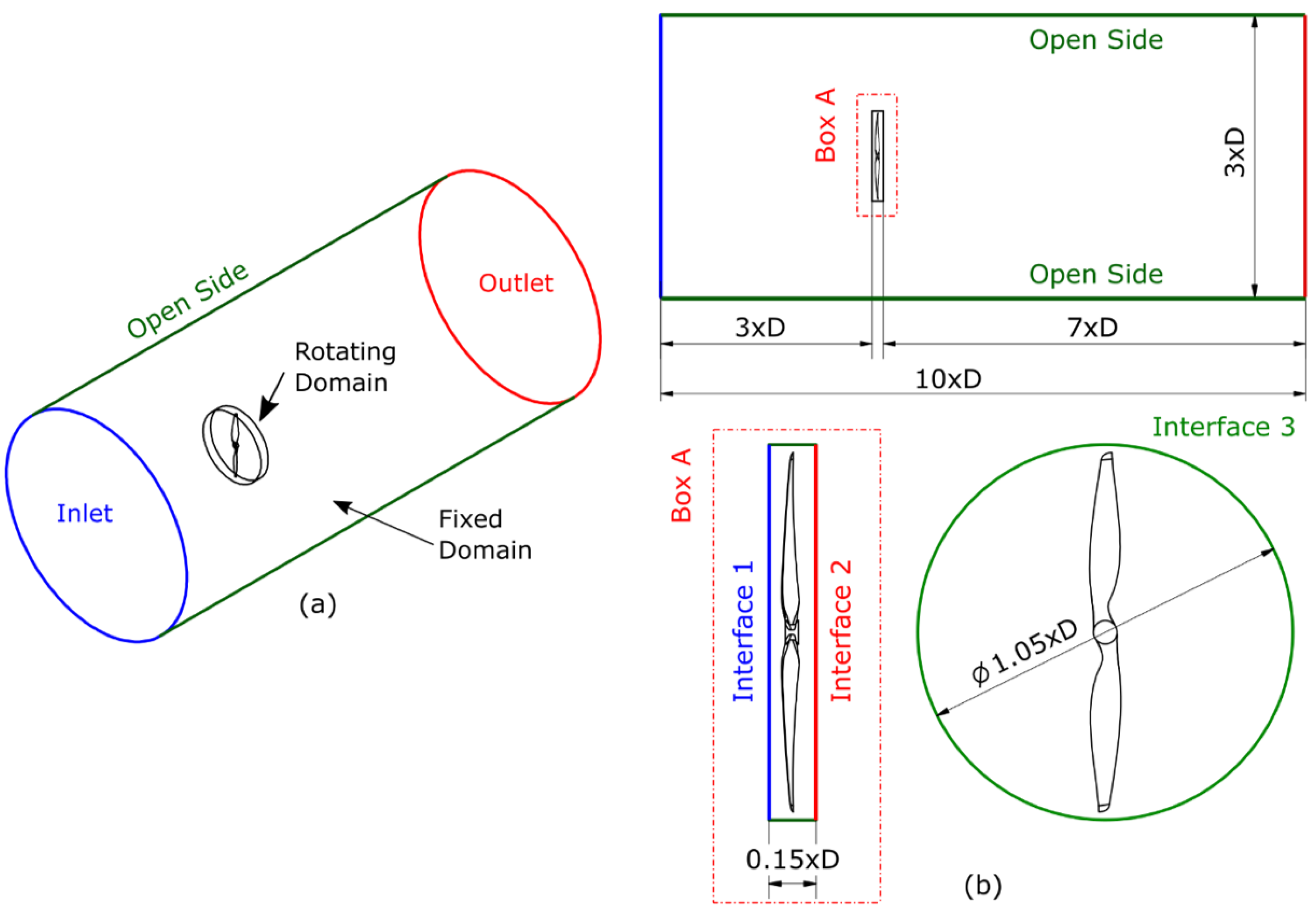
5. Computational Fluid Dynamics Analysis
5.1. Computational Fluid Dynamics Model
5.2. Computational Fluid Dynamics Domain
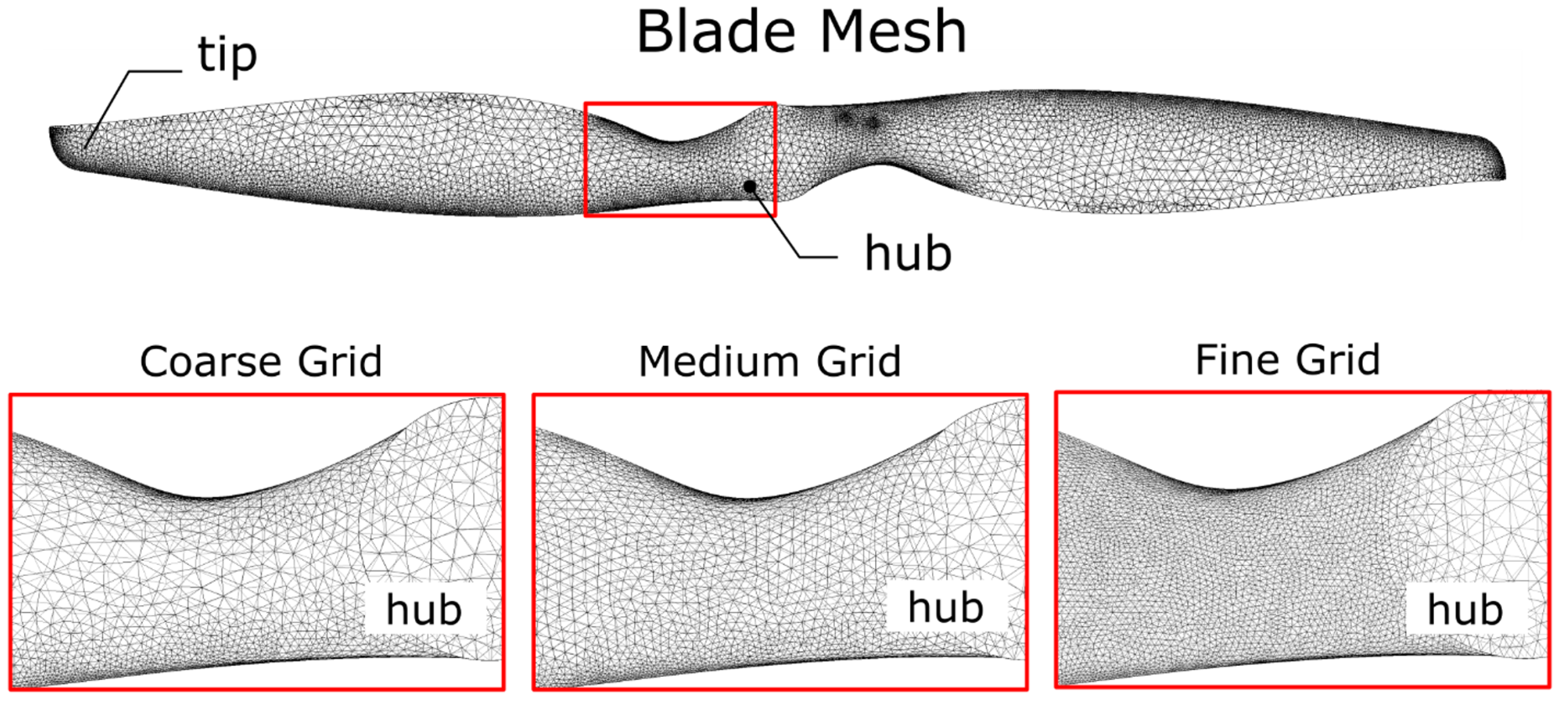
