
Utilizing the Finite Fourier Series to Generate Quadrotor Trajectories Through Multiple Waypoints


Abstract
1. Introduction
2. Methods
2.1. Formulation of Fixed-Time, Minimum-Snap Trajectory Optimization Problems
2.1.1. Generalization of the Polynomial and FFS Parameterizations
Polynomial Parameterization
FFS Parameterization
2.1.2. Key Differences Between Polynomial and FFS Parameterizations
2.1.3. Deriving Analytic Solution for Fixed-Time Problem
2.2. Time-Allocation Problem
2.3. Simulation and Experimental Setup
3. Numerical Results
3.1. Fixed-Time Solutions
3.1.1. “Simple” Trajectory
3.1.2. “3 Blocks” Trajectory
3.1.3. “Square” Trajectory
3.1.4. “Circle” Trajectory
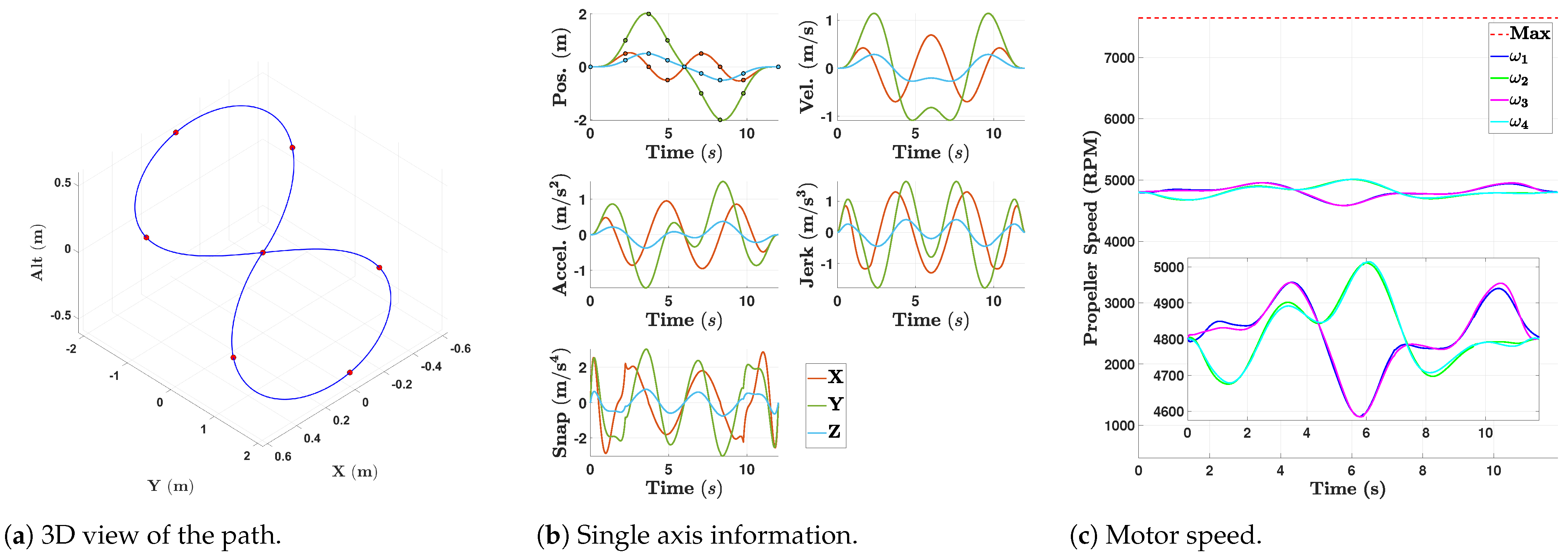
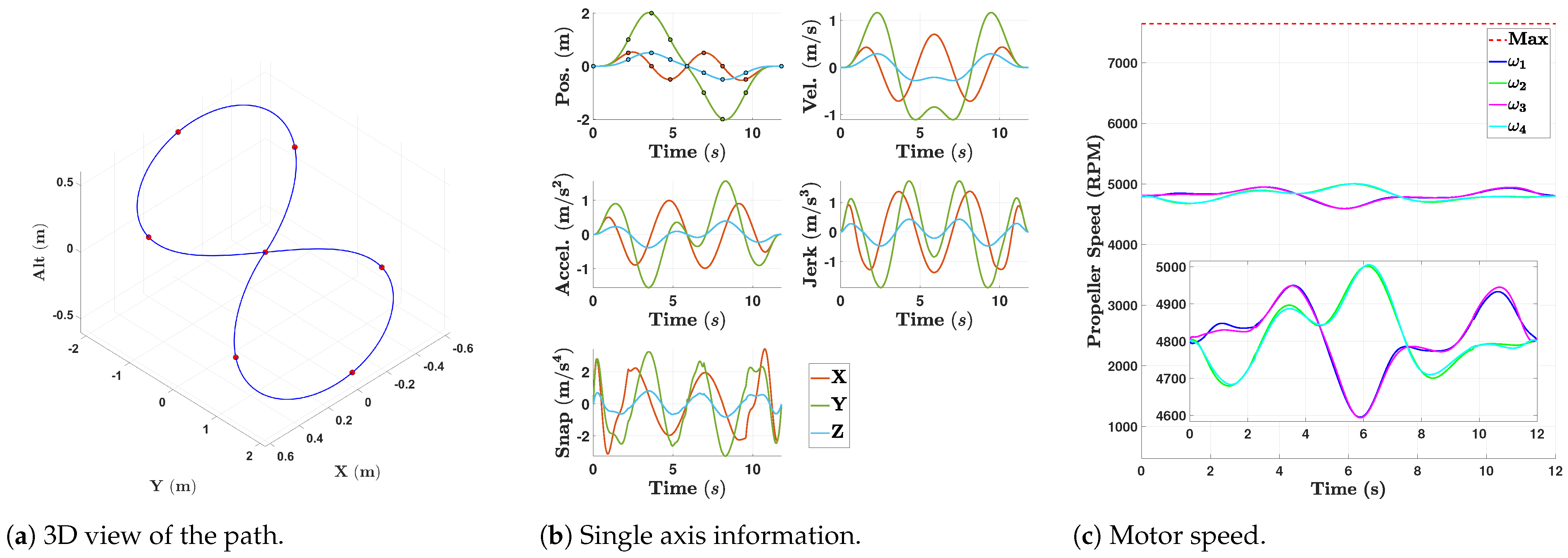
3.1.5. “Eight” Trajectory
3.1.6. Summary of the Fixed-Time Trajectories
3.2. Time-Allocated Solutions
3.2.1. “Simple” and “3 Blocks” Trajectories
