



UAV Path Planning Trends from 2000 to 2024: A Bibliometric Analysis and Visualization


Abstract
:1. Introduction
- We examine the progression of UAV path planning from multiple perspectives and delineate four distinct stages in its evolution.
- We offer a comprehensive analysis of advancements in UAV path planning through a bibliometric perspective. This analysis highlights the key contributors in this field, including academic journals, research institutions, and geographical regions, while also outlining the relevant academic disciplines involved.
- We examine the research hotspots and trends in the field of UAV path planning from 2001 to 2024, while also highlighting recent research findings in application scenarios since 2022.
2. Evolution, Methods, and Models for UAV Path Planning
2.1. Stages of UAV Path Planning Development
- Early Exploratory Stage
- Classical Algorithm Stage
- Intelligent Algorithm Application Stage
- Multi-Intelligence Collaborative Stage
2.2. Basic Model
- Equation (1) represents the UAV steering angle constraint, where denotes the maximum steering angle of the UAV. If the steering angle is excessively large, the UAV may lose control or incur damage. It is crucial to ensure that the steering error does not exceed the mechanical and control system’s limitations.
- Equation (2) represents the UAV climbing angle constraint, where denotes the maximum climbing angle. This constraint limits the vertical climb or descent to prevent loss of control due to excessively steep flight paths.
- Equation (3) represents the UAV turning radius constraint, where denotes the minimum turning radius and represents the minimum flight speed. These constraints prevent the UAV from losing control due to excessively small turning radii.
- Equations (4) and (5) represent the flight altitude and endurance constraints, respectively. and denote the maximum and minimum flight altitudes within the flight environment. denotes the total flight time for the UAV to reach its current position, and represents the maximum endurance time.