5.3. Computational Fluid Dynamics Mesh
5.4. Computational Fluid Dynamics Results and Validation
6. Results
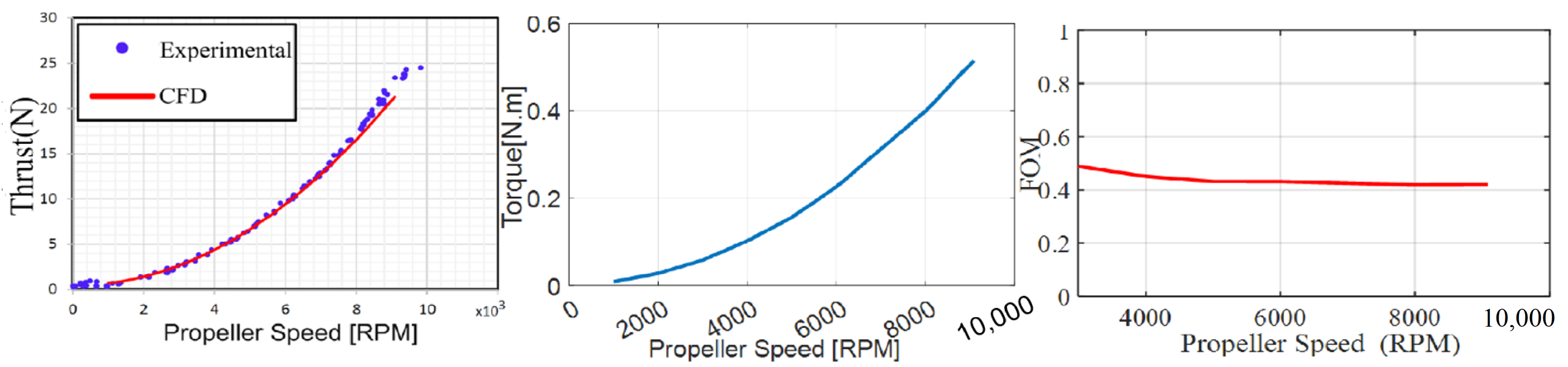
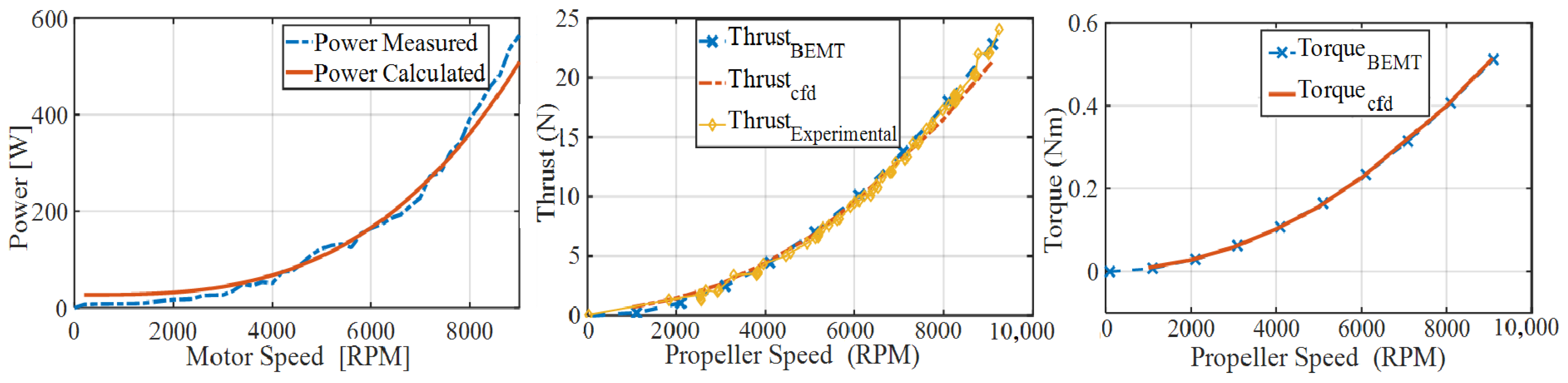
