

Optimization of Bandwidth Allocation and UAV Placement in Active RIS-Assisted UAV Communication Networks with Wireless Backhaul



Abstract
1. Introduction
1.1. Related Work
1.1.1. UAV Communication Systems with Wireless Backhaul
1.1.2. ARIS-Assisted UAV Communication Systems
1.2. Contributions and Outline
- We introduce a novel communication architecture that integrates UAVs with ARIS in a wireless backhaul system. This framework establishes an optimized approach to improving the efficiency and capacity of DL communications.
- We formulate a comprehensive optimization problem optimized approach to the sum rate across all users in the DL network. This problem involves the intricate interplay of UAV placement, transmit power, ARIS reflection coefficients, and resource allocation strategies, resulting in a highly non-convex and computationally challenging problem.
- To address this complexity, we adopt the block coordinate ascent (BCA) method to decompose the primary problem into three interrelated sub-problems and leverage inner approximation (IA) techniques to effectively handle the non-convexity inherent in each sub-problem. Additionally, a holistic algorithm based on the alternating optimization (AO) framework is developed to solve these sub-problems iteratively.
- Through extensive simulations, we validate the performance of the proposed system, demonstrating its superiority over traditional methods. The results reveal that our approach significantly outperforms systems utilizing PRIS or fixed UAV placements, enhancing network performance and ensuring robust connectivity between the UAV and users through ARIS.
2. System Model and Problem Formulation
2.1. Channel Model
2.1.1. Backhaul Link
2.1.2. Access Link
2.2. Signal Model
2.3. Problem Formulation
3. Proposed Alternating Optimization Algorithm
- For the quadratic function , , a lower bound at iteration -th can be derived using [33] as
