
A Green Laboratory Approach to Medical Sample Transportation: Assessing the Carbon Dioxide (CO2) Footprint of Medical Sample Transportation by Drone, Combustion Car, and Electric Car




Abstract
:1. Introduction
2. Materials
2.1. Study Design
2.2. Transportation Modalities
2.3. Aircraft
2.4. Data Collection
2.5. System Architecture
2.6. Handling Environmental Challenges in Drone Transportation
3. Methods
3.1. CO2 Estimation Methods
3.2. Routes
3.3. Comparative and Statistical Analyses
3.4. Quality Assurance
3.5. Ethical Considerations
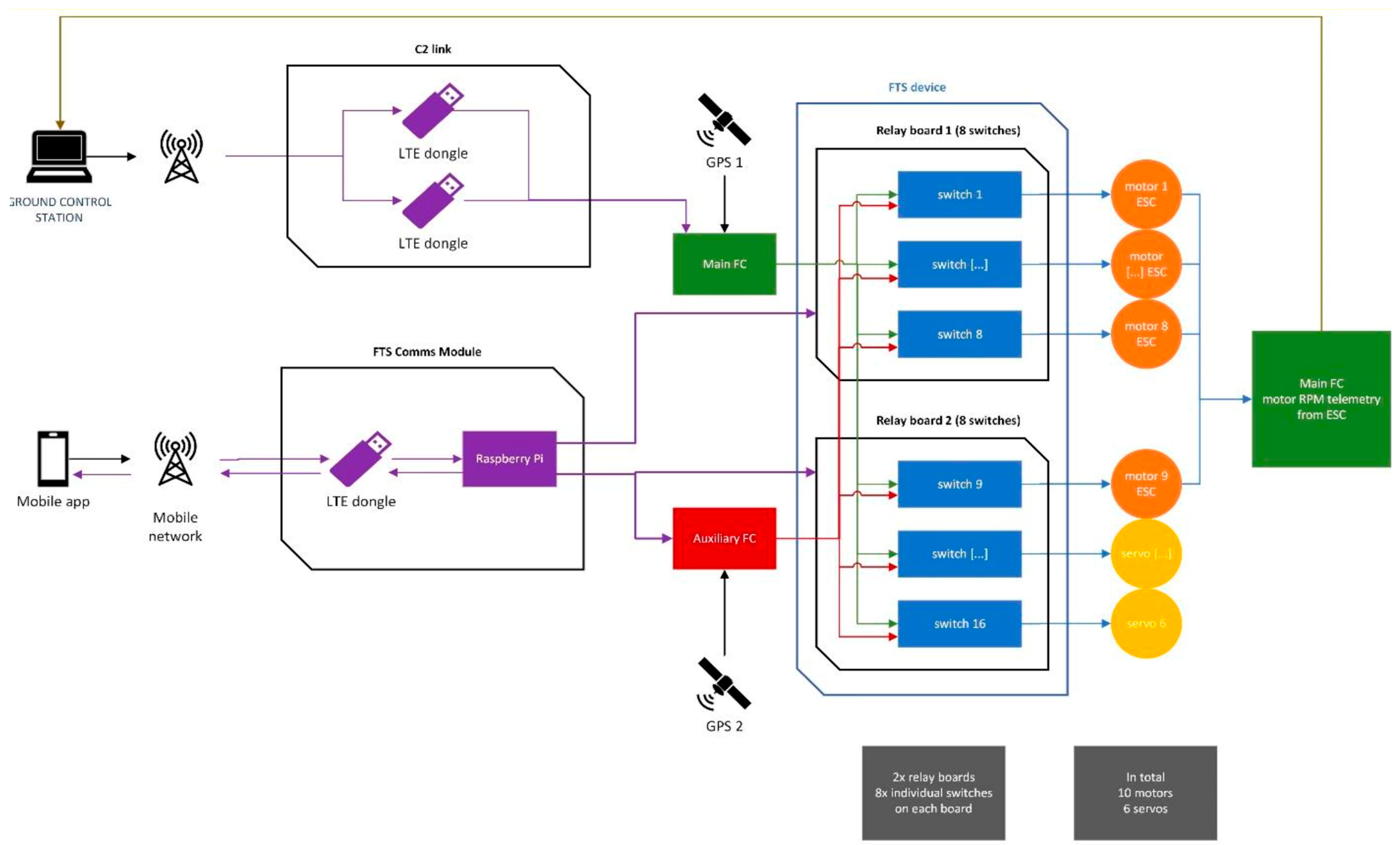
3.6. Functionality of the Flight Termination System (FTS)
3.7. Comparative Analysis of Drone and Automobile Transportation Environments
3.8. Overview of Hardware Components for Flight Termination System (FTS)
3.9. Control Parameters and Experiment Reliability
- Consistent Payload Weight: Each transportation mode was tested with a standardized payload weight of two kilograms, representing a typical medical sample package. This consistency ensured that variations in energy consumption and travel performance were due to the transportation mode rather than differences in payload.