6.1. Static Performance Validation
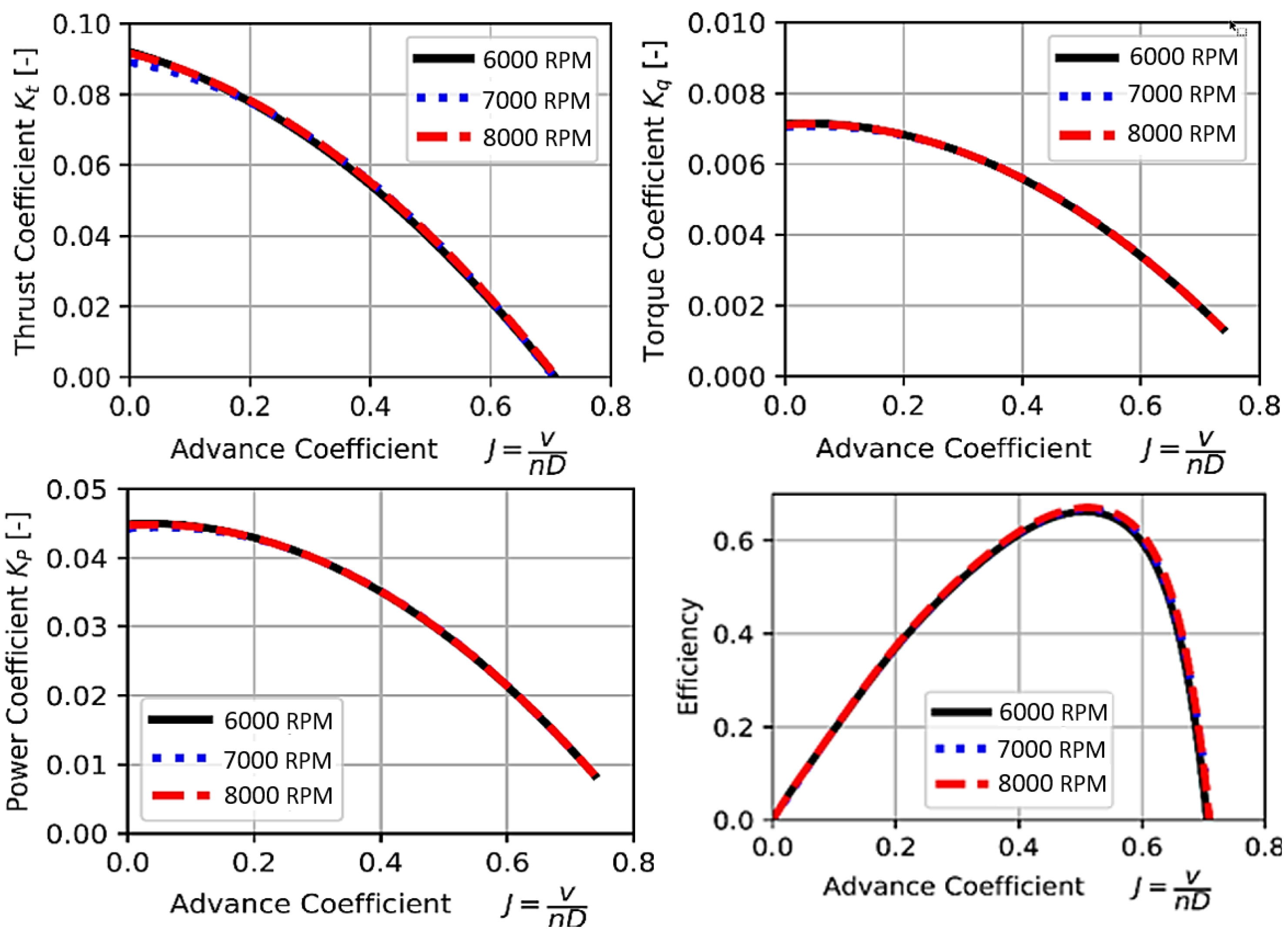
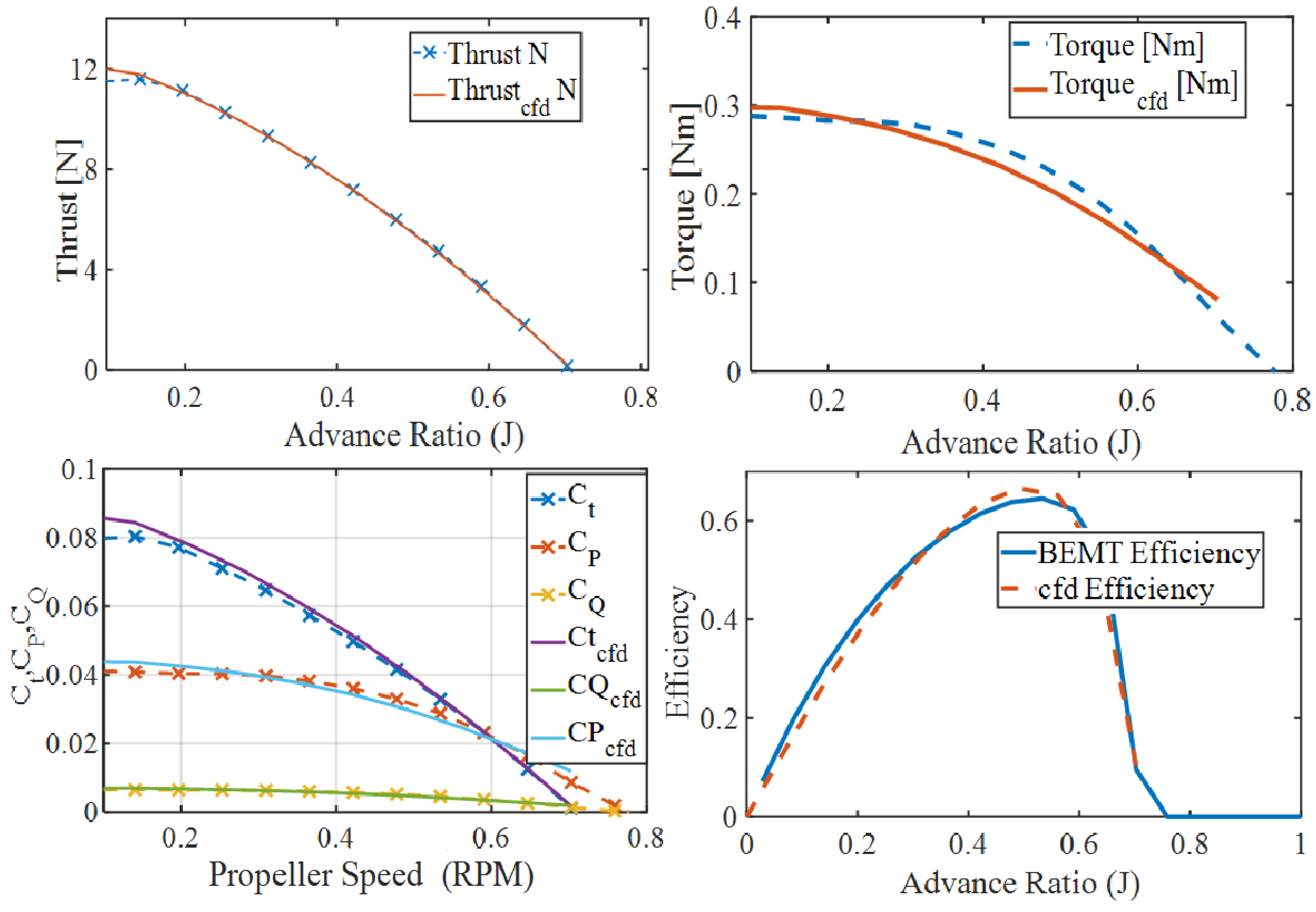
6.2. Dynamic Propeller Performance at Different Advance Ratios