- Equation (6) represents the energy cost, which incorporates the minimum power , altitude , maximum power , and speed v, reflecting variations in the UAV’s energy consumption under different flight conditions.
- Equation (7) represents the total communication cost, which depends on the number of communication links between the UAV and the control station, as well as the communication time. The value of is correlated with the distance between the UAV and the control station. Equation (8) represents the range length cost, which is calculated based on the total length of the UAV’s flight path.
- Equation (9) represents the threat cost, which depends on the distance between the UAV and the threat.
- Equations (10) and (11) represent the altitude cost and smoothing cost, respectively, both of which are related to the UAV’s energy consumption and flight stability. Equation (12) represents the total cost of the flight, providing a comprehensive metric to assess both the efficiency and safety of the UAV’s flight path.
3. Study Design
3.1. Data Sources
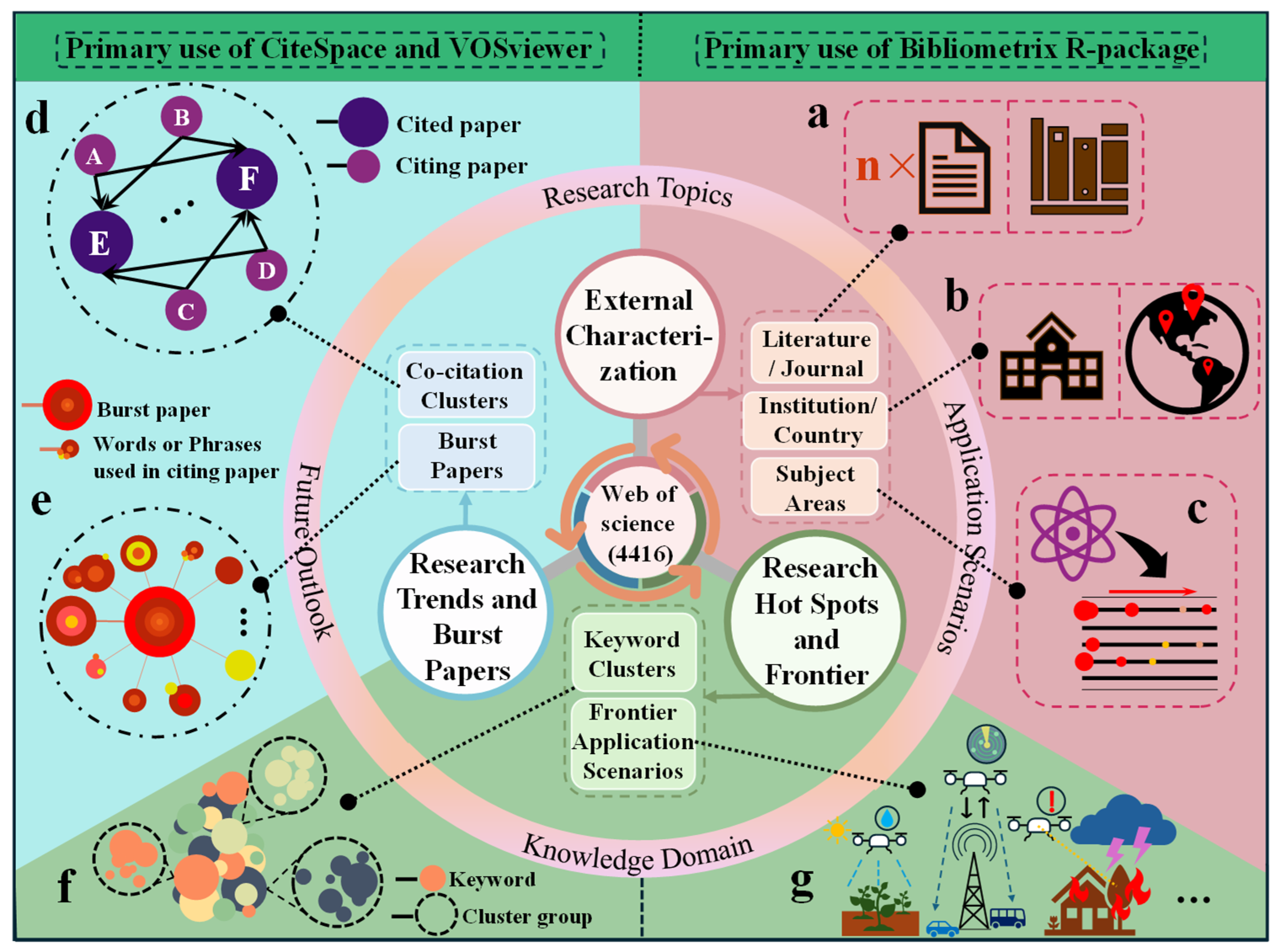
3.2. Visualization Tools
3.3. Methodology
4. External Characterization
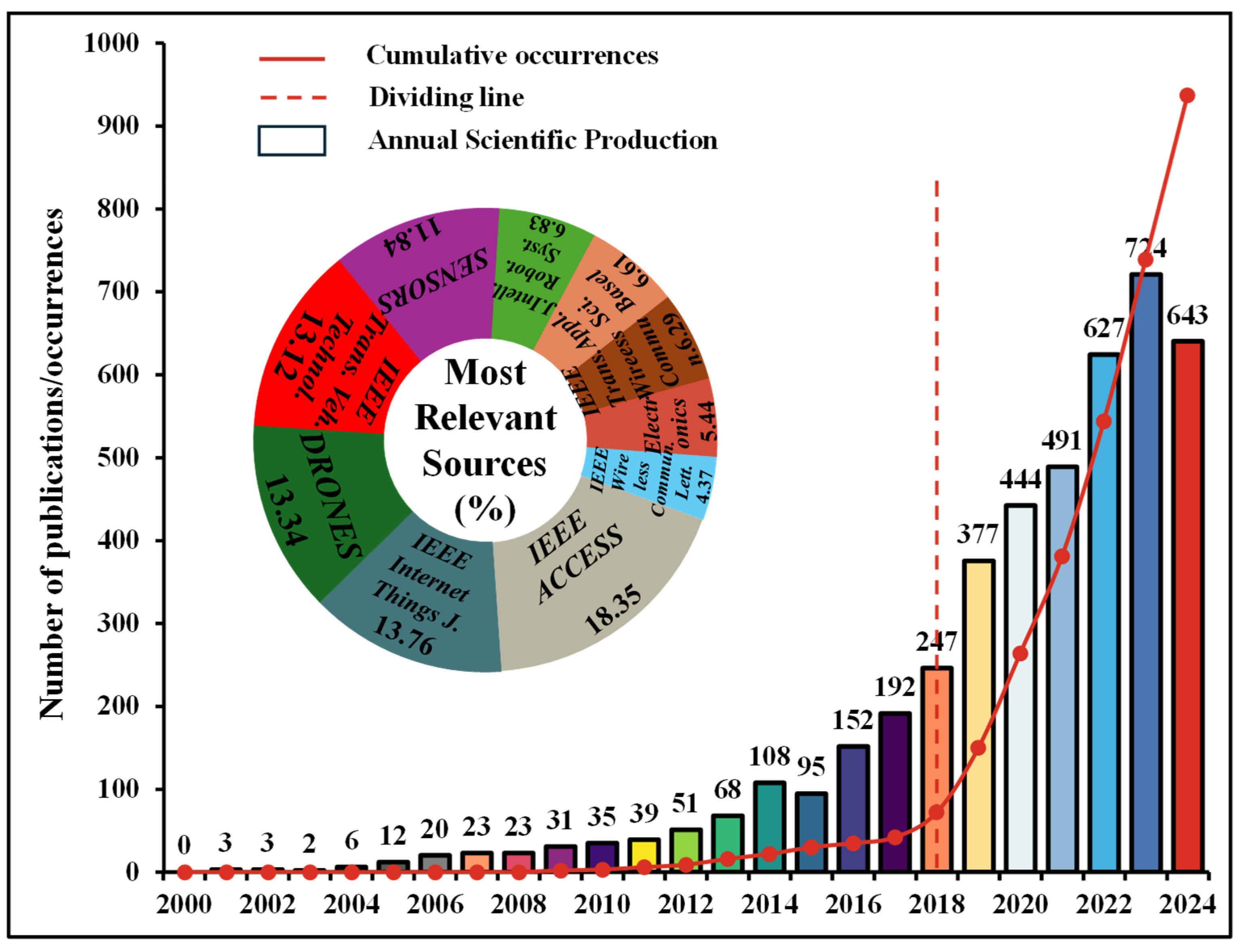
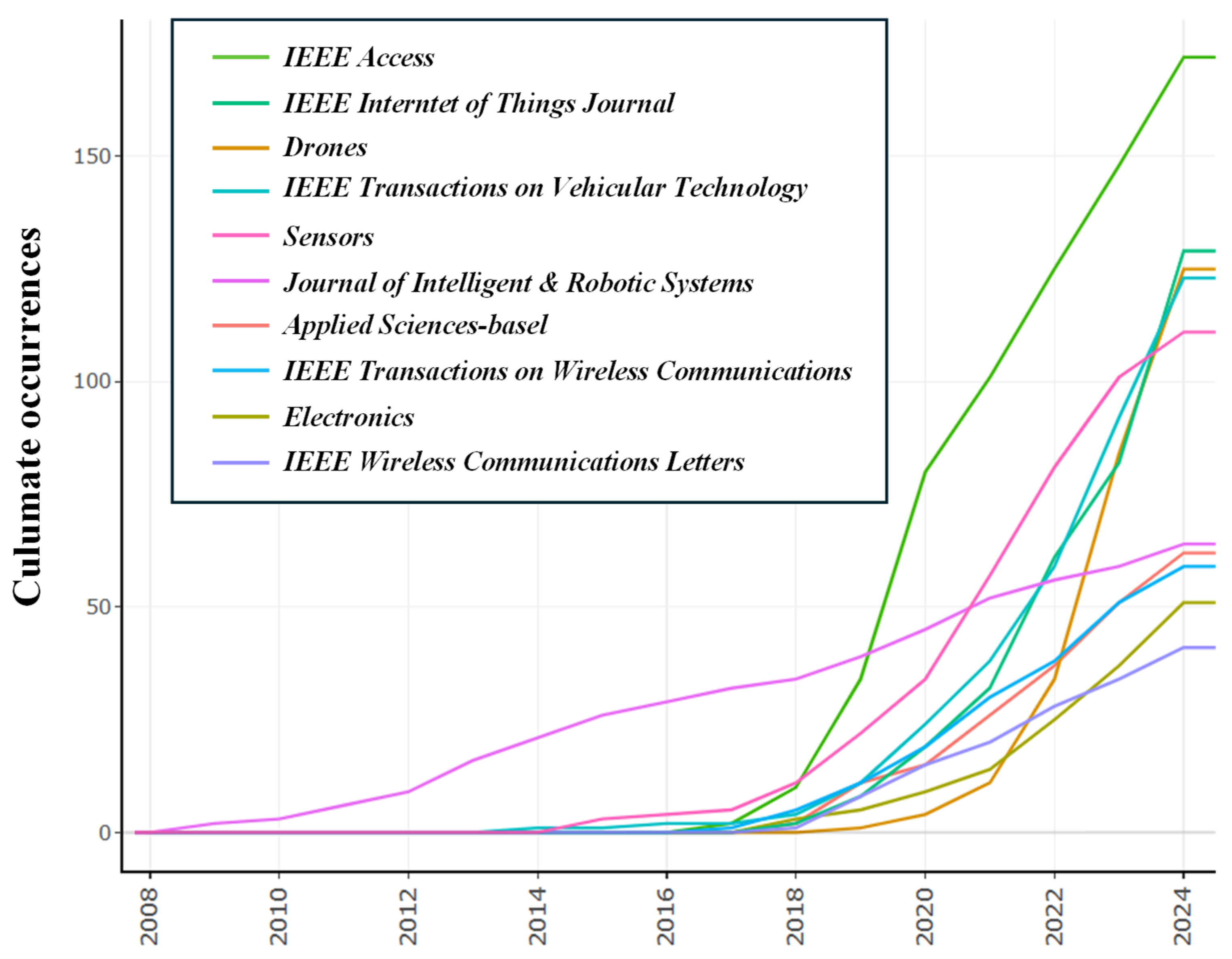
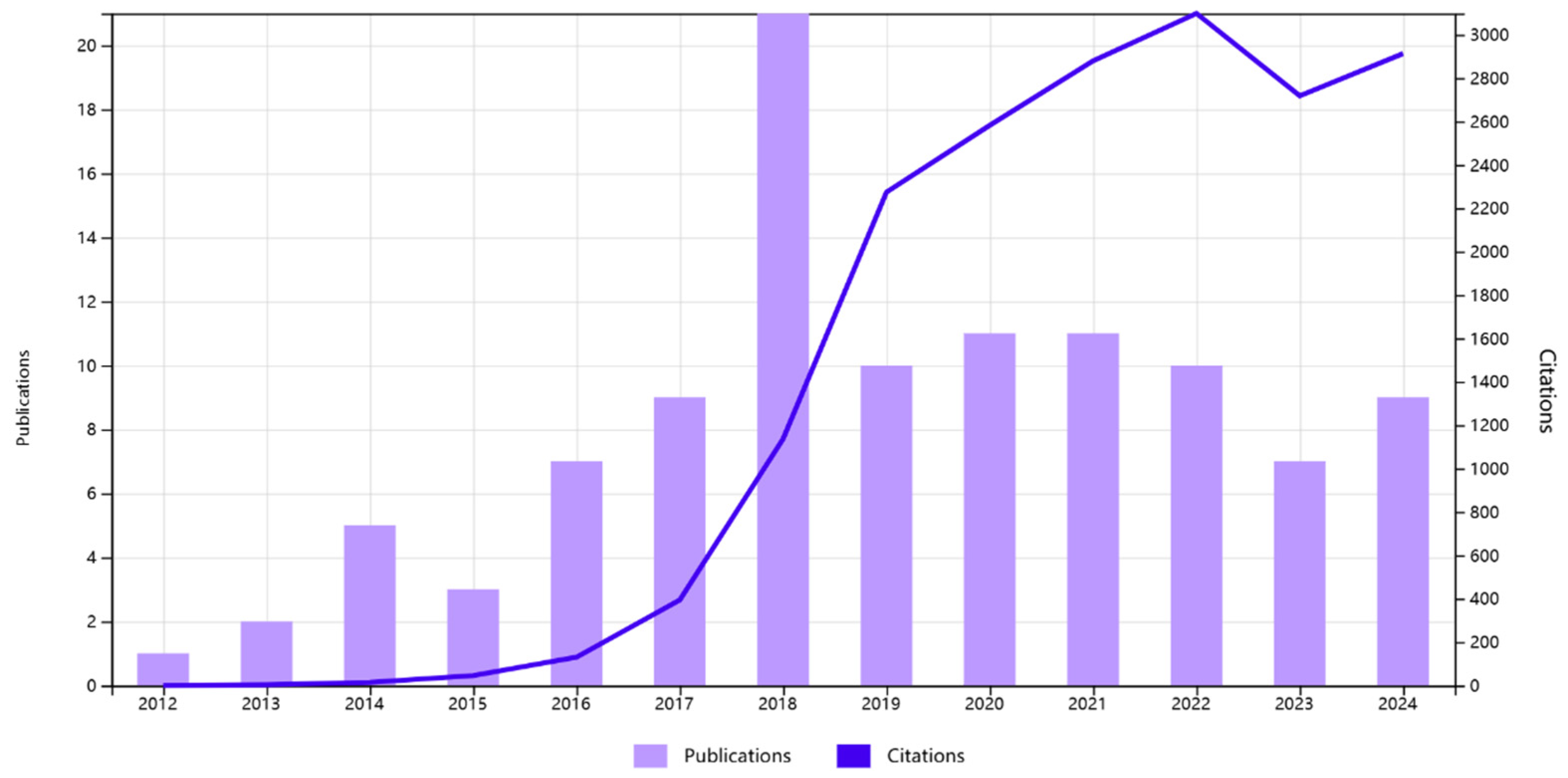
4.1. Number and Sources of Publications
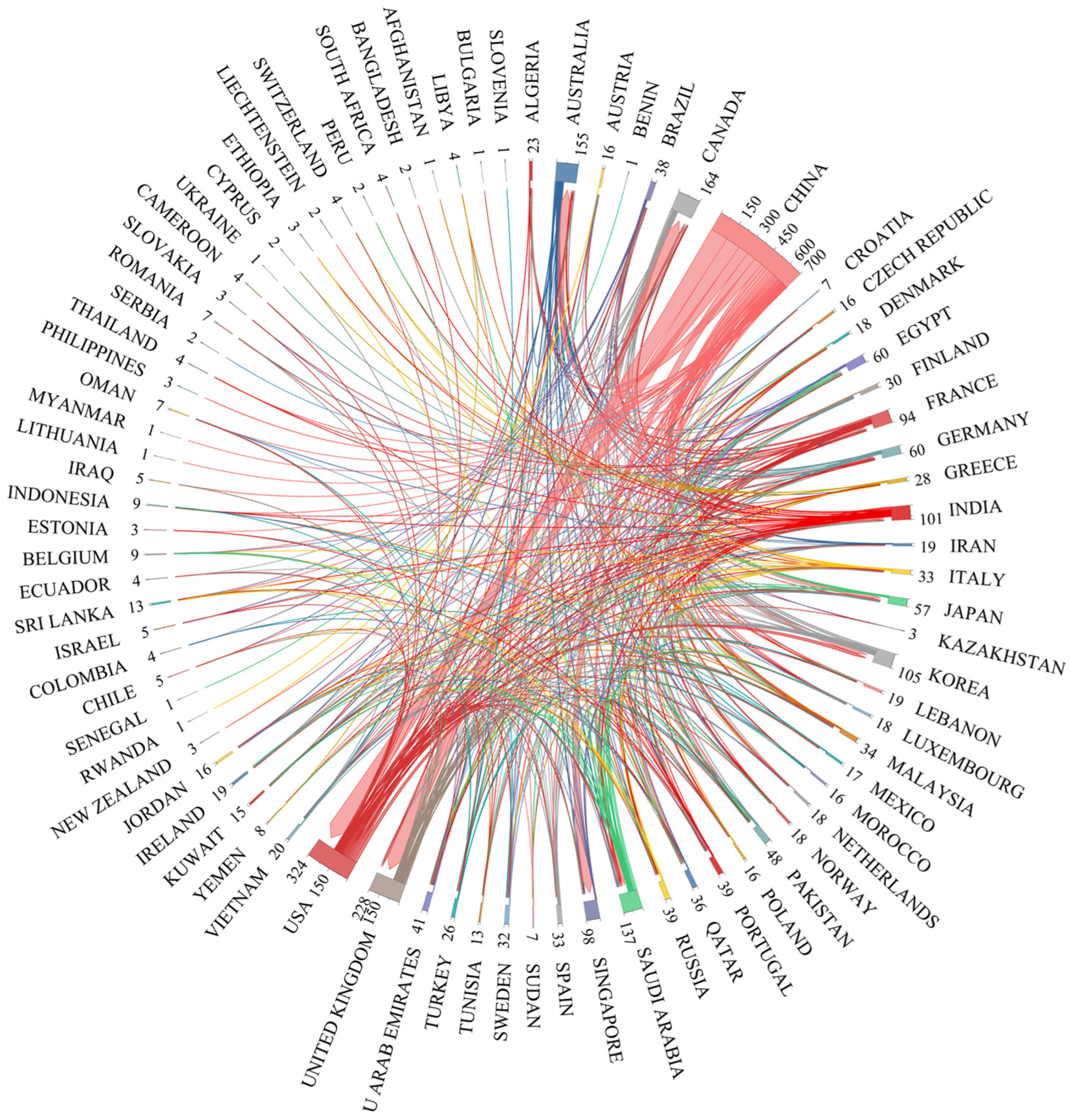
4.2. Institution and Country/Region Statistics
4.3. Subject Areas Statistics
- Engineering (2590; 0.62);
- Computer Science (1733; 0.38);
- Telecommunications (1285; 0.09);
- Automation & Control Systems (789; 0.34);
- Robotics (445; 0.11);
- Remote Sensing (277; 0.17);
- Transportation (235; 0.32);
- Instruments & Instrumentation (206; 0.17);
- Chemistry (173; 0.05);
- Operations Research & Management Science (143; 0.06).