- For the power function , , an upper bound at iteration -th is given as [43]
- For the bilinear function , , known as the multiplicative function, an upper bound at iteration -th can be expressed as [33]
- For the bilinear function , an upper bound at iteration -th is derived as [33]
3.1. Optimization of , , and with Given and
3.2. Optimization of with Given , , , and
3.3. Optimization of with Given , , , and
3.4. Generation of Initial Points
- Generation of an initial point :(11b)–(11e), (11g), (17c), (20), (19), (23), (25).
- Generation of an initial point :(11f)–(11g), (32), (33), (35), (39), (40).
- Generation of an initial point :(47a)–(47g), (48), (51), (53), (55).
| Algorithm 1 Proposed algorithm to solve the problem (11) |
Initialization:
|
3.5. Overall Algorithm
4. Numerical Results
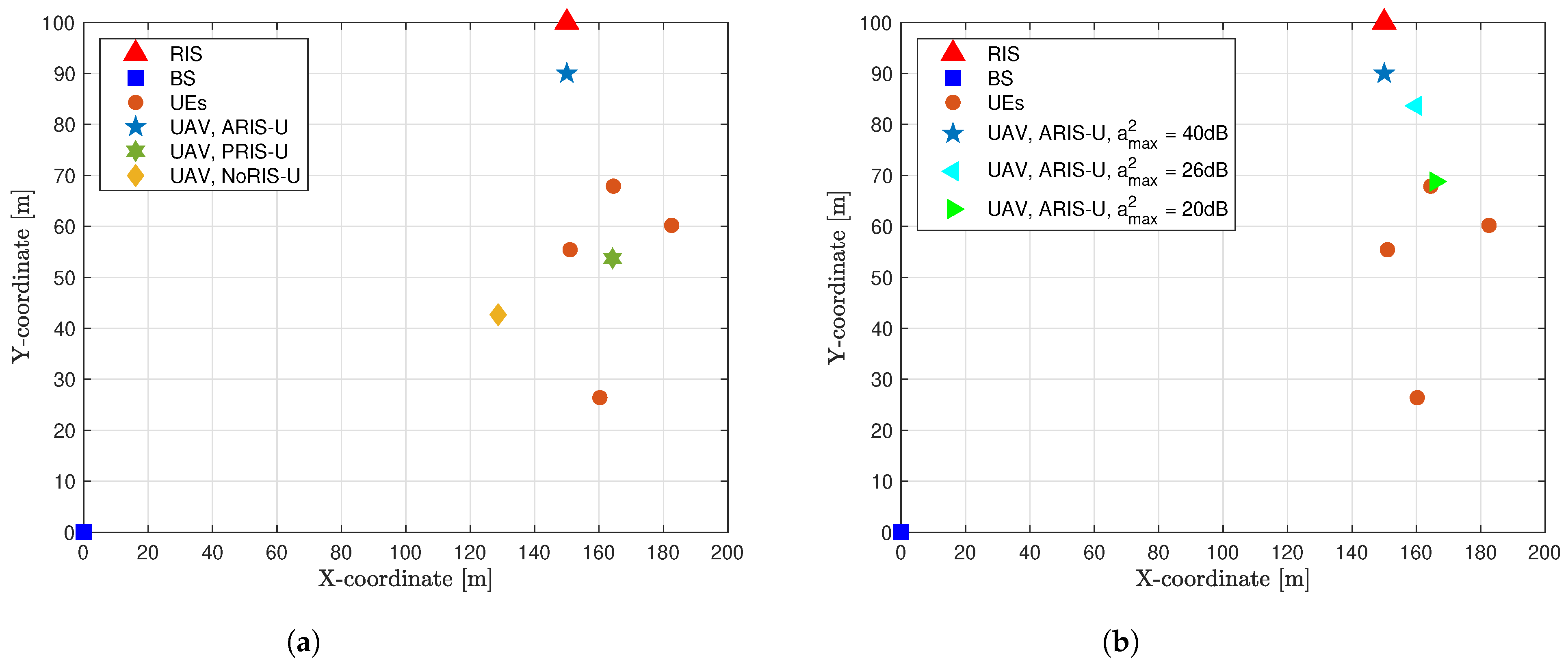
4.1. Simulation Setup
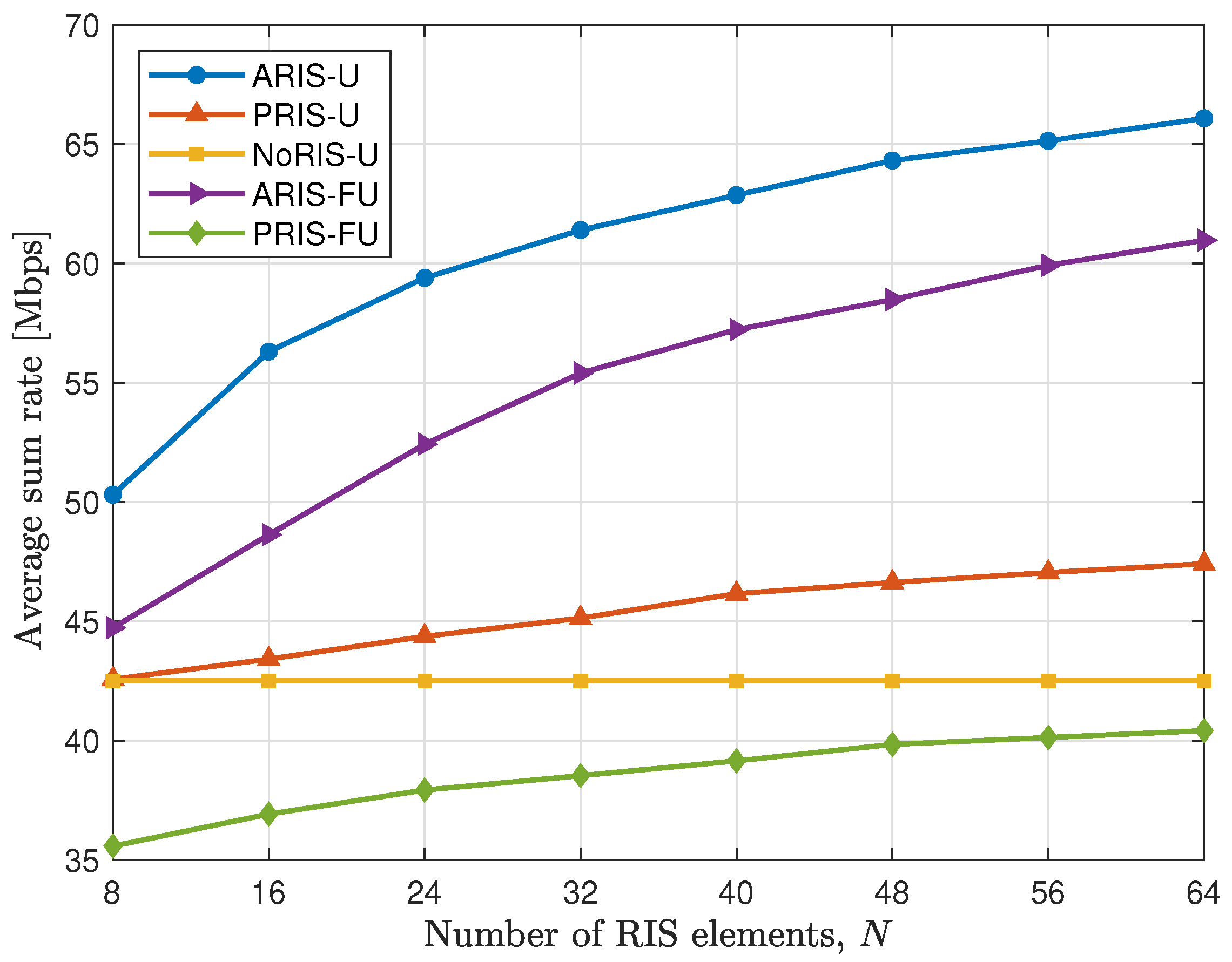
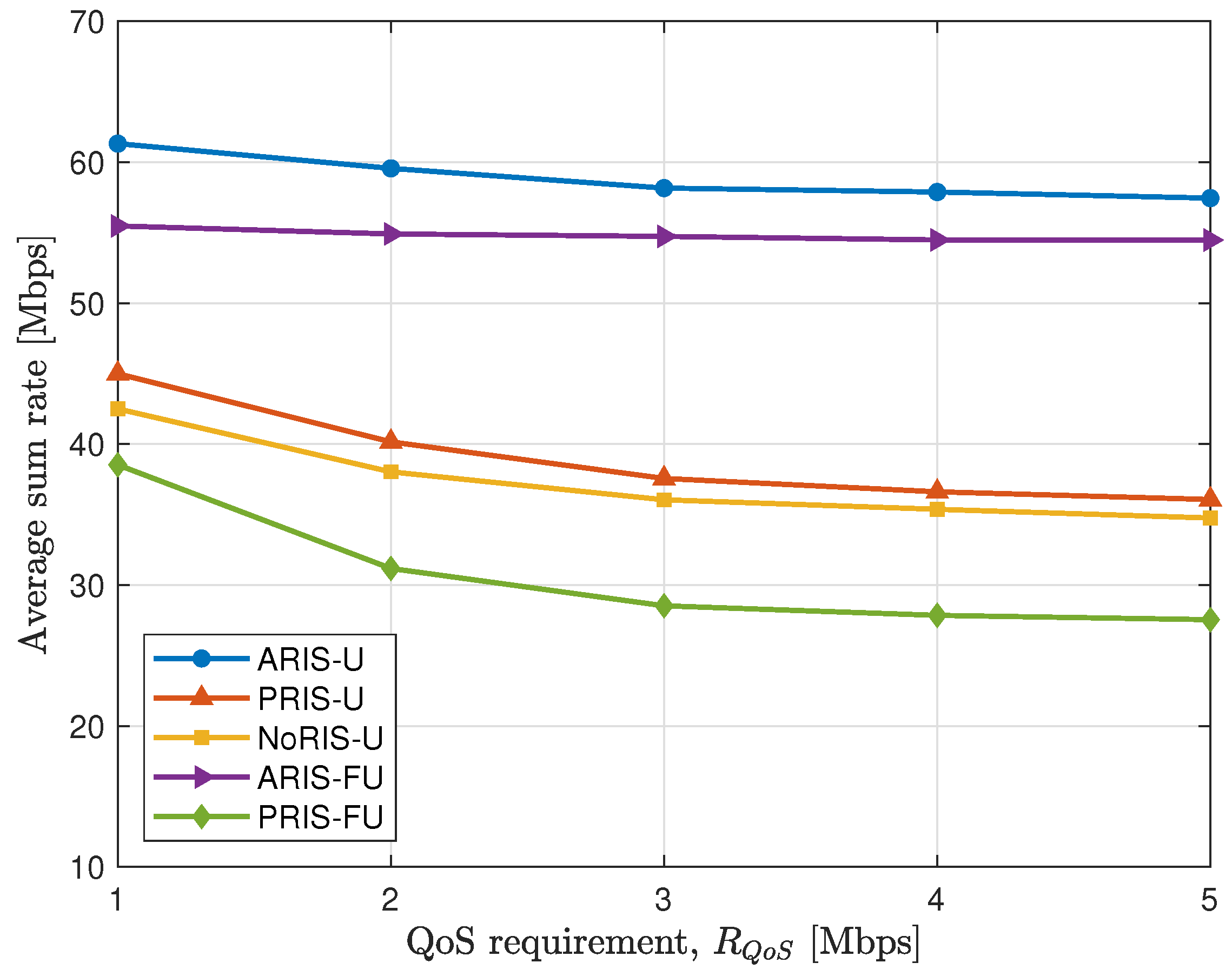
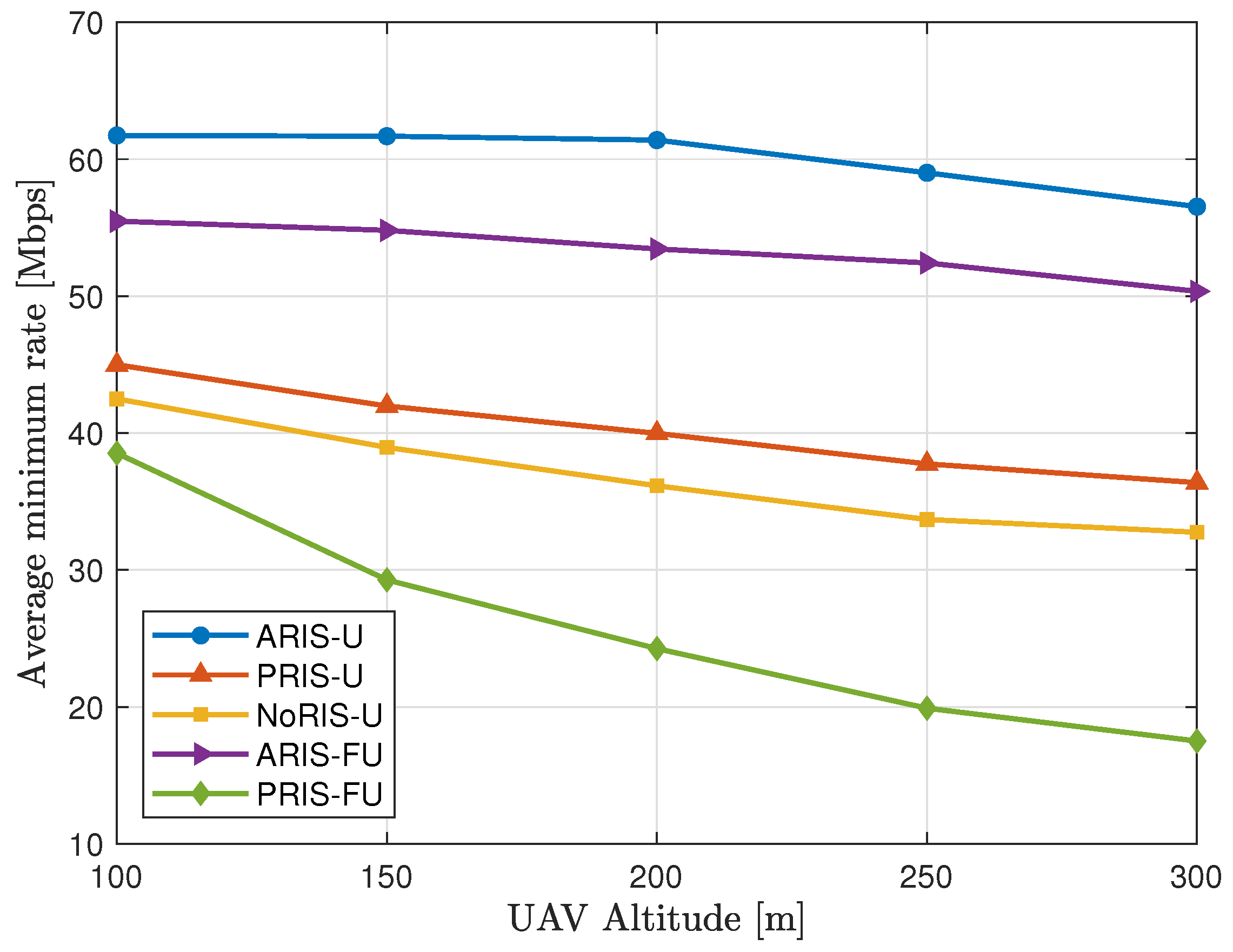
- PRIS-U: In this scheme, all elements of the RIS are set to be passive. The resource allocation, PRIS reflection coefficients, and UAV placement are jointly optimized.
- NoRIS-U: This framework optimizes resource allocation and UAV placement while omitting the RIS from the overall system.
- ARIS-FU: In this scheme, only resource allocation and ARIS reflection coefficients are jointly optimized, while the UAV placement is kept fixed.
- PRIS-FU: This scheme optimizes resource allocation and the RIS reflection coefficients, with the RIS configured as passive and the UAV placement fixed.
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef]
- Yan, C.; Fu, L.; Zhang, J.; Wang, J. A comprehensive survey on UAV communication channel modeling. IEEE Access 2019, 7, 107769–107792. [Google Scholar]
- Zeng, Y.; Wu, Q.; Zhang, R. Accessing from the sky: A tutorial on UAV communications for 5G and beyond. Proc. IEEE 2019, 107, 2327–2375. [Google Scholar] [CrossRef]
