Abstract
This study explores the evolving trends and research issues in the field of drone-assisted multimodal logistics over the past two decades. By employing various text-mining techniques on related research publications, we identify the most frequently investigated topics and research issues within this domain. Specifically, we utilize titles, abstracts, and keywords from the collected studies to perform both Latent Dirichlet Allocation techniques and Term Frequency-Inverse Document Frequency analysis, which help in identifying latent topics and the core research themes within the field. Our analysis focuses on three primary categories of drone-assisted logistics: drone–truck, drone–ship, and drone–robot systems. The study aims to uncover which latent topics have been predominantly emphasized in each category and to highlight the distinct differences in research focuses among them. Our findings reveal specific trends and gaps in the existing literature, providing a clear roadmap for future research directions in drone-assisted multimodal logistics. This targeted analysis not only enhances our understanding of the current state of the field but also identifies critical areas that require further investigation to advance the application of drones in logistics.
1. Introduction
The rapid advancements in Unmanned Aerial Vehicle (UAV) technology, commonly referred to as drones, over the past decade, have led to their widespread application across various industries. In particular, the logistics industry has increasingly adopted drones, as their advancing capabilities have transformed them from experimental tools into integral components of modern logistics systems, especially in delivery services [1,2]. For instance, some countries have incorporated drones into last-mile delivery processes to enhance efficiency and speed in both urban and rural areas [3]. Amazon is a key player in this technology, having initiated package delivery across various regions in the United States, including both urban and rural areas [4]. Additionally, post offices in Korea are strengthening public delivery services by testing drones for parcel delivery to remote islands affected by logistical inequality [5]. Accordingly, numerous studies in academia have emerged that explore the integration of drones into last-mile delivery. The role of drones in logistics is becoming increasingly emphasized, not only through the integration of drones with vehicles in the last mile but also through new modes that link drones with delivery personnel [6,7]. This shift has been accompanied by significant advancements in related technologies, such as improved battery life, autonomous navigation, and sophisticated sensing and control systems.
In line with this trend, lots of efforts to summarize the past related research have been tried so far [8,9,10,11]. Li et al. [8] published a review paper that focuses on the application of UAVs in logistics, examining studies from 2021 to 2022. The review classified the selected studies into theoretical models, application scenarios, and other problems. Theoretical models primarily address path-planning problems like the traveling salesman problem. Application scenarios include medical safety applications and last-mile delivery issues. Their research discussed the advantages of UAVs, such as flexibility, low cost, and environmental benefits, while also noting challenges like regulatory obstacles and implementation costs. Future research directions include optimizing path planning algorithms and exploring new application scenarios to enhance UAV efficiency in logistics. Eskandaripour and Boldsaikhan [9] presented a comprehensive review of the evolution, current state, and future prospects of last-mile drone delivery. This study discussed the various technological advancements that have made drone delivery feasible, such as improvements in battery life, navigation systems, and regulatory frameworks. The paper identified key benefits of drone delivery, including reduced delivery times, lower operational costs, and decreased traffic congestion. However, it also highlighted significant challenges, such as safety concerns, regulatory hurdles, and public acceptance. Future directions include further advancements in drone technology and improved integration with existing logistics systems to ensure safe and efficient drone operations. Li et al. [10] provided a methodological review of drone-aided delivery methods, identifying key challenges and future research directions. This study categorized existing literature into various problem types, such as the traveling salesman problem, vehicle routing problems, and urban last-mile problems. The review highlighted the technological, safety, societal, and environmental challenges associated with drone delivery. It also discussed the advantages of drones, such as increased speed and efficiency and improved accessibility. The paper called for more comprehensive research into optimizing delivery methods, addressing societal concerns, and developing robust regulatory frameworks to support the widespread adoption of drones in logistics. Rejeb et al. [11] examined the potential and challenges of drones in Supply Chain Management (SCM) and logistics through a systematic literature review. They identified the strengths of drone applications, such as supporting humanitarian logistics, reducing delivery times and costs, improving flexibility, and enhancing sustainability. The challenges were grouped into technical, organizational, safety, and regulatory categories. The paper also explored real-life drone deployments in SCM and logistics, providing a research agenda for future studies. Key areas for future research include technical advancements, better integration with existing logistics systems, and more detailed studies on regulatory impacts and public perception.
Despite the extensive coverage of drone applications in existing review papers, one promising aspect of modern logistics systems is notably absent: the integration of drones with other transportation modes, termed Drone-assisted Multimodal Logistics (D-ML). Incorporating drones can significantly enhance and support single-mode logistics systems. For instance, drone-truck systems can improve last-mile delivery efficiency by allowing trucks to handle bulk transportation over longer distances while drones complete the final leg. Drone–ship collaborations can expedite the transfer of goods from ports to inland destinations, overcoming maritime logistics bottlenecks. Similarly, drone–robot partnerships can optimize warehouse operations or last-mile delivery, with drones managing parcels from above and robots handling ground-level tasks. These multimodal approaches streamline logistics operations, reduce delivery times, and improve overall efficiency.
Although several studies examine D-ML and some review papers mention it as a future direction, D-ML is not yet formally classified or discussed in depth. Clear definitions and thorough investigations of this novel system are still lacking. This lack of systematic evaluation leaves the potential and challenges of multimodal logistics systems involving drones underexplored. As ref. [12] noted, however, relying on a single mode of logistics is less feasible in an increasingly expansive and complex logistics environment. The future of logistics will likely depend on the seamless integration of multiple logistics modes, with drones playing a crucial role in enhancing efficiency and flexibility.
A systematic review of D-ML is therefore essential to consolidate existing knowledge into a classification framework and pave the way for innovative logistics strategies that leverage drone technology alongside other transport modes. Consequently, this study investigates research trends and topics from 2004 to 2023, focusing on the evolution of research in three categories of D-ML: drone–truck, drone–maritime, and drone–robot logistics. The three categories were chosen based on their prominence in the literature and their representation of key areas where drones are being integrated with other transport modes to address specific logistical challenges.
We utilize the Latent Dirichlet Allocation (LDA) technique to uncover latent topics, which are subsequently classified into application domains and operational/technical aspects. Additionally, the annual increase and decrease of these potential topics are analyzed, identifying “hot” topics that are on the rise and “cold” topics that are declining, based on the trend slope of the average topic distribution per year. Furthermore, for each category of D-ML, prominent words in related studies are extracted and compared using the Term Frequency-Inverse Document Frequency (TF-IDF) methodology, and the dominant topics are identified over time. Based on these findings, the reasons for the differences in research among the categories of D-ML are explored, and research topics for future investigation are proposed. By understanding how drones can be integrated with trucks, ships, and robots, researchers and industry practitioners can develop more diverse and scalable logistics solutions.
The remainder of this paper is organized as follows. In Section 2, we provide an in-depth exploration of D-ML, outlining the key systems—drone–truck, drone–maritime, and drone–robot—and how each integrates with existing logistics frameworks. This foundation sets the stage for identifying research trends and topics. Section 3 details the main methodologies employed in this study, including LDA and TF-IDF, explaining their relevance and application in the context of our research. Following this, Section 4 presents the experimental design, where we describe the data selection, preprocessing steps, and the process of tuning the LDA model’s hyperparameters to ensure accurate analysis. Section 5 then offers a comprehensive results and analysis segment featuring TF-IDF, topic discovery, topic classification, and an analysis of dominant topics over time within the categories of drone–truck, drone–maritime, and drone–robot logistics. Finally, Section 6 provides concluding remarks and suggests directions for future research.
2. Drone-Assisted Multimodal Logistics
The integration of drones with the current single-mode logistics systems has revolutionized the logistics industry, creating a more efficient and versatile multimodal system. By combining the agility and speed of drones with the extensive reach of existing systems, logistics providers can enhance delivery speed, reduce operational costs, and reach previously inaccessible areas. During our prescreening of the literature, these three categories—drone–assisted truck, maritime, and robotic logistics—emerged as the most prevalent and impactful areas where drones are integrated with other transport modes. Accordingly, this section explores the synergistic use of drones in three distinct multimodal logistics categories. Each combination leverages the unique strengths of drones to complement and enhance the capabilities of current operations, resulting in a more dynamic and responsive logistics system.
2.1. Drone-Assisted Truck Logistics
Drones and trucks offer distinct advantages and limitations in delivery applications. Drones are characterized by their speed, lightweight design, and flexible routing capabilities, making them ideal for time-sensitive deliveries on constrained ground routes [13,14]. However, they are limited by load capacity and travel range. Trucks, conversely, are suitable for transporting large volumes of items over long distances. A common example of drone-assisted truck logistics is where trucks deliver large quantities of goods to a centralized location, and drones then distribute items to remote or difficult-to-access areas. This method is particularly effective in regions where truck navigation is challenging or cost prohibitive.
Drone-assisted truck logistics can be systematically categorized into two operational modes: synchronous and independent (Figure 1). In the synchronous mode, a truck operates in tandem with several drones to complete the final delivery to customers. The truck carries not only the items but also the drones and their charging systems. At designated points, the truck deploys the drones to deliver items to customers. Meanwhile, the truck can continue to deliver some items while moving to the next deployment point to meet up with the drones again [14,15] or just wait at the parking spot for the drones to come back [16,17]. Key considerations for this mode include optimizing the deployment points to minimize overall delivery time, ensuring the drones’ battery life and charging needs are met, and coordinating the truck’s route to efficiently rendezvous with the drones [15,16,17]. Additionally, the load capacities of both the truck and drones must be balanced to ensure that each delivery segment is handled effectively.
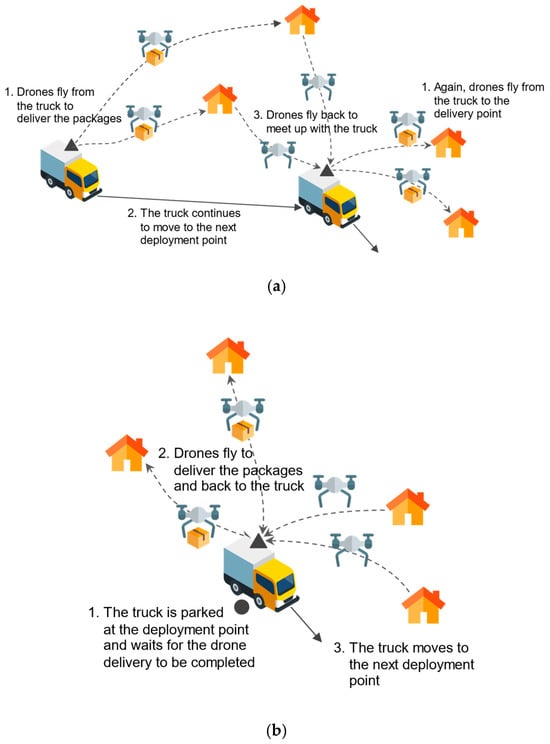
Figure 1.
Drone-assisted truck logistics: (a) synchronous mode, (b) independent mode.
The independent mode is less dynamic than the synchronous mode: the operations of trucks and drones are independent yet interconnected through a central depot. In this mode, both trucks and drones have the same role in delivering items from the depot to the customers. This approach is akin to traditional multimodal logistics, such as trucks and motorcycles handling the last-mile delivery to customers. The decision-making process involves allocating and scheduling the deliveries of trucks and drones, taking into account the available routes, as well as their loading capacities and speeds. For example, in consideration of the available routes, drones can be utilized for delivery points that trucks cannot approach [18]. Meanwhile, for drones, it is essential to account for their charging or battery replacement schedules [14], and the delivery points must be within their operational flight range from the depot [19].
In addition to academic research, the industry has also focused on exploring the possibilities and addressing the challenges of combined drone–truck operations. For example, UPS tested a residential package delivery system where a drone is launched from the roof of a delivery truck [20]. In this test, the drone, capable of flying for 30 min and carrying 10 pounds of packages, flew to the delivery point and then returned to the vehicle while the truck proceeded to the next delivery point. Similarly, Amazon has registered a patent describing a system where delivery vans carry items close to their final destination and then deploy drones to complete the last leg of the delivery [21]. Unlike the UPS test, Amazon’s patent envisions the use of multiple drones operating from a single vehicle, highlighting a different approach to integrating drone technology into delivery logistics.
Although the technological and operational aspects of drone–truck collaboration have been extensively covered in the literature, real-world examples of such systems remain rare. While many studies have conducted experimental analyses in controlled or simulated environments, there is a lack of widespread, practical implementations that demonstrate the full potential of these systems under diverse real-world conditions. As efforts are made to address challenges like seamless integration with existing logistics networks, maintaining interoperability with current technologies, and scaling operations to accommodate varying delivery volumes, new topics and issues are likely to emerge. Understanding these practical dynamics is crucial for advancing drone-assisted truck logistics from theoretical and experimental stages to robust, scalable, real-world applications.
2.2. Drone-Assisted Maritime Logistics
Drone-assisted maritime logistics leverages drones to enhance the efficiency and reach of maritime delivery operations. Ships transport large quantities of goods over vast distances but face challenges in final delivery to coastal or remote areas. Drones can navigate congested port areas and tight spaces to deliver items efficiently [22]. This approach is advantageous in regions with difficult terrain, limited infrastructure, or insufficient docking facilities for large vessels (Figure 2a).
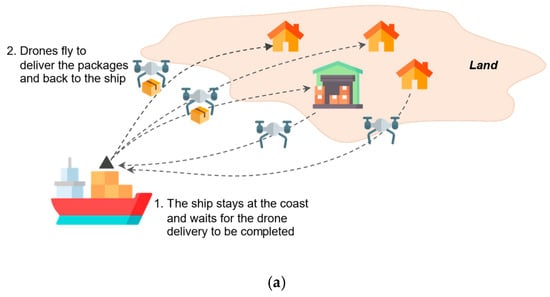
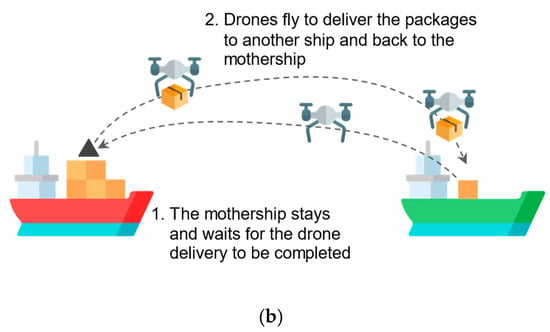
Figure 2.
Drone-assisted maritime logistics: (a) ship to shore, (b) ship to ship.
In addition to overcoming challenges in final delivery, drones increase the agility and time efficiency of the loading and unloading processes of ships [23]. By introducing novel methods of delivery, drones provide significant operational benefits to maritime logistics. For instance, the Side-Pull Maneuver (SPM) allows drones to drag goods along the sea surface rather than picking them up directly from the ship. This innovative method reduces the need for complex loading mechanisms on drones and enhances the speed and efficiency of the delivery process [24].
Using drones to move items between ships and shore can also be applied to transferring goods between ships (Figure 2b). In the ship-to-ship mode, drones transfer goods between vessels at sea, facilitating the delivery of essential supplies, spare parts, or documents without requiring the ships to dock. This capability is especially useful in maintaining continuous operations and reducing downtime for ships that would otherwise need to interrupt their journeys.
Several companies have begun to explore and implement drone-assisted maritime logistics. For example, Maersk Tanker, a Danish tanker company, tested their first drone delivery to a vessel in 2016 to explore the potential of integrating drones into their supply chain [25,26]. Maersk Tankers was optimistic about the cost-saving potential of drones, noting that substituting barge transport with drones could lead to substantial savings across their fleet. Additionally, drones offer benefits such as conducting inspections to identify cracks or other issues, enhancing operational efficiency and safety. The company also stressed the importance of ensuring drone safety, stating that drones must be certified as intrinsically safe to operate in their environment. However, there have been no significant updates on their progress since the initial test.
More recently, the U.S. Navy conducted a test in 2024 using drones for ship-to-ship deliveries [27]. The test demonstrated that using drones to transport medical supplies and critical parts between vessels at sea is a feasible option. Similar to the findings from Maersk Tanker’s test, it also showed that the use of drones could enhance logistical efficiency by enabling continuous operations and reducing the need for ships to dock for minor deliveries without relying on larger manned aircraft or helicopters.
While the potential benefits of drone-assisted maritime logistics are considerable, still many questions remain unsolved to implement these systems effectively in real-world scenarios. For example, beyond technical advancements and regulatory compliance, operational considerations play a critical role. Ships typically carry much larger loads than drones can manage, necessitating careful prioritization of which loads are suitable for drone transport. Decision-makers must develop strategic plans that integrate drones into existing logistics workflows, including how to operate ships, drones, and port facilities efficiently. Furthermore, the use of drones for ship-to-ship or ship-to-shore transport may be either a one-time solution or a regular support method, depending on specific logistical needs. Managers need to consider tactical planning, such as determining the number and specifications of drones required based on historical transportation data from ships and ports. These factors must be carefully considered to optimize the use of drones in maritime logistics and ensure sustainable operations.
2.3. Drone-Assisted Robot Logistics
Autonomous Delivery Vehicles (ADVs) are gaining attention in both academia [28] and industry logistics [29]. These self-driving vehicles use advanced sensors and navigation systems to travel independently on roads and sidewalks. Additionally, robots such as ADVs are being considered as a means for last-mile delivery in indoor environments [30]. Thus, the combination of drones and ADVs represents an innovative frontier for delivery operations, enhancing the efficiency and reach of last-mile delivery services.
Drones and ADVs both use electric power and offer higher energy efficiency compared to traditional delivery methods such as trucks and vans, but they differ significantly in payload capacity, range, and speed. In comparison, drones have lower payload capacity and shorter range but operate faster [31], while ADVs can handle larger payloads and longer distances [32] at slower speeds [28]. Although both systems have a minor impact on traffic and are cost-effective, ADVs are less influenced by weather [33] and face fewer legal concerns [31] compared to drones. Thus, the cooperation of drones and ADVs leverages their respective strengths while mitigating their shortcomings. The possible mode of drone-assisted robot logistics is shown in Figure 3. In this cooperation, drones and ADVs help one another to complete the final delivery.

Figure 3.
Drone-assisted robot logistics.