6.3. Propulsion System Efficiency
7. Conclusions
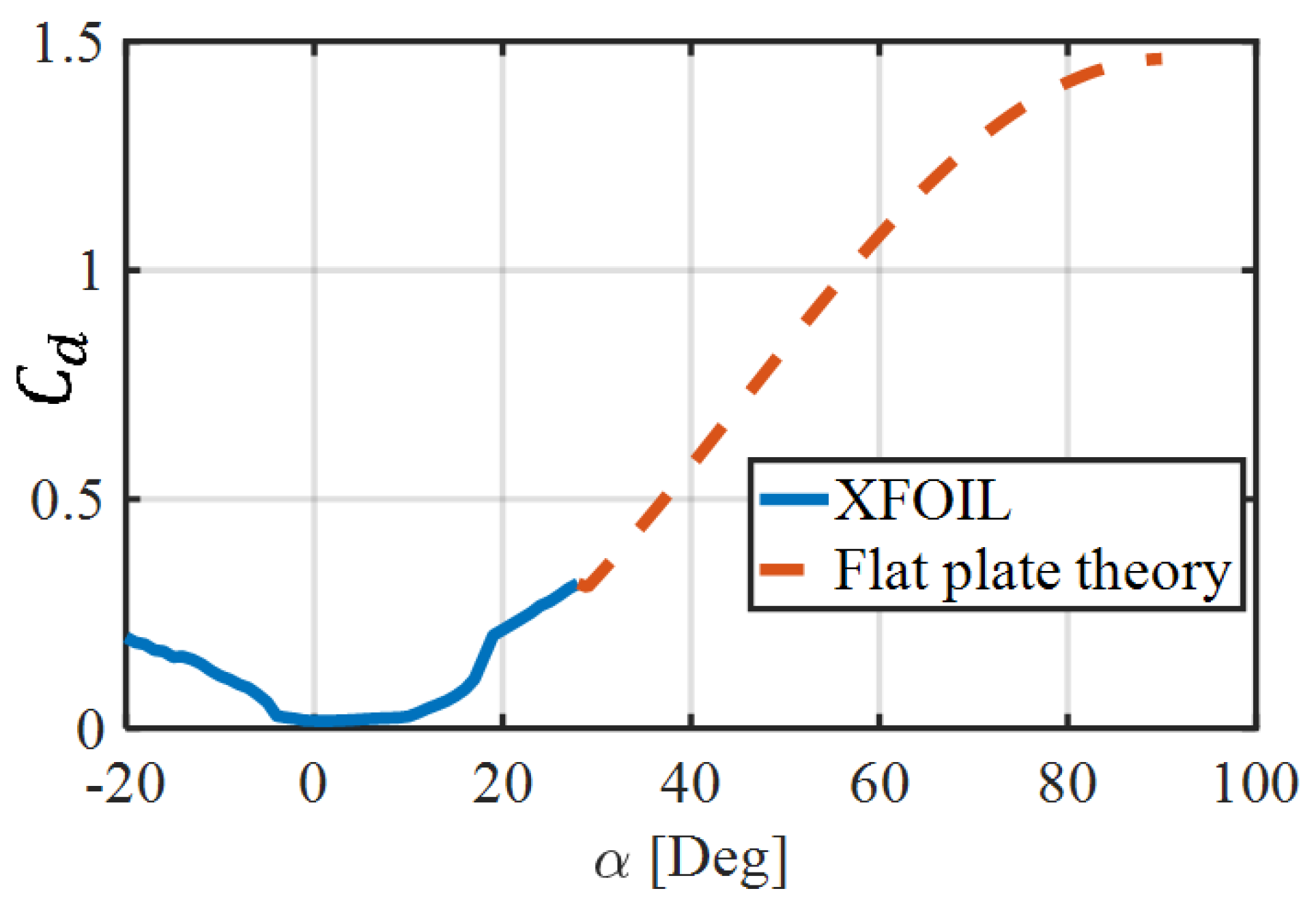
- A comprehensive range of and aerodynamic coefficients in the post-stall zone for the propeller was obtained by integrating XFOIL6.94 software with the flat-plate method. This approach successfully accounted for variations in the Reynolds and Mach numbers, enhancing the accuracy of the aerodynamic predictions.