- Mohd Noor, N.; Abdullah, A.; Hashim, M. Remote sensing UAV/drones and its applications for urban areas: A review. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012003. [Google Scholar] [CrossRef]
- Gong, S.; Lu, X.; Hoang, D.T.; Niyato, D.; Shu, L.; Kim, D.I.; Liang, Y.C. Toward smart wireless communications via intelligent reflecting surfaces: A contemporary survey. IEEE Commun. Surv. Tutor. 2020, 22, 2283–2314. [Google Scholar] [CrossRef]
- Vu, B.M.; Shin, O.S. Optimization of IRS-assisted OFDMA SWIPT systems with dynamic subcarrier allocation and AC computing. In Proceedings of the 14th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 11–13 October 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 613–615. [Google Scholar]
- Dang, X.T.; Nguyen, H.V.; Shin, O.S. Physical layer security for IRS-UAV-assisted cell-free massive MIMO systems. IEEE Access 2024, 12, 89520–89537. [Google Scholar] [CrossRef]
- Zhang, Z.; Dai, L.; Chen, X.; Liu, C.; Yang, F.; Schober, R.; Poor, H.V. Active RIS vs. passive RIS: Which will prevail in 6G? IEEE Trans. Commun. 2022, 71, 1707–1725. [Google Scholar] [CrossRef]
- Ahmed, M.; Wahid, A.; Laique, S.S.; Khan, W.U.; Ihsan, A.; Xu, F.; Chatzinotas, S.; Han, Z. A survey on STAR-RIS: Use cases, recent advances, and future research challenges. IEEE Internet Things J. 2023, 10, 14689–14711. [Google Scholar] [CrossRef]
- Lyu, J.; Zhang, R. Hybrid active/passive wireless network aided by intelligent reflecting surface: System modeling and performance analysis. IEEE Trans. Wirel. Commun. 2021, 20, 7196–7212. [Google Scholar] [CrossRef]
- Ge, Y.; Fan, J.; Li, G.Y.; Wang, L.C. Intelligent reflecting surface-enhanced UAV communications: Advances, challenges, and prospects. IEEE Wirel. Commun. 2023, 30, 119–126. [Google Scholar] [CrossRef]