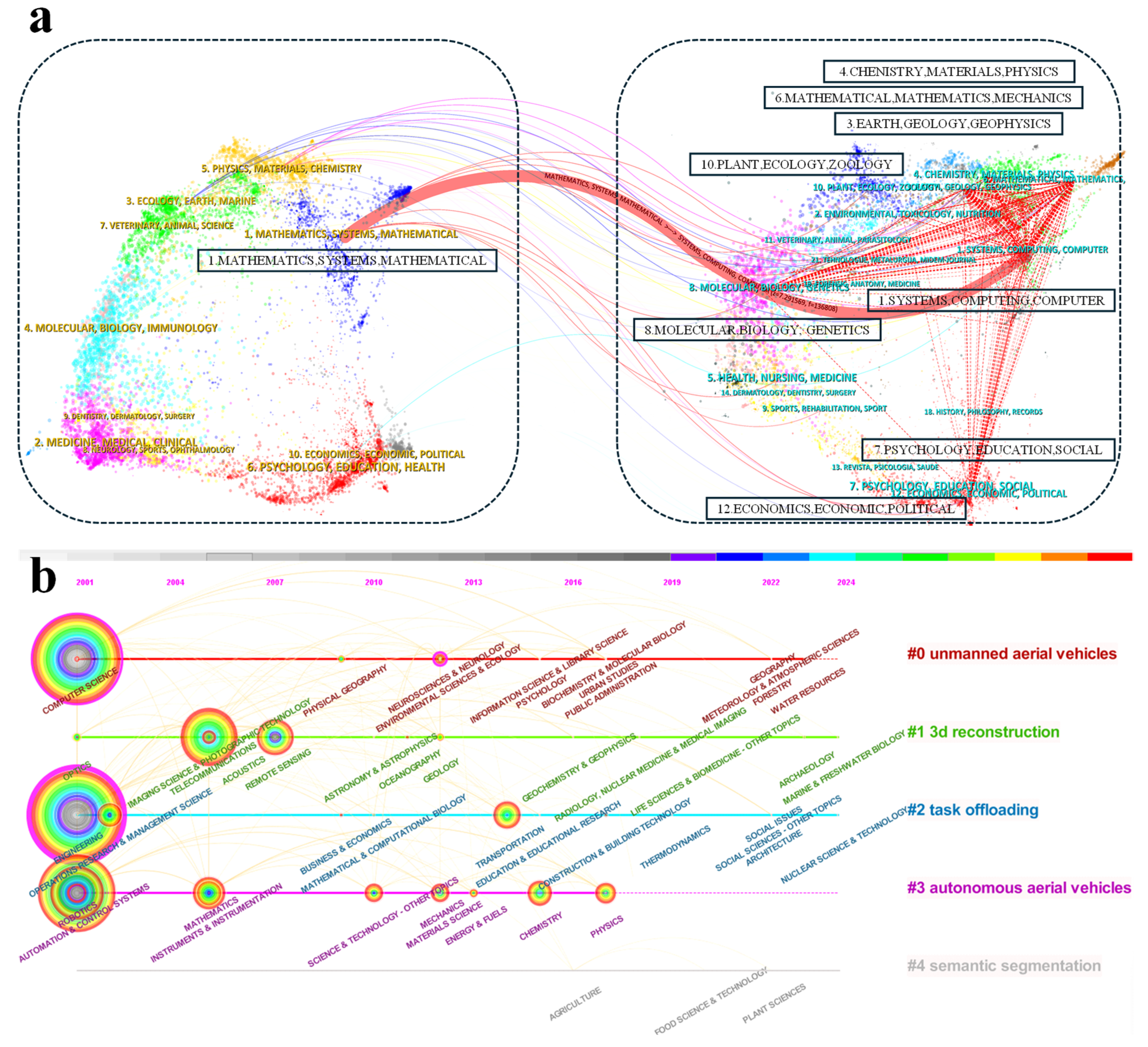
- Subject areas distribution pattern: As shown in Figure 9a, the literature from the fields of Systems, Computing, and Computer Science is notably influenced by literature from the fields of Mathematics, Systems, and Mathematical Sciences (z = 7.29, f = 136,808). This strong citation relationship highlights that Mathematics and Systems form the foundational basis of the UAV path planning field, which is more maturely developed. In contrast, Systems, Computing, and Computer Science are the current focal areas of UAV path planning research. These areas include advanced topics such as reinforcement learning, deep learning, control systems, computer vision & image processing, and networking & communication, along with applications in simulation & virtual reality.
- Node association pattern: As observed on the right-hand side of the citing journal, the fields of Earth, Geology, Geophysics, Chemistry, Materials, Physics, Mathematics, Mechanics, Psychology, Education, Social Sciences, Molecular Biology & Genetics, and Plant Ecology, Zoology, as well as Economics, Political Science, are closely interconnected. This indicates that the UAV path planning research field has extensive coverage, spanning multiple areas and applications.
5. Research Trends and Burst Papers
5.1. Co-Citation Clustering Analysis
- The first trend is “multi-objective cooperative control problems in cluttered natural environments”, which in chronological order are #9 target assignment (1; 58; 2002), #13 using multi-objective evolutionary algorithm (0.978; 29; 2005), #6 cluttered natural environment (0.972; 75; 2005).
- The second trend is “high-performance UAV obstacle avoidance technology”, including #8 rapid multi-query path planning (0.977; 70; 2009), #18 cooperative relay (0.998; 16; 2009), #16 3d space (0.993; 21; 2009), #2 linear programming (0.916; 234; 2012).
- The third trend is defined as “intelligent path planning and scene reconstruction in urban environments” and includes #11 messenger UAV (0.968; 42; 2014), #17 urban scene reconstruction (1; 17; 2015), #7 routing problem (0.913; 71; 2017), #10 autonomous drone racing (0.946; 54; 2018), #5 coverage path planning (0.939; 75; 2018), #0 path planning (0.835; 282; 2019) #19 unmanned aerial vehicle path-planning method (0.978; 16; 2021).
- The fourth trend is summarized as “efficient communication and trajectory optimization for UAV networks”, which includes five clusters that have emerged in the last decade: #1 communication design (0.857; 277; 2018), #3 data collection (0.854; 169; 2020), #4 task offloading (0.89; 115; 2020), #12 irs-assisted UAV network (0.956; 37; 2020), and #14 engineering design problem (0.985; 26; 2021).
5.2. Burst Papers Analysis
- “Wireless Communications with Unmanned Aerial Vehicles: Opportunities and Challenges” (2016) [199]
- “Throughput Maximization for UAV-Enabled Mobile Relaying Systems” (2016) [97]
- “Energy-Efficient UAV Communication with Trajectory Optimization” (2017) [98]
- “Joint Trajectory and Communication Design for Multi-UAV Enabled Wireless Networks” (2018) [99]
6. Research Hot Spots and Frontier
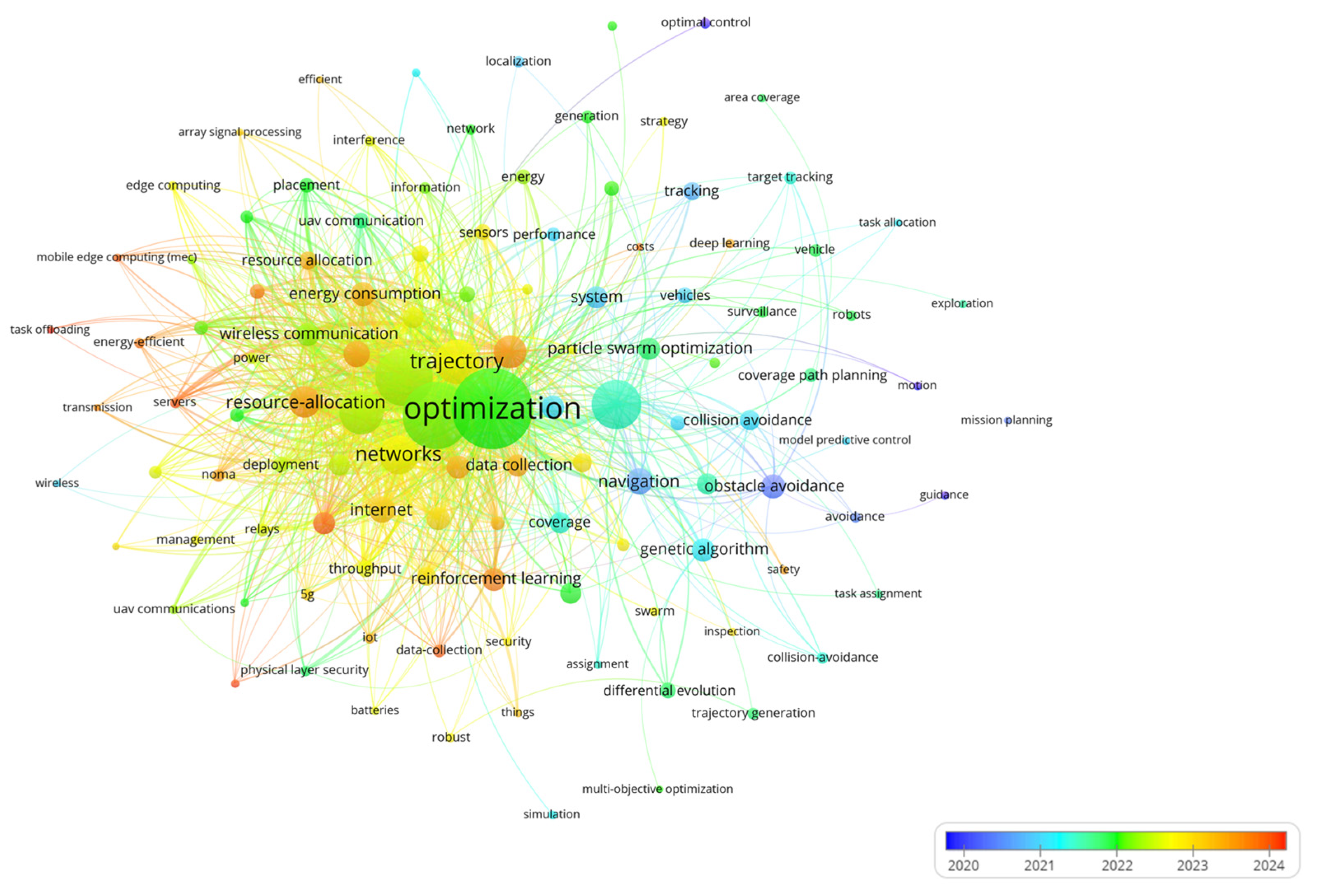
6.1. Keyword Clustering Analysis
- Trajectory Optimization;
- Optimization;
- Communication;
- Navigation;
- Design;
- Task Analysis.

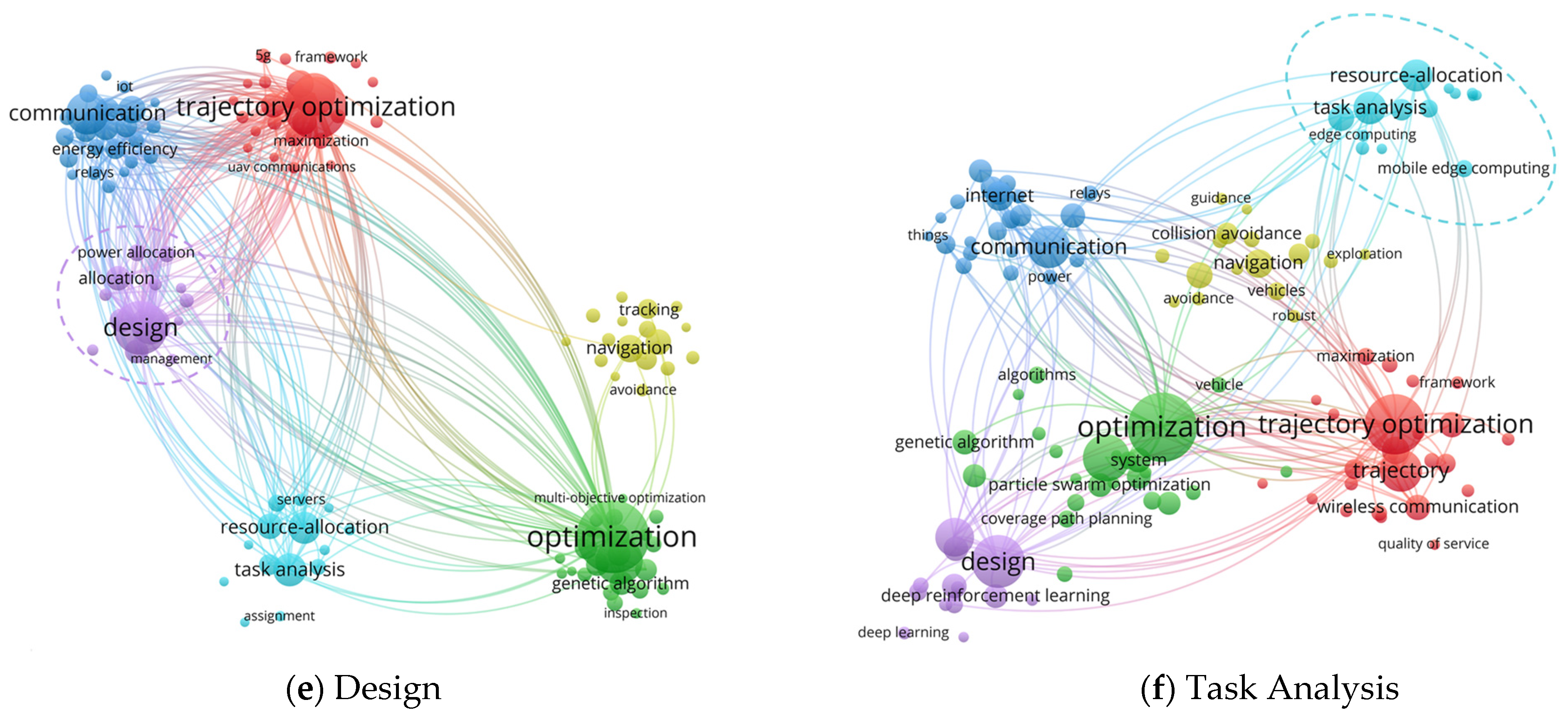
- Constraint: This category includes factors that directly influence UAV path planning and must be taken into account in optimization. Relevant keywords include energy consumption (123), capacity (65), altitude (57), flight (49), physical layer security (39), network (38), time (30), safety (30), batteries (30), costs (25).