- The proposed propeller sub-model effectively analyzes static and dynamic performance, as well as airflow properties, under the international standard atmosphere (ISA) model. This provides a reliable framework for predicting propeller behavior in various flight conditions.
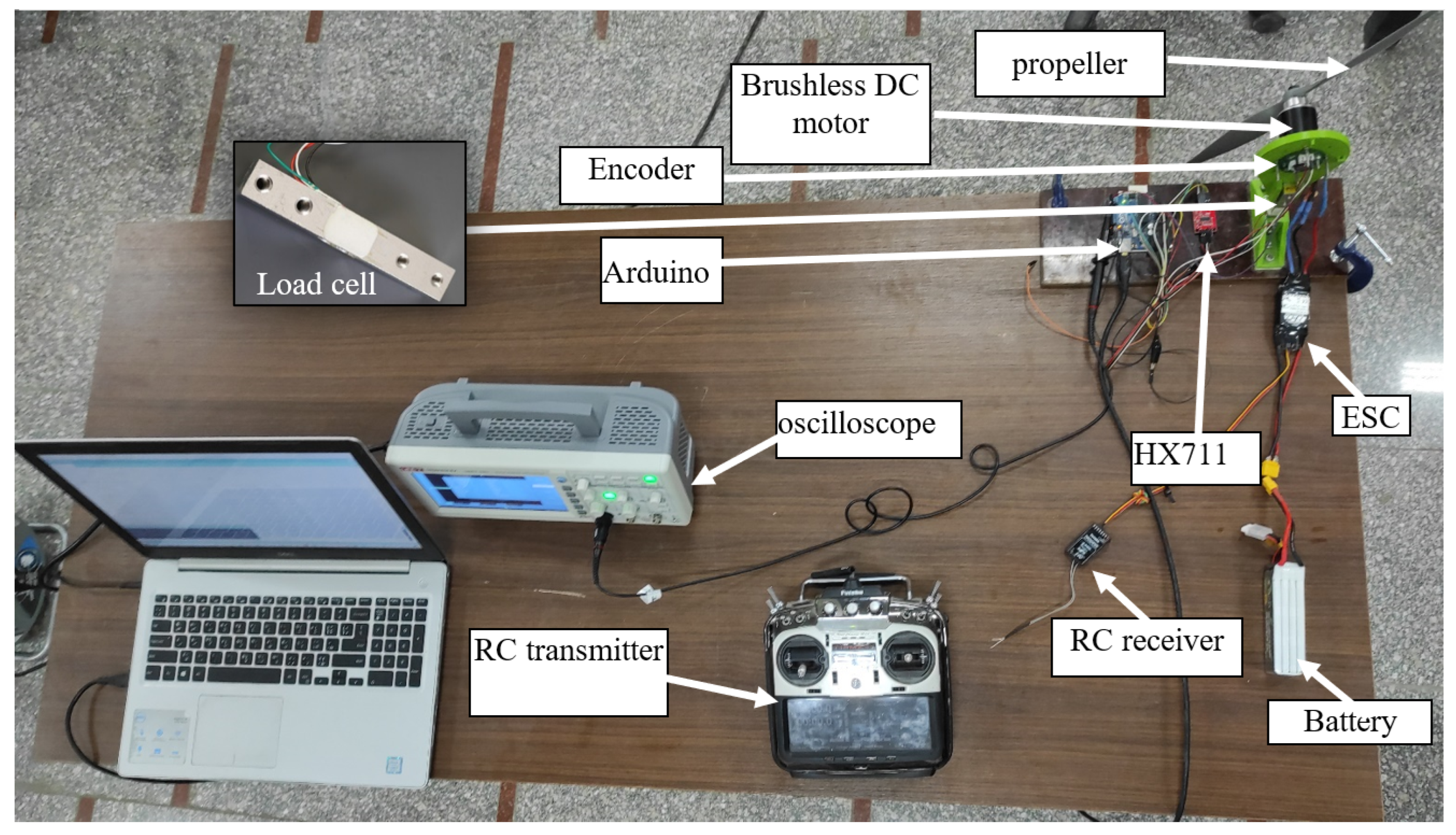
- A test rig was established to validate the CFD and the BEMT model regarding the static performance. Additionally, this setup can be employed for more dynamic performance investigations based on wind tunnels.
- CFD was successfully employed to evaluate the dynamic performance of the proposed low-computational-power model, confirming its effectiveness for real-time applications.
- An extensive analysis of BLDC motor performance was conducted across a wide range of RPMs, offering insights into load versus electrical power cases not typically supported by manufacturers. This analysis fills a critical gap in the existing knowledge, aiding in more accurate motor selection.
- The proposed model takes into account both the maximum discharge current of the battery and the maximum current of the electronic speed controller (ESC), considering the practical constraints and requirements.