- Route Selection: Identical routes were used for all transportation modes, with careful attention to distance, terrain, and traffic conditions. The routes were pre-selected to include both urban and rural segments, with variations in altitude to simulate real-world medical logistics scenarios. GPS tracking was employed to ensure precise adherence to these routes across all tests.
- Timing and Environmental Conditions: All tests were conducted during similar environmental conditions, particularly regarding temperature, wind speed, and precipitation, to eliminate these variables as confounding factors. Tests were scheduled during periods with consistent weather forecasts, and real-time monitoring ensured that any deviations were noted.
- Calibration of Equipment: Prior to each set of tests, all vehicles and drones were calibrated to ensure accurate measurement of energy consumption and travel time. Drones were calibrated using the Pixhawk 4 flight controller for stability, while electric and combustion vehicles had their onboard systems reset and checked for accuracy in fuel or energy consumption readings.
- Redundancy Checks: To verify the reliability of the data, multiple runs were conducted for each transportation mode, with at least three repetitions per route. The average values from these repetitions were used in the analysis to account for any anomalies or outliers.
- Energy Consumption Monitoring: The energy consumption of each transportation mode was carefully monitored using specific equipment. Drones utilized the Mauch Power Module for precise current and voltage measurement, while electric vehicles relied on their onboard systems, and combustion vehicles were monitored using the OBD-II diagnostic tool.
4. Presentation and Discussion of Results
4.1. CO2 Emissions Analysis
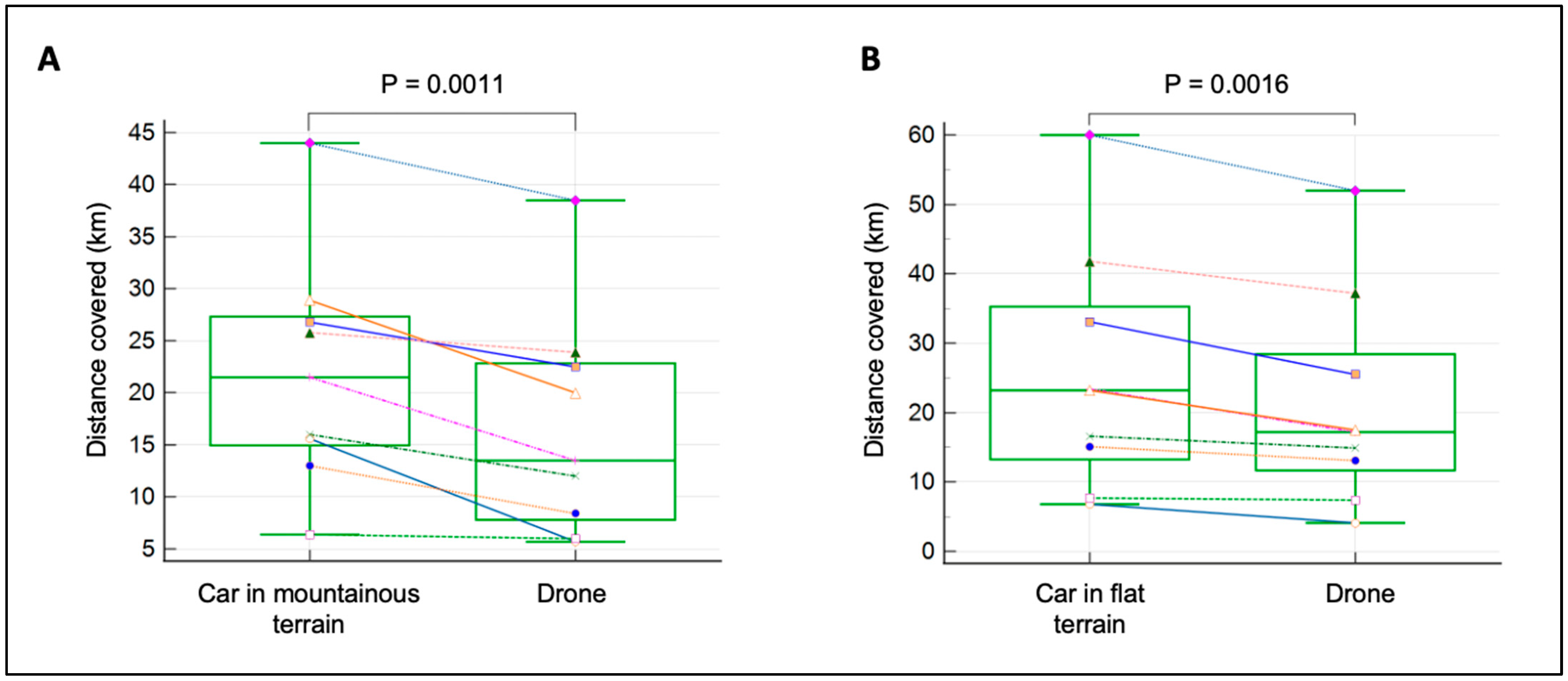
4.2. Transport Distance Efficiency
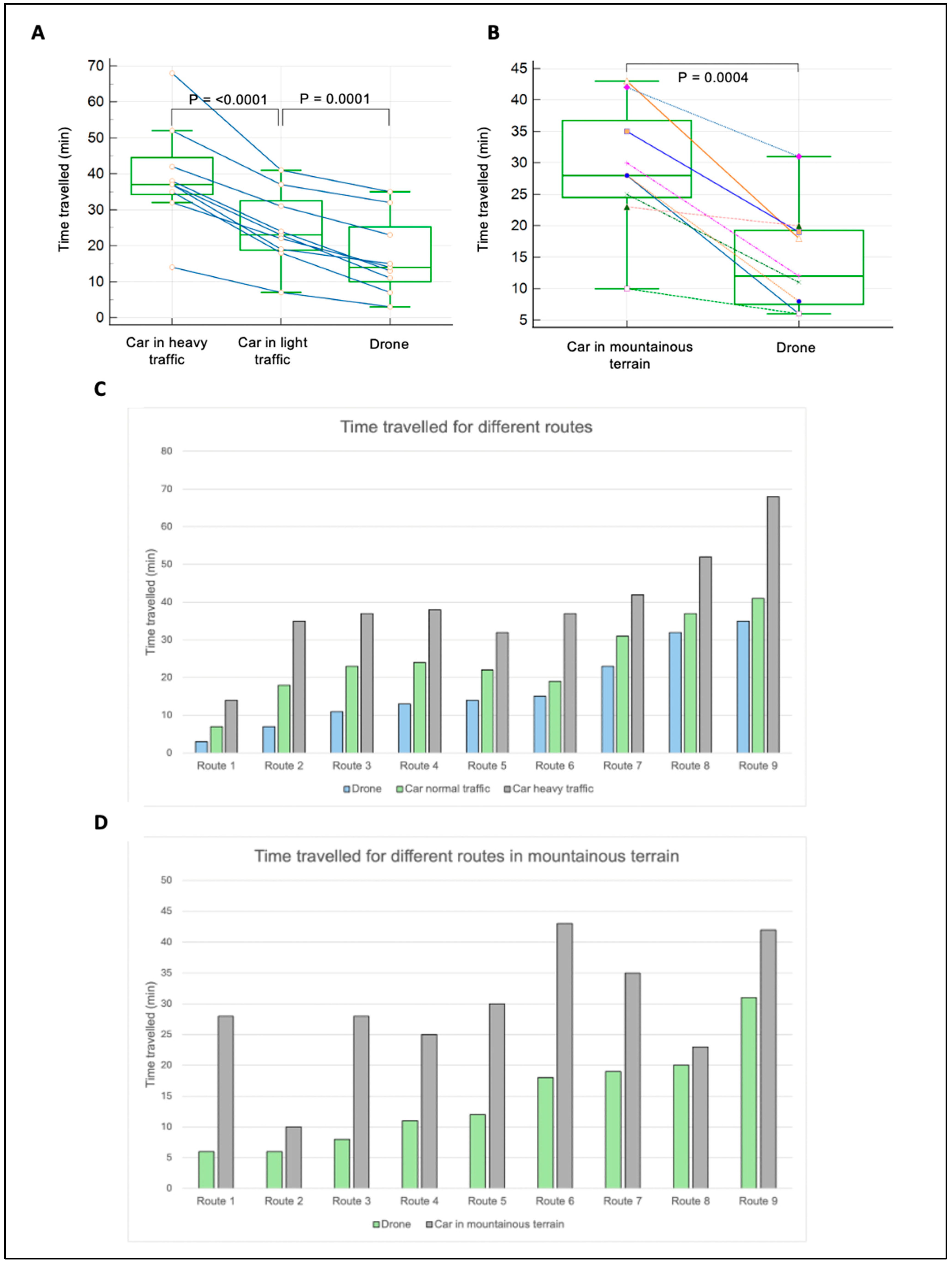
4.3. Delivery Time Efficiency
4.4. Implications for Healthcare Logistics
4.5. Comparative Analysis with Existing Studies
4.6. Efficiency and Benefits of Electric Vehicles and Drones
4.7. Logistical and Legal Challenges of Drone Use
4.8. Value and Significance of the Comparative Analysis
4.9. Cost Considerations in Healthcare Logistics
4.10. Limitations and Generalizability
4.11. Operational Constraints of Drones
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Angelov, S.; Jimenez, C.K.; Wall, V.; O’Croínin, D. An assessment of sustainable transport infrastructure in a national healthcare system. Surgeon 2023, 22, 203–208. [Google Scholar] [CrossRef] [PubMed]
- Berniak-Woźny, J.; Rataj, M. Towards green and sustainable healthcare: A literature review and research agenda for green leadership in the healthcare sector. Int. J. Environ. Res. Public Health 2023, 20, 908. [Google Scholar] [CrossRef] [PubMed]