Building on these potential advantages, a few studies have demonstrated promising results in the collaboration between drones and ADVs for delivery purposes [34,35]. For example, in the work of [34], drones and ADVs work together based on the predefined mission and subtasks to complete the delivery, such as picking up the parcel, transporting it to the destination, carrying it alone, and passing it to the other vehicles. The system simulates the energy consumption of each possible scenario and selects the most efficient option. The results demonstrated effective cooperation: when the ADV encounters ground obstacles, the drone takes the package, crosses the obstacles, and passes it to the ADV on the other side. Further work by the authors [35] showed that the improved system continues to function effectively in a more complex environment.
Nevertheless, many challenges still remain to be solved in realizing drone-assisted robotic logistics. Since both systems are autonomous, they require a more sophisticated synchronization system to operate together effectively, given minimal human involvement. These include how to synchronize the two autonomous systems, determining which method should serve which customer based on their attributes, and navigating without invading restricted areas in a real-world condition [28]. Additionally, ensuring robust communication between drones and ADVs, developing reliable obstacle detection and avoidance algorithms, and securing regulatory approvals are critical hurdles.
3. Methodology
To identify research trends and issues in the field of drone-assisted multimodal logistics, several key techniques, including TF-IDF, LDA, and Collapsed Gibbs Sampling, were employed. Additionally, for a more detailed analysis, the topic distributions of each document obtained from the LDA results were used to classify topics into hot and cold topics. Furthermore, by identifying the dominant topic for each document, we examined the changes in research subjects within D-ML.
TF-IDF was utilized to determine the significance of terms within the documents. LDA was implemented as a generative probabilistic model to uncover the hidden topic structures within the document collections. Collapsed Gibbs Sampling was applied to perform approximate inference in the LDA model. Furthermore, hyperparameter tuning was conducted to optimize the performance of the LDA model, ensuring the most interpretable and accurate topic identification. This section details the methodologies and processes applied to achieve these objectives.
3.1. TF-IDF
TF-IDF is a statistical measure used to evaluate the importance of a word in a document relative to a collection of documents (corpus). This method is particularly useful for identifying keywords and important terms in documents [36]. TF-IDF helps in identifying terms that are both significant within a specific document and relatively rare across the corpus. TF-IDF is calculated as follows:
The TF-IDF value increases proportionally with the number of times a word appears in the document but is offset by the frequency of documents containing the word, which helps to adjust for the fact that some words appear more frequently in general. High TF-IDF scores indicate words that are particularly important to the document’s content but are not common enough to be considered stopwords.
3.2. LDA
LDA is a generative probabilistic model used for topic modeling [37]. It assumes that documents are mixtures of topics and that topics are mixtures of words. The main goal of LDA is to discover the hidden topic structure in a collection of documents. Figure 4 illustrates the structure of the LDA model.
Figure 4.
LDA model structure. Reprinted from [38].
LDA starts with random probability distributions and iteratively refines these distributions based on the observed data. It updates the topic distributions over words based on the words observed in each document, ultimately determining the probability distribution of each document over topics, the distribution of each topic over words, and the topic assignment for each word. Specifically, LDA computes the posterior distribution, where is the topic distribution for a document, governed by parameter ; is the word distribution for topic , governed by parameter ; is the topic assigned to the word in document ; and represents the observed word in document .
This posterior distribution, which is multinomial, is calculated as follows [39]:
The numerator can be expanded as follows [39]:
This joint distribution accounts for all the random variables involved. The variables and follow Dirichlet distributions conditioned on parameters and , respectively. Since the denominator is intractable to calculate directly, approximate methods like collapsed Gibbs sampling are used.
3.3. Collapsed Gibbs Sampling
To implement collapsed Gibbs sampling for LDA, it is necessary to compute the probability that a specific topic is assigned to word , conditioned on all other topic assignments. Formally, the posterior to be computed is:
Here, denotes the probability that topic is allocated to word , and represents all other topic assignments except for . By applying conditional probability rules, the following equation is obtained:
In this equation, is the number of occurrences of topic in document , is the number of times word appears in topic , and are hyperparameters associated with the Dirichlet distribution, is the number of topics, and is the number of words in the corpus.
The process for collapsed Gibbs sampling can be outlined as follows:
- Randomly assign an initial topic to each word.
- Starting from the first word () of the first document (), perform the following steps:
- Calculate by varying the topic and select one of the topics based on the calculated probability.
- Repeat the above step for each word until the last word () of the last document () is reached.
- Continue steps 2–4 until the topic assignments for each word stabilize.
3.4. Hyperparameter Tuning in LDA Model
Hyperparameter tuning is critical for optimizing the performance of the LDA model. The primary hyperparameters considered in this study were the number of topics (K), the hyperparameter , which is related to document–topic distribution, and , which is related to the topic–word distribution. The tuning process was proceeded by running the LDA model with different combinations of these hyperparameters and evaluating each model’s perplexity and coherence scores.
The perplexity score is calculated as follows [37]:
where is the number of words in document , is the log probability of the document d under the model. In the context of topic models, lower perplexity values indicate a better model because they signify that the model is more effective at predicting unseen documents.
The coherence score measures the degree of semantic similarity between high-scoring words in each topic, while the perplexity score assesses how well the model predicts a sample. The coherence score is calculated as follows [40]:
where is the number of documents containing both words and and are the number of documents containing and , respectively, and ϵ is a small constant to prevent division by zero [41]. High coherence scores typically indicate that the top words are semantically related, thus making them more comprehensible to humans.
The optimal hyperparameter combination for the LDA model can be determined using perplexity and coherence scores. By evaluating the perplexity and coherence scores for various combinations of , , and , it is possible to observe how these scores change with different values for each alpha and beta combination. This approach allows for the selection of the optimal , , and for the LDA model. Typically, the optimal combination of , , and is selected when perplexity decreases and coherence increases, reflecting the results of hyperparameter tuning.
Figure 5 illustrates an example of hyperparameter tuning. The first step in hyperparameter tuning is for the user to define the search space for the LDA hyperparameters, namely , , and . Once the search space is defined, an LDA model is constructed for each combination, and the corresponding perplexity and coherence scores are recorded. After storing the perplexity and coherence scores for all combinations, the results are visualized, as shown in Figure 5. The combinations that demonstrate decreasing perplexity and increasing coherence are explored, and one of the selected hyperparameter combinations is chosen as the final result of hyperparameter tuning.
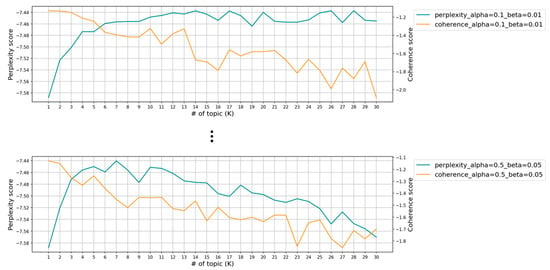
Figure 5.
Graphical example of LDA hyperparameter tuning.
3.5. Analysis of the Topic Proportion Changes
Using the results obtained from the LDA model, we can not only understand the topics represented by each topic but also utilize the per-document topic proportions to classify whether a topic is a rising hot topic or a declining cold topic over time. This classification is achieved by analyzing the trend slopes of the average topic proportions by year [42,43]. Additionally, by utilizing the topic proportions of each document, we can understand the distribution patterns of topics over time by observing the changes in the average proportions of each topic per year.
3.5.1. Hot and Cold Topics
To classify hot and cold topics, we first calculate the annual average values of per-document topic proportions () obtained from the LDA model. We then examine the trend slopes for each topic over time [42,43]. If the slope of the trend line is positive, the topic is classified as a hot topic, indicating an increasing trend over time. Conversely, if the slope is negative, the topic is classified as a cold topic, indicating a decreasing trend over time. The annual average topic proportion can be calculated as follows:
where is the average topic proportion of topic in year , is the total number of documents in year , is the set of documents in year , is the topic proportion of topic in document .
This method allows for the identification of trending topics and provides insights into the evolution of research interests over time.
3.5.2. Dominant Topic of Each Document
In LDA, each document is assumed to be composed of a mixture of topics. Consequently, the obtained from the LDA results allows us to determine the topic distribution for each document. In this study, the topic with the highest proportion in each document’s topic distribution is considered the dominant topic for that document [44]. We then calculate the dominant topic for each document and categorize them by subject to observe changes in the number of representative topics over time. The dominant topic for each document can be calculated using the following equation:
where is the dominant topic for document , and is the topic proportion of topic in document .
By analyzing the changes in the number of dominant topics over time, we can gain insights into the evolving trends within the subject areas.
4. Experimental Design
In this section, the data collection process for TF-IDF and LDA models is described, including the search period, search database, and search queries. The collected data are analyzed by categorizing them by year and subject, examining the changes in the number of published papers over the years and across different subjects. Additionally, the preprocessing steps for the collected data and the experiments for tuning LDA hyperparameters are discussed, resulting in the selection of the optimal hyperparameter combination.
4.1. Data Description
Data were collected from Scopus, encompassing research articles published over the past 20 years, from 2004 to 2023. To gather literature on multimodal logistics utilizing drones, the search was categorized into studies on the use of drones in conjunction with various transportation modes, including trucks and vehicles, ships, and robots. The search keywords for each mode of transportation were: (truck OR vehicle) AND drone AND (logistics OR delivery), ship AND drone AND (logistics OR delivery), robot AND drone AND (logistics OR delivery). The data collection process is illustrated in Figure 6. Each query was searched in Scopus, and duplicate records within each theme were removed. The resulting dataset, referred to as Data 1 in Figure 6, consisted of 2035 rows. Data 1 was then used to examine the changes in the number of publications over the years, as well as the changes in the number of publications by subject and year, as shown in Figure 7 and Figure 8. Since there were overlapping records within each subject in Data 1, 181 duplicate rows were removed, resulting in a dataset of 1854 rows, referred to as Data 2 in Figure 6. Data 2 was then used for data preprocessing, as described in Section 4.2, for the LDA model. For the analyses presented in Section 5.4 and Section 5.5, which involved further analysis of the LDA model results, the 181 deleted rows were restored, and further analysis was conducted on the complete dataset of 2035 rows.
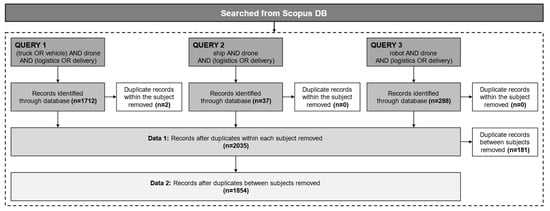
Figure 6.
Data collection process.
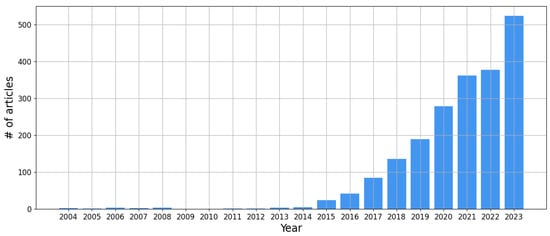
Figure 7.
Number of articles over the years.
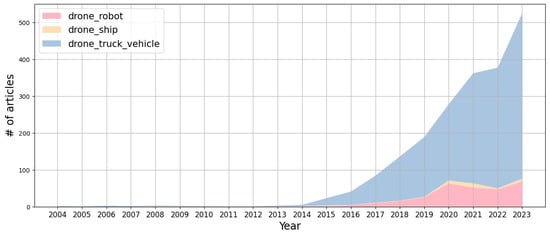
Figure 8.
Number of articles by subject over the years.
The annual changes in the number of collected articles are illustrated in Figure 7 below. Although there were some papers linking drones with broader applications as early as 2004, these early works primarily laid the technological and conceptual groundwork necessary for the field of drone-assisted multimodal logistics to develop. A notable increase in relevant publications began in 2015, with a significant surge observed in the most recent year, 2023. Given the foundational nature of early research and the substantial growth in later years, we chose to conduct a holistic analysis across the entire 20-year period. This approach allows us to capture the full evolution of the field, providing a comprehensive understanding of how drone-assisted multimodal logistics has developed over time.
The changes in the number of published articles by transportation mode over the years are illustrated in Figure 8 below. Most of the published articles focused on the integration of drones with trucks and vehicles, followed by studies on the integration of drones with robots and ships. Given the inherent characteristics of drones, such as their ease of application in inland transportation and their synergy with unmanned and automated systems, it can be inferred that more research has been conducted on the integration of drones with trucks, vehicles, and robots compared to that with ships.
4.2. Data Preprocessing
The data were preprocessed before being used in the LDA model. The preprocessing steps were as follows: First, the data collected from each transportation mode were examined for duplicate entries within each topic, and duplicates were removed to create a comprehensive dataframe. For the LDA model, only the columns Title, Abstract, Author Keywords, and Index Keywords were extracted.
Second, the extracted data were then tokenized using Python’s nltk package. To facilitate the interpretation of results, all words were converted to lowercase, and tokens that only consisted of numeric values were removed. Tokens consisting of a single character were also excluded. Additionally, lemmatization was performed to prevent identical words with different grammatical forms from appearing repeatedly in the results.
Lastly, English stopwords provided by the nltk package were removed. To prevent search query terms from influencing the TF-IDF keyword analysis, the search query terms and their related terms were also excluded. The excluded terms, along with the English stopwords, were as follows: “truck”, “vehicle”, “vehicles”, “robot”, “robots”, “ship”, “ships”, “drone”, “logistics”, “delivery”, “drones”, “uav”, “uavs”, “unmanned”, “aerial”.
4.3. LDA Model Hyperparameter Tuning
In this study, for tuning hyperparameters of the LDA model, K was set from 1 to 30, was set from 0.1 to 0.5, and was set from 0.01 to 0.05. After exploring a total of 750 combinations to observe the changes in coherence and perplexity values, the optimal combination of hyperparameters was chosen. Figure 9 illustrates a perplexity and coherence score of the optimal combination of and . The dotted lines in Figure 9 indicate the selected K value.
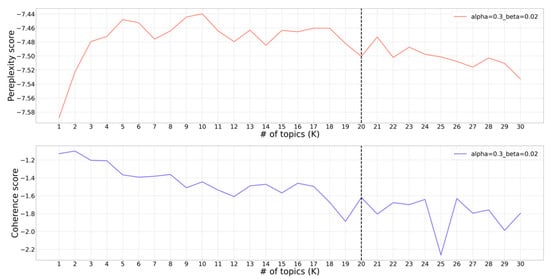
Figure 9.
Perplexity and coherence scores of α = 0.3, β = 0.02.
The upper graph of Figure 9 illustrates the perplexity scores of varying the value of , while the lower part depicts the coherence scores of varying the value of . This comprehensive analysis allowed us to identify the optimal combination of hyperparameters that yields the highest coherence and the lowest perplexity, ensuring the most interpretable and accurate topic model. The optimal combination of hyperparameters was determined to be .
5. Results and Analysis
In this section, the core keywords for each subject identified through TF-IDF are examined, and the differences in key terms across subjects are compared to analyze the characteristics of the papers in each subject area. Furthermore, using the results of the optimal hyperparameter combination selected from the hyperparameter tuning in Section 4.3, various research topics under the theme of D-ML are explored through the outcomes of the LDA model.
For more analysis, first, 20 topics are classified according to the characteristics of each topic. Secondly, the topic distribution for each document, obtained from the LDA model results, is averaged by year. Based on the sign of the trendline slope of the yearly average distribution values for each topic, the 20 topics are classified as hot topics or cold topics, providing a new perspective for analysis. Additionally, the topic with the highest probability in the topic distribution for each document is considered the dominant topic of that document. The changes in the number of dominant topics by year for each subject are analyzed to understand the trends and shifts in topics over time.
All experiments were conducted on an Apple M1 Pro with 16 GB RAM, utilizing the following versions of Python and associated packages: python: 3.9.13, pandas: 2.0.3, numpy: 1.25.0, scipy: 1.10.1, matplotlib: 3.8.2, nltk: 3.7, wordcloud: 1.9.2, gensim: 4.1.2, pyLDAvis: 3.4.0.
5.1. Identification of Prominent Keywords for Each Subject Based on TF-IDF Analysis
The collected literature was categorized into three subjects: drone–truck/vehicle, drone–ship, and drone–robot. To identify the most distinctive keywords for each subject, TF-IDF values were calculated, excluding common terms frequently encountered in academic papers. These excluded terms include “problem”, “system”, “research”, “paper”, “analysis”, “approach”, “based”, “model”, “application”, “data”, and “study”. This exclusion allows for a focused analysis of the keywords that are most indicative of each specific topic.
Drone–truck/vehicle subject: The analysis reveals that the most prominent keywords in this subject are “network”, “routing”, “algorithm”, and “optimization”. The prevalence of these terms indicates that research in this area predominantly focuses on routing and network optimization, particularly in the context of drones and vehicles, with a strong emphasis on the development of optimization techniques and algorithms. Additionally, keywords such as “last”, “mile”, “parcel”, “urban”, “traveling”, and “salesman” highlight a significant focus on last-mile delivery, parcel transportation, and urban logistics. The presence of terms like “military”, “medical”, “health”, “disaster”, “energy”, “environment”, and “security” suggests that this subject is explored across various application domains, setting it apart from the other two subjects.
Drone–ship subject: The key terms identified in this subject include “routing”, “simulation”, “optimization”, “algorithm”, “supply”, and “chain”. The prominence of “routing” indicates that the primary research focus is on routing issues involving the integration of drones with ships. The higher TF-IDF value for “simulation” compared to “optimization” or “algorithm” suggests a preference for simulation-based methodologies over exact optimization approaches in this field. The distinct appearance of “supply” and “chain” underscores the critical role of ships within the global supply chain, particularly in the context of international logistics.
Drone–robot subject: In this subject, the analysis highlights keywords such as “autonomous”, “technology”, “network”, “control”, “algorithm”, “COVID”, “19”, “pandemic”, “machine”, “learning”, “artificial”, and “intelligence”. The increased prominence of “autonomous”, “technology”, and “control” suggests that research within this domain is primarily concerned with the integration of drones into robotic automation, with a particular focus on control mechanisms and technological advancements. The inclusion of “COVID”, “19”, and “pandemic” reflects the recent surge in interest in drone–robot collaboration driven by the need for contactless delivery solutions during the COVID-19 pandemic. Additionally, the combination of “algorithm” with “machine”, “learning”, “artificial”, and “intelligence” indicates a growing emphasis on artificial intelligence (AI)-based algorithms to optimize operations in this subject area.