- Theoretical approach: These are the algorithms, models, and optimization methods used in UAV path planning. Notable keywords include genetic algorithm (110), particle swarm optimization (103), model (99), heuristic algorithms (86), differential evolution (65), traveling salesman problem (62), maximization (57), minimization (52), NOMA (48), ant colony optimization (31), simulation (28).
- Application: This category includes the practical implementation of UAV path planning in real-world scenarios, such as communication, task scheduling, and resource management. Important keywords include resource management (133), systems (116), wireless communication (116), mobile edge computing (60), mobile computing (11), route planning (59), coverage path planning (57), vehicle (48), 5G (46), surveillance (45), reconfigurable intelligent surface (37), inspection (30), edge computing (30), assignment (28), task offloading (25), transmission (25).
6.2. Frontier Applications
- Engineering optimization in the context of UAVs focuses on enhancing the ability to perform various tasks, such as construction, bridge inspection, and transmission line monitoring. Path planning in these scenarios accounts for factors such as operational efficiency, flight safety, accuracy requirements, and the need for multi-task collaboration [214].
- Environmental monitoring primarily involves the collection of environmental data, particularly in areas such as climate change, air quality, pollution source tracking, and wildlife protection [215]. In this context, path planning accounts for factors like terrain, climate, and other variables to ensure comprehensive and accurate data collection.
- Rescue and emergency response operations heavily rely on efficient path planning, with UAVs deployed in hazardous environments to minimize casualties, improve rescue efforts, and support post-disaster recovery. Key applications include disaster area assessments, personnel search and rescue, and the evacuation of individuals from disaster zones [216].
- Wireless communications have become increasingly important with the rise of technologies such as the IoT and 5G. UAVs are widely employed to establish temporary communication networks, including communication relays, and data transmission [217]. Path planning enables UAVs to identify optimal flight paths for signal coverage, ensuring reliable communication in designated areas.
- Logistics delivery aims to enhance delivery efficiency, optimize flight routes, and minimize energy and time costs. Path planning in this domain considers factors such as geographic information, weather conditions, no-fly zones, and the need to ensure the safety and accuracy of deliveries, including courier services, medical deliveries, and emergency material distribution [218].
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BACOHBA | Bidirectional ant colony and discrete honey badger algorithm |
| HBAFOA | Honey badger-fruit fly algorithm |
| DETACH | Detect and Remove path intersections to avoid collisions and hazards |
| HGWODE | Hybrid GWO and differential evolution algorithm |
| BA | Bat algorithm |
| BOFBA | Bio-inspired optical flow balance algorithm |
| B&P | Branch-and-price |
| BLA | Bidirectional labeling algorithm |
| TS | Tabu search |
| LiDAR | Light detection and ranging |
| DPC | Dense point clouds |
| DLS | Dual-location sampling scheme |
| USS | Upward spiral sampling scheme |
| IUS | Inverted-U sampling scheme |
| AIS | Asynchronous isometric sampling scheme |
| SfM | Structure from motion algorithm |
| MVS | Multi-view stereo algorithm |
| SA | Simulated annealing algorithm |
| ABC | Artificial bee colony algorithm |
| DTU | Dynamic truck-UAV collaboration strategy |
| TSI | Tabu search-based integrated scheduling algorithm |
| RE | Recursion-based evaluation algorithm |
| RANSAC | Random sampling consistency algorithm |
| SURF | Speeded-up robust features algorithm |
| FTA | Fault tree analysis |
| BN | Bayesian network |
| SICq | Simultaneous inform and connect with QoS |
| RPA | Dynamic relay positioning algorithm |
| AGSP | Based particle swarm optimization |
| SCA | Successive convex approximation |
| BCD | Block coordinate descent |
| DMSPSO | Dynamic multi-swarm PSO algorithm |
| CLPSO | Comprehensive learning PSO algorithm |
| QiER | Quantum-inspired experience replay |
| COS | Cosine-based approximation |
| SAC | Soft actor-critic algorithm |
| HGSA | Hybrid genetic and simulated annealing |
| MC-SA | Monte Carlo simulation-based sensitivity analysis |
| DBSCAN | Density-based spatial clustering of applications with noise |
| VCG | Vickrey-clarke-groves mechanism |
| NLO | Nonlinear optimization |
| VPF-RRT* | Virtual potential field RRT* |
| DRNN-PI | Deep recurrent neural networks PI |
| APF-IRRT* | Artificial potential field -improved rapidly exploring random trees |
| ISOS | Improved symbiotic organisms search |
| SCPSO | Sine–cosine particle swarm optimization |
| PPO | Proximal policy optimization algorithm |
References
- Chan, Y.; Ng, K.K.; Lee, C.; Hsu, L.-T.; Keung, K. Wind dynamic and energy-efficiency path planning for unmanned aerial vehicles in the lower-level airspace and urban air mobility context. Sustain. Energy Technol. Assess. 2023, 57, 103202. [Google Scholar] [CrossRef]
- Deng, M.; Yang, Q.; Peng, Y. A real-time path planning method for urban low-altitude logistics UAVs. Sensors 2023, 23, 7472. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Zhang, H.; He, Q.; Bian, K.; Song, L. Joint trajectory and power optimization for UAV relay networks. IEEE Commun. Lett. 2017, 22, 161–164. [Google Scholar] [CrossRef]
- Li, J.; Kang, H.; Sun, G.; Liang, S.; Liu, Y.; Zhang, Y. Physical layer secure communications based on collaborative beamforming for UAV networks: A multi-objective optimization approach. In Proceedings of the IEEE INFOCOM 2021-IEEE Conference on Computer Communications, Vancouver, BC, Canada, 10–31 May 2021; pp. 1–10. [Google Scholar]
- Yang, S.; Yang, X.; Mo, J. The application of unmanned aircraft systems to plant protection in China. Precis. Agric. 2018, 19, 278–292. [Google Scholar] [CrossRef]
- Vashisth, A.; Batth, R.S.; Ward, R. Existing path planning techniques in unmanned aerial vehicles (UAVs): A systematic review. In Proceedings of the 2021 International Conference on Computational Intelligence and Knowledge Economy (ICCIKE), Dubai, United Arab Emirates, 17–18 March 2021; pp. 366–372. [Google Scholar]
- Shiller, Z. Off-line and on-line trajectory planning. In Motion and Operation Planning of Robotic Systems: Background and Practical Approaches; Springer Nature: Berlin, Germany, 2015; pp. 29–62. [Google Scholar]
- Debnath, D.; Vanegas, F.; Sandino, J.; Hawary, A.F.; Gonzalez, F. A Review of UAV Path-Planning Algorithms and Obstacle Avoidance Methods for Remote Sensing Applications. Remote Sens. 2024, 16, 4019. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Abdulsaheb, J.A.; Kadhim, D.J. Classical and heuristic approaches for mobile robot path planning: A survey. Robotics 2023, 12, 93. [Google Scholar] [CrossRef]
- Yu, Z.; Sun, F.; Lu, X.; Song, Y. Overview of research on 3d path planning methods for rotor uav. In Proceedings of the 2021 International Conference on Electronics, Circuits and Information Engineering (ECIE), Zhengzhou, China, 22–24 January 2021; pp. 368–371. [Google Scholar]
- Yang, L.; Qi, J.; Xiao, J.; Yong, X. A literature review of UAV 3D path planning. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 2376–2381. [Google Scholar]
- Chen, W.; Liu, J.; Guo, H.; Kato, N. Toward robust and intelligent drone swarm: Challenges and future directions. IEEE Netw. 2020, 34, 278–283. [Google Scholar] [CrossRef]
- Moses, F. Optimum structural design using linear programming. J. Struct. Div. 1964, 90, 89–104. [Google Scholar] [CrossRef]
- Gomory, R.E. Outline of an Algorithm for Integer Solutions to Linear Programs and an Algorithm for the Mixed Integer Problem; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Keane, J.F.; Carr, S.S. A brief history of early unmanned aircraft. Johns Hopkins APL Tech. Dig. 2013, 32, 558–571. [Google Scholar]
- Yongfeng, L.; Yongxi, L.; Jingping, S.; Weihua, L. UAV’s air combat decision-making based on deep deterministic policy gradient and prediction. Xibei Gongye Daxue Xuebao/J. Northwestern Polytech. Univ. 2023, 41, 56–64. [Google Scholar]
- Tarjan, R. Depth-first search and linear graph algorithms. SIAM J. Comput. 1972, 1, 146–160. [Google Scholar] [CrossRef]
- Kurant, M.; Markopoulou, A.; Thiran, P. On the bias of BFS (breadth first search). In Proceedings of the 2010 22nd International Teletraffic Congress (LTC 22), Amsterdam, The Netherlands, 7–9 September 2010; pp. 1–8. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. In Edsger Wybe Dijkstra: His Life, Work, and Legacy; Association for Computing Machinery: New York, NY, USA, 2022; pp. 287–290. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- De Filippis, L.; Guglieri, G.; Quagliotti, F. Path planning strategies for UAVS in 3D environments. J. Intell. Robot. Syst. 2012, 65, 247–264. [Google Scholar] [CrossRef]
- Korf, R.E. Depth-first iterative-deepening: An optimal admissible tree search. Artif. Intell. 1985, 27, 97–109. [Google Scholar] [CrossRef]
- Korf, R.E.; Reid, M.; Edelkamp, S. Time complexity of iterative-deepening-A*. Artif. Intell. 2001, 129, 199–218. [Google Scholar] [CrossRef]
- Hwang, Y.K.; Ahuja, N. A potential field approach to path planning. IEEE Trans. Robot. Autom. 1992, 8, 23–32. [Google Scholar] [CrossRef]
- Bohlin, R.; Kavraki, L.E. Path planning using lazy PRM. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; pp. 521–528. [Google Scholar]
- Karaman, S.; Walter, M.R.; Perez, A.; Frazzoli, E.; Teller, S. Anytime motion planning using the RRT. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1478–1483. [Google Scholar]
- Qureshi, A.H.; Ayaz, Y. Intelligent bidirectional rapidly-exploring random trees for optimal motion planning in complex cluttered environments. Robot. Auton. Syst. 2015, 68, 1–11. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Dorigo, M.; Gambardella, L.M. Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 1995, November 27–December 1; pp. 1942–1948.