- Cawthorne, D.; Robbins-Van Wynsberghe, A. From HealthDrone to FrugalDrone: Value-sensitive design of a blood sample transportation drone. In Proceedings of the 2019 IEEE International Symposium on Technology and Society (ISTAS), Boston, MA, USA, 15–16 November 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Lenzen, M.; Malik, A.; Li, M.; Fry, J.; Weisz, H.; Pichler, P.P.; Chaves, L.S.M.; Capon, A.; Pencheon, D. The environmental footprint of health care: A global assessment. Lancet Planet. Health 2020, 4, e271–e279. [Google Scholar] [CrossRef] [PubMed]
- Eckelman, M.J.; Sherman, J. Environmental impacts of the US health care system and effects on public health. PLoS ONE 2016, 11, e0157014. [Google Scholar] [CrossRef] [PubMed]
- Goodchild, A.; Toy, J. Delivery by drone: An evaluation of unmanned aerial vehicle technology in reducing CO2 emissions in the delivery service industry. Transp. Res. Part D Transp. Environ. 2018, 61, 58–67. [Google Scholar] [CrossRef]
- Magnusson, S.; Hagerfors, P.P. Drone Deliveries of Medical Goods in Urban Healthcare. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2019. [Google Scholar]
- Rashidzadeh, E.; Molana, S.M.H.; Soltani, R.; Hafezalkotob, A. Assessing the sustainability of using drone technology for last-mile delivery in a blood supply chain. J. Model. Manag. 2021, 16, 1376–1402. [Google Scholar] [CrossRef]
- Hur, S.H.; Won, M. CO2 emissions and delivery time of last-mile drone delivery using trucks. IET Intell. Transp. Syst. 2024, 18, 101–113. [Google Scholar] [CrossRef]
- Li, X.; Tupayachi, J.; Sharmin, A.; Ferguson, M.M. Drone-Aided Delivery Methods, Challenge, and the Future: A Methodological Review. Drones 2023, 7, 191. [Google Scholar] [CrossRef]
- Olatunji, G.M.; Isarinade, T.D.M.; Emmanuel, K.M.; Olatunji, D.M.; Aderinto, N.M. Exploring the transformative role of drone technology in advancing healthcare delivery in Africa; A perspective. Ann. Med. Surg. 2023, 85, 5279–5284. [Google Scholar] [CrossRef]
- Nybo, M.; Cadamuro, J.; Cornes, M.P.; Gómez Rioja, R.; Grankvist, K. Sample transportation—An overview. Diagnosis 2019, 6, 39–43. [Google Scholar] [CrossRef]
- Kuczewska, H.; Bartoszewski, B.; Ekiert-Radecka, M. Reduction of air pollution and solving the problem of effective delivery of medical products with autonomous drone delivery. In Proceedings of the 22nd SGEM International Multidisciplinary Scientific GeoConference, Albena, Bulgaria, 4–10 July 2022; pp. 391–398. [Google Scholar]
- Rodrigues, T.A.; Patrikar, J.; Oliveira, N.L.; Matthews, H.S.; Scherer, S.; Samaras, C. Drone flight data reveal energy and greenhouse gas emissions savings for very small package delivery. Patterns 2022, 3, 100569. [Google Scholar] [CrossRef] [PubMed]
- Lee, J. Optimization of a modular drone delivery system. In Proceedings of the 11th Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Park, J.; Kim, S.; Suh, K. A Comparative Analysis of the Environmental Benefits of Drone-Based Delivery Services in Urban and Rural Areas. Sustainability 2018, 10, 888. [Google Scholar] [CrossRef]