- The compatibility between the motor and the propeller significantly influences the endurance; in this regard, the proposed model computes the total specific thrust as a means to assess the overall propulsion system efficiency.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hoyos, J.D.; Jímenez, J.H.; Alvarado, P. Improvement of electric aircraft endurance through propeller optimization via BEM-CFD methodology. In Proceedings of the Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; Volume 1733, p. 012011. [Google Scholar]
- Virginio, R.; Fuad, F.; Jihadil, M.; Ramadhani, M.; Rafie, M.; Stevenson, R.; Adiprawita, W. Design and implementation of low cost thrust benchmarking system (TBS) in application for small scale electric UAV propeller characterization. In Proceedings of the Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2018; Volume 1130, p. 012022. [Google Scholar]
- Khan, W.; Nahon, M. A Propeller Model for General Forward Flight Conditions; Emerald Group Publishing Limited: Leeds, UK, 2015; Volume 3, pp. 72–92. [Google Scholar]
- Dai, X.; Quan, Q.; Ren, J.; Cai, K.Y. Efficiency optimization and component selection for propulsion systems of electric multicopters. IEEE Trans. Ind. Electron. 2018, 66, 7800–7809. [Google Scholar] [CrossRef]
- Tan, Y.H.; Chen, B.M. Motor-propeller matching of aerial propulsion systems for direct aerial-aquatic operation. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; IEEE: New York, NY, USA, 2019; pp. 1963–1970. [Google Scholar]
- Etewa, M.; Safwat, E.; Abozied, M.A.H.; El-Khatib, M.M. Modeling and systematic investigation of a small-scale propeller selection. J. Eng. Sci. Mil. Technol. 2023, 7, 15–21. [Google Scholar] [CrossRef]
- Elbaioumy, M.K.; Elkhatib, M.M. Modelling and Simulation of Surface to Surface Missile General Platform. Adv. Mil. Technol. 2018, 13, 227–290. [Google Scholar] [CrossRef]
- Gad, M.; Mohamed, M.; Elkhatib, M. Design of an intelligent lateral autopilot for short range surface-to-surface aerodynamically controlled missile. In Proceedings of the 2020 15th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 15–16 December 2020; IEEE: New York, NY, USA, 2020; pp. 1–8. [Google Scholar]
- Drela, M. XFOIL Users Guide, Version 6.94; MIT Aero Astro Department: Cambridge, MA, USA, 2002. [Google Scholar]
- Liu, X.; Zhao, D.; Oo, N.L. Comparison studies on aerodynamic performances of a rotating propeller for small-size UAVs. Aerosp. Sci. Technol. 2023, 133, 108148. [Google Scholar] [CrossRef]
- Kamal, A.M. Modeling, Analysis and Identification of Airplane Flight Dynamics. Master’s Thesis, Military Technical College (MTC), Cairo, Egypt, 2014. [Google Scholar]
- Tangler, J.; Kocurek, D. Wind turbine post-stall airfoil performance characteristics guidelines for blade-element momentum methods. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 11–12 January 2005; p. 591. [Google Scholar]
- Ledoux, J.; Riffo, S.; Salomon, J. Analysis of the blade element momentum theory. SIAM J. Appl. Math. 2021, 81, 2596–2621. [Google Scholar] [CrossRef]
- McCrink, M.H.; Gregory, J.W. Blade element momentum modeling of low-reynolds electric propulsion systems. J. Aircr. 2017, 54, 163–176. [Google Scholar] [CrossRef]
- Bershadsky, D.; Haviland, S.; Johnson, E.N. Electric multirotor UAV propulsion system sizing for performance prediction and design optimization. In Proceedings of the 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, San Diego, CA, USA, 4–8 January 2016; p. 0581. [Google Scholar]
- Rubin, R.L.; Zhao, D. New development of classical actuator disk model for propellers at incidence. AIAA J. 2021, 59, 1040–1054. [Google Scholar] [CrossRef]