- Passino, K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control Syst. Mag. 2002, 22, 52–67. [Google Scholar]
- Blum, C. Ant colony optimization: Introduction and recent trends. Phys. Life Rev. 2005, 2, 353–373. [Google Scholar] [CrossRef]
- Wang, G.-Y.; Cheng, D.-D.; Xia, D.-Y.; Jiang, H.-H. Swarm intelligence research: From bio-inspired single-population swarm intelligence to human-machine hybrid swarm intelligence. Mach. Intell. Res. 2023, 20, 121–144. [Google Scholar] [CrossRef]
- Xiao, R. Four development stages of collective intelligence. Front. Inf. Technol. Electron. Eng. 2024, 25, 903–916. [Google Scholar] [CrossRef]
- Sharma, A.; Shoval, S.; Sharma, A.; Pandey, J.K. Path planning for multiple targets interception by the swarm of UAVs based on swarm intelligence algorithms: A review. IETE Tech. Rev. 2022, 39, 675–697. [Google Scholar] [CrossRef]
- Yao, R.; Hu, Y.; Varga, L. Applications of agent-based methods in multi-energy Systems—A systematic literature review. Energies 2023, 16, 2456. [Google Scholar] [CrossRef]
- Jingnan, L.; Jiao, Z.; Chi, G.; Ying, L.; Hangbin, W.; He, H. Data logic structure and key technologies on intelligent high-precision map. Acta Geod. Cartogr. Sin. 2019, 48, 939. [Google Scholar]
- Ruz, J.J.; Pajares, G.; de la Cruz, J.M.; Arevalo, O. UAV Trajectory Planning for Static and Dynamic Environments; Citeseer: University Park, PA, USA, 2009. [Google Scholar]
- Stamadianos, T.; Taxidou, A.; Marinaki, M.; Marinakis, Y. Swarm intelligence and nature inspired algorithms for solving vehicle routing problems: A survey. Oper. Res. 2024, 24, 47. [Google Scholar] [CrossRef]
- Shaikh, P.W.; El-Abd, M.; Khanafer, M.; Gao, K. A review on swarm intelligence and evolutionary algorithms for solving the traffic signal control problem. IEEE Trans. Intell. Transp. Syst. 2020, 23, 48–63. [Google Scholar] [CrossRef]
- Dabass, V.; Sangwan, S. Swarm Based Optimization Algorithms for Task Allocation In Multi Robot Systems: A Comprehensive Review. Educ. Adm. Theory Pract. 2024, 30, 2689–2695. [Google Scholar]
- Risi, B.-G.; Riganti-Fulginei, F.; Laudani, A. Modern techniques for the optimal power flow problem: State of the art. Energies 2022, 15, 6387. [Google Scholar] [CrossRef]
- Zhao, Z.; Fu, Y.; Pu, J.; Wang, Z.; Shen, S.; Ma, D.; Xie, Q.; Zhou, F. Performance decay prediction model of proton exchange membrane fuel cell based on particle swarm optimization and gate recurrent unit. Energy AI 2024, 17, 100399. [Google Scholar] [CrossRef]
- El Khediri, S.; Fakhet, W.; Moulahi, T.; Khan, R.; Thaljaoui, A.; Kachouri, A. Improved node localization using K-means clustering for Wireless Sensor Networks. Comput. Sci. Rev. 2020, 37, 100284. [Google Scholar] [CrossRef]
- Kaya, E.; Gorkemli, B.; Akay, B.; Karaboga, D. A review on the studies employing artificial bee colony algorithm to solve combinatorial optimization problems. Eng. Appl. Artif. Intell. 2022, 115, 105311. [Google Scholar] [CrossRef]
- Amutha, J.; Sharma, S.; Sharma, S.K. Strategies based on various aspects of clustering in wireless sensor networks using classical, optimization and machine learning techniques: Review, taxonomy, research findings, challenges and future directions. Comput. Sci. Rev. 2021, 40, 100376. [Google Scholar] [CrossRef]
- Aslam, M.S.; Bilal, H.; Chang, W.J.; Yahya, A.; Badruddin, I.A.; Kamangar, S.; Hussien, M. Formation control of heterogeneous multi–agent systems under fixed and switching hierarchies. IEEE Access 2024, 12, 97868–97882. [Google Scholar] [CrossRef]
- Yang, D.; Su, C.; Wu, H.; Xu, X.; Zhao, X. Construction of novel self-adaptive dynamic window approach combined with fuzzy neural network in complex dynamic environments. IEEE Access 2022, 10, 104375–104383. [Google Scholar] [CrossRef]
- Dong, X.; Zhou, Y.; Ren, Z.; Zhong, Y. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Trans. Ind. Electron. 2016, 64, 5014–5024. [Google Scholar] [CrossRef]
- Amirkhani, A.; Barshooi, A.H. Consensus in multi-agent systems: A review. Artif. Intell. Rev. 2022, 55, 3897–3935. [Google Scholar] [CrossRef]
- Canese, L.; Cardarilli, G.C.; Di Nunzio, L.; Fazzolari, R.; Giardino, D.; Re, M.; Spanò, S. Multi-agent reinforcement learning: A review of challenges and applications. Appl. Sci. 2021, 11, 4948. [Google Scholar] [CrossRef]
- Qin, J.; Ma, Q.; Shi, Y.; Wang, L. Recent advances in consensus of multi-agent systems: A brief survey. IEEE Trans. Ind. Electron. 2016, 64, 4972–4983. [Google Scholar] [CrossRef]
- Ma, H. Intelligent planning for large-scale multi-agent systems. AI Mag. 2022, 43, 376–382. [Google Scholar] [CrossRef]
- Pan, Z.; Wang, R.; Bi, Q.; Zhang, X.; Yu, J. RH-ECBS: Enhanced conflict-based search for MRPP with region heuristics. Robotica 2024, 42, 1–11. [Google Scholar] [CrossRef]
- Soares, V.C.; Roboredo, M. On the exact solution of the multi-depot open vehicle routing problem. Optim. Lett. 2024, 18, 1053–1069. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, G.; Song, Y. Task assignment of the improved contract net protocol under a multi-agent system. Algorithms 2019, 12, 70. [Google Scholar] [CrossRef]
- Liu, W.; Wang, J.; Zhang, K.; Yu, H.; Zheng, Z.; Lu, G. HG-CBS Planner: Heuristic Group-based Motion Planning for Multi-robot. In Proceedings of the 2023 IEEE 18th Conference on Industrial Electronics and Applications (ICIEA), Ningbo, China, 18–22 August 2023; pp. 687–692. [Google Scholar]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans. Ind. Inform. 2012, 9, 427–438. [Google Scholar] [CrossRef]
- Yijing, Z.; Zheng, Z.; Xiaoyi, Z.; Yang, L. Q learning algorithm based UAV path learning and obstacle avoidence approach. In Proceedings of the 2017 36th Chinese control conference (CCC), Dalian, China, 26–28 July 2017; pp. 3397–3402. [Google Scholar]
- Azzam, R.; Boiko, I.; Zweiri, Y. Swarm cooperative navigation using centralized training and decentralized execution. Drones 2023, 7, 193. [Google Scholar] [CrossRef]
- Samende, C.; Cao, J.; Fan, Z. Multi-agent deep deterministic policy gradient algorithm for peer-to-peer energy trading considering distribution network constraints. Appl. Energy 2022, 317, 119123. [Google Scholar] [CrossRef]
- Maoudj, A.; Hentout, A. Optimal path planning approach based on Q-learning algorithm for mobile robots. Appl. Soft Comput. 2020, 97, 106796. [Google Scholar] [CrossRef]
- Yan, C.; Xiang, X. A path planning algorithm for UAV based on improved Q-learning. In Proceedings of the 2018 2nd International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 23–25 June 2018; pp. 1–5. [Google Scholar]
- Hu, K.; Li, M.; Song, Z.; Xu, K.; Xia, Q.; Sun, N.; Zhou, P.; Xia, M. A review of research on reinforcement learning algorithms for multi-agents. Neurocomputing 2024, 599, 128068. [Google Scholar] [CrossRef]
- Sartoretti, G.; Kerr, J.; Shi, Y.; Wagner, G.; Kumar, T.S.; Koenig, S.; Choset, H. Primal: Pathfinding via reinforcement and imitation multi-agent learning. IEEE Robot. Autom. Lett. 2019, 4, 2378–2385. [Google Scholar] [CrossRef]
- Skrynnik, A.; Yakovleva, A.; Davydov, V.; Yakovlev, K.; Panov, A.I. Hybrid policy learning for multi-agent pathfinding. IEEE Access 2021, 9, 126034–126047. [Google Scholar] [CrossRef]
- Skrynnik, A.; Andreychuk, A.; Yakovlev, K.; Panov, A. Decentralized Monte Carlo Tree Search for Partially Observable Multi-Agent Pathfinding. In Proceedings of the AAAI Conference on Artificial Intelligence, Vancouver, BC, Canada, 20–27 February 2024; pp. 17531–17540. [Google Scholar]
- Shi, Q.; Liu, M.; Zhang, S.; Zheng, R.; Lan, X. Multi-Agent Path Finding Method Based on Evolutionary Reinforcement Learning. In Proceedings of the 2024 43rd Chinese Control Conference (CCC), Kunming, China, 28–31 July 2024; pp. 5728–5733. [Google Scholar]
- Pan, W.; Jian, L.; Liu, T. Grey system theory trends from 1991 to 2018: A bibliometric analysis and visualization. Scientometrics 2019, 121, 1407–1434. [Google Scholar] [CrossRef]
- Chen, C. CiteSpace II: Detecting and visualizing emerging trends and transient patterns in scientific literature. J. Am. Soc. Inf. Sci. Technol. 2006, 57, 359–377. [Google Scholar] [CrossRef]
- Chen, C. Science mapping: A systematic review of the literature. J. Data Inf. Sci. 2017, 2, 1–40. [Google Scholar] [CrossRef]
- Van Eck, N.; Waltman, L. Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef]
- Arruda, H.; Silva, E.R.; Lessa, M.; Proença, D., Jr.; Bartholo, R. VOSviewer and bibliometrix. J. Med. Libr. Assoc. JMLA 2022, 110, 392. [Google Scholar] [CrossRef]
- Aria, M.; Cuccurullo, C. bibliometrix: An R-tool for comprehensive science mapping analysis. J. Informetr. 2017, 11, 959–975. [Google Scholar] [CrossRef]
- Waltman, L.; Van Eck, N.J.; Noyons, E.C. A unified approach to mapping and clustering of bibliometric networks. J. Informetr. 2010, 4, 629–635. [Google Scholar] [CrossRef]
- Donthu, N.; Kumar, S.; Mukherjee, D.; Pandey, N.; Lim, W.M. How to conduct a bibliometric analysis: An overview and guidelines. J. Bus. Res. 2021, 133, 285–296. [Google Scholar] [CrossRef]
- Chen, C.; Ibekwe-SanJuan, F.; Hou, J. The structure and dynamics of cocitation clusters: A multiple-perspective cocitation analysis. J. Am. Soc. Inf. Sci. Technol. 2010, 61, 1386–1409. [Google Scholar] [CrossRef]
- Chen, C.; Chen, Y.; Horowitz, M.; Hou, H.; Liu, Z.; Pellegrino, D. Towards an explanatory and computational theory of scientific discovery. J. Informetr. 2009, 3, 191–209. [Google Scholar] [CrossRef]
- Shibata, N.; Kajikawa, Y.; Takeda, Y.; Matsushima, K. Detecting emerging research fronts based on topological measures in citation networks of scientific publications. Technovation 2008, 28, 758–775. [Google Scholar] [CrossRef]
- Sabe, M.; Chen, C.; Sentissi, O.; Deenik, J.; Vancampfort, D.; Firth, J.; Smith, L.; Stubbs, B.; Rosenbaum, S.; Schuch, F.B. Thirty years of research on physical activity, mental health, and wellbeing: A scientometric analysis of hotspots and trends. Front. Public Health 2022, 10, 943435. [Google Scholar] [CrossRef]
- Li, J. Principles and Applications of Mapping knowledge domains: A Beginner’s Guide to VOSviewer and CitNetExplorer. Beijing 2018, 2018, 53. [Google Scholar]