- Peck Palmer, O.M.; Wheeler, S.E.; Plebani, M.; Patterson, P.D.; Korpi-Steiner, N.L.; Martin, C. Recognition of the prehospital preanalytical phase: Collaborative efforts between laboratory medicine and emergency medicine to ensure quality testing. Clin. Chem. 2020, 66, 998–1005. [Google Scholar] [CrossRef] [PubMed]
- Paris Agreement. “Paris Agreement” Report of the Conference of the Parties to the United Nations Framework Convention on Climate Change (21st Session, 2015: Paris); HeinOnline: Getzville, NY, USA, 2015; Volume 4, No. 2017. [Google Scholar]
- Garg, V.; Niranjan, S.; Prybutok, V.; Pohlen, T.; Gligor, D. Drones in last-mile delivery: A systematic review on Efficiency, Accessibility, and Sustainability. Transp. Res. Part D Transp. Environ. 2023, 123, 103831. [Google Scholar] [CrossRef]
- Kim, S.J.; Lim, G.J.; Cho, J.; Côté, M.J. Drone-Aided Healthcare Services for Patients with Chronic Diseases in Rural Areas. J. Intell. Robot. Syst. 2017, 88, 163–180. [Google Scholar] [CrossRef]
- Nyaaba, A.A.; Ayamga, M. Intricacies of medical drones in healthcare delivery: Implications for Africa. Technol. Soc. 2021, 66, 101624. [Google Scholar] [CrossRef]
- Haula, K.; Agbozo, E. A systematic review on unmanned aerial vehicles in Sub-Saharan Africa: A socio-technical perspective. Technol. Soc. 2020, 63, 101357. [Google Scholar] [CrossRef]
- Jain, V.; Luthra, N. Medical assistance using drones for remote areas. In Proceedings of the International Conference on Artificial Intelligence and Applications: ICAIA, New Delhi, India, 6–7 February 2020; Springer: Singapore, 2021. [Google Scholar]
- Koshta, N.; Devi, Y.; Chauhan, C. Evaluating Barriers to the Adoption of Delivery Drones in Rural Healthcare Supply Chains: Preparing the Healthcare System for the Future. IEEE Trans. Eng. Manag. 2022, 71, 13096–13108. [Google Scholar] [CrossRef]
- Sudbury, A.W.; Hutchinson, E.B. A cost analysis of amazon prime air (drone delivery). J. Econ. Educ. 2016, 16, 1–12. [Google Scholar]
- Shen, Y.; Xu, X.; Zou, B.; Wang, H. Operating policies in multi-warehouse drone delivery systems. Int. J. Prod. Res. 2020, 59, 2140–2156. [Google Scholar] [CrossRef]
- Kreier, F. Drones bearing parcels deliver big carbon savings. Nature 2022. [Google Scholar] [CrossRef] [PubMed]
- Pani, A.; Mishra, S.; Golias, M.; Figliozzi, M. Evaluating public acceptance of autonomous delivery robots during COVID-19 pandemic. Transp. Res. Part D Transp. Environ. 2020, 89, 102600. [Google Scholar] [CrossRef]
- Šimenc, M. Overview and comparative analysis of emission calculators for inland shipping. Int. J. Sustain. Transp. 2015, 10, 627–637. [Google Scholar] [CrossRef]
- Shadimetov, Y.; Ayrapetov, D.; Ergashev, В. Transport, ecology and health. Transport 2021, 4, 17226–17230. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transportation Modality | Models/Technology |
|---|---|
| Combustion Cars | Mercedes Vito (2020), Renault Kangoo (2022), Peugeot 2008 (2021), 208 (2020), 308 (2023), VW Polo (2019), Citroen C3 (2022), Skoda Fabia (2019) |
| Electric Cars | Tesla Model 3 (2023), Tesla Model X (2021), |