- Park, K.W.; Kim, H.M.; Shin, O.S. A survey on intelligent-reflecting-surface-assisted UAV communications. Energies 2022, 15, 5143. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, J.; Zhang, R. Energy minimization for wireless communication with rotary-wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Common throughput maximization in UAV-enabled OFDMA systems with delay consideration. IEEE Trans. Commun. 2018, 66, 6614–6627. [Google Scholar] [CrossRef]
- Zeng, H.; Zhu, X.; Jiang, Y.; Wei, Z.; Sun, S.; Xiong, X. Toward UL-DL rate balancing: Joint resource allocation and hybrid-mode multiple access for UAV-BS-assisted communication systems. IEEE Trans. Commun. 2022, 70, 2757–2771. [Google Scholar] [CrossRef]
- Hua, M.; Yang, L.; Wu, Q.; Swindlehurst, A.L. 3D UAV trajectory and communication design for simultaneous uplink and downlink transmission. IEEE Trans. Commun. 2020, 68, 5908–5923. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, J.; Xing, C.; Xie, S.; Luo, X. Self-organization of UAV networks for maximizing minimum throughput of ground users. IEEE Trans. Veh. Technol. 2024, 73, 11743–11755. [Google Scholar] [CrossRef]
- Nguyen, M.D.; Le, L.B.; Girard, A. Integrated UAV trajectory control and resource allocation for UAV-based wireless networks with co-channel interference management. IEEE Internet Things J. 2021, 9, 12754–12769. [Google Scholar] [CrossRef]
- Fu, S.; Feng, X.; Sultana, A.; Zhao, L. Joint power allocation and 3D deployment for UAV-BSs: A game theory based deep reinforcement learning approach. IEEE Trans. Wirel. Commun. 2023, 23, 736–748. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Lee, J. Sparse code with minimum hamming distance of three for spin-torque transfer magnetic random access memory. IEEE Access 2023, 11, 114071–114079. [Google Scholar] [CrossRef]
- Panigrahi, C.R.; Sarkar, J.L.; Pati, B.; Buyya, R.; Mohapatra, P.; Majumder, A. Mobile cloud computing and wireless sensor networks: A review, integration architecture, and future directions. IET Netw. 2021, 10, 141–161. [Google Scholar] [CrossRef]