3.2.2. “Square” Trajectory
3.2.3. “Circle” Trajectory
3.2.4. “Eight” Trajectory
3.3. Numerical Results Summary in Practical Context
4. Experimental Results
4.1. “3 Blocks” Trajectory
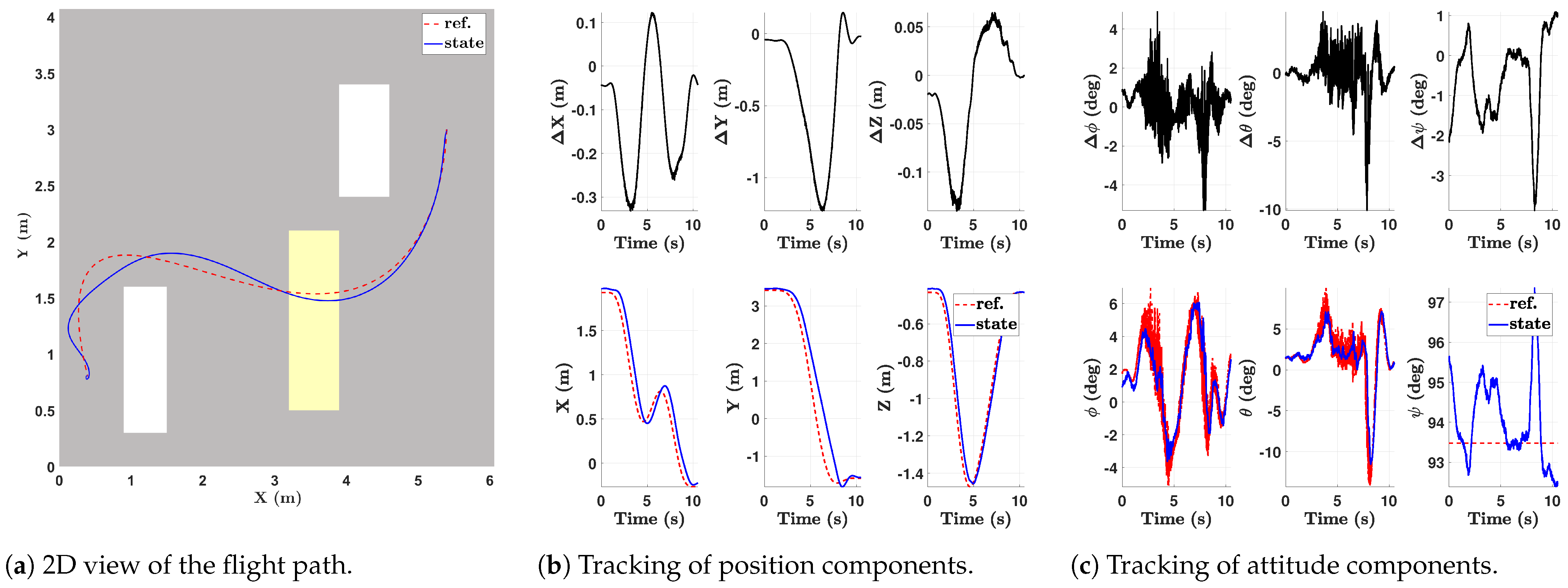
4.2. “Square” Trajectory
4.3. Notes on Numerical Convergence
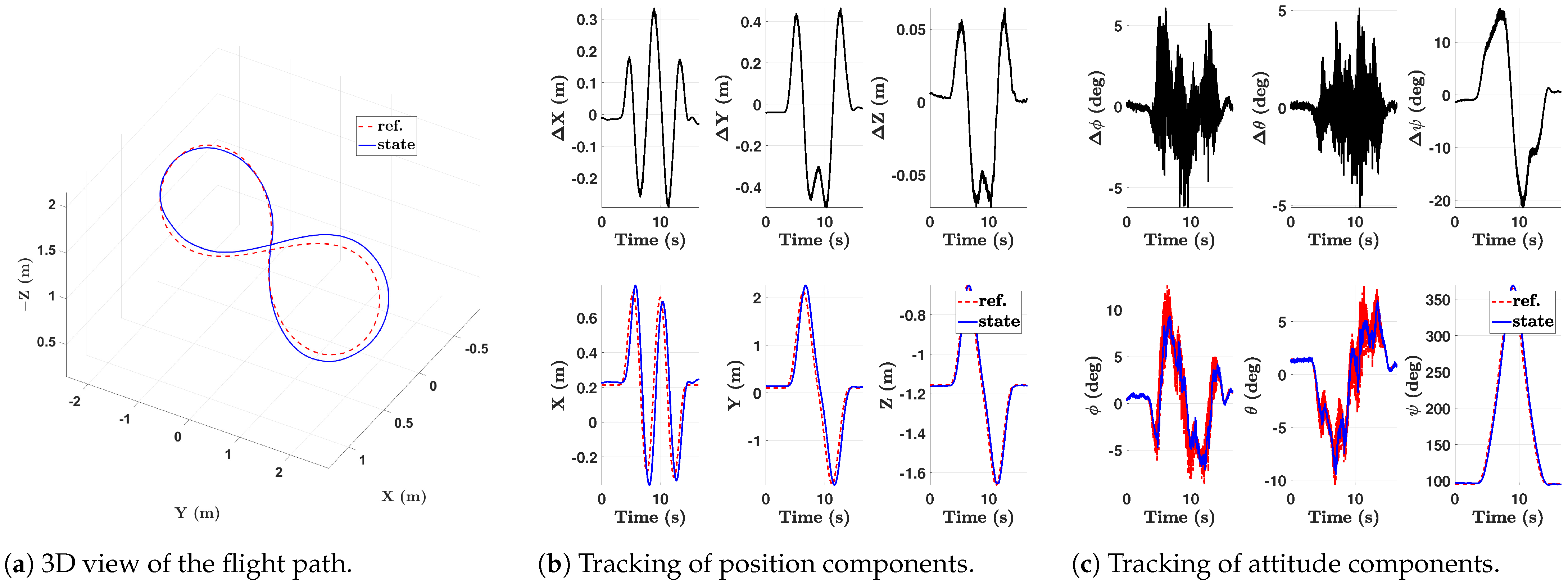
4.4. “Eight” Trajectory
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- “Simple” trajectory:.