| Drone | Hybrid drone from Jedsy.ch with glider technology, transitions to hover mode while landing |
| Aircraft Type | Unmanned Electric Aircraft, Capable of Vertical Takeoff and Landing (eVTOL) and Fixed-Wing Flight. x |
|---|---|
| Dimensions | 35 × 290 × 240 cm [H × W × L] |
| Weight | 18 kg empty incl. batteries |
| 21 kg max. gross takeoff weight (MGTOW) | |
| Propulsion | Hovering motors: 8 × 150 Kv motors with 22-inch propellers (IP 45 rating) |
| Cruising motors: 2 × 360 Kv motors with 12-inch propellers | |
| Avionics | 1 × 64 Bit ARM 6 Cores, 6 MB L2 + 4 MB L3, 8 GB RAM, 128-Bit-LPDDR4x 59.7 GB/s |
| 1 × 32 Bit ARM, 480 MHz, 2 MB memory, 512 KB RAM | |
| 1 × 32 Bit ARM, 24 MHz, 8 KB SRAM (3× Accelerometers/Gyros, 2× Barometers, 2× airspeed sensors, 1× GPS Module) | |
| 1 × 32 Bit ARM, 480 MHz, 2 MB memory, 512 KB RAM | |
| 1 × 32 Bit ARM, 72 MHz, 64 KB SRAM (2× Accelerometers/Gyros, 2× Barometers, 1× GPS Module) | |
| Awareness systems | 1× downward-facing awareness systems |
| 2× forward-facing awareness systems | |
| 1× LiDAR ground altimeter: downward facing for long-range | |
| Awareness radios | 1× ADS-B In |
| 1× FLARM in and out | |
| 1× remote ID, compliant with FAR Part 89 | |
| Connectivity (CON2) | 3× LTE SIM cards slots for three different providers |
| Flight modes | Multicopter mode and Fixed-wing mode |
| Cruise Speed | 59 KIAS (30 m/s) |
| Stall Speed (MGTOW) in Fixed-wing mode | 33 KIAS (17 m/s) |
| Max Density Altitude | 2438 m |
| Max Endurance | 118 min |
| Max Wind | 29 KTS (15 m/s) |
| Max Precipitation | Light to moderate |
| Operating time | Day Night (under dev) |
| Operating temperature | −20 °C to 50 °C |
| Range | max 120 km, 2 min hovering, 3 kg payload, 5 m/s of headwind, ideal cruising speed, 200 m AMSL, no altitude changes or curves, 10% reserve |
| Weather limitations | suitable for operation in coastal and offshore climate |
| no operation during heavy rain, icing conditions, hail, and thunderstorms | |
| Noise Emissions | While cruising at 60 m above ground level: 58 dB |
| Delivery methods | Mailbox docking on balcony or window (under development) |
| Ground landing | |
| Customer Privacy | The video transmitted to the pilot for landing is blurred at the source |
| Flight Planning | Details |
| Software Used | Pix4D and PX4 Autopilot |
| Flight Paths | Detailed paths planned to cover the entire study area, ensuring comprehensive coverage and data overlap |
| Altitude | Average altitude of 100 m (see Table 1 and Table 2 for specifics) |
| Flight Execution | Details |
| Number of Flights | 12 flights conducted over the study period |
| Duration | Each flight lasted approximately 30 min |
| Weather Conditions | Various conditions including light rain, winds (up to 40 km/h), and sunshine |
| Cruising Type | Horizontal Range | Vertical Range |
|---|---|---|
| Horizontally | 35 m on each side of the Flight Path. | |
| Vertically | 20 m above the Flight Path -> 120 m AGL | |