- Tipper, D.; Babay, A.; Palanisamy, B.; Krishnamurthy, P. Network connectivity resilience in next generation backhaul networks: Challenges and future opportunities. IEEE Trans. Netw. Serv. Manag. 2024, 21, 5321–5334. [Google Scholar] [CrossRef]
- Mohajer, A.; Sorouri, F.; Mirzaei, A.; Ziaeddini, A.; Rad, K.J.; Bavaghar, M. Energy-aware hierarchical resource management and backhaul traffic optimization in heterogeneous cellular networks. IEEE Syst. J. 2022, 16, 5188–5199. [Google Scholar] [CrossRef]
- Huang, Y.; Cui, M.; Zhang, G.; Chen, W. Bandwidth, power, and trajectory optimization for UAV base station networks with backhaul and user QoS constraints. IEEE Access 2020, 8, 67625–67634. [Google Scholar] [CrossRef]
- Youssef, M.J.; Farah, J.; Nour, C.A.; Douillard, C. Full-duplex and backhaul-constrained UAV-enabled networks using NOMA. IEEE Trans. Veh. Technol. 2020, 69, 9667–9681. [Google Scholar] [CrossRef]
- Diaz-Vilor, C.; Lozano, A.; Jafarkhani, H. Cell-free UAV networks with wireless fronthaul: Analysis and optimization. IEEE Trans. Wirel. Commun. 2023, 23, 2054–2069. [Google Scholar] [CrossRef]
- Tafintsev, N.; Moltchanov, D.; Chiumento, A.; Valkama, M.; Andreev, S. Airborne integrated access and backhaul systems: Learning-aided modeling and optimization. IEEE Trans. Veh. Technol. 2023, 72, 16553–16566. [Google Scholar] [CrossRef]
- Youssef, M.J.; Nour, C.A.; Farah, J.; Douillard, C. Backhaul-constrained resource allocation and 3D placement for UAV-enabled networks. In Proceedings of the IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Yin, S.; Li, L.; Yu, F.R. Resource allocation and basestation placement in downlink cellular networks assisted by multiple wireless powered UAVs. IEEE Trans. Veh. Technol. 2019, 69, 2171–2184. [Google Scholar] [CrossRef]
- Wei, Z.; Cai, Y.; Sun, Z.; Ng, D.W.K.; Yuan, J.; Zhou, M.; Sun, L. Sum-rate maximization for IRS-assisted UAV OFDMA communication systems. IEEE Trans. Wirel. Commun. 2020, 20, 2530–2550. [Google Scholar] [CrossRef]