- Oktay, T.; Eraslan, Y. Computational fluid dynamics (Cfd) investigation of a quadrotor UAV propeller. In Proceedings of the International Conference on Energy, Environment and Storage of Energy, Xi’an, China, 7–9 August 2020; pp. 1–5. [Google Scholar]
- Penkov, I.; Aleksandrov, D. Analysis and study of the influence of the geometrical parameters of mini unmanned quad-rotor helicopters to optimise energy saving. Int. J. Automot. Mech. Eng. 2017, 14, 4730–4746. [Google Scholar] [CrossRef]
- Oktay, T.; Eraslan, Y. Numerical investigation of effects of airspeed and rotational speed on quadrotor UAV propeller thrust coefficient. J. Aviat. 2021, 5, 9–15. [Google Scholar] [CrossRef]
- Li, Y.; Yonezawa, K.; Liu, H. Effect of ducted multi-propeller configuration on aerodynamic performance in quadrotor drone. Drones 2021, 5, 101. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery Voltage | Propeller | RPM | Current (A) | Elec. Power (W) | Mech. Power (W) | Thrust (N) | Total Specific Thrust (g/w) | Endurance (min) |
|---|---|---|---|---|---|---|---|---|
| 11.1V(3 S) 5200 mAh | 3000 | 2.27 | 25.18 | 18.41 | 2.3 | 9.34 | 116.92 | |
| 4000 | 5.31 | 58.93 | 42.96 | 4.23 | 7.32 | 49.95 | ||
| 5000 | 10.5 | 116.6 | 82.92 | 6.71 | 5.87 | 25.25 | ||
| 6000 | 18.59 | 206.39 | 142.05 | 9.77 | 4.83 | 14.26 | ||
| 7000 | 30.4 | 337.44 | 224.1 | 13.38 | 4.05 | 8.72 | ||
| 8000 | 46.83 | 519.82 | 332.8 | 17.57 | 3.45 | 5.66 | ||
| 9000 | 68.88 | 764.57 | 471.91 | 22.32 | 2.98 | 3.85 | ||
| 3000 | 2.46 | 27.28 | 19.83 | 2.96 | 11.09 | 107.92 | ||
| 4000 | 5.84 | 64.83 | 46.64 | 5.46 | 8.59 | 45.41 | ||
| 5000 | 11.69 | 129.72 | 90.49 | 8.69 | 6.83 | 22.69 | ||
| 6000 | 20.86 | 231.58 | 155.58 | 12.66 | 5.58 | 12.71 | ||
| 7000 | 34.35 | 381.27 | 246.08 | 17.37 | 4.65 | 7.72 | ||
| 8000 | 53.23 | 590.81 | 366.19 | 22.82 | 3.94 | 4.98 | ||
| 9000 | 78.69 | 873.4 | 520.08 | 29.01 | 3.39 | 3.37 |
| Battery Voltage | Propeller | RPM | Current (A) | Elec. Power (W) | Mech. Power (W) | Thrust (N) | Total Specific Thrust (g/w) | Endurance (min) |
|---|---|---|---|---|---|---|---|---|
| 11.1V(3 S) 5200 mAh | 3000 | 2.47 | 27.42 | 18.41 | 2.3 | 8.57 | 107.36 | |
| 4000 | 5.13 | 56.93 | 42.96 | 4.23 | 7.57 | 51.71 | ||
| 5000 | 9.38 | 104.12 | 82.92 | 6.71 | 6.58 | 28.27 | ||
| 6000 | 15.67 | 173.92 | 142.05 | 9.77 | 5.73 | 16.93 | ||
| 7000 | 24.45 | 271.42 | 224.1 | 13.38 | 5.03 | 10.85 | ||
| 8000 | 36.22 | 402 | 332.8 | 17.57 | 4.46 | 7.32 | ||
| 9000 | 51.46 | 571.26 | 471.91 | 22.32 | 3.99 | 5.15 | ||
| 3000 | 2.62 | 29.06 | 19.83 | 2.96 | 10.41 | 101.32 | ||
| 4000 | 5.52 | 61.25 | 46.64 | 5.46 | 9.09 | 48.06 | ||
| 5000 | 10.2 | 113.25 | 90.49 | 8.69 | 7.83 | 25.99 | ||
| 6000 | 17.17 | 190.62 | 155.58 | 12.66 | 6.77 | 15.44 | ||
| 7000 | 26.96 | 299.26 | 246.08 | 17.37 | 5.92 | 9.84 | ||
| 8000 | 40.12 | 445.36 | 366.19 | 22.82 | 5.23 | 6.61 | ||
| 9000 | 57.24 | 635.4 | 520.08 | 29.01 | 4.66 | 4.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Etewa, M.; Hassan, A.F.; Safwat, E.; Abozied, M.A.H.; El-Khatib, M.M.; Ramirez-Serrano, A. Performance Estimation of Fixed-Wing UAV Propulsion Systems. Drones 2024, 8, 424. https://doi.org/10.3390/drones8090424
Etewa M, Hassan AF, Safwat E, Abozied MAH, El-Khatib MM, Ramirez-Serrano A. Performance Estimation of Fixed-Wing UAV Propulsion Systems. Drones. 2024; 8(9):424. https://doi.org/10.3390/drones8090424
Chicago/Turabian StyleEtewa, Mohamed, Ahmed F. Hassan, Ehab Safwat, Mohammed A. H. Abozied, Mohamed M. El-Khatib, and Alejandro Ramirez-Serrano. 2024. "Performance Estimation of Fixed-Wing UAV Propulsion Systems" Drones 8, no. 9: 424. https://doi.org/10.3390/drones8090424