- Shi, D.; Chen, Z.; Zhang, X.; Xie, C. Intelligent mine safety risk based on knowledge graph: Hotspots and frontiers. Environ. Sci. Pollut. Res. 2024, 31, 20699–20713. [Google Scholar] [CrossRef]
- Wu, H.; Wang, Y.; Tong, L.; Yan, H.; Sun, Z. Global research trends of ferroptosis: A rapidly evolving field with enormous potential. Front. Cell Dev. Biol. 2021, 9, 646311. [Google Scholar] [CrossRef]
- Schubert, A.; Glänzel, W. A systematic analysis of Hirsch-type indices for journals. J. Informetr. 2007, 1, 179–184. [Google Scholar] [CrossRef]
- Duan, H.; Luo, Q.; Shi, Y.; Ma, G. Hybrid particle swarm optimization and genetic algorithm for multi-UAV formation reconfiguration. IEEE Comput. Intell. Mag. 2013, 8, 16–27. [Google Scholar] [CrossRef]
- Dong, X.; Hua, Y.; Zhou, Y.; Ren, Z.; Zhong, Y. Theory and experiment on formation-containment control of multiple multirotor unmanned aerial vehicle systems. IEEE Trans. Autom. Sci. Eng. 2018, 16, 229–240. [Google Scholar] [CrossRef]
- Chen, J.; Ling, F.; Zhang, Y.; You, T.; Liu, Y.; Du, X. Coverage path planning of heterogeneous unmanned aerial vehicles based on ant colony system. Swarm Evol. Comput. 2022, 69, 101005. [Google Scholar] [CrossRef]
- Li, Y.; Chen, H.; Er, M.J.; Wang, X. Coverage path planning for UAVs based on enhanced exact cellular decomposition method. Mechatronics 2011, 21, 876–885. [Google Scholar] [CrossRef]
- Yu, Z.; Liu, Z.; Zhang, Y.; Qu, Y.; Su, C.-Y. Distributed finite-time fault-tolerant containment control for multiple unmanned aerial vehicles. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 2077–2091. [Google Scholar] [CrossRef] [PubMed]
- Yu, Z.; Qu, Y.; Zhang, Y. Distributed fault-tolerant cooperative control for multi-UAVs under actuator fault and input saturation. IEEE Trans. Control Syst. Technol. 2018, 27, 2417–2429. [Google Scholar] [CrossRef]
- Huang, S.; Tang, L.; Hupy, J.P.; Wang, Y.; Shao, G. A commentary review on the use of normalized difference vegetation index (NDVI) in the era of popular remote sensing. J. For. Res. 2021, 32, 1–6. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. UAV remote sensing for urban vegetation mapping using random forest and texture analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, H.; Niu, Y.; Han, W. Mapping maize water stress based on UAV multispectral remote sensing. Remote Sens. 2019, 11, 605. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput maximization for UAV-enabled mobile relaying systems. IEEE Trans. Commun. 2016, 64, 4983–4996. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- Hu, S.; Yuan, X.; Ni, W.; Wang, X.; Jamalipour, A. Visual camouflage and online trajectory planning for unmanned aerial vehicle-based disguised video surveillance: Recent advances and a case study. IEEE Veh. Technol. Mag. 2023, 18, 48–57. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Ni, W. Online UAV trajectory planning for covert video surveillance of mobile targets. IEEE Trans. Autom. Sci. Eng. 2021, 19, 735–746. [Google Scholar] [CrossRef]
- Li, B.; Gao, S.; Li, C.; Wan, H. Maritime buoyage inspection system based on an unmanned aerial vehicle and active disturbance rejection control. IEEE Access 2021, 9, 22883–22893. [Google Scholar] [CrossRef]
- Savkin, A.V.; Verma, S.C.; Ni, W. Autonomous UAV 3D trajectory optimization and transmission scheduling for sensor data collection on uneven terrains. Def. Technol. 2023, 30, 154–160. [Google Scholar] [CrossRef]
- Carley, S.S.; Price, S.R.; Butler, S.J.; Honigfort, H.B. Gravitational-inspired wayfinding for drone swarms: A conceptual path planning method. In Proceedings of the Unmanned Systems Technology XXVI, San Diego, CA, USA, 23–25 April 2024; pp. 118–130. [Google Scholar]
- Scott, D.; Manyam, S.G.; Casbeer, D.W.; Kumar, M.; Rothenberger, M.J.; Weintraub, I.E. Power management for noise aware path planning of hybrid UAVs. In Proceedings of the 2022 American Control Conference (ACC), Atlanta, GA, USA, 8–10 June 2022; pp. 4280–4285. [Google Scholar]
- Chapnevis, A.; Güvenç, I.; Njilla, L.; Bulut, E. Collaborative trajectory optimization for outage-aware cellular-enabled UAVs. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–6. [Google Scholar]
- Jeong, S.; Simeone, O.; Kang, J. Mobile edge computing via a UAV-mounted cloudlet: Optimization of bit allocation and path planning. IEEE Trans. Veh. Technol. 2017, 67, 2049–2063. [Google Scholar] [CrossRef]
- Hu, Q.; Cai, Y.; Yu, G.; Qin, Z.; Zhao, M.; Li, G.Y. Joint offloading and trajectory design for UAV-enabled mobile edge computing systems. IEEE Internet Things J. 2018, 6, 1879–1892. [Google Scholar] [CrossRef]
- Yang, Z.; Pan, C.; Wang, K.; Shikh-Bahaei, M. Energy efficient resource allocation in UAV-enabled mobile edge computing networks. IEEE Trans. Wirel. Commun. 2019, 18, 4576–4589. [Google Scholar] [CrossRef]
- Wang, X.; Gursoy, M.C.; Erpek, T.; Sagduyu, Y.E. Learning-based UAV path planning for data collection with integrated collision avoidance. IEEE Internet Things J. 2022, 9, 16663–16676. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, C.; Ni, W. Joint multi-UAV path planning and LoS communication for mobile-edge computing in IoT networks with RISs. IEEE Internet Things J. 2022, 10, 2720–2727. [Google Scholar] [CrossRef]
- Maboudi, M.; Homaei, M.; Song, S.; Malihi, S.; Saadatseresht, M.; Gerke, M. A Review on Viewpoints and Path Planning for UAV-Based 3-D Reconstruction. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 5026–5048. [Google Scholar] [CrossRef]
- Du, B.; Chen, J. Unmanned-Aerial-Vehicle Online Trajectory Planning Using Confidence Bounds of Chance-Constrained Geofences. J. Guid. Control Dyn. 2025, 48, 115–126. [Google Scholar] [CrossRef]
- Lee, G.; Kim, K.; Jang, J. Real-time path planning of controllable UAV by subgoals using goal-conditioned reinforcement learning. Appl. Soft Comput. 2023, 146, 110660. [Google Scholar] [CrossRef]
- Park, Y.M.; Tun, Y.K.; Han, Z.; Hong, C.S. Trajectory optimization and phase-shift design in IRS-assisted UAV network for smart railway. IEEE Trans. Veh. Technol. 2022, 71, 11317–11321. [Google Scholar] [CrossRef]
- Lai, R.; Zhang, B.; Gong, G.; Yuan, H.; Yang, J.; Zhang, J.; Zhou, M. Energy-Efficient Scheduling in UAV-Assisted Hierarchical Wireless Sensor Networks. IEEE Internet Things J. 2024, 11, 20194–20206. [Google Scholar] [CrossRef]
- Chen, C.; Leydesdorff, L. Patterns of connections and movements in dual-map overlays: A new method of publication portfolio analysis. J. Assoc. Inf. Sci. Technol. 2014, 65, 334–351. [Google Scholar] [CrossRef]
- Reyes, M.; Crauser, D.; Prado, A.; Le Conte, Y. Flight activity of honey bee (Apis mellifera) drones. Apidologie 2019, 50, 669–680. [Google Scholar] [CrossRef]
- Li, X.; Andaloro, J.T.; Lang, E.B.; Pan, Y. Best management practices for unmanned aerial vehicles (UAVs) application of insecticide products on rice. In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019; p. 1. [Google Scholar]
- Marchowski, D. Drones, automatic counting tools, and artificial neural networks in wildlife population censusing. Ecol. Evol. 2021, 11, 16214. [Google Scholar] [CrossRef]
- Klemas, V.V. Coastal and environmental remote sensing from unmanned aerial vehicles: An overview. J. Coast. Res. 2015, 31, 1260–1267. [Google Scholar] [CrossRef]
- Baena, S.; Moat, J.; Whaley, O.; Boyd, D.S. Identifying species from the air: UAVs and the very high resolution challenge for plant conservation. PLoS ONE 2017, 12, e0188714. [Google Scholar] [CrossRef] [PubMed]
- Wachenheim, C.; Fan, L.; Zheng, S. Adoption of unmanned aerial vehicles for pesticide application: Role of social network, resource endowment, and perceptions. Technol. Soc. 2021, 64, 101470. [Google Scholar] [CrossRef]
- Luppicini, R.; So, A. A technoethical review of commercial drone use in the context of governance, ethics, and privacy. Technol. Soc. 2016, 46, 109–119. [Google Scholar] [CrossRef]
- Szymanowicz, S.; Rupprecht, C.; Vedaldi, A. Splatter image: Ultra-fast single-view 3d reconstruction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–22 June 2024; pp. 10208–10217. [Google Scholar]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV photogrammetry for mapping and 3D modeling: Current status and future perspectives. In Proceedings of the International Conference on Unmanned Aerial Vehicle in Geomatics (UAV-g), Zurich, Switzerland, 14–16 September 2011; pp. 25–31. [Google Scholar]
- Frattolillo, F.; Brunori, D.; Iocchi, L. Scalable and cooperative deep reinforcement learning approaches for multi-UAV systems: A systematic review. Drones 2023, 7, 236. [Google Scholar] [CrossRef]
- Eisenbeiss, H. A mini unmanned aerial vehicle (UAV): System overview and image acquisition. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36, 1–7. [Google Scholar]
- Pajares, G. Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef]
- Bemis, S.P.; Micklethwaite, S.; Turner, D.; James, M.R.; Akciz, S.; Thiele, S.T.; Bangash, H.A. Ground-based and UAV-Based photogrammetry: A multi-scale, high-resolution mapping tool for structural geology and paleoseismology. J. Struct. Geol. 2014, 69, 163–178. [Google Scholar] [CrossRef]
- Villarreal, C.A.; Garzón, C.G.; Mora, J.P.; Rojas, J.D.; Ríos, C.A. Workflow for capturing information and characterizing difficult-to-access geological outcrops using unmanned aerial vehicle-based digital photogrammetric data. J. Ind. Inf. Integr. 2022, 26, 100292. [Google Scholar] [CrossRef]
- Baran, P.; Mayo, S.; McCormack, M.; Pacile, S.; Tromba, G.; Dullin, C.; Zanconati, F.; Arfelli, F.; Dreossi, D.; Fox, J. High-resolution X-ray phase-contrast 3-D imaging of breast tissue specimens as a possible adjunct to histopathology. IEEE Trans. Med. Imaging 2018, 37, 2642–2650. [Google Scholar] [CrossRef]
- Vetter, K.; Barnowski, R.; Cates, J.W.; Haefner, A.; Joshi, T.H.; Pavlovsky, R.; Quiter, B.J. Advances in nuclear radiation sensing: Enabling 3-D gamma-ray vision. Sensors 2019, 19, 2541. [Google Scholar] [CrossRef]