5.2. Discovering Topics
By using the pyLDAvis package in Python, as referenced in [45], the results obtained from pyLDAvis are illustrated in Figure 10. When a topic is selected from the top of Figure 10a, detailed information regarding that topic is displayed as shown in Figure 10a,b. Figure 10 provides an example of the results when Topic 1 is selected.
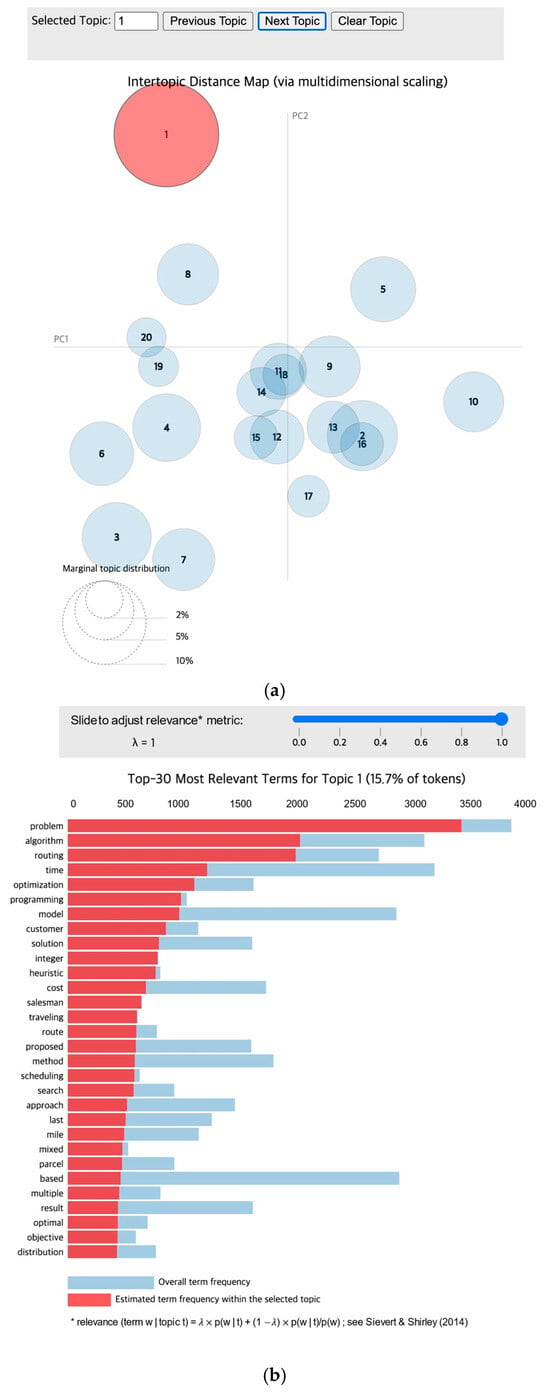
Figure 10.
Result of pyLDAvis: (a) Intertopic distance map. (b) Top 30 most relevant terms of topic. (Relevance in figure can be found in detail, including formulas and explanations, in reference [45]).
In Figure 10a, the size of the circle representing the selected topic indicates the proportion of that topic within the corpus. For instance, as shown in Figure 10a, Topic 1 has the largest circle among the 20 topics, suggesting that it occupies the largest proportion within the corpus. Furthermore, its non-overlapping position with other topics on the graph implies that Topic 1 is likely contextually independent from the other topics.
Figure 10b provides the top 30 keywords that constitute the selected topic, enabling the assignment of labels to each topic based on these results. The ranking of keywords can be adjusted using slider at the top of Figure 10b. When , the keywords are ranked according to the word distribution () of the topic, and the red bars are displayed in descending order based on their width. The bar chart in Figure 10b can be interpreted as follows: the blue bars represent the frequency of the keywords across the entire corpus, while the red bars represent the frequency of the keywords within the selected topic. Therefore, by examining the proportion of the red bar relative to the blue bar, one can identify the key terms for the selected topic. In Topic 1, the terms “problem”, “algorithm”, and “routing” show the highest relevance. However, for the terms “programming”, “integer”, and “heuristic”, the red bars occupy almost the entire width of the blue bars, indicating that these three terms appear almost exclusively in Topic 1 and are therefore significant in interpreting Topic 1.
Each topic was named based on the top 15 keywords visualized by pyLDAvis. Table 1 below shows the top 15 keywords for each topic, along with the assigned topic name. As explained earlier in Section 4.2, the texts were preprocessed through lemmatization using the Python nltk package before being applied to the LDA model. Consequently, words in their lemmatized forms, such as “ha” and “wa”, appear in the results in Table 1. This outcome is closely related to the lemmatization rules employed by the WordNetLemmatizer() in the nltk package. When performing lemmatization, the nltk package utilizes the WordNet database, which includes verbs, nouns, and other parts-of-speech (POS), to convert plural forms to singular and past tense forms to present tense. During this process, it often follows general rules such as removing “-s” or “-es” for pluralization and “-ed” or “-d” for past tense conversion [46]. Therefore, incomplete forms like “ha” and “wa” appear in Table 1. Additionally, the WordNetLemmatizer() in the nltk package defaults to treating words as nouns unless the user accurately tags the part of speech for each word in advance. As a result, words such as “using”, “used”, and “based” are recognized as nouns and consequently appear unchanged in the keywords listed in Table 1.

Table 1.
Top 15 keywords and the name of each topic.
Topic 1: Routing problem. The routing problem of drones has predominantly been studied in conjunction with trucks. A notable example of such integrated routing problems involving drones and trucks/vehicles is the Flying Sidekick Traveling Salesman Problem (FSTSP), and various studies have proposed different algorithms to solve FSTSP. For instance, in [19], a heuristic algorithm was proposed to solve the FSTSP in which a drone is loaded in the truck and launched from the truck to deliver to eligible customers. Routing problems are being solved not only in the drone–truck/vehicle subject but also in the drone–ship subject. For example, in the work of [47], the Mothership-Drone Routing Problem (MDRP) is addressed when the drone departs from the mothership, visits a target location, and then returns to the mothership for refueling.
Topic 2: Communication network. A communication network encompasses all types of data transmission networks, including ad-hoc networks, which can be used without needing prior configuration or being fixed in a single location [48]. There are two types of wireless networks, which are Wireless Ad-Hoc Networks (WANETs) and Mobile Ad-Hoc Networks (MANETs). MANETs are defined as networks where mobile devices autonomously form a network without relying on fixed infrastructure. Specifically, MANETs can be further categorized into Vehicular Ad-Hoc Networks (VANETs), which are a specialized form of MANETs designed for predefined roads [49]. VANETs encompass three main communication methods: Vehicle-to-Vehicle (V2V), Vehicle-to-Infrastructure (V2I), and hybrid communication [50]. Furthermore, there are extensions such as Drone-assisted VANETs, which integrate drones into VANETs [51], and Flying Ad-Hoc Networks (FANETs), which are a specific type of MANET and VANET that facilitate ad-hoc networking among UAVs.
Topic 3: Health care. Drones can handle a wide variety of items, from frequently used parcels to small-scale goods, as long as loading weight constraints are observed. Among the various items that drones can handle, pharmaceuticals are particularly noteworthy. Drones are appealing for medical deliveries due to their swift response times and their capability to traverse otherwise inaccessible terrain [52]. Drones can be utilized not only for the transportation of pharmaceuticals but also for delivering lab specimens to hospitals. Additionally, they can be employed as dedicated drones for responding to medical emergencies, such as being equipped with integrated Automated External Defibrillators (AEDs) and tools for Cardiopulmonary Resuscitation (CPR) assistance [53,54].
Topic 4: Service supply chain. Service supply chains can be broadly categorized into Service Only Supply Chains (SOSCs), which consist purely of services such as telecommunication and tourism, and Product Service Supply Chains (PSSCs), which consider both physical products and significant service elements. Logistics service providers fall under the PSSCs category [55]. In PSSCs, drones are utilized not only for last-mile delivery but also for various applications such as inventory management within warehouses [56,57] and warehouse inspection [58,59].
Topic 5: Communication protocol. A communication protocol comprises rules that facilitate information exchange between multiple entities in a communication system, leveraging a channel or physical medium to transmit data [60]. Various communication protocols have been proposed for different communication networks. For example, the Micro Air Vehicle (MAV) Link protocol, an open-source communication protocol, was released in 2009 [61]. Security is paramount in communication protocols due to their role in data transmission and information exchange, prompting extensive research to enhance protocol security [50,62]. This need for secure communication protocols is particularly evident in the context of drones, which are susceptible to security attacks [63,64,65].
Topic 6: Urban logistics/last-mile delivery. Drones, characterized by their ability to operate without the constraints of road infrastructure, are not affected by traffic congestion. This makes them an innovative transportation method for urban logistics, particularly for last-mile delivery [66], where drones are gathering significant attention.
Topic 7: Research/application review. As a key technology of Industry 4.0, drones play a significant role in the logistics sector [67], and various review studies have been conducted from different perspectives. There are reviews focusing solely on drones themselves [68,69], as well as reviews on drone-integrated routing [70] and optimization for the integration of drones with trucks [14], drone-assisted delivery methods [10], and drones in disaster management [71].
Topic 8: Battery charging. One of the most essential elements in the operation of drones is the battery. The weight and charging capacity of the battery not only affect the range and duration of drone flights but also play a significant role in determining the overall efficiency of drone operations. Drones necessitate essential facilities such as stations for refueling and battery replacement. Consequently, various studies have been conducted in this context, including the optimization of charging station networks [72,73], the scheduling optimization of drone visits to charging stations [74], and the concurrent optimization of drone flight mission planning and recharging [75].
Topic 9: Learning-based decision. Incorporating learning-based decision-making algorithms into drones not only enhances drones’ ability to navigate complex environments autonomously but also enables them to adapt to dynamic conditions and optimize their flight paths in real time. In various aspects of drone operation, decision-making can be enhanced using learning-based algorithms. For instance, Deep Reinforcement Learning is used to avoid obstacles and navigate drones [76], and Logistic Regression and Linear Discriminant Analysis are used to build UAV fault detection mode [77].
Topic 10: Drone-based detection. Drones must be designed to detect and avoid obstacles, such as people and objects, in real time to ensure safe operation during flight. This involves not only technical studies utilizing radar and lidar technologies [78,79] but also research on real-time object detection algorithms, such as Convolutional Neural Networks (CNNs) [80,81].
Topic 11: Swarm. Drone swarms offer the advantage of performing complex tasks more efficiently and at a lower cost compared to single drones, especially in challenging environments. These swarms can be utilized not only for cargo delivery [82,83] but also for military and warfare applications [84], wildfire management, and city/asset monitoring [85,86]. However, to ensure the stable operation of drone swarms, it is crucial to establish a reliable network communication system [85]. Additionally, controlling [86] and routing [87] of the drone swarms are emerging as significant challenges that need to be addressed.
Topic 12: Aircraft/airspace. Although drones are actively researched for last-mile delivery, their operational feasibility is influenced by airspace regulations and the development of civil aviation policies. In the work of [66], a framework for evaluating the impact of UAV flight regulations and policies on last-mile delivery operations in urban and rural areas is proposed. Additionally, Unmanned Aircraft Systems Traffic Management (UTM) is crucial for drone delivery as it ensures the safe sharing of flight information and efficient use of airspace for Beyond Visual Line of Sight (BVLOS) operations. Consequently, the Federal Aviation Administration (FAA) and the European Union (EU) have released their respective Concept of Operations (ConOps) for UTM (FAA ConOps) and for UAS targeting a UTM concept called U-space (CORUS ConOps), respectively. These documents define the structure of airspace and performance requirements for drone operations, considering various factors such as drone traffic density and airspace access [88].
Topic 13: Security. As drones are increasingly utilized across various sectors and drone technology advances rapidly, security issues such as cyber-attacks have concurrently emerged [89,90]. The academic community is also focusing on these security concerns of drones. For instance, in the work of [89], the security issues of drones are categorized into four levels: hardware, software, communication, and sensor. Research utilizing blockchain technology has emerged to address these security challenges associated with drones [91,92].
Topic 14: Traffic/transportation. As drones are increasingly utilized in various social applications, their significance is growing. In the logistics sector, drones are gaining attention as a novel method for parcel delivery, although limitations related to battery life and capacity still exist. To address these limitations, a method where drones could travel by riding on the roofs of public transportation vehicles was proposed [93]. Furthermore, for the realization of the drone delivery concept, the design of urban airspace is necessary. Various metrics, such as drone traffic density and traffic distribution patterns, can be employed for this purpose [94,95].
Topic 15: Manufacturing plant. The use of drones extends to manufacturing plants that produce lightweight products. For instance, drones are employed in the logistics flow within factories that mass-produce lightweight items, particularly for transporting raw materials or semi-finished products. Unlike traditional methods such as conveyor belts or trucks that are confined to floor-level transport, and even the increasingly popular AGVs, drones have the distinct advantage of utilizing 3-dimensional space for transport. This capability allows drones to contribute to more efficient and productive logistics operations within the factory [96].
Topic 16: Sensor/sensing. Drones, due to their capability of being remotely operated without a pilot, can access virtually any location feasible for flight. Leveraging this characteristic, numerous studies have explored the use of drones equipped with various sensors for detection and monitoring across different domains. For instance, drones equipped with Cadmium Zinc Telluride (CZT) sensors have been used for detecting nuclear and radiological risks [97,98]. Drones can be equipped with electromagnetic spectrum sensors and gamma-ray sensors for atmospheric observation. Additionally, they can utilize biological sensors for detecting airborne microorganisms and chemical sensors for analyzing element concentrations [99].
Topic 17: Control/controller. Drones can be operated primarily through a control system or a Ground Control Station (GCS). In the control system method, the user monitors and controls the drone via a camera installed on the drone. In the GCS-based method, the drone is connected to a computer using software, allowing it to execute mission commands uploaded by the user [63].
Topic 18: Trajectory/propeller. To ensure the safe operation of drones, it is crucial to design the propellers, which are the most important component in drone flight, to be stable and durable. Consequently, several studies have proposed propeller designs that are deformable and produce less noise by mimicking nature [100,101]. Furthermore, trajectory planning, along with charging and security, is one of the three key factors in drone routing [102]. Designing an optimal path that maximizes energy efficiency within the constraints of the drone’s limited battery capacity and flight time is a critical issue. To address this, research has been conducted to track the drone’s trajectory [33] and predict the flight time required to complete a planned trajectory using machine learning methods [103].
Topic 19: Disaster/humanitarian. Drones are utilized for delivering emergency relief supplies, blood, medicines, and essential goods to people stranded in hazardous areas during disasters and natural calamities [104]. Particularly, drones have the advantage of delivering necessary items without requiring direct human access to these dangerous regions, as long as flight is feasible. Consequently, drones are gaining attention as a key aspect of humanitarian logistics.
Topic 20: Energy consumption. For the efficient operation of drones, energy consumption, along with battery capacity, is a crucial factor. Energy consumption is a significant limitation for drone delivery operations to realize their full potential in offering rapid delivery, lowering costs, and reducing emissions [105].
5.3. Classification of 20 Topics
According to the characteristics of each topic, 20 topics can be classified into applicable domain fields, operational/technical elements, and research trend analysis, as shown in Table 2.
Table 2.
Classification of 20 topics.
The applicable domain fields can be further subdivided into logistics (Topic 4 (Service supply chain), Topic 6 (Urban logistics/last-mile delivery), Topic 14 (Traffic/transportation)), medical/humanitarian (Topic 3 (Health care), Topic 19 (Disaster/humanitarian)), and indoor logistics (Topic 15 (Manufacturing plant)).
The operational and technical elements are categorized into Energy/Battery management (Topic 8 (Battery charging), Topic 20 (Energy consumption)), Communication/Networking (Topic 2 (Communication network), Topic 5 (Communication protocol)), Routing/Trajectory optimization (Topic 1 (Routing problem), Topic 18 (Trajectory/propeller)), Security (Topic 13 (Security)), Regulations (Topic 12 (Aircraft/airspace)), Sensing/Detection (Topic 10 (Drone-based detection), Topic 16 (Sensor/sensing)), and Autonomous decision/Control system (Topic 9 (Learning-based decision), Topic 11 (Swarm), Topic 17 (Control/controller)). Research trend analysis includes Topic 7 (Research/application review).
Table 2 demonstrates that D-ML is being applied across various domains. The inclusion of medical transportation and humanitarian logistics in the applicable domain fields indicates that the integration of drones and multimodal systems is being considered not only for urban/supply chains but also for a broader range of applications.
Furthermore, a variety of operational and technical elements required for the operation of drones in conjunction with multimodal systems are included as topics. These range from optimization and algorithm-related subjects, such as routing optimization and learning-based decision making, to regulations and engineering topics, including sensing, detection, control, and energy management.
However, for the logistics involving drones within multimodal systems to become more prevalent, research must go beyond individual topics and consider the integration of multiple subjects. For instance, technical challenges remain in combining various elements, such as optimizing routing and charging station networks while considering drone regulations or establishing communication protocols that enhance security between drones and multimodal modes. These integrated research efforts are essential for advancing the field.
5.4. Identifying Hot and Cold Topics
A hot topic is defined as one where the trendline of the average yearly topic distribution per document has a positive slope, while a cold topic is one where the trendline has a negative slope. Table 3 below presents the topics classified as hot or cold topics. The annual average proportion values for each topic were calculated using Equation (10). Among the total 20 topics, 14 were classified as hot topics and 6 as cold topics. Statistically significant hot and cold topics were 10 and 1, respectively, all significant at the 0.05 level.
Table 3.
Hot and cold topics.
5.4.1. Hot Topics
The hottest topic was Topic 1 (Routing problem), likely due to the increasing importance of developing new frameworks for routing in various multimodal modes involving drones. Among the multimodal modes set in this study (truck/vehicle, ship, robot), the routing research for truck/vehicle and drones is the most actively conducted. This can be attributed to the necessity of efficient routing strategies to optimize drone operations within these modes.
The classification of Topic 4 (Service supply chain), Topic 6 (Urban logistics/last-mile delivery), and Topic 15 (Manufacturing plant) as hot topics can be attributed to the versatility of D-ML across the entire supply chain, as defined in Section 2. Specifically, drones are increasingly recognized for their potential to enhance the efficiency of inland transportation by overcoming road infrastructure limitations or congestion and enabling 3-dimensional delivery operations. This capability not only improves the effectiveness of last-mile delivery and urban parcel distribution, which represent the final stages of the supply chain but also facilitates the transportation of raw materials and semi-finished goods within manufacturing plants. These factors have driven significant attention towards these topics, contributing to their classification as hot topics.