- “Eight” trajectory:;;;;;;;;.
- “Square” trajectory:;;;;;;;;.
- “Circle” trajectory:;;;;;;;.
- “3 Blocks” trajectory:;;;;.
References
- Goerzen, C.; Kong, Z.; Mettler, B. A Survey of Motion Planning Algorithms from the Perspective of Autonomous UAV Guidance. J. Intell. Robot. Syst. 2010, 57, 65–100. [Google Scholar] [CrossRef]
- Kawamura, E.; Azimov, D. Integrated Extremal Control and Explicit Guidance for Quadcopters. J. Intell. Robot. Syst. 2020, 100, 1583–1613. [Google Scholar] [CrossRef]
- Paredes, J.; Sharma, P.; Ha, B.; Lanchares, M.; Atkins, E.; Gaskell, P.; Kolmanovsky, I. Development, implementation, and experimental outdoor evaluation of quadcopter controllers for computationally limited embedded systems. Annu. Rev. Control 2021, 52, 372–389. [Google Scholar] [CrossRef]
- Vargas-Ramírez, N.; Paneque-Gálvez, J. The Global Emergence of Community Drones (2012–2017). Drones 2019, 3, 76. [Google Scholar] [CrossRef]
- Trélat, E. Optimal Control and Applications to Aerospace: Some Results and Challenges. J. Optim. Theory Appl. 2012, 154, 713–758. [Google Scholar] [CrossRef]
- Williams, P. Three-Dimensional Aircraft Terrain-Following via Real-Time Optimal Control. J. Guid. Control Dyn. 2007, 30, 1201–1206. [Google Scholar] [CrossRef]
- Quan, L.; Han, L.; Zhou, B.; Shen, S.; Gao, F. Survey of UAV motion planning. IET Cyber-Syst. Robot. 2020, 2, 14–21. [Google Scholar] [CrossRef]
- Karelahti, J.; Virtanen, K.; Öström, J. Automated Generation of Realistic Near-Optimal Aircraft Trajectories. J. Guid. Control Dyn. 2008, 31, 674–688. [Google Scholar] [CrossRef]
- Hii, M.S.Y.; Courtney, P.; Royall, P.G. An Evaluation of the Delivery of Medicines Using Drones. Drones 2019, 3, 52. [Google Scholar] [CrossRef]
- Benarbia, T.; Kyamakya, K. A Literature Review of Drone-Based Package Delivery Logistics Systems and Their Implementation Feasibility. Sustainability 2022, 14, 360. [Google Scholar] [CrossRef]
- Kotlinski, M.; Calkowska, J.K. U-Space and UTM Deployment as an Opportunity for More Complex UAV Operations Including UAV Medical Transport. J. Intell. Robot. Syst. 2022, 106, 12. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Savkin, A.V.; Huang, C. A New Parcel Delivery System with Drones and a Public Train. J. Intell. Robot. Syst. 2020, 100, 1341–1354. [Google Scholar] [CrossRef]
- Munawar, H.S.; Ullah, F.; Heravi, A.; Thaheem, M.J.; Maqsoom, A. Inspecting Buildings Using Drones and Computer Vision: A Machine Learning Approach to Detect Cracks and Damages. Drones 2022, 6, 5. [Google Scholar] [CrossRef]
- Detka, J.; Coyle, H.; Gomez, M.; Gilbert, G.S. A Drone-Powered Deep Learning Methodology for High Precision Remote Sensing in California’s Coastal Shrubs. Drones 2023, 7, 421. [Google Scholar] [CrossRef]
- Viegas, C.; Chehreh, B.; Andrade, J.; Lourenço, J. Tethered UAV with Combined Multi-rotor and Water Jet Propulsion for Forest Fire Fighting. J. Intell. Robot. Syst. 2022, 104, 21. [Google Scholar] [CrossRef]
- Amponis, G.; Lagkas, T.; Zevgara, M.; Katsikas, G.; Xirofotos, T.; Moscholios, I.; Sarigiannidis, P. Drones in B5G/6G Networks as Flying Base Stations. Drones 2022, 6, 39. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms, 1st ed.; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar] [CrossRef]