- Calisi, D.; Botta, S.; Cannata, A. Integrated Surveying, from Laser Scanning to UAV Systems, for Detailed Documentation of Architectural and Archeological Heritage. Drones 2023, 7, 568. [Google Scholar] [CrossRef]
- Pepe, M.; Alfio, V.S.; Costantino, D. UAV platforms and the SfM-MVS approach in the 3D surveys and modelling: A review in the cultural heritage field. Appl. Sci. 2022, 12, 12886. [Google Scholar] [CrossRef]
- Akhlaqi, M.Y.; Hanapi, Z.B.M. Task offloading paradigm in mobile edge computing-current issues, adopted approaches, and future directions. J. Netw. Comput. Appl. 2023, 212, 103568. [Google Scholar] [CrossRef]
- Gao, Y.; Tao, J.; Wang, H.; Wang, Z.; Zou, D.; Xu, Y. Benefit-oriented task offloading in UAV-aided mobile edge computing: An approximate solution. Peer—Peer Netw. Appl. 2023, 16, 2058–2072. [Google Scholar] [CrossRef]
- Yu, Z.; Gong, Y.; Gong, S.; Guo, Y. Joint task offloading and resource allocation in UAV-enabled mobile edge computing. IEEE Internet Things J. 2020, 7, 3147–3159. [Google Scholar] [CrossRef]
- Du, S.; Chen, X.; Jiao, L.; Lu, Y. Energy efficient task offloading for UAV-assisted mobile edge computing. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 6567–6571. [Google Scholar]
- Yuan, H.; Wang, M.; Bi, J.; Shi, S.; Yang, J.; Zhang, J.; Zhou, M.; Buyya, R. Cost-Efficient Task Offloading in Mobile Edge Computing with Layered Unmanned Aerial Vehicles. IEEE Internet Things J. 2024, 11, 30496–30509. [Google Scholar] [CrossRef]
- Cheng, N.; Lyu, F.; Quan, W.; Zhou, C.; He, H.; Shi, W.; Shen, X. Space/aerial-assisted computing offloading for IoT applications: A learning-based approach. IEEE J. Sel. Areas Commun. 2019, 37, 1117–1129. [Google Scholar] [CrossRef]
- Salhaoui, M.; Guerrero-González, A.; Arioua, M.; Ortiz, F.J.; El Oualkadi, A.; Torregrosa, C.L. Smart industrial iot monitoring and control system based on UAV and cloud computing applied to a concrete plant. Sensors 2019, 19, 3316. [Google Scholar] [CrossRef]
- Solodov, A.; Williams, A.; Al Hanaei, S.; Goddard, B. Analyzing the threat of unmanned aerial vehicles (UAV) to nuclear facilities. Secur. J. 2018, 31, 305–324. [Google Scholar] [CrossRef]
- Saunders, J.; Saeedi, S.; Li, W. Autonomous aerial robotics for package delivery: A technical review. J. Field Robot. 2024, 41, 3–49. [Google Scholar] [CrossRef]
- Azar, A.T.; Koubaa, A.; Ali Mohamed, N.; Ibrahim, H.A.; Ibrahim, Z.F.; Kazim, M.; Ammar, A.; Benjdira, B.; Khamis, A.M.; Hameed, I.A. Drone deep reinforcement learning: A review. Electronics 2021, 10, 999. [Google Scholar] [CrossRef]
- Mac, T.T.; Copot, C.; De Keyser, R.; Ionescu, C.M. The development of an autonomous navigation system with optimal control of an UAV in partly unknown indoor environment. Mechatronics 2018, 49, 187–196. [Google Scholar] [CrossRef]
- Santoso, F.; Garratt, M.A.; Anavatti, S.G. State-of-the-art intelligent flight control systems in unmanned aerial vehicles. IEEE Trans. Autom. Sci. Eng. 2017, 15, 613–627. [Google Scholar] [CrossRef]
- Meier, L.; Tanskanen, P.; Heng, L.; Lee, G.H.; Fraundorfer, F.; Pollefeys, M. PIXHAWK: A micro aerial vehicle design for autonomous flight using onboard computer vision. Auton. Robot. 2012, 33, 21–39. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, D.; Li, W.; Wang, Z.; Huang, Y.; You, Y.; Becker, S. Current technologies and challenges of applying fuel cell hybrid propulsion systems in unmanned aerial vehicles. Prog. Aerosp. Sci. 2020, 116, 100620. [Google Scholar] [CrossRef]
- Pan, Z.; An, L.; Wen, C. Recent advances in fuel cells based propulsion systems for unmanned aerial vehicles. Appl. Energy 2019, 240, 473–485. [Google Scholar] [CrossRef]
- Thisanke, H.; Deshan, C.; Chamith, K.; Seneviratne, S.; Vidanaarachchi, R.; Herath, D. Semantic segmentation using Vision Transformers: A survey. Eng. Appl. Artif. Intell. 2023, 126, 106669. [Google Scholar] [CrossRef]
- Park, J.K.; Park, J.H. Crops classification using imagery of unmanned aerial vehicle (UAV). J. Korean Soc. Agric. Eng. 2015, 57, 91–97. [Google Scholar]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-based crop and weed classification for smart farming. In Proceedings of the 2017 IEEE international conference on robotics and automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3024–3031. [Google Scholar]
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; Taberkit, A.M. Deep learning techniques to classify agricultural crops through UAV imagery: A review. Neural Comput. Appl. 2022, 34, 9511–9536. [Google Scholar] [CrossRef]
- Yang, M.-D.; Tseng, H.-H.; Hsu, Y.-C.; Tsai, H.P. Semantic segmentation using deep learning with vegetation indices for rice lodging identification in multi-date UAV visible images. Remote Sens. 2020, 12, 633. [Google Scholar] [CrossRef]
- Beard, R.W.; McLain, T.W.; Goodrich, M.A.; Anderson, E.P. Coordinated target assignment and intercept for unmanned air vehicles. IEEE Trans. Robot. Autom. 2002, 18, 911–922. [Google Scholar] [CrossRef]
- McLain, T.W.; Beard, R.W.; Barber, D.B.; Knoebel, N.B. An Overview of MAV Research at Brigham Young University; NATO: Brussels, Belgium, 2007. [Google Scholar]
- McLain, T.W.; Chandler, P.R.; Rasmussen, S.; Pachter, M. Cooperative control of UAV rendezvous. In Proceedings of the 2001 American Control Conference. (Cat. No. 01CH37148), Arlington, VA, USA, 25–27 June 2001; pp. 2309–2314. [Google Scholar]
- Ryan, A.; Zennaro, M.; Howell, A.; Sengupta, R.; Hedrick, J.K. An overview of emerging results in cooperative UAV control. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No. 04CH37601), Atlantis, Bahamas, 14–17 December 2004; pp. 602–607. [Google Scholar]
- Zhou, A.; Qu, B.-Y.; Li, H.; Zhao, S.-Z.; Suganthan, P.N.; Zhang, Q. Multiobjective evolutionary algorithms: A survey of the state of the art. Swarm Evol. Comput. 2011, 1, 32–49. [Google Scholar] [CrossRef]
- Van Veldhuizen, D.A.; Lamont, G.B. Multiobjective evolutionary algorithms: Analyzing the state-of-the-art. Evol. Comput. 2000, 8, 125–147. [Google Scholar] [CrossRef] [PubMed]
- Nikolos, I.K.; Valavanis, K.P.; Tsourveloudis, N.C.; Kostaras, A.N. Evolutionary algorithm based offline/online path planner for UAV navigation. IEEE Trans. Syst. Man Cybern. Part B 2003, 33, 898–912. [Google Scholar] [CrossRef]
- Duan, H.; Liu, S. Unmanned air/ground vehicles heterogeneous cooperative techniques: Current status and prospects. Sci. China Technol. Sci. 2010, 53, 1349–1355. [Google Scholar] [CrossRef]
- Ceccarelli, N.; Enright, J.J.; Frazzoli, E.; Rasmussen, S.J.; Schumacher, C.J. Micro UAV path planning for reconnaissance in wind. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 11–13 July 2007; pp. 5310–5315. [Google Scholar]
- Ross, S.; Melik-Barkhudarov, N.; Shankar, K.S.; Wendel, A.; Dey, D.; Bagnell, J.A.; Hebert, M. Learning monocular reactive uav control in cluttered natural environments. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1765–1772. [Google Scholar]
- Bencatel, R.; de Sousa, J.T.; Girard, A. Atmospheric flow field models applicable for aircraft endurance extension. Prog. Aerosp. Sci. 2013, 61, 1–25. [Google Scholar] [CrossRef]
- Fu, Y.; Ding, M.; Zhou, C.; Hu, H. Route planning for unmanned aerial vehicle (UAV) on the sea using hybrid differential evolution and quantum-behaved particle swarm optimization. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 1451–1465. [Google Scholar] [CrossRef]
- Goerzen, C.; Kong, Z.; Mettler, B. A survey of motion planning algorithms from the perspective of autonomous UAV guidance. J. Intell. Robot. Syst. 2010, 57, 65–100. [Google Scholar] [CrossRef]
- Niendorf, M.; Schmitt, F.; Adolf, F. Multi-query path planning for an unmanned fixed-wing aircraft. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 4791. [Google Scholar]
- Wang, W.; Li, Y.; Xu, X.; Yang, S.X. An adaptive roadmap guided Multi-RRTs strategy for single query path planning. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 2871–2876. [Google Scholar]
- Radmanesh, M.; Kumar, M. Flight formation of UAVs in presence of moving obstacles using fast-dynamic mixed integer linear programming. Aerosp. Sci. Technol. 2016, 50, 149–160. [Google Scholar] [CrossRef]
- Berger, J.; Boukhtouta, A.; Benmoussa, A.; Kettani, O. A new mixed-integer linear programming model for rescue path planning in uncertain adversarial environment. Comput. Oper. Res. 2012, 39, 3420–3430. [Google Scholar] [CrossRef]
- Burdakov, O.; Doherty, P.; Holmberg, K.; Olsson, P.-M. Optimal placement of UV-based communications relay nodes. J. Glob. Optim. 2010, 48, 511–531. [Google Scholar] [CrossRef]
- Li, K.; Ni, W.; Wang, X.; Liu, R.P.; Kanhere, S.S.; Jha, S. Energy-efficient cooperative relaying for unmanned aerial vehicles. IEEE Trans. Mob. Comput. 2015, 15, 1377–1386. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef]
- Liu, B.; Lan, Y.; Huang, W.; Fan, Q. UAV Dynamic Path Planning Algorithm Combined with Dynamic Window Approach. J. Syst. Simul. 2024, 36, 1843–1853. [Google Scholar]
- Kadar, M.; Muntean, M.V.; Csabai, T. A Multi-agent System with Self-optimization for Automated Clustering (MASAC). In Agents and Multi-Agent Systems: Technologies and Applications 2019: 13th KES International Conference, KES-AMSTA-2019 St. Julians, Malta, June 2019 Proceedings; Springer: Berlin/Heidelberg, Germany, 2020; pp. 117–128. [Google Scholar]
- Guhathakurata, S.; Saha, S.; Kundu, S.; Chakraborty, A.; Banerjee, J.S. South Asian countries are less fatal concerning COVID-19: A hybrid approach using machine learning and M-AHP. In Computational Intelligence Techniques for Combating COVID-19; Springer: Berlin/Heidelberg, Germany, 2021; pp. 1–26. [Google Scholar]
- Liu, Y.; Luo, C.; Fan, L.; Wang, N.; Peng, J.; Zhang, Z. Citygaussian: Real-time high-quality large-scale scene rendering with gaussians. In Proceedings of the European Conference on Computer Vision, Paris, France, 26–27 March 2025; pp. 265–282. [Google Scholar]
- Gao, K.; Lu, D.; He, H.; Xu, L.; Li, J. Photorealistic 3D Urban Scene Reconstruction and Point Cloud Extraction using Google Earth Imagery and Gaussian Splatting. arXiv 2024, arXiv:2405.11021. [Google Scholar]