Particularly for Topic 6 (Urban logistics/last-mile delivery), the trend aligns closely with recent industrial developments, where several logistics companies are actively building last-mile delivery systems utilizing drones [106,107]. This further underscores the relevance of this topic in the current industrial landscape.
The classification of Topic 5 (Communication protocol) and Topic 13 (Security) as hot topics can be attributed to the critical need to address various security challenges associated with D-ML in order to facilitate its widespread adoption. Ensuring the secure operation of drones in logistics systems is essential, and this has garnered significant attention from the academic community. This is important because one of the obstacles hindering the adoption of logistics drones is the threat to personal privacy and security concerns [33]. Similarly, security issues in drones are critical barriers that must be overcome to promote the adoption of drones in the logistics sector. When implementing drones in logistics, it is essential to enhance the security framework of the communication network due to the data transmission involved. Re-examining this from a technological advancement perspective, as explained in Section 5.2, several studies have proposed communication protocols to enhance drone security [50,62,63,64,65]. For D-ML to be more widely adopted, particularly in urban/last-mile delivery, where drone adoption is actively progressing, the potential for massive data collection during deliveries to customers [33,108] requires that security enhancements be considered in both the synchronous and independent modes of drone delivery systems described in Section 2.1.
The classification of Topic 3 (Health care) and Topic 19 (Disaster/Humanitarian) as hot topics can be attributed to the advantages of drone-based delivery. In medical emergencies or disaster scenarios, the most critical factor is the speed of delivery when transporting medical supplies, blood, or relief goods to affected areas. Drones offer the benefit of bypassing road traffic and accessing areas that are otherwise unreachable due to disasters, allowing for the rapid delivery of essential items, as explained in Section 5.2. This aligns with the growing trend of utilizing drones for humanitarian logistics.
Topic 10 (Drone-based detection) and Topic 9 (Learning-based decision) have been classified as hot topics due to the increasing ability to collect diverse data using drones and the advancements in computing resources, which enable the application of complex methodologies like machine learning, deep learning, reinforcement learning, and deep reinforcement learning. The ability of drones to gather real-time data during operations and to make real-time decisions based on this data is becoming central to the operation of D-ML, thus increasing interest in these areas.
Finally, the classification of Topic 20 (Energy consumption) and Topic 8 (Battery charging) as hot topics is driven by the fact that drone energy consumption, battery charging, and management are directly tied to the operational efficiency of D-ML, especially when drones are integrated with trucks/vehicles, ships, and robots. These issues are critical for the widespread adoption and expansion of D-ML, which has garnered significant attention from researchers. Since the operational efficiency of drone delivery is determined by battery energy consumption, various research topics are emerging. These include the development of VRP models considering drone energy consumption for drone delivery [109], optimization of the charging station network for drone delivery [73], and the optimization of charging station relocation for services where drones use public transportation to travel near delivery areas before completing deliveries [110], similar to the synchronous mode described in Section 2.1.
5.4.2. Cold Topics
Topics classified as “cold” were not those with minimal presence in the corpus but rather those exhibiting a marked decline in their frequency of occurrence over the observed period [42]. The coldest topic was Topic 14 (Traffic/Transportation). The classification of Topic 14 (Traffic/transportation) as the coldest topic can be inferred as follows: In the logistics field, the terms “traffic” and “transportation” are primarily used to refer to linehaul operations. However, due to the loading weight constraints and operational efficiency of drones, they are predominantly utilized for last-mile delivery or in urban environments rather than for linehaul operations. Therefore, it is hypothesized that Topic 14 (Traffic/transportation) is classified as the coldest topic.
Although the other topics were not statistically significant, Topic 11 (Swarm) was classified as a cold topic, following Topic 14 (Traffic/Transportation) with the next smallest slope. This can be attributed to the economic burdens and technical limitations associated with applying drone swarms to D-ML. For D-ML to be more widely adopted in the future, the size of drone fleets must increase to enable operations over larger networks. This would require significant advancements in drone swarm research. However, as the number of drones increases, so do the technical and operational complexities, as well as the associated economic costs. These factors likely contribute to Topic 11 (Swarm) being classified as a cold topic, as it has not yet garnered significant attention.
5.5. Dominant Topic over the Years
The dominant topic can be inferred from the topic distribution generated for each document by LDA. In other words, the dominant topic of a document is the topic with the highest probability in the topic distribution of that document. After determining the dominant topic for each document, the changes in topics over the years can be analyzed by categorizing them by subject, as illustrated in Figure 10 below. Figure 11 presents the number of published articles over the years, with the x-axis representing the years and the y-axis representing the number of published articles. The color coding indicates the dominant topic of each article. This visualization allows us to understand the number of published articles on each D-ML topic from 2004 to 2023, as well as the changing trends in the dominant topics of these articles.
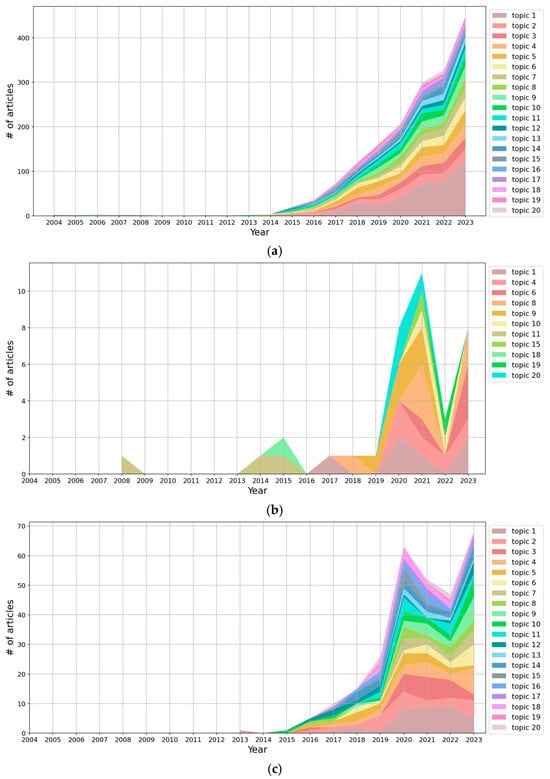
Figure 11.
Dominant topics over the years. (a) Drone–truck/vehicle, (b) drone–ship, (c) drone–robot.
5.5.1. Dominant Topics in the Drone–Truck/Vehicle Subject over the Years
Figure 11a illustrates the changes in the dominant topics of documents related to the drone–truck/vehicle subject over the years. Among the three subjects, this subject has the highest number of documents, and consequently, the distribution of dominant topics per document is more diverse compared to Figure 11b. Although there were some papers as early as 2004, their presence was minimal until 2014. From 2015 onwards, the number of papers has been steadily increasing, reaching up to 2023. This indicates that among the three subjects, research on the application of drones in truck/vehicle logistics has been the most actively pursued.
Notably, 2015 was a significant year, as the FAA proposed regulations to integrate small UAS (under 55 pounds) into the U.S. civil aviation system, addressing safety rules, operator certification, and operational limits [111]. Additionally, it was the year of the first government-approved use of UAS for transporting medical supplies [112]. This regulatory support and milestone event likely contributed to the surge in research and publications in this area.
Since 2015, the most prominent topic has been Topic 1 (Routing problem), consistently increasing in number. Most other topics, except for Topic 1, have also seen a steady rise since 2015. This indicates that much of the research applying drones to truck/vehicle logistics focuses on establishing the routing required for integrating drones with trucks/vehicles.
Indeed, both synchronous and independent modes of drone-assisted truck logistics, summarized in Section 2.1, involve routing studies. For instance, in the synchronous mode, a model combining the Vehicle Routing Problem with Drones (VRPDs) and drone speed selection in the synchronous mode [113] and a model for the humanitarian vehicle routing problem with synchronized drones (HVRP-SDs) considering time-varying weather conditions [114] have been introduced. In the independent mode, VRPD and its extended models [115] and a model for the independent mode, which is divided into two echelons: main depot-truck and truck–drone, have been developed [116]. In the work of [116], the model considers the capacities of both drones and trucks and aims to minimize the total return time to the depot for both drones and trucks after completing deliveries.
Since the subject of drone–truck/vehicle logistics frequently involves the application of drones in truck deliveries, particularly for last-mile delivery, many studies have integrated various topics with Topic 1 (Routing problem). In addition to research focusing solely on specific topics, such as Topic 8 (Battery charging) within the context of drone–truck/vehicle logistics [110], numerous studies have explored these topics in conjunction with Topic 1 (Routing problem). For instance, drone–truck delivery by considering both Topic 1 (Routing problem) and Topic 20 (Energy consumption) has been examined [117]. Similarly, the integration of Topic 1 (Routing problem) and Topic 9 (Learning-based decision) by using deep reinforcement learning to solve the VRPD [118]. This pattern indicates that within the drone–truck/vehicle domain, research predominantly centers around Topic 1 (Routing problem) while integrating it with other topics, resulting in more specialized subtopics.
Therefore, future research should aim to combine a broader range of topics to more comprehensively explore the complex dynamics of drone–truck/vehicle logistics. This would facilitate a deeper understanding and optimization of the various facets involved in this field.
5.5.2. Dominant Topics in the Drone–Ship Subject over the Years
Figure 11b illustrates the annual changes in dominant topics within the drone–ship subject. Although the number of papers is relatively small, there is a continuous effort to apply drones in maritime logistics. Until 2019, the presence of such papers was minimal, but there was a significant increase in 2020. Considering the outbreak of COVID-19 during this period, it can be inferred that as the virus spread globally, many port workers and others were infected, leading to delays in operations due to medical treatment and quarantine. This increase in human and operational risks within the maritime industry [119] highlighted the need for unmanned and automated logistics systems utilizing contactless technologies like drones.
Since 2019, notable topics within the Drone–ship subject have included Topic 1 (Routing problem), Topic 4 (Service supply chain), Topic 6 (Urban logistics/last-mile delivery), Topic 8 (Battery charging), Topic 9 (Learning-based decision), and Topic 20 (Energy consumption). As explained in Section 2.2, ships primarily transport cargo in containers in large quantities, and thus, research has focused more on the integration of drones with shore and hinterland logistics rather than between ships. For instance, a ship to shore delivery model using the case of Trinidad [119] and a ship to shore trajectory planning approach aimed at improving the efficiency of transportation systems by using drones to deliver parcels to sea vessels [120] were proposed.
In the industry, several examples of integrating drones with ships can be found. Airbus, in collaboration with Wilhelmsen Ships Services and the Maritime Port Authority of Singapore, has used drones to deliver packages to ships anchored offshore. Similarly, Wilhelmsen Ship Service significantly reduced costs by transporting spare parts and documents via drones [121]. Beyond ship to shore deliveries, drones are also utilized for port inspection tasks. For instance, a survey among port industry stakeholders has revealed that approximately 52% of respondents believe it is feasible to introduce autonomous drones for port inspections within the next three years [122]. Additionally, drones can be utilized for port geography monitoring, inspection, and anticipatory risk monitoring [123].
Although research integrating drones and ships has not been extensively conducted, it can be inferred that this is a field with high potential for synergy. Thus, further studies, particularly those related to Topic 10 (Drone-based detection), Topic 13 (Security), and Topic 16 (Sensor/sensing), are necessary to explore these applications comprehensively.
5.5.3. Dominant Topics in the Drone–Robot Subject over the Years
Figure 11c illustrates the yearly trends in dominant topics within the drone–robot subject. The first related paper appeared in 2013, and similar to the drone–truck/vehicle domain, a diversification in topics has been observed since 2015.
Notably, there was a significant surge in the number of publications in 2020. This surge can be associated with the emergence of terms like “covid”, “19”, and “pandemic” in the TF-IDF result and the onset of the COVID-19 pandemic in December 2019. It can be inferred that the COVID-19 pandemic has heightened interest in unmanned delivery and automation, leading to an increase in research on integrating drones with robots.
Since 2019, the most significant increase has been observed in Topic 1 (Routing problem). However, in the most recent year, 2023, its relative proportion has decreased, with more research being distributed across other topics such as Topic 2 (Communication network), Topic 4 (Service supply chain), Topic 6 (Urban logistics/last-mile delivery), and Topic 9 (Learning-based decision). Additionally, in 2023, there has been a notable decline in the proportions of Topic 3 (Health care), Topic 5 (Communication protocol), Topic 11 (Swarm), Topic 13 (Security), Topic 17 (Control/controller), Topic 18 (Trajectory/propeller), Topic 19 (Disaster/humanitarian), and Topic 20 (Energy consumption). This indicates that the most recent research on integrating drones with robots is predominantly focused on PSSCs, urban logistics, and last-mile delivery, often leveraging AI algorithms such as machine learning and deep learning.
Although a comparison of the number of papers on the drone–truck/vehicle subject (Figure 11a) and the drone–robot subject (Figure 11c) indicates that more studies apply drones to the truck/vehicle mode than integrating drones with robots, this does not necessarily imply that the truck/vehicle mode is more suitable for drone applications. In less densely populated areas, such as suburban regions, the synchronous or independent modes of drone-assisted truck logistics are effective in reducing operational costs. Conversely, in densely populated urban centers, using Autonomous Delivery Vehicles (ADVs) in conjunction with drones is more appropriate for cost reduction [116]. Therefore, it is essential to consider the optimal operational strategy tailored to each specific context when integrating drones with trucks/vehicles versus robots.
Although the relative importance of Topic 5 (Communication protocol), Topic 11 (Swarm), Topic 13 (Security), and Topic 20 (Energy consumption) has diminished recently, there is still a need to enhance research on issues such as battery management in drone–ADVs-integrated logistics systems, the formation of networks with larger drones (drone swarms) and ADVs, and the establishment of robust real-time communication systems and security protocols between drones and ADVs. In particular, further research is needed to improve battery efficiency, optimize network formation processes, ensure communication stability, and enhance security in these integrated systems.
6. Conclusions
In this paper, we proposed a unified and structured classification framework to systematically analyze research trends and topics in a wide range of D-ML studies using TF-IDF, LDA, and Collapsed Gibbs Sampling techniques. We classified multimodality into three categories: drone–truck, drone–ship, and drone–robot. Utilizing our proposed classification, we comprehensively reviewed and synthesized the extant research—comprising 2035 articles from 2004 to 2023—on D-ML.
Twenty key topics in general D-ML were derived and classified by their characteristics, such as applicable domain fields, operational/technical elements, and research trend analysis. The topic distribution, obtained from the LDA model results, was calculated by year, and hot or cold topics were identified based on the trendline slope of the yearly average distribution values for each topic. Additionally, we provided a deeper look at each category to identify dominant topics by year and analyzed trends and shifts over time. To the best of our knowledge, this is the first paper to propose a detailed classification framework and review of D-ML using text mining methodologies.
In short, based on our proposed classification framework, we identified key topics in the extant literature, conducted a comprehensive review of these topics, and provided detailed discussions on the dominant themes within each category to infer future research directions. Our key findings are summarized as follows:
- Drone-assisted truck logistics
Current research trends: Current research in drone-assisted truck logistics focuses on two operational modes: synchronous and independent. In the synchronous mode, trucks and drones operate in tandem to complete deliveries, with trucks serving as mobile depots from which drones are deployed. Key research areas include optimizing deployment points, ensuring battery life, coordinating truck routes, and balancing load capacities. The independent mode involves trucks and drones operating from a central depot, delivering items independently but with coordinated scheduling. Studies in this mode explore efficient allocation, route optimization, and the integration of drones into existing truck-based systems to enhance delivery speed and efficiency.
Future research topics: Future research may focus on advanced optimization algorithms for dynamic routing and scheduling, improved battery and energy management systems, and the development of more robust coordination mechanisms between drones and trucks. Additionally, addressing regulatory challenges, enhancing safety protocols, and developing standardized communication systems between drones and trucks are critical areas for future exploration. Investigating the environmental impacts and sustainability of integrating drones with truck logistics also holds significant potential.
- Drone-assisted maritime logistics
Current research trends: Research in drone-assisted maritime logistics leverages drones to enhance last-mile delivery from ships to coastal or remote areas. Key trends include using drones for navigating congested port areas, improving loading and unloading efficiency with innovative methods like the SPM, and facilitating ship-to-ship deliveries without docking. Companies such as Maersk Tanker and the U.S. Navy have conducted tests demonstrating the feasibility of drones for maritime logistics, emphasizing operational efficiency and continuous operation benefits.
Future research topics: Future research should explore the integration of drones with maritime logistics on a larger scale, focusing on enhancing drone capabilities for longer distances and heavier payloads. Innovations in autonomous navigation systems, robust communication networks for ship-to-shore and ship-to-ship interactions, and safety certifications for maritime environments are crucial. Further studies on the economic impacts, potential cost savings, and environmental benefits of drone-assisted maritime logistics are also essential.
- Drone-assisted robot logistics
Current research trends: The integration of drones with ADVs represents a significant frontier in logistics. Current research focuses on the synergies between drones and ground robots, leveraging their respective strengths in payload capacity, range, and speed. Studies explore synchronization mechanisms, efficient task allocation, and robust communication protocols between drones and ADVs. Initial attempts have shown promising results, with drones overcoming obstacles for ADVs and enhancing overall delivery efficiency.
Future research topics: Future research will likely address challenges in synchronizing drone and ADV operations, developing advanced obstacle detection and avoidance algorithms, and securing regulatory approvals for integrated systems. Enhancing battery efficiency, optimizing network formations, and improving real-time communication stability between drones and ADVs are critical areas. Additionally, exploring the use of AI, such as machine learning and reinforcement learning, for dynamic route optimization will be vital for advancing drone-assisted robot logistics.
While we have proposed a coherent classification framework and identified evolving research trends and issues in D-ML, further investigation is required to elucidate the underlying factors driving these trends and issues. Although we briefly touched on this within our paper, a deeper examination of pivotal industry events, key technological advancements, and seminal papers that have contributed to the growing relevance of D-ML would be beneficial. Additionally, based on these underlying factors, developing a roadmap for future D-ML systems is essential. Our results primarily focus on technological and service aspects, but they are limited by regulatory disparities across countries, which warrant further exploration.