| Hovering Horizontally | 10 m on each side of the flight path. This accounts for the low speed of the aircraft. | |
| Hovering Vertically | 10 m above the Flight Path -> 40 m AGL This accounts for the low speed of the aircraft. |
| Cruising Type | Horizontal Range | Vertical Range |
|---|---|---|
| Horizontally | 35 m on each side of the Flight Path. | |
| Vertically | 20 m above the Flight Path -> 150 m AGL | |
| Hovering Horizontally | 10 m on each side of the flight geography | |
| Hovering Vertically | 10 m above the Flight Geography -> 50 m AGL |
| Condition | Range Tested | Performance Metrics | Equipment Used |
|---|---|---|---|
| Wind Speed | Up to 30 km/h (moderate wind) | Stable flight, minor adjustments required | Pixhawk 4 flight controller, Anemometer (Vortex) |
| Temperature | −5 °C to 35 °C | Maintained operational integrity, no temperature-related failures | Bosch BME280 sensor, Peltier coolers |
| Precipitation | Light rain (up to 2.5 mm/h) | No impact on flight; sealed components functioned as expected | IP67-rated sealed electronics, Hydrophobic coating |
| Humidity | 20% to 90% | No significant impact on drone electronics or flight | Bosch BME280 sensor |
| Altitude Changes | 0 to 500 m above sea level | Maintained consistent altitude control | LIDAR-Lite v3 sensor, Pixhawk 4 flight controller |
| Name of Route | Start and Destination | Start and Destination (GPS) |
|---|---|---|
| Route 1 | Buchs SG–Vaduz | 47.166668, 9.466664–47.134787, 9.513150 |
| Route 2 | Zürich Tiefenbrunnen–Zürich Oerlikon | 47.351448, 8.559639–47.406385, 8.542571 |
| Route 3 | Meilen–Zürich | 47.272483, 8.652122–47.351448, 8.559639 |
| Route 4 | Meilen–Rapperswil | 47.272483, 8.652122–47.220530, 8.843807 |
| Route 5 | Chur–Grüsch | 46.856858, 9.517722–46.977926, 9.644353 |
| Route 6 | Buchs SG–Mels | 47.166668, 9.466664–47.036573, 9.436659 |
| Route 7 | Glarus–Walenstadt | 47.036125, 9.065019–47.118043, 9.310155 |
| Route 8 | Buchs SG–Chur | 47.166668, 9.466664–46.856858, 9.517722 |
| Route 9 | Buchs SG–Stephanshorn SG | 47.166668, 9.466664–47.446111, 9.410633 |
| Name of Route | Start and Destination | Start and Destination (GPS) |
|---|---|---|
| Route 1 | Buchs SG–Gaflei | 47.166668, 9.466664–47.142344, 9.544172 |
| Route 2 | Meilen–Oetwil am See | 47.272483, 8.652122–47.267415, 8.728000 |
| Route 3 | Lugano–Bidogno | 46.023625, 8.961412–46.081164, 8.999985 |
| Route 4 | Buchs SG–Wildhaus | 47.166668, 9.466664–47.202323, 9.349811 |
| Route 5 | Buchs SG–Malbun | 47.166668, 9.466664–47.103642, 9.607433 |
| Route 6 | Chur–Arosa | 46.856858, 9.517722–46.784364, 9.683340 |
| Route 7 | Saas-Fee–Visp | 46.110250, 7.931477–46.297230, 7.874027 |
| Route 8 | Albula–Bonaduz | 46.663515, 9.575630–46.808014, 9.403732 |
| Route 9 | Davos–Landquart | 46.797116, 9.825824–46.961172, 9.566139 |
| Step | Action |
|---|---|
| 1 | The RPIC activates the FTS using a mobile phone app, which is segregated from the Ground Control Station (GCS). |
| 2 | The app sends the activation command through the mobile network to the FTS comms module installed on the aircraft, using a different network provider from the C2 link. |