- Xie, W.; Li, Y.; Yu, C.; Wang, J.; Peng, X.; Zhu, P. Sum rate maximization for self-sustainable IRS-assisted UAV communications. IEEE Commun. Lett. 2022, 27, 640–644. [Google Scholar] [CrossRef]
- Peng, Z.; Liu, R.; Pan, C.; Zhang, Z.; Wang, J. Energy minimization for active RIS-aided UAV-enabled SWIPT systems. IEEE Commun. Lett. 2024, 28, 1372–1376. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Nguyen, V.D.; Van Nguyen, H.; Wu, Q.; Tölli, A.; Chatzinotas, S.; Juntti, M. Fairness enhancement of UAV systems with hybrid active-passive RIS. IEEE Trans. Wirel. Commun. 2023, 23, 4379–4396. [Google Scholar] [CrossRef]
- Diamanti, M.; Charatsaris, P.; Tsiropoulou, E.E.; Papavassiliou, S. The prospect of reconfigurable intelligent surfaces in integrated access and backhaul networks. IEEE Trans. Green Commun. Netw. 2021, 6, 859–872. [Google Scholar] [CrossRef]
- Nguyen, M.D.; Le, L.B.; Girard, A. UAV placement and resource allocation for intelligent reflecting surface assisted UAV-based wireless networks. IEEE Commun. Lett. 2022, 26, 1106–1110. [Google Scholar] [CrossRef]
- Vu, B.M.; Dang, T.N.; Shin, O.S. Rate fairness optimization for mixed FSO/RF IRS-assisted UAV communication systems. In Proceedings of the 2023 RIVF International Conference on Computing and Communication Technologies (RIVF), Hanoi, Vietnam, 23–25 December 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 200–205. [Google Scholar]
- Nguyen, T.T.; Pham, Q.V.; Nguyen, V.D.; Lee, J.H.; Kim, Y.H. Resource allocation for energy efficiency in OFDMA-enabled WPCN. IEEE Wirel. Commun. Lett. 2020, 9, 2049–2053. [Google Scholar] [CrossRef]
- Yang, F.; Xu, W.; Zhang, Z.; Guo, L.; Lin, J. Energy efficiency maximization for relay-assisted WPCN: Joint time duration and power allocation. IEEE Access 2018, 6, 78297–78307. [Google Scholar] [CrossRef]
- Huang, D.; Cui, M.; Zhang, G.; Chu, X.; Lin, F. Trajectory optimization and resource allocation for UAV base stations under in-band backhaul constraint. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 83. [Google Scholar] [CrossRef]