Future research could benefit from employing more advanced topic modeling techniques that build upon basic LDA, potentially yielding more refined and accurate results. Additionally, if further in-depth analysis is conducted by incorporating detailed case studies for each mode of D-ML defined in this study or by including empirical data on 20 topics, it is expected that the text-mining analysis results of this study will be substantiated.
Author Contributions
Conceptualization, K.K. and H.J.; methodology, K.K. and S.K.; software, K.K.; validation, J.K., S.K. and H.J.; formal analysis: K.K., S.K. and H.J.; data curation, K.K.; writing—original draft preparation, K.K., S.K. and J.K.; writing—review and editing, H.J.; supervision, H.J.; funding acquisition, H.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF), funded by the Ministry of Education, Science and Technology (NRF-2020R1F1A1070790). This work was also supported by the INHA UNIVERSITY Research Grant (68020).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Cornell, A.S.M.; Reidel, R. Commercial Drone Deliveries Are Demonstrating Continued Momentum in 2023. 6 October 2023. Available online: https://www.mckinsey.com/industries/aerospace-and-defense/our-insights/future-air-mobility-blog/commercial-drone-deliveries-are-demonstrating-continued-momentum-in-2023 (accessed on 2 August 2024).
- Federal Aviation Administration. Package Delivery by Drone (Part 135). 17 March 2023. Available online: https://www.faa.gov/uas/advanced_operations/package_delivery_drone (accessed on 2 August 2024).
- Kim, J.; Moon, H.; Jung, H. Drone-Based Parcel Delivery Using the Rooftops of City Buildings: Model and Solution. Appl. Sci. 2020, 10, 4362. [Google Scholar] [CrossRef]
- Amazon. Amazon Drone Delivery Is Coming to Arizona. 22 April 2024. Available online: https://www.aboutamazon.com/news/transportation/amazon-drone-delivery-arizona (accessed on 2 August 2024).
- Jung, H.; Kim, J. Drone Scheduling Model for Delivering Small Parcels to Remote Islands Considering Wind Direction and Speed. Comput. Ind. Eng. 2022, 163, 107784. [Google Scholar] [CrossRef]
- Lu, F.; Jiang, R.; Bi, H.; Gao, Z. Order Distribution and Routing Optimization for Takeout Delivery under Drone–Rider Joint Delivery Mode. J. Theor. Appl. Electron. Commer. Res. 2024, 19, 774–796. [Google Scholar] [CrossRef]
- Sun, X.; Fang, M.; Guo, S.; Hu, Y. UAV-Rider Coordinated Dispatching for the On-Demand Delivery Service Provider. Transp. Res. Part E Logist. Transp. Rev. 2024, 186, 103571. [Google Scholar] [CrossRef]
- Li, Y.; Liu, M.; Jiang, D. Application of Unmanned Aerial Vehicles in Logistics: A Literature Review. Sustainability 2022, 14, 14473. [Google Scholar] [CrossRef]
- Eskandaripour, H.; Boldsaikhan, E. Last-Mile Drone Delivery: Past, Present, and Future. Drones 2023, 7, 77. [Google Scholar] [CrossRef]
- Li, X.; Tupayachi, J.; Sharmin, A.; Ferguson, M.M. Drone-Aided Delivery Methods, Challenge, and the Future: A Methodological Review. Drones 2023, 7, 191. [Google Scholar] [CrossRef]
- Rejeb, A.; Rejeb, K.; Simske, S.J.; Treiblmaier, H. Drones for Supply Chain Management and Logistics: A Review and Research Agenda. Int. J. Logist. Res. Appl. 2023, 26, 708–731. [Google Scholar] [CrossRef]
- Udo, E.; Huaccho Huatuco, L.; Ball, P.D. Multimodal Freight Transportation: Sustainability Challenges. In Proceedings of the International Conference on Sustainable Design and Manufacturing; Springer: Singapore, 2019; pp. 409–420. [Google Scholar] [CrossRef]
- Agatz, N.; Bouman, P.; Schmidt, M. Optimization Approaches for the Traveling Salesman Problem with Drone. Transp. Sci. 2018, 52, 965–981. [Google Scholar] [CrossRef]
- Chung, S.H.; Sah, B.; Lee, J. Optimization for Drone and Drone-Truck Combined Operations: A Review of the State of the Art and Future Directions. Comput. Oper. Res. 2020, 123, 105004. [Google Scholar] [CrossRef]
- AlMuhaideb, S.; Alhussan, T.; Alamri, S.; Altwaijry, Y.; Aijarbou, L.; Alrayes, H. Optimization of Truck-Drone Parcel Delivery Using Metaheuristics. Appl. Sci. 2021, 11, 6443. [Google Scholar] [CrossRef]
- Bi, Z.; Guo, X.; Wang, J.; Qin, S.; Liu, G. Deep Reinforcement Learning for Truck-Drone Delivery Problem. Drones 2023, 7, 445. [Google Scholar] [CrossRef]
- Weng, Y.-Y.; Wu, R.-Y.; Zheng, Y.-J. Cooperative Truck–Drone Delivery Path Optimization under Urban Traffic Restriction. Drones 2023, 7, 59. [Google Scholar] [CrossRef]
- Fikar, C.; Gronalt, M.; Hirsch, P. A Decision Support System for Coordinated Disaster Relief Distribution. Expert Syst. Appl. 2016, 57, 104–116. [Google Scholar] [CrossRef]
- Murray, C.C.; Chu, A.G. The Flying Sidekick Traveling Salesman Problem: Optimization of Drone-Assisted Parcel Delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Zhang, B. UPS Wants to Turn Its Delivery Trucks into Motherships for Autonomous Drones. 2017. Available online: https://www.businessinsider.com/ups-test-delivery-truck-autonomous-drones-2017-2 (accessed on 17 July 2024).
- Antunes, J. Amazon’s New Patent Wants to Combine Drones with Trucks for Deliveries. 2021, Commercial UAV News. Available online: https://www.commercialuavnews.com/drone-delivery/amazon-s-new-patent-wants-to-combine-drones-with-trucks-for-deliveries (accessed on 4 August 2024).
- Wang, J.; Zhou, K.; Xing, W.; Li, H.; Yang, Z. Applications, Evolutions, and Challenges of Drones in Maritime Transport. J. Mar. Sci. Eng. 2023, 11, 2056. [Google Scholar] [CrossRef]
- Jofré-Briceño, C.; Muñoz-La Rivera, F.; Atencio, E.; Herrera, R.F. Implementation of Facility Management for Port Infrastructure through the Use of UAVs, Photogrammetry and BIM. Sensors 2021, 21, 6686. [Google Scholar] [CrossRef] [PubMed]
- Brandão, A.S.; Smrcka, D.; Pairet, É.; Nascimento, T.; Saska, M. Side-Pull Maneuver: A Novel Control Strategy for Dragging a Cable-Tethered Load of Unknown Weight Using a UAV. IEEE Robot. Autom. Lett. 2022, 7, 9159–9166. [Google Scholar] [CrossRef]
- Soegaard, K. Flown Out by Drone. Maersk Tankers. 8 February 2016. Available online: https://maersktankers.com/newsroom/flown-out-by-drone (accessed on 22 July 2024).
- Schuler, M. Maersk Tankers Claims First Drone Delivery to Ship at Sea. gCaptain. 8 March 2016. Available online: https://gcaptain.com/maersk-tankers-claims-first-drone-delivery-to-ship-at-sea/ (accessed on 22 July 2024).
- Satam, P.U.S. Navy Tests VTOL Drones For Ship-to-Ship Small Cargo Delivery During RIMPAC. The Aviationist. 11 July 2024. Available online: https://theaviationist.com/2024/07/11/usn-tests-vtol-drones-for-ship-to-ship-small-cargo-delivery/ (accessed on 22 July 2024).
- Srinivas, S.; Ramachandiran, S.; Rajendran, S. Autonomous Robot-Driven Deliveries: A Review of Recent Developments and Future Directions. Transp. Res. Part E Logist. Transp. Rev. 2022, 165, 102834. [Google Scholar] [CrossRef]
- Bogue, R. The Role of Robots in Logistics. Ind. Robot. 2024, 51, 381–386. [Google Scholar] [CrossRef]
- Kim, J.; Jung, H. Robot Routing Problem of Last-Mile Delivery in Indoor Environments. Appl. Sci. 2022, 12, 9111. [Google Scholar] [CrossRef]
- Simoni, M.D.; Kutanoglu, E.; Claudel, C.G. Optimization and Analysis of a Robot-Assisted Last Mile Delivery System. Transp. Res. Part E Logist. Transp. Rev. 2020, 142, 102049. [Google Scholar] [CrossRef]
- Jennings, D.; Figliozzi, M. Study of Road Autonomous Delivery Robots and Their Potential Effects on Freight Efficiency and Travel. Transp. Res. Rec. 2020, 2674, 1019–1029. [Google Scholar] [CrossRef]
- Sah, B.; Gupta, R.; Bani-Hani, D. Analysis of Barriers to Implement Drone Logistics. Int. J. Logist. Res. Appl. 2021, 24, 531–550. [Google Scholar] [CrossRef]
- Arbanas, B.; Ivanovic, A.; Car, M.; Haus, H.; Orsag, M.; Petrovic, T.; Bogdan, S. Aerial-ground robotic system for autonomous delivery tasks. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5463–5468. [Google Scholar] [CrossRef]
- Arbanas, B.; Ivanovic, A.; Car, M.; Orsag, M.; Petrovic, T.; Bogdan, S. Decentralized planning and control for UAV–UGV cooperative teams. Auton. Robot. 2018, 42, 1601–1618. [Google Scholar] [CrossRef]
- Salton, G.; Buckley, C. Term-Weighting Approaches in Automatic Text Retrieval. Inf. Process. Manag. 1988, 24, 513–523. [Google Scholar] [CrossRef]
- Blei, D.M.; Ng, A.Y.; Jordan, M.I. Latent Dirichlet Allocation. J. Mach. Learn. Res. 2003, 3, 993–1022. [Google Scholar]
- Jung, H.; Kim, B. Identifying Research Topics and Trends in Asset Management for Sustainable Use: A Topic Modeling Approach. Sustainability 2021, 13, 4792. [Google Scholar] [CrossRef]
- Blei, D.M. Probabilistic Topic Models. Commun. ACM 2012, 55, 77–84. [Google Scholar] [CrossRef]
- Mimno, D.; Wallach, H.M.; Talley, E.; Leenders, M.; McCallum, A. Optimizing Semantic Coherence in Topic Models. In Proceedings of the 2011 Conference on Empirical Methods in Natural Language Processing, Edinburgh, Scotland, UK, 27–31 July 2011; pp. 262–272. [Google Scholar]
- Newman, D.; Lau, J.H.; Grieser, K.; Baldwin, T. Automatic Evaluation of Topic Coherence. In Proceedings of the Human Language Technologies: The 2010 Annual Conference of the North American Chapter of the Association for Computational Linguistics, Los Angeles, CA, USA, 1–6 June 2010; pp. 100–108. [Google Scholar]
- Griffiths, T.L.; Steyvers, M. Finding Scientific Topics. Proc. Natl. Acad. Sci. USA 2004, 101, 5228–5235. [Google Scholar] [CrossRef]
- Lee, H.; Kang, P. Identifying Core Topics in Technology and Innovation Management Studies: A Topic Model Approach. J. Technol. Transf. 2018, 43, 1291–1317. [Google Scholar] [CrossRef]
- Mohammed, S.H.; Al-Augby, S. LSA & LDA Topic Modeling Classification: Comparison Study on E-Books. Indones. J. Electr. Eng. Comput. Sci. 2020, 19, 353–362. [Google Scholar] [CrossRef]
- Sievert, C.; Shirley, K. LDAvis: A Method for Visualizing and Interpreting Topics. In Proceedings of the Workshop on Interactive Language Learning, Visualization, and Interfaces, Baltimore, MD, USA, 27 June 2014. [Google Scholar]
- NLTK Documentation. 2023. Available online: www.nltk.org/api/nltk.stem.WordNetLemmatizer.html?highlight=wordnet (accessed on 24 August 2024).
- Poikonen, S.; Golden, B. The Mothership and Drone Routing Problem. INFORMS J. Comput. 2020, 32, 249–262. [Google Scholar] [CrossRef]
- Agrawal, R.; Gupta, H.; Chaurasia, B.K. Classification and Comparison of Ad Hoc Networks: A Review. Egypt. Inform. J. 2023, 24, 1–25. [Google Scholar] [CrossRef]
- Anwer, M.S.; Guy, C. A Survey of VANET Technologies. J. Emerg. Trends Comput. Inf. Sci. 2014, 5, 661–671. [Google Scholar]
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. VANet Security Challenges and Solutions: A Survey. Veh. Commun. 2017, 7, 7–20. [Google Scholar] [CrossRef]
- Lin, N.; Fu, L.; Zhao, L.; Min, G.; Al-Dubai, A.; Gacanin, H. A Novel Multimodal Collaborative Drone-Assisted VANET Networking Model. IEEE Trans. Wirel. Commun. 2020, 19, 4919–4933. [Google Scholar] [CrossRef]
- Rosser, J.C., Jr.; Vignesh, V.; Terwilliger, B.A.; Parker, B.C. Surgical and Medical Applications of Drones: A Comprehensive Review. JSLS 2018, 22, e2018.00018. [Google Scholar] [CrossRef]
- Awad, A.; Trenfield, S.J.; Pollard, T.D.; Ong, J.J.; Elbadawi, M.; McCoubrey, L.E.; Gayanes, A.; Gaisford, S.; Basit, A.W. Connected Healthcare: Improving Patient Care Using Digital Health Technologies. Adv. Drug Deliv. Rev. 2021, 178, 113958. [Google Scholar] [CrossRef]
- sUAS News. TU Delft’s Ambulance Drone Drastically Increases Chances of Survival of Cardiac Arrest Patients. 2014. Available online: https://www.suasnews.com/2014/10/tu-delfts-ambulance-drone-drastically-increases-chances-of-survival-of-cardiac-arrest-patients/ (accessed on 12 July 2024).