| 3 | The FTS comms module activates the FTS device. |
| 4 | The FTS reroutes the motor and servo inputs to be controlled by the auxiliary Flight Controller, which is pre-programmed to stabilize and stop the aircraft in Hovering mode as quickly as possible (approx. 4G deceleration). |
| 5 | The aircraft navigates to the horizontal GPS location where the FTS was triggered, remaining in Hovering mode at a slow speed of 5 m/s. |
| 6 | The aircraft turns into the wind using the weathervane function to allow the Cruising motor to counter the wind more efficiently. |
| 7 | The aircraft slowly descends at 3 m/s or less until touchdown. |
| 8 | The aircraft is disarmed upon touchdown. |
| 9 | The RPIC can disable the FTS at any time using the same segregated trigger, regaining full control of the aircraft (only in the case of inadvertent activation). |
| Factor | Drone Transportation Environment | Automobile Transportation Environment |
|---|---|---|
| Temperature Control | Limited control; highly dependent on external weather conditions. | Typically more stable with better insulation and climate control. |
| Vibration Exposure | High due to aerial movement, especially during takeoff, landing, and flight. | Moderate to low; roads provide a relatively stable platform, though road quality can cause variations. |
| Speed | Variable; average cruising speed around 30 m/s (59 KIAS). | Variable; average speed ranges from 13 m/s (47 km/h) to urban areas to 27 m/s (100 km/h) on highways. |
| Altitude | Operates at varying altitudes (e.g., 100 m above ground). | Operates at ground level; altitude variation is negligible. |
| Environmental Exposure | Direct exposure to weather conditions (wind, rain, temperature). | Typically shielded from direct weather impacts due to the vehicle’s structure. |
| Impact of Weather | Significant; wind, rain, and temperature directly affect flight stability. | Minimal; vehicles are designed to operate in various weather conditions, though extreme conditions may affect safety. |
| Reliability of Transportation | Potentially affected by weather, requiring contingency planning. | Generally more reliable, with less susceptibility to environmental conditions. |
| Energy Efficiency | Dependent on altitude, payload, and wind conditions; can vary significantly. | Generally more consistent; efficiency depends on driving conditions and vehicle type. |
| Infrastructure Dependency | Requires minimal infrastructure (e.g., clear airspace, GPS). | Requires extensive road infrastructure and is subject to traffic conditions. |
| Component. | Details |
|---|---|
| FTS Device | Relay Modules (2×) |
| Specifications | - Relay switching current: approx. 8 × 60 mA - Operating voltage: 3.3 V to 5 V - 8x relay (DC: max. 30 V/10 A, AC: max. 250 V/10 A) - Relay with 3 contacts (change switch) - Direct control via microcontroller digital output - Header pin for control RM 2.54 mm - 8 × 3 screw terminals each for load connection - 8× status LED for relay status - 4× mounting holes 3 mm - Size: 138 × 50 × 19 mm - Weight: 105 g |