- Siméon, T.; Laumond, J.P.; Nissoux, C. Visibility-based probabilistic roadmaps for motion planning. Adv. Robot. 2000, 14, 477–493. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Frazzoli, E.; Dahleh, M.A.; Feron, E. Real-Time Motion Planning for Agile Autonomous Vehicles. J. Guid. Control Dyn. 2002, 25, 116–129. [Google Scholar] [CrossRef]
- Zinage, V.V.; Ghosh, S. Generalized Shape Expansion-Based Motion Planning in Three-Dimensional Obstacle-Cluttered Environment. J. Guid. Control Dyn. 2020, 43, 1781–1791. [Google Scholar] [CrossRef]
- Liu, H.; Suzuki, S. Model-Free Guidance Method for Drones in Complex Environments Using Direct Policy Exploration and Optimization. Drones 2023, 7, 514. [Google Scholar] [CrossRef]
- Elmokadem, T.; Savkin, A.V. Towards Fully Autonomous UAVs: A Survey. Sensors 2021, 21, 6223. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, K.; Schoedel, S.; Alavilli, A.; Plancher, B.; Manchester, Z. TinyMPC: Model-Predictive Control on Resource-Constrained Microcontrollers. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 1–7. [Google Scholar] [CrossRef]
- Betts, J.T. Survey of Numerical Methods for Trajectory Optimization. J. Guid. Control Dyn. 1998, 21, 193–207. [Google Scholar] [CrossRef]
- Faiz, N.; Agrawal, S.K.; Murray, R.M. Trajectory Planning of Differentially Flat Systems with Dynamics and Inequalities. J. Guid. Control Dyn. 2001, 24, 219–227. [Google Scholar] [CrossRef]
- Faessler, M.; Franchi, A.; Scaramuzza, D. Differential Flatness of Quadrotor Dynamics Subject to Rotor Drag for Accurate Tracking of High-Speed Trajectories. IEEE Robot. Autom. Lett. 2018, 3, 620–626. [Google Scholar] [CrossRef]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar] [CrossRef]
- Invernizzi, D.; Panza, S.; Lovera, M. Robust Tuning of Geometric Attitude Controllers for Multirotor Unmanned Aerial Vehicles. J. Guid. Control Dyn. 2020, 43, 1332–1343. [Google Scholar] [CrossRef]
- Mueller, M.W.; Hehn, M.; D’Andrea, R. A Computationally Efficient Motion Primitive for Quadrocopter Trajectory Generation. IEEE Trans. Robot. 2015, 31, 1294–1310. [Google Scholar] [CrossRef]
- Betts, J.T.; Huffman, W.P. Path-constrained trajectory optimization using sparse sequential quadratic programming. J. Guid. Control Dyn. 1993, 16, 59–68. [Google Scholar] [CrossRef]
- Du, R.; Cowlagi, R.V. Interactive Sensing and Planning for a Quadrotor Vehicle in Partially Known Environments. J. Guid. Control Dyn. 2019, 42, 1601–1611. [Google Scholar] [CrossRef]
- Luo, Y.; Lu, J.; Zhang, Y.; Qin, Q.; Liu, Y. 3D JPS Path Optimization Algorithm and Dynamic-Obstacle Avoidance Design Based on Near-Ground Search Drone. Appl. Sci. 2022, 12, 7333. [Google Scholar] [CrossRef]
- Aldao, E.; González-deSantos, L.M.; Michinel, H.; González-Jorge, H. UAV Obstacle Avoidance Algorithm to Navigate in Dynamic Building Environments. Drones 2022, 6, 16. [Google Scholar] [CrossRef]
- Hong, Y.; Kim, S.; Kim, Y.; Cha, J. Quadrotor path planning using A* search algorithm and minimum snap trajectory generation. ETRI J. 2021, 43, 1013–1023. [Google Scholar] [CrossRef]