- Li, J.; Xu, S.; Liu, J.; Cao, Y.; Gao, W. Reconfigurable intelligent surface enhanced secure aerial-ground communication. IEEE Trans. Commun. 2021, 69, 6185–6197. [Google Scholar] [CrossRef]
- Peng, Q.; Wu, Q.; Chen, G.; Liu, R.; Ma, S.; Chen, W. Hybrid active-passive IRS assisted energy-efficient wireless communication. IEEE Commun. Lett. 2023, 27, 2202–2206. [Google Scholar] [CrossRef]
- Khoshafa, M.H.; Ngatched, T.M.; Ahmed, M.H.; Ndjiongue, A.R. Active reconfigurable intelligent surfaces-aided wireless communication system. IEEE Commun. Lett. 2021, 25, 3699–3703. [Google Scholar] [CrossRef]
- Nguyen, K.G.; Vu, Q.D.; Tran, L.N.; Juntti, M. Energy efficiency fairness for multi-pair wireless-powered relaying systems. IEEE J. Sel. Areas Commun. 2018, 37, 357–373. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Nguyen, V.D.; da Costa, D.B.; An, B. Hybrid user pairing for spectral and energy efficiencies in multiuser MISO-NOMA networks with SWIPT. IEEE Trans. Commun. 2020, 68, 4874–4890. [Google Scholar] [CrossRef]
- Marks, B.R.; Wright, G.P. A general inner approximation algorithm for nonconvex mathematical programs. Oper. Res. 1978, 26, 681–683. [Google Scholar] [CrossRef]
- Do, T.N.; Nguyen, V.D.; Shin, O.S.; An, B. Simultaneous uplink and downlink transmissions for wireless powered communication networks. IEEE Commun. Lett. 2018, 23, 374–377. [Google Scholar] [CrossRef]
- Dang, X.T.; Shin, O.S. Optimization of energy efficiency for federated learning over unmanned aerial vehicle communication networks. Electronics 2024, 13, 1827. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Vu, Q.D.; Lee, K.; Juntti, M. Hybrid relay-reflecting intelligent surface-assisted wireless communications. IEEE Trans. Veh. Technol. 2022, 71, 6228–6244. [Google Scholar] [CrossRef]