- Wang, Y.; Wallace, S.W.; Shen, B.; Choi, T.M. Service Supply Chain Management: A Review of Operational Models. Eur. J. Oper. Res. 2015, 247, 685–698. [Google Scholar] [CrossRef]
- Li, C.; Tanghe, E.; Suanet, P.; Plets, D.; Hoebeke, J.; Poorter, E.D.; Joseph, W. ReLoc 2.0: UHF-RFID Relative Localization for Drone-Based Inventory Management. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Cristiani, D.; Bottonelli, F.; Trotta, A.; Di Felice, M. Inventory Management through Mini-Drones: Architecture and Proof-of-Concept Implementation. In Proceedings of the 2020 IEEE 21st International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Cork, Ireland, 31 August–3 September 2020; pp. 186–193. [Google Scholar] [CrossRef]
- Farahnakian, F.; Koivunen, L.; Mäkilä, T.; Heikkonen, J. Towards Autonomous Industrial Warehouse Inspection. In Proceedings of the 2021 26th International Conference on Automation and Computing (ICAC), Portsmouth, UK, 2–4 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Wawrla, L.; Maghazei, O.; Netland, T. Applications of Drones in Warehouse Operations. In Whitepaper; ETH Zurich, D-MTEC: Zürich, Switzerland, 2019; pp. 1–12. [Google Scholar]
- Martínez-Cruz, A.; Martínez-Cruz, A.; Ramírez-Gutiérrez, K.A.; Feregrino-Uribe, C.; Morales-Reyes, A. Security on In-Vehicle Communication Protocols: Issues, Challenges, and Future Research Directions. Comput. Commun. 2021, 180, 1–20. [Google Scholar] [CrossRef]
- Prapulla, N.; Veena, S.; Srinivasalu, G. Development of Algorithms for MAV Security. In Proceedings of the 2016 IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 20–21 May 2016; pp. 421–425. [Google Scholar] [CrossRef]
- Dua, A.; Duan, L.; Kumar, N.; Yang, L.T. Secure Message Communication Protocol among Vehicles in Smart City. IEEE Trans. Veh. Technol. 2017, 67, 4359–4373. [Google Scholar] [CrossRef]
- Khan, N.A.; Kumar, M.; Das, A.K.; Susilo, W. Emerging Use of UAVs: Secure Communication Protocol Issues and Challenges. In Drones in Smart-Cities; Elsevier: Amsterdam, The Netherlands, 2020; pp. 37–55. [Google Scholar] [CrossRef]
- Atoev, S.; Kwon, K.-R.; Lee, S.-H.; Moon, K.-S. Data Analysis of the MAVLink Communication Protocol. In Proceedings of the 2017 International Conference on Information Science and Communications Technologies (ICISCT), Tashkent, Uzbekistan, 2–4 November 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Ko, Y.; Kim, J.; Duguma, D.G.; Astillo, P.V.; You, I.; Pau, G. Drone Secure Communication Protocol for Future Sensitive Applications in Military Zone. Sensors 2021, 21, 2057. [Google Scholar] [CrossRef]
- Elsayed, M.; Mohamed, M. The Impact of Airspace Regulations on Unmanned Aerial Vehicles in Last-Mile Operation. Transp. Res. Part D Transp. Environ. 2020, 87, 102480. [Google Scholar] [CrossRef]
- Tang, C.S.; Veelenturf, L.P. The Strategic Role of Logistics in the Industry 4.0 Era. Transp. Res. Part E Logist. Transp. Rev. 2019, 129, 1–11. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Suzuki, S. Recent Researches on Innovative Drone Technologies in Robotics Field. Adv. Robot. 2018, 32, 1008–1022. [Google Scholar] [CrossRef]
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-Aided Routing: A Literature Review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Daud, S.M.S.M.; Yusof, M.Y.P.M.; Heo, C.C.; Khoo, L.S.; Singh, M.K.C.; Mahmood, M.S.; Nawawi, H. Applications of Drone in Disaster Management: A Scoping Review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef]
- Hong, I.; Kuby, M.; Murray, A.T. A Range-Restricted Recharging Station Coverage Model for Drone Delivery Service Planning. Transp. Res. Part C Emerg. Technol. 2018, 90, 198–212. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. A Method of Optimized Deployment of Charging Stations for Drone Delivery. IEEE Trans. Transp. Electrification 2020, 6, 510–518. [Google Scholar] [CrossRef]
- Hassija, V.; Saxena, V.; Chamola, V. Scheduling Drone Charging for Multi-Drone Network Based on Consensus Time-Stamp and Game Theory. Comput. Commun. 2020, 149, 51–61. [Google Scholar] [CrossRef]
- Alyassi, R.; Khonji, M.; Karapetyan, A.; Chau, S.C.K.; Elbassioni, K.; Tseng, C.M. Autonomous Recharging and Flight Mission Planning for Battery-Operated Autonomous Drones. IEEE Trans. Autom. Sci. Eng. 2022, 20, 1034–1046. [Google Scholar] [CrossRef]
- Çetin, E.; Barrado, C.; Muñoz, G.; Macias, M.; Pastor, E. Drone Navigation and Avoidance of Obstacles through Deep Reinforcement Learning. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Yousefi, P.; Fekriazgomi, H.; Demir, M.A.; Prevost, J.J.; Jamshidi, M. Data-Driven Fault Detection of Unmanned Aerial Vehicles Using Supervised Learning over Cloud Networks. In Proceedings of the 2018 World Automation Congress (WAC), Stevenson, WA, USA, 3–7 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Musa, S.A.; Abdullah, R.S.A.R.; Sali, A.; Ismail, A.; Rashid, N.E.A.; Ibrahim, I.P.; Salah, A.A. A Review of Copter Drone Detection Using Radar Systems. Def. S&T Tech. Bull. 2019, 12, 16–38. [Google Scholar]
- Dogru, S.; Marques, L. Drone Detection Using Sparse Lidar Measurements. IEEE Robot. Autom. Lett. 2022, 7, 3062–3069. [Google Scholar] [CrossRef]