- Zhou, B.; Gao, F.; Wang, L.; Liu, C.; Shen, S. Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight. IEEE Robot. Autom. Lett. 2019, 4, 3529–3536. [Google Scholar] [CrossRef]
- Robinson, D.R.; Mar, R.T.; Estabridis, K.; Hewer, G. An Efficient Algorithm for Optimal Trajectory Generation for Heterogeneous Multi-Agent Systems in Non-Convex Environments. IEEE Robot. Autom. Lett. 2018, 3, 1215–1222. [Google Scholar] [CrossRef]
- Lee, E.M.; Choi, J.; Lim, H.; Myung, H. REAL: Rapid Exploration with Active Loop-Closing toward Large-Scale 3D Mapping using UAVs. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4194–4198. [Google Scholar] [CrossRef]
- Richter, C.; Bry, A.; Roy, N. Polynomial Trajectory Planning for Aggressive Quadrotor Flight in Dense Indoor Environments. Robot. Res. 2016, 114, 649–666. [Google Scholar] [CrossRef]
- Bry, A.; Richter, C.; Bachrach, A.; Roy, N. Aggressive flight of fixed-wing and quadrotor aircraft in dense indoor environments. Int. J. Robot. Res. 2015, 34, 969–1002. [Google Scholar] [CrossRef]
- Sabetghadam, B.; Cunha, R.; Pascoal, A. A Distributed Algorithm for Real-Time Multi-Drone Collision-Free Trajectory Replanning. Sensors 2022, 22, 1855. [Google Scholar] [CrossRef]
- Yakimenko, O.A. Direct Method for Rapid Prototyping of Near-Optimal Aircraft Trajectories. J. Guid. Control Dyn. 2000, 23, 865–875. [Google Scholar] [CrossRef]
- Kreciglowa, N.; Karydis, K.; Kumar, V. Energy efficiency of trajectory generation methods for stop-and-go aerial robot navigation. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 656–662. [Google Scholar] [CrossRef]
- Hehn, M.; D’Andrea, R. Real-Time Trajectory Generation for Quadrocopters. IEEE Trans. Robot. 2015, 31, 877–892. [Google Scholar] [CrossRef]
- Almeida, M.M.D.; Moghe, R.; Akella, M. Real-Time Minimum Snap Trajectory Generation for Quadcopters: Algorithm Speed-up Through Machine Learning. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 683–689. [Google Scholar] [CrossRef]
- Burke, D.; Chapman, A.; Shames, I. Generating Minimum-Snap Quadrotor Trajectories Really Fast. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 1487–1492. [Google Scholar] [CrossRef]
- Wang, Z.; Ye, H.; Xu, C.; Gao, F. Generating Large-Scale Trajectories Efficiently using Double Descriptions of Polynomials. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 7436–7442, ISSN 2577-087X. [Google Scholar] [CrossRef]
- Paris, A.; Lopez, B.T.; How, J.P. Dynamic Landing of an Autonomous Quadrotor on a Moving Platform in Turbulent Wind Conditions. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9577–9583. [Google Scholar] [CrossRef]
- Shi, D.; Shen, J.; Gao, M.; Yang, X. A Multi-Waypoint Motion Planning Framework for Quadrotor Drones in Cluttered Environments. Drones 2024, 8, 414. [Google Scholar] [CrossRef]
- Penicka, R.; Scaramuzza, D. Minimum-Time Quadrotor Waypoint Flight in Cluttered Environments. IEEE Robot. Autom. Lett. 2022, 7, 5719–5726. [Google Scholar] [CrossRef]