| FTS Comms Module | LTE Dongle |
| Features | - Provides LTE connectivity for communication - Compact and easy to integrate with the FTS system |
| Key Attributes | - BCM 2835 SOC @ 1 GHz - 512 MB RAM - Onboard wireless LAN (2.4 GHz 802.11 b/g/n) - Onboard Bluetooth 4.1 + HS Low-energy (BLE) - micro-SD slot - mini HDMI type C connection - 1x micro-B USB for data - 1x micro-B USB for power supply - CSI Camera Connector - Equipped 40-pin GPIO connector - Compatible with pHAT/HAT boards - Dimensions: 65 × 30 × 5 mm |
| Auxiliary FC | Holybro Pixhawk 6C |
| Core Components | Processors and Sensors: - FMU Processor: STM32H743 (32 Bit Arm® Cortex®-M7, 480 MHz, 2 MB memory, 1 MB SRAM) - IO Processor: STM32F103 (32 Bit Arm® Cortex®-M3, 72 MHz, 64 KB SRAM) - Accel/Gyro: ICM-42688-P, BMI055 - Mag: IST8310 - Barometer: MS5611 Physical Dimensions: - Dimensions: 84.8 × 44 × 12.4 mm - Weight (Plastic Case): 34.6 g - Operating temperature: −40 °C to 85 °C |
| Platform | NVIDIA Jetson Xavier NX KI System-on-Modul |
| System Details | - High-performance AI computing module - Supports a wide range of AI workloads - Compatible with Jetson Xavier NX/Nano/TX2 NX |
| Parameter | Standardization | Equipment Used |
|---|---|---|
| Payload Weight | 2 kg (standardized medical sample package) | Calibrated digital scale |
| Route Selection | Identical routes for all tests | GPS tracking via Pixhawk 4 and vehicle onboard systems |
| Timing and Environmental Conditions | Similar conditions across all tests | Bosch BME280 sensor, weather forecasting tools |
| Calibration of Equipment | Pre-test calibration of all equipment | Pixhawk 4 (drones), OBD-II (vehicles) |
| Redundancy Checks | Minimum of 3 runs per route | Data averaging software |
| Energy Consumption Monitoring | Real-time monitoring during tests | Mauch Power Module (drones), vehicle onboard systems, OBD-II |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stierlin, N.; Loertscher, F.; Renz, H.; Risch, L.; Risch, M. A Green Laboratory Approach to Medical Sample Transportation: Assessing the Carbon Dioxide (CO2) Footprint of Medical Sample Transportation by Drone, Combustion Car, and Electric Car. Drones 2024, 8, 489. https://doi.org/10.3390/drones8090489
Stierlin N, Loertscher F, Renz H, Risch L, Risch M. A Green Laboratory Approach to Medical Sample Transportation: Assessing the Carbon Dioxide (CO2) Footprint of Medical Sample Transportation by Drone, Combustion Car, and Electric Car. Drones. 2024; 8(9):489. https://doi.org/10.3390/drones8090489
Chicago/Turabian StyleStierlin, Noel, Fabian Loertscher, Harald Renz, Lorenz Risch, and Martin Risch. 2024. "A Green Laboratory Approach to Medical Sample Transportation: Assessing the Carbon Dioxide (CO2) Footprint of Medical Sample Transportation by Drone, Combustion Car, and Electric Car" Drones 8, no. 9: 489. https://doi.org/10.3390/drones8090489