- Rohan, A.; Rabah, M.; Kim, S.-H. Convolutional Neural Network-Based Real-Time Object Detection and Tracking for Parrot AR Drone 2. IEEE Access 2019, 7, 69575–69584. [Google Scholar] [CrossRef]
- Safadinho, D.; Ramos, J.; Ribeiro, R.; Filipe, V.; Barroso, J.; Pereira, A. UAV Landing Using Computer Vision Techniques for Human Detection. Sensors 2020, 20, 613. [Google Scholar] [CrossRef]
- Aydin, Y.; Kurt, G.K.; Ozdemir, E.; Yanikomeroglu, H. Authentication and Handover Challenges and Methods for Drone Swarms. IEEE J. Radio Freq. Identif. 2022, 6, 220–228. [Google Scholar] [CrossRef]
- Kurt, G.K.; Yanikomeroglu, H. Communication, Computing, Caching, and Sensing for Next-Generation Aerial Delivery Networks: Using a High-Altitude Platform Station as an Enabling Technology. IEEE Veh. Technol. Mag. 2021, 16, 108–117. [Google Scholar] [CrossRef]
- Kallenborn, Z.; Bleek, P.C. Swarming Destruction: Drone Swarms and Chemical, Biological, Radiological, and Nuclear Weapons. Nonprolif. Rev. 2018, 25, 523–543. [Google Scholar] [CrossRef]
- Chen, W.; Liu, J.; Guo, H.; Kato, N. Toward Robust and Intelligent Drone Swarm: Challenges and Future Directions. IEEE Netw. 2020, 34, 278–283. [Google Scholar] [CrossRef]
- Myjak, M.V.K.; Ranganathan, P. Unmanned Aerial System (UAS) Swarm Design, Flight Patterns, Communication Type, Applications, and Recommendations. In Proceedings of the 2022 IEEE International Conference on Electro Information Technology (eIT), Mt Pleasant, MI, USA, 19–21 May 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Dewangan, R.K.; Saxena, P. Three-Dimensional Route Planning for Multiple Unmanned Aerial Vehicles Using Salp Swarm Algorithm. J. Exp. Theor. Artif. Intell. 2023, 35, 1059–1078. [Google Scholar] [CrossRef]
- Lieb, J.; Volkert, A. Unmanned Aircraft Systems Traffic Management: A Comparison on the FAA UTM and the European CORUS ConOps Based on U-Space. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Mekdad, Y.; Aris, A.; Bahun, L.; Fergougui, A.E.; Conti, M.; Lazzeretti, R.; Uluagac, A.S. A Survey on Security and Privacy Issues of UAVs. Comput. Netw. 2023, 224, 109626. [Google Scholar] [CrossRef]
- Yahuza, M.; Idris, M.Y.I.; Ahmedy, I.B.; Wahab, A.W.A.; Nandy, T.; Noor, N.M.; Bala, A. Internet of Drones Security and Privacy Issues: Taxonomy and Open Challenges. IEEE Access 2021, 9, 57243–57270. [Google Scholar] [CrossRef]
- Wazid, M.; Bera, B.; Mitra, A.; Das, A.K.; Ali, R. Private Blockchain-Envisioned Security Framework for AI-Enabled IoT-Based Drone-Aided Healthcare Services. In Proceedings of the 2nd ACM MobiCom Workshop on Drone Assisted Wireless Communications for 5G and Beyond (DroneCom’20), London, UK, 25 September 2020; pp. 9–14. [Google Scholar] [CrossRef]
- Yazdinejad, A.; Parizi, R.M.; Dehghantanha, A.; Karimipour, H.; Srivastava, G.; Aledhari, M. Enabling Drones in the Internet of Things with Decentralized Blockchain-Based Security. IEEE Internet Things J. 2020, 8, 6406–6415. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Huang, C. When Drones Take Public Transport: Towards Low Cost and Large Range Parcel Delivery. In Proceedings of the 2019 IEEE 17th International Conference on Industrial Informatics (INDIN), Helsinki, Finland, 22–25 July 2019; pp. 583–588. [Google Scholar] [CrossRef]
- Doole, M.; Ellerbroek, J.; Hoekstra, J.M. Drone Delivery: Urban Airspace Traffic Density Estimation. In Proceedings of the SIDs2018: 8th SESAR Innovation Days, Salzburg, Austria, 3–7 December 2018; pp. 1–8. [Google Scholar]
- Alharbi, A.; Petrunin, I.; Panagiotakopoulos, D. Deep Learning Architecture for UAV Traffic-Density Prediction. Drones 2023, 7, 78. [Google Scholar] [CrossRef]
- Cordova, F.; Olivares, V. Design of Drone Fleet Management Model in a Production System of Customized Products. In Proceedings of the 2016 6th International Conference on Computers Communications and Control (ICCCC), Baile Felix, Romania, 10–14 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 206–211. [Google Scholar] [CrossRef]
- Boudergui, K.; Carrel, F.; Domenech, T.; Guénard, N.; Poli, J.-P.; Ravet, A.; Schoepff, V.; Woo, R. Development of a Drone Equipped with Optimized Sensors for Nuclear and Radiological Risk Characterization. In Proceedings of the 2011 2nd International Conference on Advancements in Nuclear Instrumentation, Measurement Methods and Their Applications, Ghent, Belgium, 6–9 June 2011; IEEE: New York, NY, USA, 2011. [Google Scholar] [CrossRef]
- Brunelli, D.; Pino, F.; Fontana, C.L.; Pancheri, L.; Moretto, S. DRAGoN: Drone for Radiation Detection of Gammas and Neutrons. In Proceedings of the 2020 IEEE Sensors, Rotterdam, The Netherlands, 25–28 October 2020; IEEE: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Pobkrut, T.; Eamsa-Ard, T.; Kerdcharoen, T. Sensor Drone for Aerial Odor Mapping for Agriculture and Security Services. In Proceedings of the 2016 13th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, 28 June–1 July 2016; IEEE: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Noda, R.; Nakata, T.; Ikeda, T.; Chen, D.; Yoshinaga, Y.; Ishibashi, K.; Rao, C.; Liu, H. Development of Bio-Inspired Low-Noise Propeller for a Drone. J. Robot. Mechatron. 2018, 30, 337–343. [Google Scholar] [CrossRef]