- Nguyen-Kha, H.; Nguyen, H.V.; Le, M.T.; Shin, O.S. Joint UAV placement and IRS phase shift optimization in downlink networks. IEEE Access 2022, 10, 111221–111231. [Google Scholar] [CrossRef]
- Nguyen, M.D.; Ho, T.M.; Le, L.B.; Girard, A. UAV placement and bandwidth allocation for UAV based wireless networks. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-Problem | Complexity | ||
|---|---|---|---|
| (29) | |||
| (42) | |||
| (56) | |||
| Total Complexity | |||
| Parameter | Description | Value |
|---|---|---|
| BS location | [0, 0, 0] m | |
| RIS location | [50, 100, 50] m | |
| UAV altitude | 100 m [33] | |
| Path loss | −30 dB [33,49] | |
| , , | Path loss exponents | 3.2, 2.0, 2.2 [33] |
| Rician factor | 10 [33,49] | |
| B | System bandwidth | 10 MHz [50] |
| UAV power budget | 1 W [50] | |
| BS power budget | 36 dBm [50] | |
| AWGN Noise | −90 dBm [33,49] | |
| The power budget of RIS | 20 dBm [42] | |
| The maximum gain achievable by an active load | 20 dB [42] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran, T.-T.-M.; Vu, B.-M.; Shin, O.-S. Optimization of Bandwidth Allocation and UAV Placement in Active RIS-Assisted UAV Communication Networks with Wireless Backhaul. Drones 2025, 9, 111. https://doi.org/10.3390/drones9020111
Tran T-T-M, Vu B-M, Shin O-S. Optimization of Bandwidth Allocation and UAV Placement in Active RIS-Assisted UAV Communication Networks with Wireless Backhaul. Drones. 2025; 9(2):111. https://doi.org/10.3390/drones9020111
Chicago/Turabian StyleTran, Thi-Thuy-Minh, Binh-Minh Vu, and Oh-Soon Shin. 2025. "Optimization of Bandwidth Allocation and UAV Placement in Active RIS-Assisted UAV Communication Networks with Wireless Backhaul" Drones 9, no. 2: 111. https://doi.org/10.3390/drones9020111
APA StyleTran, T.-T.-M., Vu, B.-M., & Shin, O.-S. (2025). Optimization of Bandwidth Allocation and UAV Placement in Active RIS-Assisted UAV Communication Networks with Wireless Backhaul. Drones, 9(2), 111. https://doi.org/10.3390/drones9020111