- Foehn, P.; Romero, A.; Scaramuzza, D. Time-optimal planning for quadrotor waypoint flight. Sci. Robot. 2021, 6, eabh1221. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Lin, Z.; Wang, Y.; Huang, W.; Yan, B.; Li, Y. Three-body cooperative active defense guidance law with overload constraints: A small speed ratio perspective. Chin. J. Aeronaut. 2025, 38, 103171. [Google Scholar] [CrossRef]
- Taheri, E.; Abdelkhalik, O. Shape Based Approximation of Constrained Low-Thrust Space Trajectories using Fourier Series. J. Spacecr. Rocket. 2012, 49, 535–546. [Google Scholar] [CrossRef]
- Taheri, E.; Abdelkhalik, O. Fast Initial Trajectory Design for Low-Thrust Restricted-Three-Body Problems. J. Guid. Control Dyn. 2015, 38, 2146–2160. [Google Scholar] [CrossRef]
- Taheri, E.; Abdelkhalik, O. Initial three-dimensional low-thrust trajectory design. Adv. Space Res. 2016, 57, 889–903. [Google Scholar] [CrossRef]
- Taheri, E.; Kolmanovsky, I.; Atkins, E. Shaping low-thrust trajectories with thrust-handling feature. Adv. Space Res. 2018, 61, 879–890. [Google Scholar] [CrossRef]
- Huo, M.; Zhang, G.; Qi, N.; Liu, Y.; Shi, X. Initial Trajectory Design of Electric Solar Wind Sail Based on Finite Fourier Series Shape-Based Method. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3674–3683. [Google Scholar] [CrossRef]
- Fan, Z.; Huo, M.; Qi, N.; Xu, Y.; Song, Z. Fast preliminary design of low-thrust trajectories for multi-asteroid exploration. Aerosp. Sci. Technol. 2019, 93, 105295. [Google Scholar] [CrossRef]
- Zhou, W.; Li, H.; Wang, H.; Ding, R. Low-Thrust Trajectory Design Using Finite Fourier Series Approximation of Pseudoequinoctial Elements. Int. J. Aerosp. Eng. 2019, 2019, 1–18. [Google Scholar] [CrossRef]
- Caruso, A.; Bassetto, M.; Mengali, G.; Quarta, A.A. Optimal solar sail trajectory approximation with finite Fourier series. Adv. Space Res. 2021, 67, 2834–2843. [Google Scholar] [CrossRef]
- Nurre, N.P.; Taheri, E. Multiple gravity-assist low-thrust trajectory design using finite Fourier series. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, South Lake Tahoe, CA, USA, 9–13 August 2020; AAS 20-671. p. 21. [Google Scholar]
- Kovryzhenko, Y.; Taheri, E. Comparison of minimum-snap and finite fourier series methods for multi-copter motion planning. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA & Virtual, 3–7 January 2022. [Google Scholar] [CrossRef]
- Kovryzhenko, Y. Application of the Finite Fourier Series for Smooth Motion Planning of Quadrotors. Master’s Thesis, Auburn University, Auburn, AL, USA, 2023. [Google Scholar]
- Kovryzhenko, Y.; Li, N.; Taheri, E. A Control System Design and Implementation for Autonomous Quadrotors with Real-Time Re-Planning Capability. Robotics 2024, 13, 136. [Google Scholar] [CrossRef]
- Kovryzhenko, Y.; Li, N.; Taheri, E. Implementation of a Data-Driven Control Method for Unmanned Aerial Vehicles. In Proceedings of the AIAA Aviation Forum and ASCEND, Las Vegas, NV, USA, 29 July–2 August 2024; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2024. [Google Scholar] [CrossRef]