- Nguyen, D.Q.; Loianno, G.; Ho, V.A. Towards Design of a Deformable Propeller for Drone Safety. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), Yale University, New Haven, CT, USA, 6–9 April 2020; IEEE: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Raivi, A.M.; Huda, S.M.A.; Alam, M.M.; Moh, S. Drone Routing for Drone-Based Delivery Systems: A Review of Trajectory Planning, Charging, and Security. Sensors 2023, 23, 1463. [Google Scholar] [CrossRef]
- Conte, C.; de Alteriis, G.; Schiano Lo Moriello, R.; Accardo, D.; Rufino, G. Drone Trajectory Segmentation for Real-Time and Adaptive Time-of-Flight Prediction. Drones 2021, 5, 62. [Google Scholar] [CrossRef]
- Estrada, M.A.R.; Ndoma, A. The Uses of Unmanned Aerial Vehicles–UAV’s-(or Drones) in Social Logistic: Natural Disasters Response and Humanitarian Relief Aid. Procedia Comput. Sci. 2019, 149, 375–383. [Google Scholar] [CrossRef]
- Zhang, J.; Campbell, J.F.; Sweeney II, D.C.; Hupman, A.C. Energy Consumption Models for Delivery Drones: A Comparison and Assessment. Transp. Res. Part D Transp. Environ. 2021, 90, 102668. [Google Scholar] [CrossRef]
- Roach, A. Amazon to Test Prime Air Drone Delivery Service in the UK. 2024. Available online: https://www.cnbc.com/2024/08/15/amazon-to-test-prime-air-drone-delivery-service-in-the-uk.html (accessed on 24 August 2024).
- DHL Launches Its First Regular Fully-Automated and Intelligent Urban Drone Delivery Service. 2019. Available online: https://group.dhl.com/en/media-relations/press-releases/2019/dhl-launches-its-first-regular-fully-automated-and-intelligent-urban-drone-delivery-service.html (accessed on 24 August 2024).
- Bracken, C.; Lyon, R.D.; Mansour, M.J.; Molnar, A.; Saulnier, A.; Thompson, S.; Adams, G.; Masoodi, M.; Sharpe, J. Surveillance Drones: Privacy Implications of the Spread of Unmanned Aerial Vehicles (UAVs) in Canada; Surveillance Studies Centre, Queen’s University: Kingston, UK, 2014; Volume 30. [Google Scholar]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle Routing Problems for Drone Delivery. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Deployment of Charging Stations for Drone Delivery Assisted by Public Transportation Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 15043–15054. [Google Scholar] [CrossRef]
- Unmanned Aircraft Systems (UAS). 15 February. Available online: https://www.faa.gov/newsroom/unmanned-aircraft-systems-uas (accessed on 2 August 2024).
- Howell III, C.T.; Frank, J.; Taylor, T.; Richard, G.; Cecil, M.; Lee, J.; John, C.; Jack, K. The First Government Sanctioned Delivery of Medical Supplies by Remotely Controlled Unmanned Aerial System (UAS). U.S. Patent NF1676L-23651, 2 May 2016. [Google Scholar]
- Tamke, F.; Buscher, U. The Vehicle Routing Problem with Drones and Drone Speed Selection. Comput. Oper. Res. 2023, 152, 106112. [Google Scholar] [CrossRef]
- Lu, Y.; Yang, J.; Yang, C. A Humanitarian Vehicle Routing Problem Synchronized with Drones in Time-Varying Weather Conditions. Comput. Ind. Eng. 2023, 184, 109563. [Google Scholar] [CrossRef]
- Poikonen, S.; Wang, X.; Golden, B. The Vehicle Routing Problem with Drones: Extended Models and Connections. Networks 2017, 70, 34–43. [Google Scholar] [CrossRef]
- Kitjacharoenchai, P.; Min, B.-C.; Lee, S. Two-Echelon Vehicle Routing Problem with Drones in Last Mile Delivery. Int. J. Prod. Econ. 2020, 225, 107598. [Google Scholar] [CrossRef]
- Marinelli, M.; Caggiani, L.; Ottomanelli, M.; Dell’Orco, M. En Route Truck–Drone Parcel Delivery for Optimal Vehicle Routing Strategies. IET Intell. Transp. Syst. 2018, 12, 253–261. [Google Scholar] [CrossRef]
- Bogyrbayeva, A.; Yoon, T.; Ko, H.; Lim, S.; Yun, H.; Kwon, C. A Deep Reinforcement Learning Approach for Solving the Traveling Salesman Problem with Drone. Transp. Res. Part C Emerg. Technol. 2023, 148, 103981. [Google Scholar] [CrossRef]
- Sookram, N.; Ramsewak, D.; Singh, S. The Conceptualization of an Unmanned Aerial System (UAS) Ship–Shore Delivery Service for the Maritime Industry of Trinidad. Drones 2021, 5, 76. [Google Scholar] [CrossRef]
- Pensado, E.A.; López, F.V.; Jorge, H.G.; Pinto, A.M. UAV Shore-to-Ship Parcel Delivery: Gust-Aware Trajectory Planning. IEEE Trans. Aerosp. Electron. Syst. 2024. [Google Scholar] [CrossRef]
- Krystosik-Gromadzińska, A. The Use of Drones in the Maritime Sector–Areas and Benefits. Zesz. Nauk. Akad. Morsk. Szczec. 2021, 67, 16–25. [Google Scholar] [CrossRef]
- Notteboom, T.; Neyens, K. The Future of Port Logistics: Meeting the Challenges of Supply Chain Integration; ING Bank: Bruselas, Belgium, 2017. [Google Scholar]
- Inkinen, T.; Helminen, R.; Saarikoski, J. Technological Trajectories and Scenarios in Seaport Digitalization. Res. Transp. Bus. Manag. 2021, 41, 100633. [Google Scholar] [CrossRef]
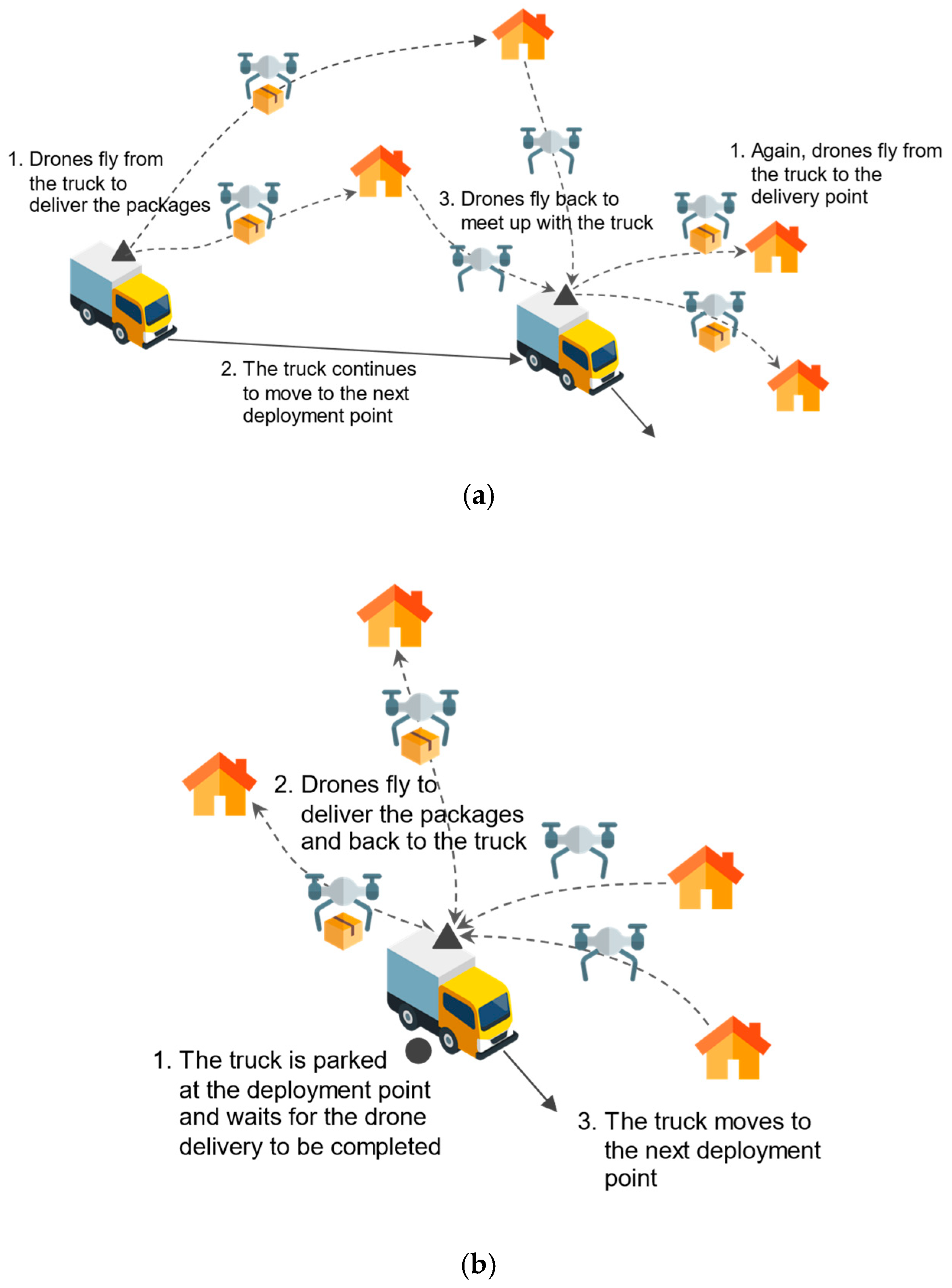
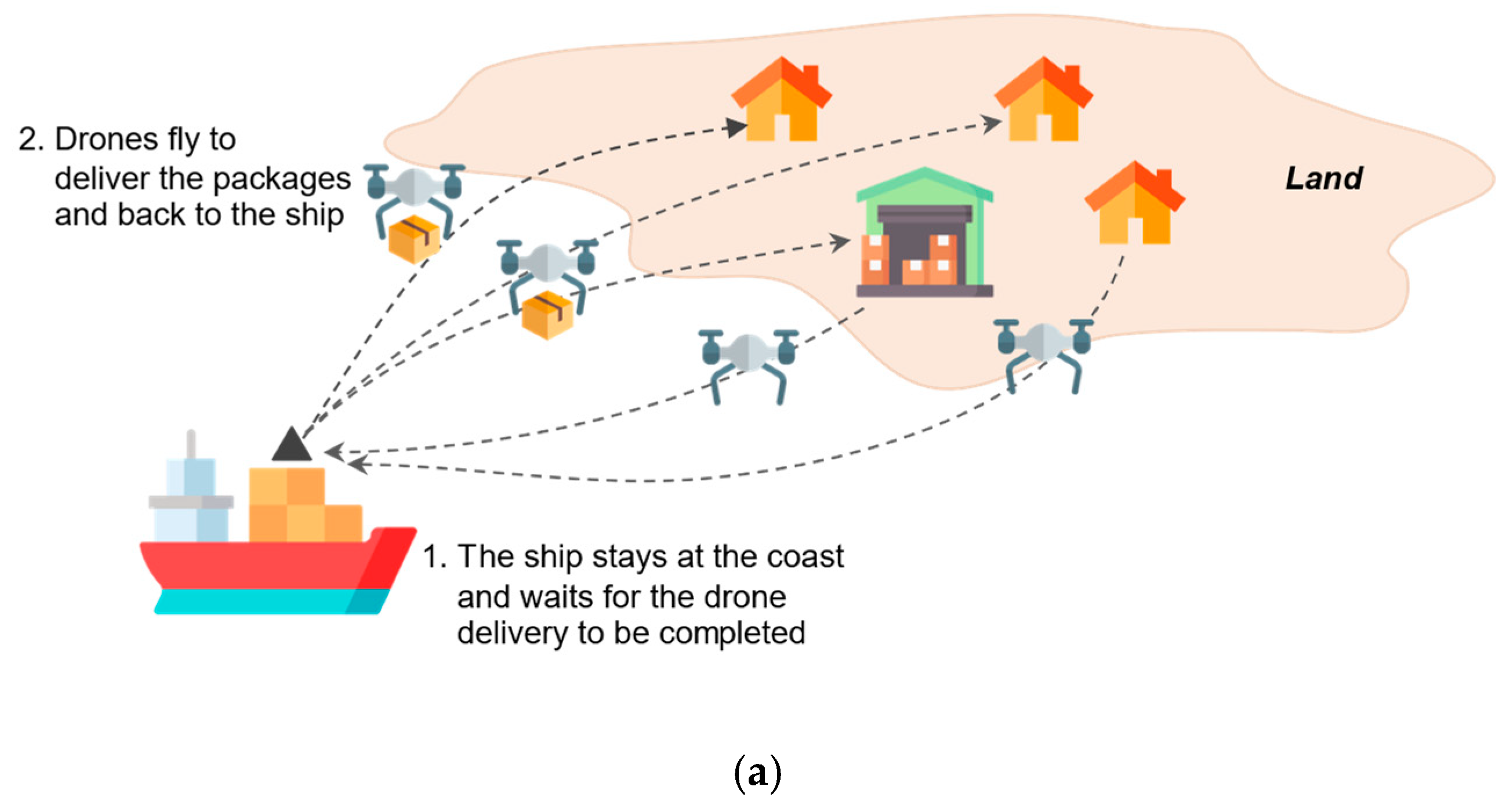
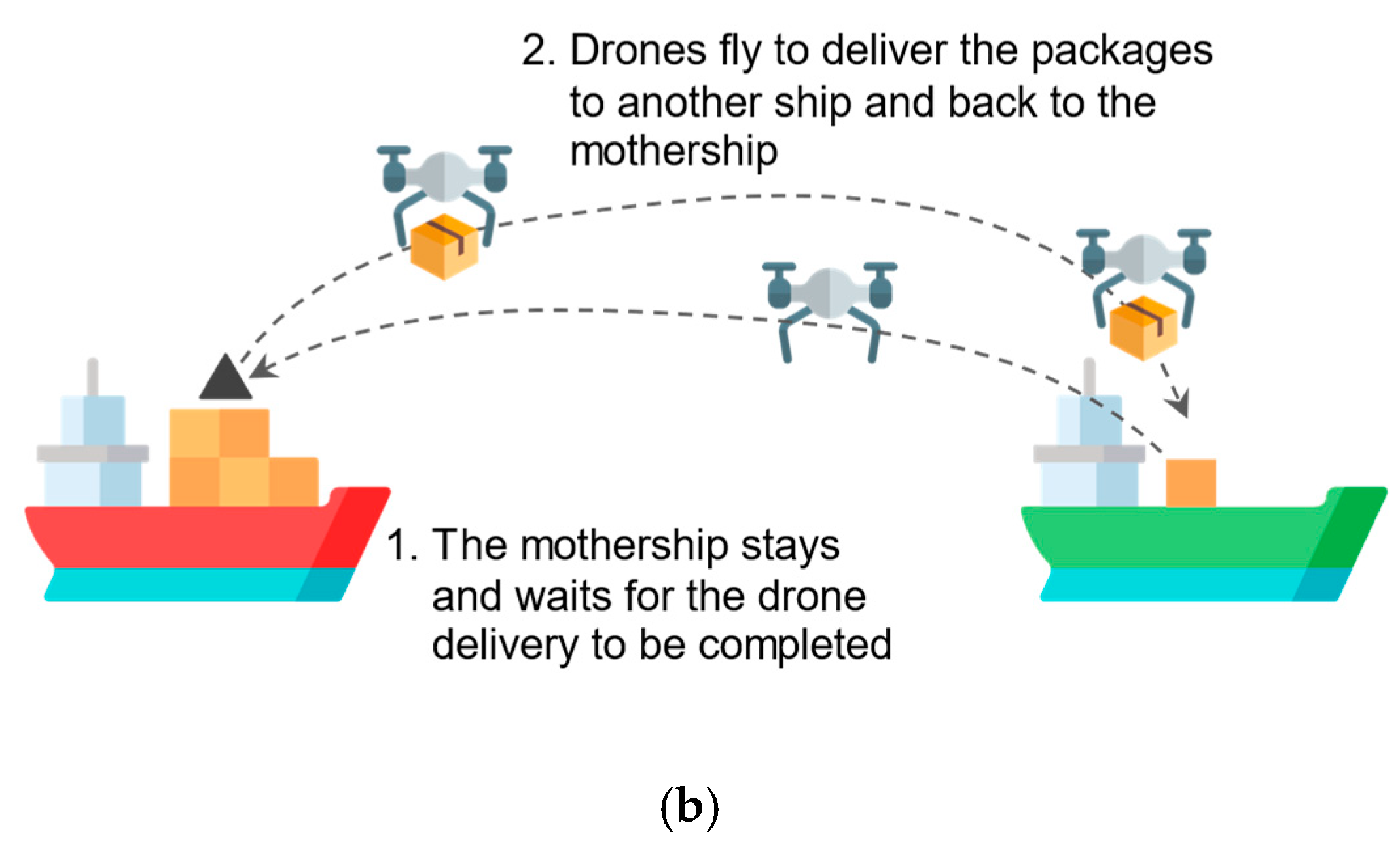
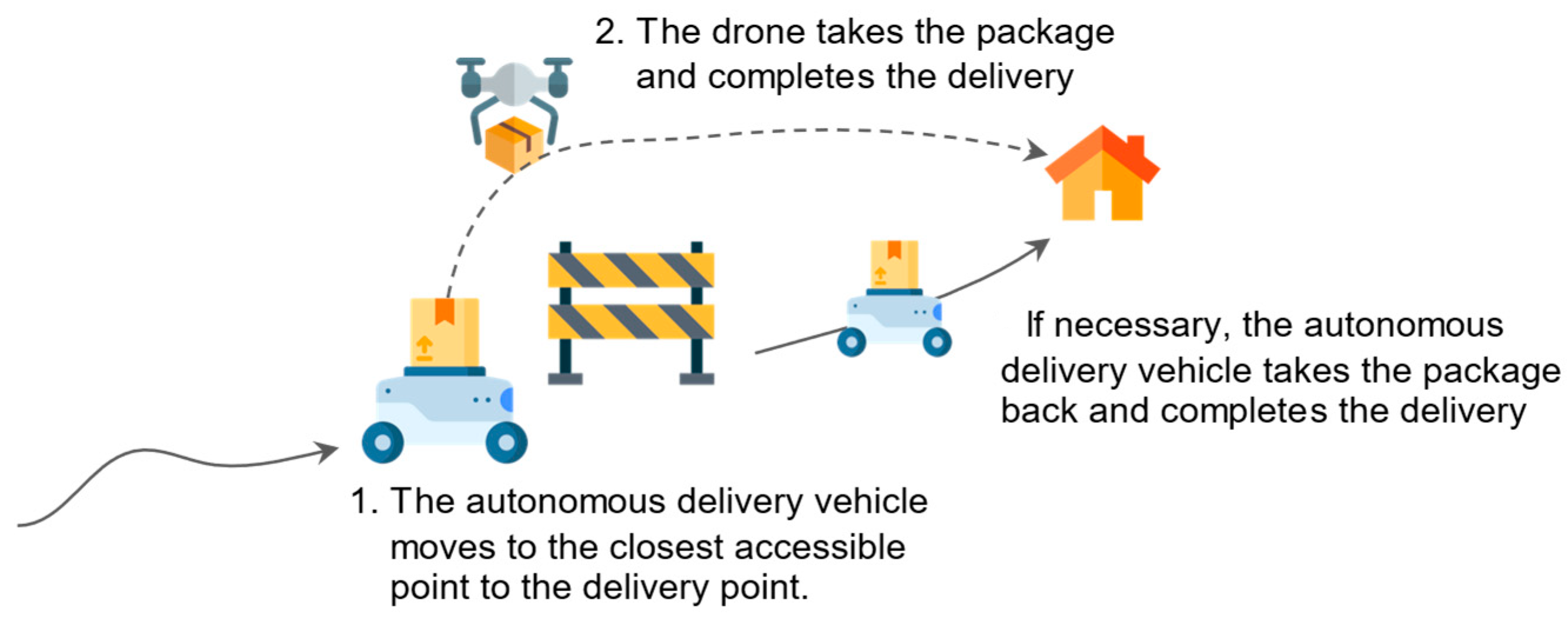
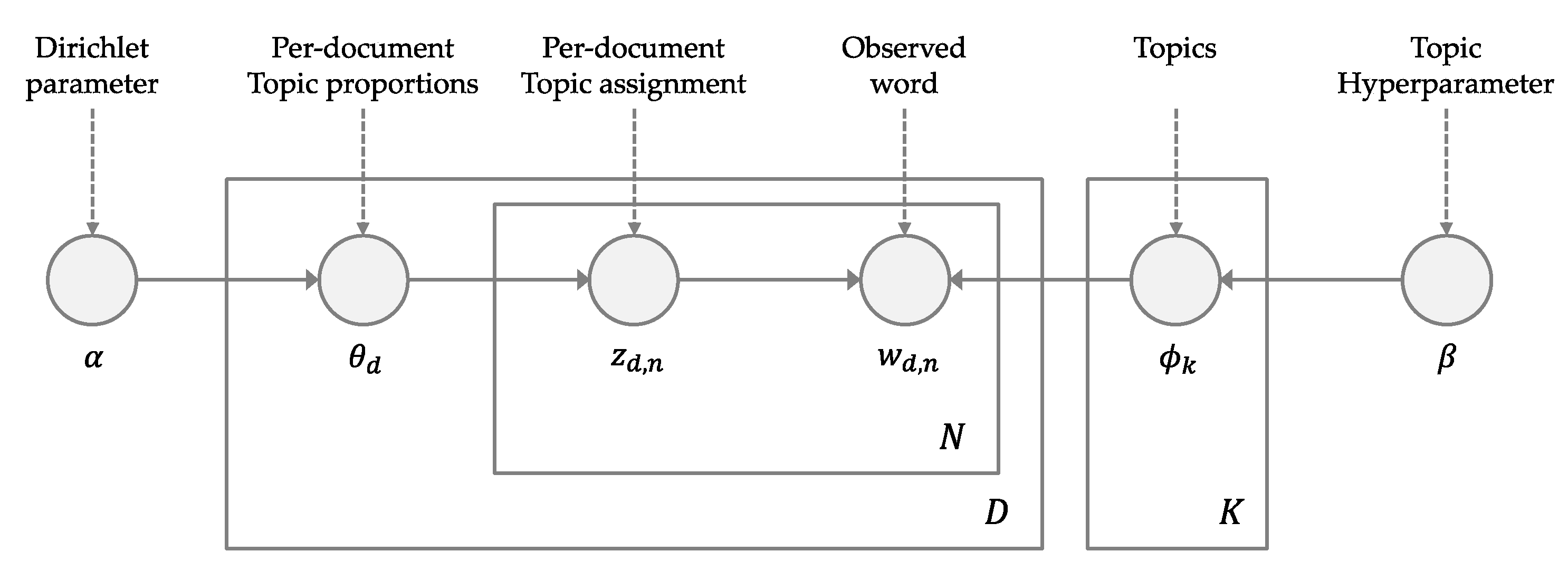
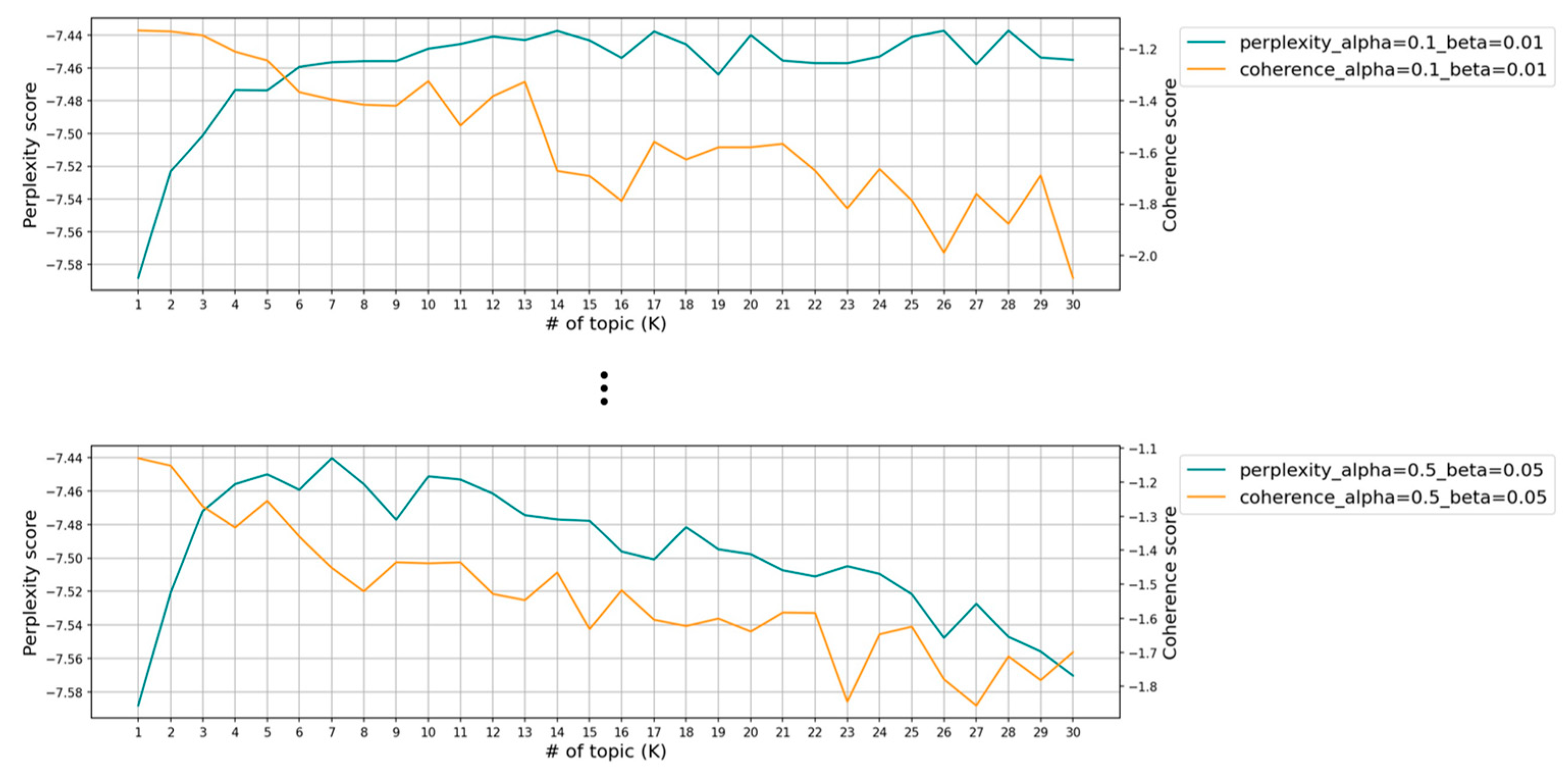
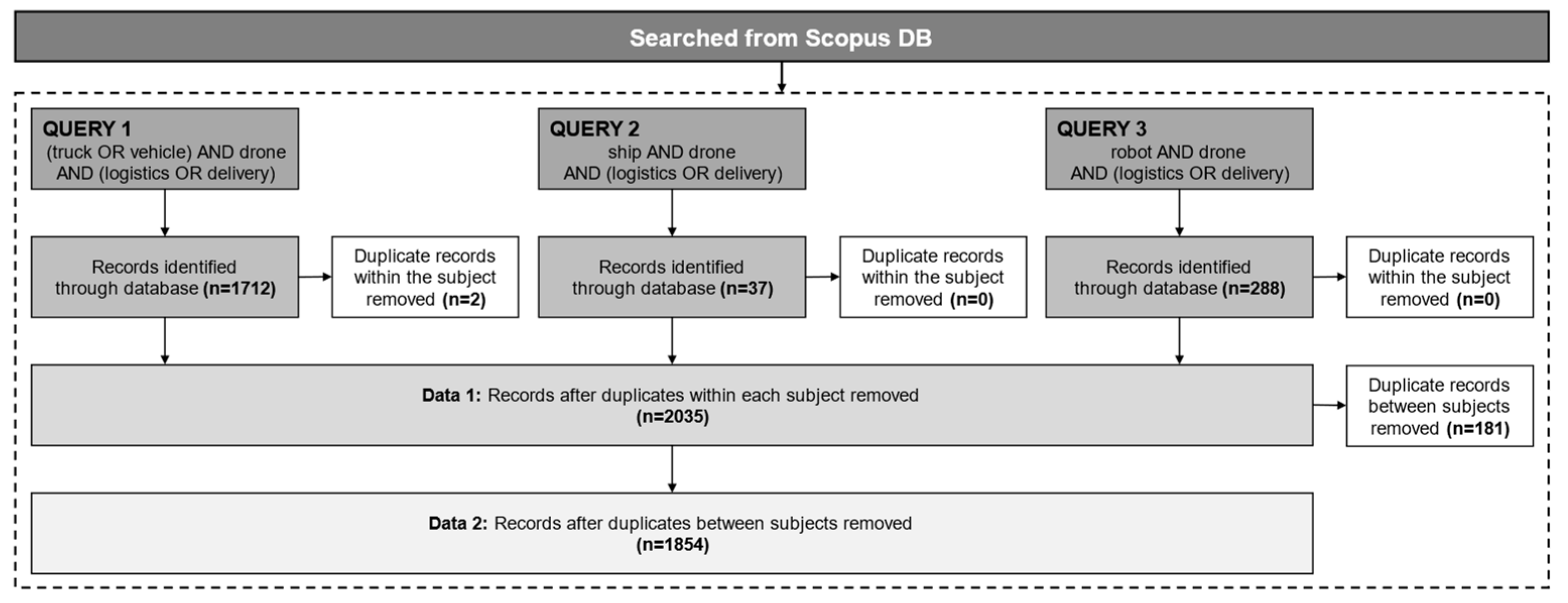
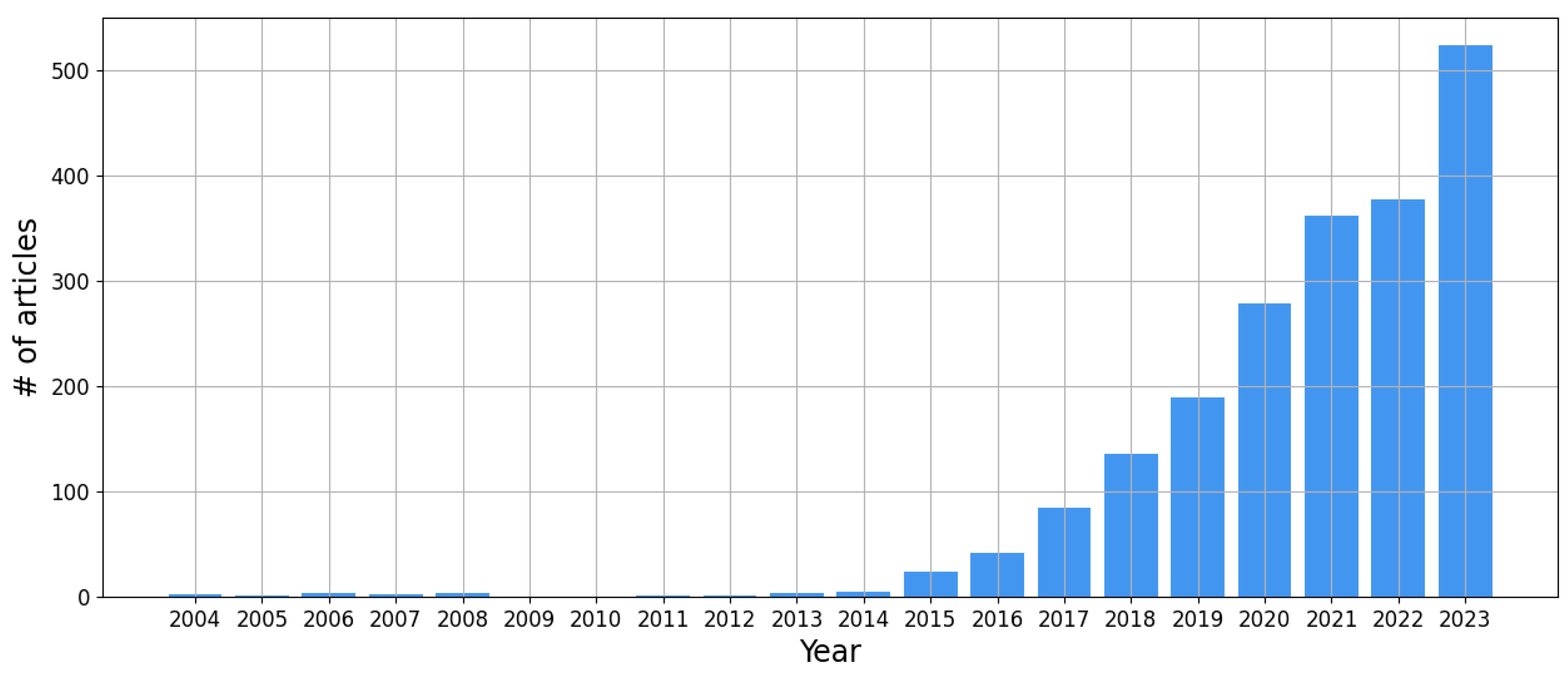
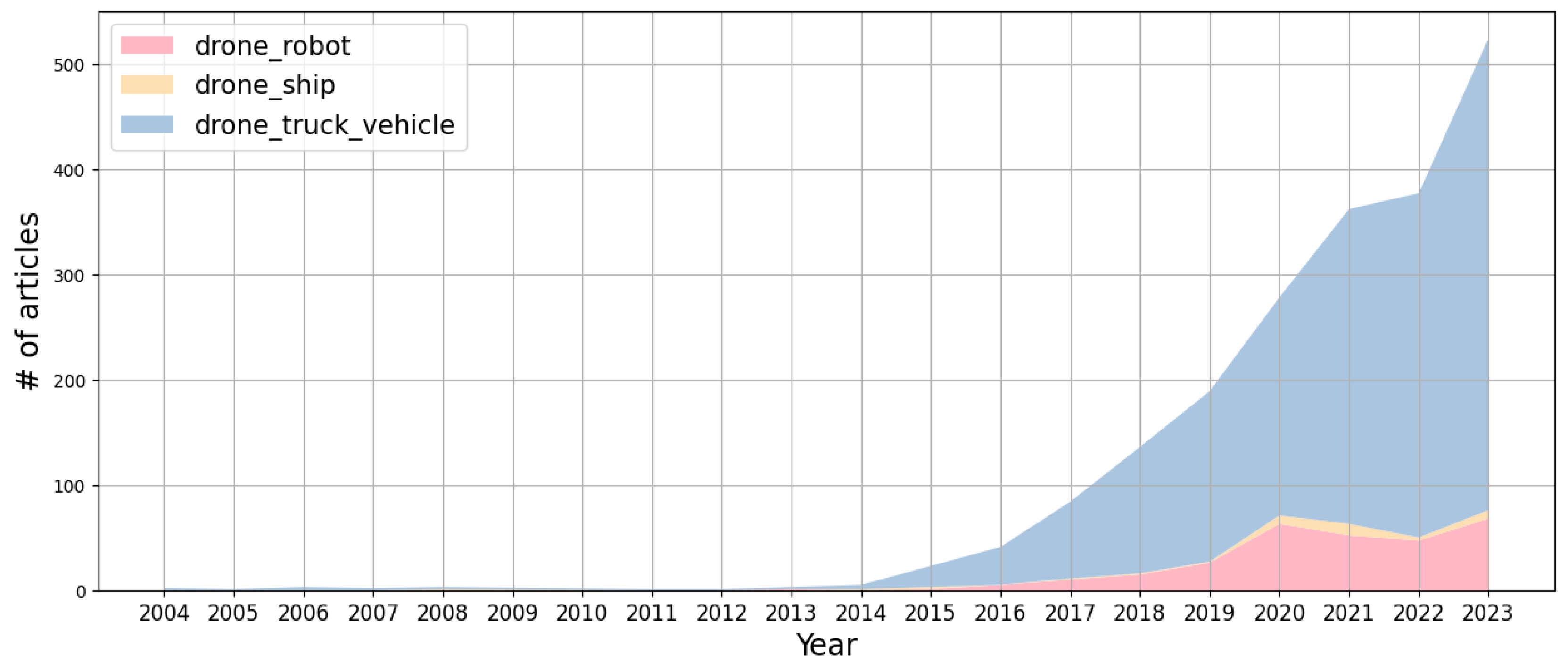
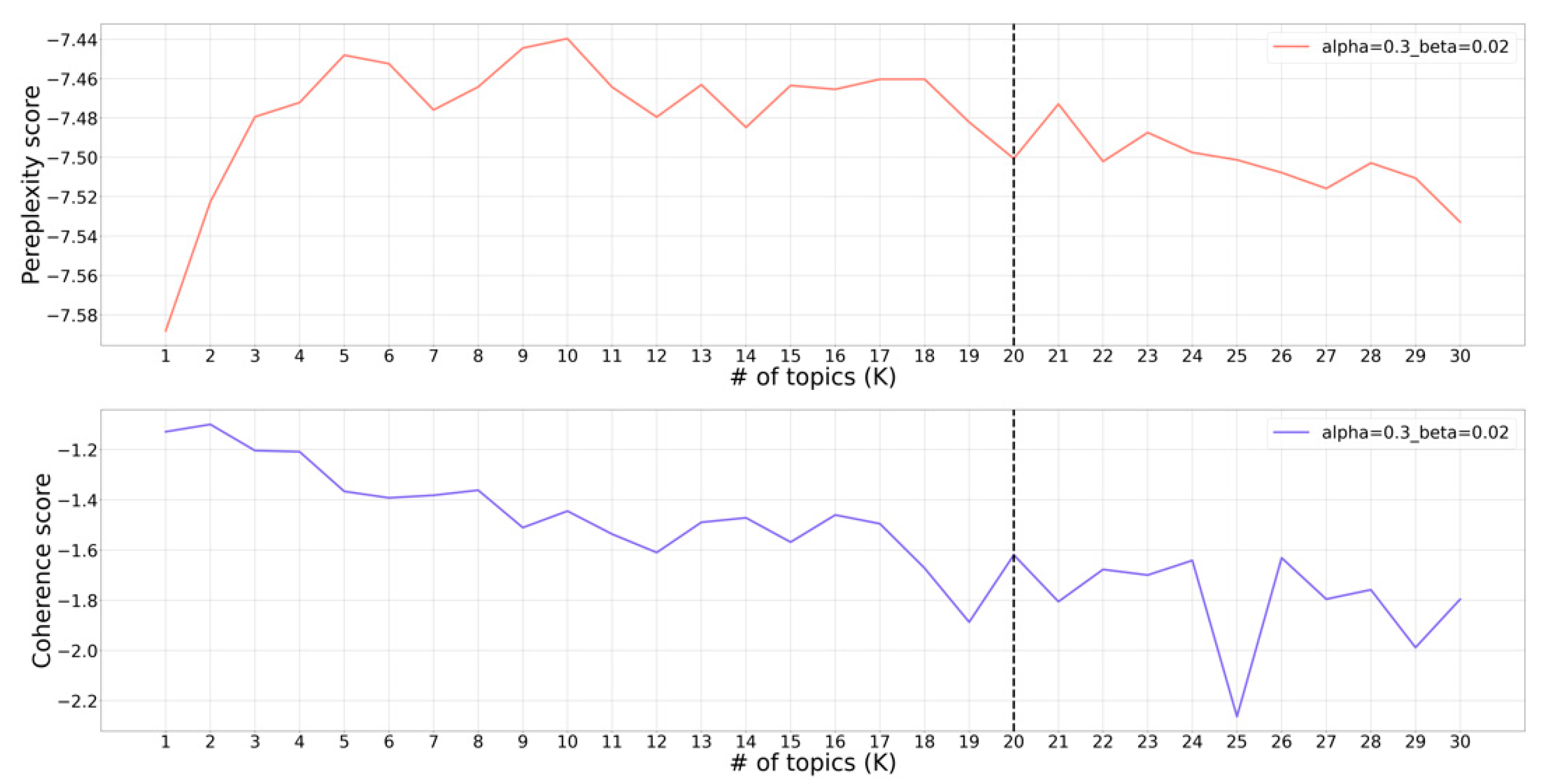
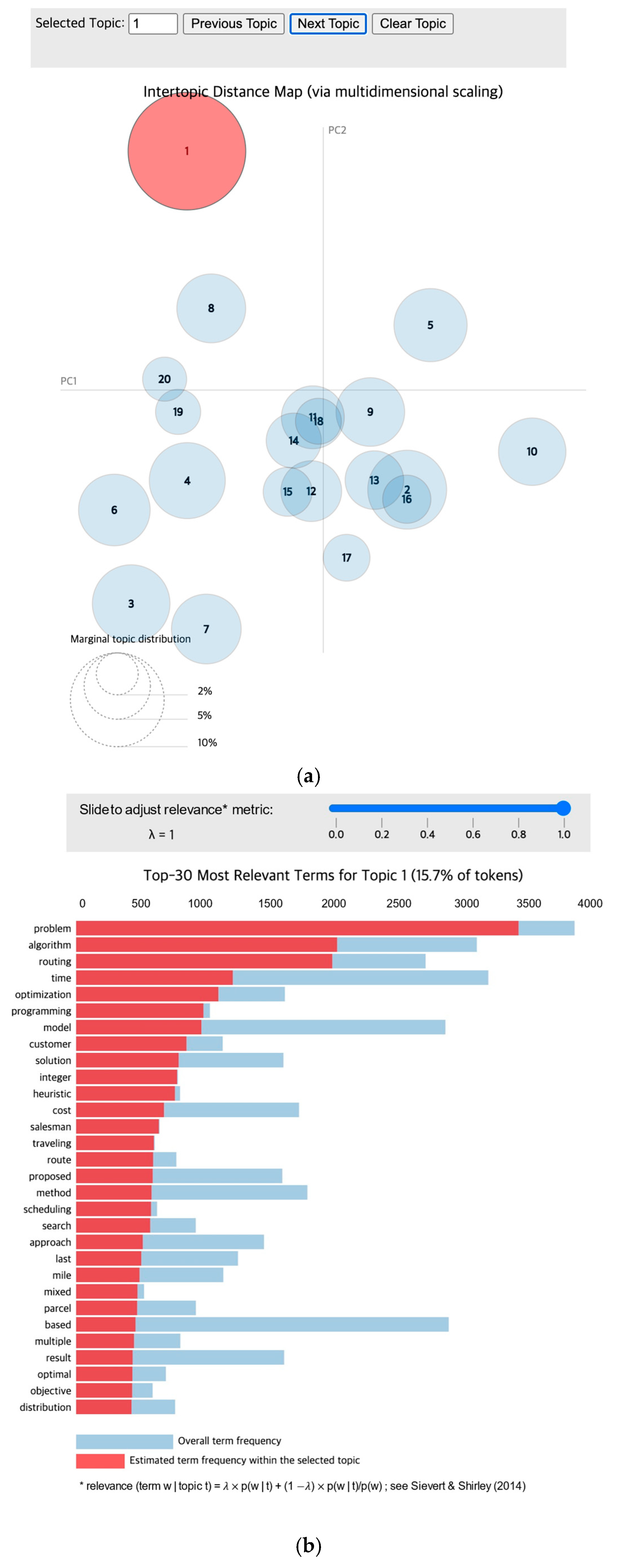
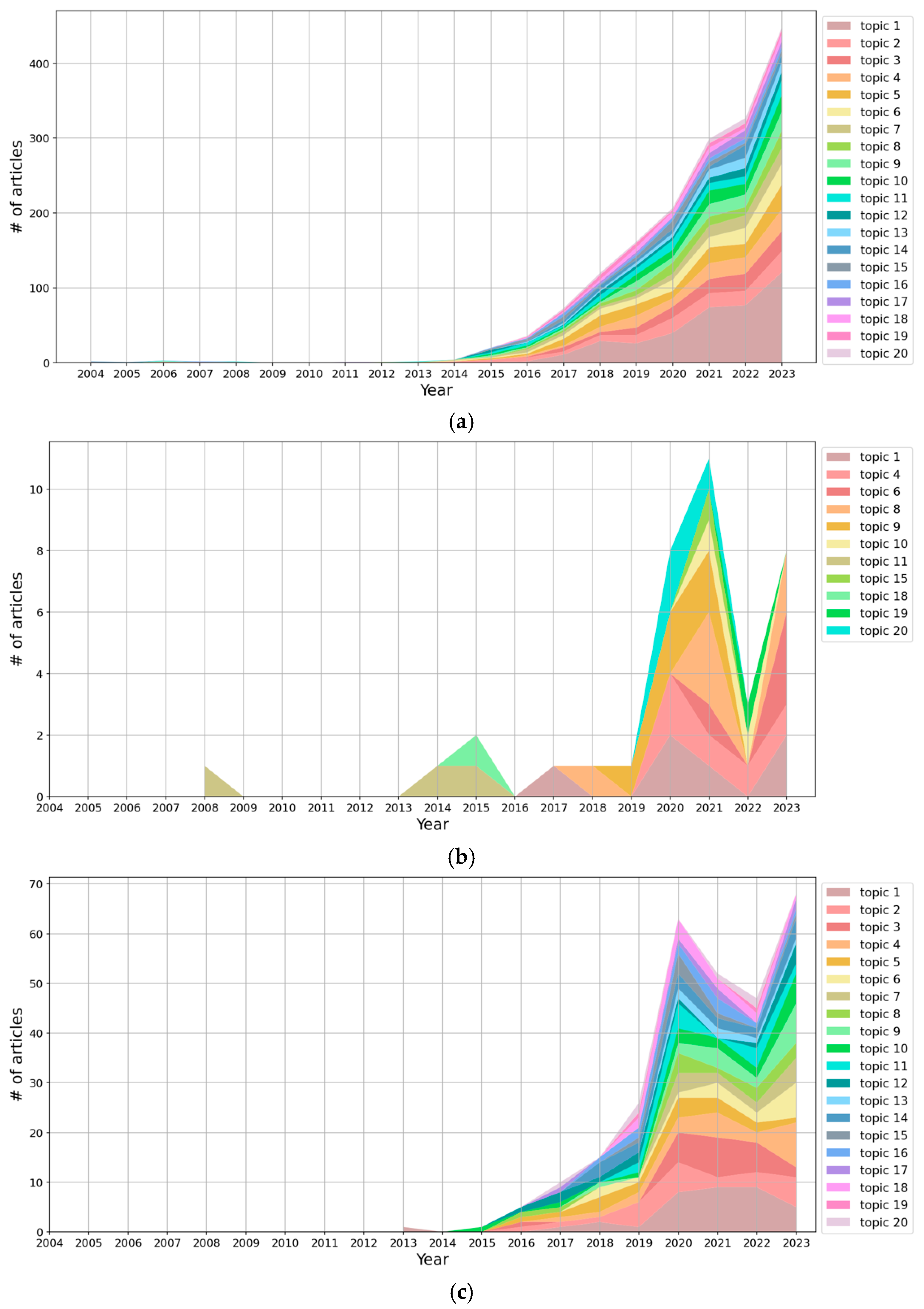
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).