- Levine, J. Analysis and Control of Nonlinear Systems: A Flatness-Based Approach; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Kyriakopoulos, K.; Saridis, G. Minimum jerk path generation. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; Volume 1, pp. 364–369. [Google Scholar] [CrossRef]
- Piazzi, A.; Visioli, A. Global minimum-jerk trajectory planning of robot manipulators. IEEE Trans. Ind. Electron. 2000, 47, 140–149. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Method | T (s) | (ms) | J | P (W) | ||||
|---|---|---|---|---|---|---|---|---|---|
| Simple | Polys | 4 | 1 | 1 | 10 | 3 | 0.37 | 301.68 | 425.60 |
| FFS | 4 | 1 | 1 | 10 | 3 | 0.62 | 400.04 | 426.36 | |
| 3 Blocks | Polys | 4 | 3 | 4 | 120 | 9 | 0.85 | 90.07 | 1269.97 |
| FFS | 4 | 3 | 4 | 120 | 9 | 1.25 | 93.85 | 1270.27 | |
| Square | Polys | 4 | 2 | 8 | 160 | 10 | 0.91 | 1174.49 | 1417.68 |
| FFS | 4 | 2 | 8 | 160 | 10 | 1.26 | 1287.14 | 1418.52 | |
| Circle | Polys | 4 | 2 | 7 | 140 | 10 | 0.85 | 1840.02 | 1435.62 |
| FFS | 4 | 2 | 7 | 140 | 10 | 1.22 | 2004.76 | 1437.65 | |
| Eight | Polys | 4 | 4 | 9 | 360 | 30 | 1.38 | 1.05 | 4200.38 |
| FFS | 4 | 4 | 9 | 360 | 30 | 2.48 | 1.15 | 4200.42 |
| Name | Method | T (s) | (ms) | J | P (W) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Simple | Polys | 4 | 1 | 1 | 10 | 3.00 | 5.05 | 300.21 | 425.59 | 700 | 5 |
| FFS | 4 | 1 | 1 | 10 | 3.10 | 9.09 | 310.99 | 439.68 | 700 | 6 | |
| FFS | 4 | 1 | 1 | 10 | 3.00 | 13.59 | 398.75 | 426.35 | 930 | 5 | |
| 3 Blocks | Polys | 4 | 3 | 4 | 120 | 10.00 | 305.00 | 8.79 | 1403.42 | 6.15 | 34 |
| FFS | 4 | 3 | 4 | 120 | 10.10 | 252.69 | 8.88 | 1417.40 | 6.15 | 22 | |
| FFS | 4 | 3 | 4 | 120 | 10.00 | 285.33 | 9.53 | 1403.52 | 6.67 | 23 | |
| Square | Polys | 4 | 2 | 8 | 160 | 10.00 | 423.99 | 200.02 | 1411.97 | 140 | 35 |
| FFS | 4 | 2 | 8 | 160 | 10.04 | 609.74 | 200.87 | 1417.61 | 140 | 32 | |
| FFS | 4 | 2 | 8 | 160 | 10.00 | 563.42 | 205.89 | 1412.14 | 144 | 29 | |
| Circle | Polys | 4 | 2 | 7 | 140 | 10.00 | 306.61 | 54.03 | 1420.25 | 37.8 | 30 |
| FFS | 4 | 2 | 7 | 140 | 10.07 | 528.96 | 54.38 | 1430.07 | 37.8 | 32 | |
| FFS | 4 | 2 | 7 | 140 | 10.00 | 469.94 | 56.89 | 1420.67 | 39.8 | 27 | |
| Eight | Polys | 4 | 4 | 9 | 360 | 12.00 | 515.74 | 85.72 | 1692.22 | 50 | 22 |
| FFS | 4 | 4 | 9 | 360 | 12.05 | 895.02 | 86.11 | 1699.25 | 50 | 24 | |
| FFS | 4 | 4 | 9 | 360 | 12.00 | 892.07 | 88.81 | 1665.06 | 51.8 | 23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kovryzhenko, Y.; Taheri, E. Utilizing the Finite Fourier Series to Generate Quadrotor Trajectories Through Multiple Waypoints. Drones 2025, 9, 77. https://doi.org/10.3390/drones9010077
Kovryzhenko Y, Taheri E. Utilizing the Finite Fourier Series to Generate Quadrotor Trajectories Through Multiple Waypoints. Drones. 2025; 9(1):77. https://doi.org/10.3390/drones9010077
Chicago/Turabian StyleKovryzhenko, Yevhenii, and Ehsan Taheri. 2025. "Utilizing the Finite Fourier Series to Generate Quadrotor Trajectories Through Multiple Waypoints" Drones 9, no. 1: 77. https://doi.org/10.3390/drones9010077
APA StyleKovryzhenko, Y., & Taheri, E. (2025). Utilizing the Finite Fourier Series to Generate Quadrotor Trajectories Through Multiple Waypoints. Drones, 9(1), 77. https://doi.org/10.3390/drones9010077