- Greenwood, W.W.; Lynch, J.P.; Zekkos, D. Applications of UAVs in civil infrastructure. J. Infrastruct. Syst. 2019, 25, 04019002. [Google Scholar] [CrossRef]
- Guan, S.; Zhu, Z.; Wang, G. A review on UAV-based remote sensing technologies for construction and civil applications. Drones 2022, 6, 117. [Google Scholar] [CrossRef]
- Kamarulzaman, A.M.M.; Jaafar, W.S.W.M.; Said, M.N.M.; Saad, S.N.M.; Mohan, M. UAV Implementations in Urban Planning and Related Sectors of Rapidly Developing Nations: A Review and Future Perspectives for Malaysia. Remote Sens. 2023, 15, 2845. [Google Scholar] [CrossRef]
- Bakirci, M. Smart city air quality management through leveraging drones for precision monitoring. Sustain. Cities Soc. 2024, 106, 105390. [Google Scholar] [CrossRef]
- Liu, P.; Chen, A.Y.; Huang, Y.-N.; Han, J.-Y.; Lai, J.-S.; Kang, S.-C.; Wu, T.-H.; Wen, M.-C.; Tsai, M.-H. A review of rotorcraft unmanned aerial vehicle (UAV) developments and applications in civil engineering. Smart Struct. Syst. 2014, 13, 1065–1094. [Google Scholar] [CrossRef]
- Zhou, S.; Gheisari, M. Unmanned aerial system applications in construction: A systematic review. Constr. Innov. 2018, 18, 453–468. [Google Scholar] [CrossRef]
- Mademlis, I.; Mygdalis, V.; Nikolaidis, N.; Pitas, I. Challenges in autonomous UAV cinematography: An overview. In Proceedings of the 2018 IEEE International Conference on Multimedia and Expo (ICME), San Diego, CA, USA, 23–27 July 2018; pp. 1–6. [Google Scholar]
- Handa, A.; Whelan, T.; McDonald, J.; Davison, A.J. A benchmark for RGB-D visual odometry, 3D reconstruction and SLAM. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1524–1531. [Google Scholar]
- Hu, D.; Minner, J. UAVs and 3D City Modeling to Aid Urban Planning and Historic Preservation: A Systematic Review. Remote Sens. 2023, 15, 5507. [Google Scholar] [CrossRef]
- Outay, F.; Mengash, H.A.; Adnan, M. Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transp. Res. Part A Policy Pract. 2020, 141, 116–129. [Google Scholar] [CrossRef] [PubMed]
- Rojas-Perez, L.O.; Martínez-Carranza, J. On-board processing for autonomous drone racing: An overview. Integration 2021, 80, 46–59. [Google Scholar] [CrossRef]
- Tan, C.S.; Mohd-Mokhtar, R.; Arshad, M.R. A comprehensive review of coverage path planning in robotics using classical and heuristic algorithms. IEEE Access 2021, 9, 119310–119342. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Yakunin, K.; Aubakirov, M.; Assanov, I.; Kuchin, Y.; Symagulov, A.; Levashenko, V.; Zaitseva, E.; Sokolov, D.; Amirgaliyev, Y. Coverage path planning optimization of heterogeneous UAVs group for precision agriculture. IEEE Access 2023, 11, 5789–5803. [Google Scholar] [CrossRef]
- Zhou, H.; Qin, H.; Cheng, C.; Rousseau, L.-M. An exact algorithm for the two-echelon vehicle routing problem with drones. Transp. Res. Part B Methodol. 2023, 168, 124–150. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Samir, M.; Sharafeddine, S.; Assi, C.M.; Nguyen, T.M.; Ghrayeb, A. UAV trajectory planning for data collection from time-constrained IoT devices. IEEE Trans. Wirel. Commun. 2019, 19, 34–46. [Google Scholar] [CrossRef]
- Wei, Z.; Zhu, M.; Zhang, N.; Wang, L.; Zou, Y.; Meng, Z.; Wu, H.; Feng, Z. UAV-assisted data collection for Internet of Things: A survey. IEEE Internet Things J. 2022, 9, 15460–15483. [Google Scholar] [CrossRef]
- Messaoudi, K.; Oubbati, O.S.; Rachedi, A.; Lakas, A.; Bendouma, T.; Chaib, N. A survey of UAV-based data collection: Challenges, solutions and future perspectives. J. Netw. Comput. Appl. 2023, 216, 103670. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, J.; Zhang, R. Energy minimization for wireless communication with rotary-wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345. [Google Scholar] [CrossRef]
- Zeng, Y.; Wu, Q.; Zhang, R. Accessing from the sky: A tutorial on UAV communications for 5G and beyond. Proc. IEEE 2019, 107, 2327–2375. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.-H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Cabreira, T.M.; Brisolara, L.B.; Paulo, R.F.J. Survey on coverage path planning with unmanned aerial vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. Ind. Inform. 2012, 9, 132–141. [Google Scholar] [CrossRef]
- Pehlivanoglu, Y.V. A new vibrational genetic algorithm enhanced with a Voronoi diagram for path planning of autonomous UAV. Aerosp. Sci. Technol. 2012, 16, 47–55. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, H. An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning. Appl. Soft Comput. 2015, 26, 270–284. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned aerial vehicle with underlaid device-to-device communications: Performance and tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar] [CrossRef]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement optimization of UAV-mounted mobile base stations. IEEE Commun. Lett. 2016, 21, 604–607. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Drone small cells in the clouds: Design, deployment and performance analysis. In Proceedings of the 2015 IEEE global communications conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Gao, H.; Ding, X. The research landscape on the artificial intelligence: A bibliometric analysis of recent 20 years. Multimed. Tools Appl. 2022, 81, 12973–13001. [Google Scholar] [CrossRef]
- Kim, S.Y.; Kwon, D.Y.; Jang, A.; Ju, Y.K.; Lee, J.-S.; Hong, S. A review of UAV integration in forensic civil engineering: From sensor technologies to geotechnical, structural and water infrastructure applications. Measurement 2024, 224, 113886. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV remote sensing applications in marine monitoring: Knowledge visualization and review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef]
- Pogaku, A.C.; Do, D.-T.; Lee, B.M.; Nguyen, N.D. UAV-assisted RIS for future wireless communications: A survey on optimization and performance analysis. IEEE Access 2022, 10, 16320–16336. [Google Scholar] [CrossRef]
- Lyu, M.; Zhao, Y.; Huang, C.; Huang, H. Unmanned aerial vehicles for search and rescue: A survey. Remote Sens. 2023, 15, 3266. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Winkenbach, M. Applications and Research avenues for drone-based models in logistics: A classification and review. Expert Syst. Appl. 2021, 177, 114854. [Google Scholar] [CrossRef]
- Li, K.; Yan, X.; Han, Y. Multi-mechanism swarm optimization for multi-UAV task assignment and path planning in transmission line inspection under multi-wind field. Appl. Soft Comput. 2024, 150, 111033. [Google Scholar] [CrossRef]
- Shen, K.; Shivgan, R.; Medina, J.; Dong, Z.; Rojas-Cessa, R. Multidepot drone path planning with collision avoidance. IEEE Internet Things J. 2022, 9, 16297–16307. [Google Scholar] [CrossRef]
- Yu, X.; Jiang, N.; Wang, X.; Li, M. A hybrid algorithm based on grey wolf optimizer and differential evolution for UAV path planning. Expert Syst. Appl. 2023, 215, 119327. [Google Scholar] [CrossRef]
- Xiong, T.; Li, H.; Ding, K.; Liu, H.; Li, Q. A Hybrid Improved Symbiotic Organisms Search and Sine–Cosine Particle Swarm Optimization Method for Drone 3D Path Planning. Drones 2023, 7, 633. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, J.; Zhao, Z.; Wang, X.; Chen, Y. A path-planning method considering environmental disturbance based on VPF-RRT. Drones 2023, 7, 145. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, S.; Chen, J.; Han, Y. A bionic dynamic path planning algorithm of the micro UAV based on the fusion of deep neural network optimization/filtering and hawk-eye vision. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 3728–3740. [Google Scholar] [CrossRef]
- Wang, Y.-C.; Chen, C.-Y. Efficient Path Planning for UAVs to Recognize Chimneys With Excessive Exhaust Emissions. IEEE Internet Things J. 2024, 11, 18580–18592. [Google Scholar] [CrossRef]
- Shen, L.; Hou, Y.; Yang, Q.; Lv, M.; Dong, J.-X.; Yang, Z.; Li, D. Synergistic path planning for ship-deployed multiple UAVs to monitor vessel pollution in ports. Transp. Res. Part D Transp. Environ. 2022, 110, 103415. [Google Scholar] [CrossRef]
- Long, Y.; Xu, G.; Zhao, J.; Xie, B.; Fang, M. Dynamic truck–uav collaboration and integrated route planning for resilient urban emergency response. IEEE Trans. Eng. Manag. 2023, 71, 9826–9838. [Google Scholar] [CrossRef]
- Zhao, R.; Huang, Y.; Luo, H.; Huang, X.; Zheng, Y. A framework for using UAVs to detect pavement damage based on optimal path planning and image splicing. Sustainability 2023, 15, 2182. [Google Scholar] [CrossRef]
- Xiao, Q.; Li, Y.; Luo, F.; Liu, H. Analysis and assessment of risks to public safety from unmanned aerial vehicles using fault tree analysis and Bayesian network. Technol. Soc. 2023, 73, 102229. [Google Scholar] [CrossRef]
- Yanmaz, E. Joint or decoupled optimization: Multi-UAV path planning for search and rescue. Ad Hoc Netw. 2023, 138, 103018. [Google Scholar] [CrossRef]
- Diao, Q.; Zhang, J.; Liu, M.; Yang, J. A Disaster Relief UAV Path Planning Based on APF-IRRT* Fusion Algorithm. Drones 2023, 7, 323. [Google Scholar] [CrossRef]
- Barnawi, A.; Kumar, K.; Kumar, N.; Thakur, N.; Alzahrani, B.; Almansour, A. Unmanned ariel vehicle (UAV) path planning for area segmentation in intelligent landmine detection systems. Sensors 2023, 23, 7264. [Google Scholar] [CrossRef]
- Hu, S.; Yuan, X.; Ni, W.; Wang, X. Trajectory planning of cellular-connected UAV for communication-assisted radar sensing. IEEE Trans. Commun. 2022, 70, 6385–6396. [Google Scholar] [CrossRef]
- Xu, L.; Cao, X.; Du, W.; Li, Y. Cooperative path planning optimization for multiple UAVs with communication constraints. Knowl.-Based Syst. 2023, 260, 110164. [Google Scholar] [CrossRef]
- Ali, A.M.; Perrusquía, A.; Guo, W.; Tsourdos, A. Flight plan optimisation of unmanned aerial vehicles with minimised radar observability using action shaping proximal policy optimisation. Drones 2024, 8, 546. [Google Scholar] [CrossRef]
- Li, Y.; Aghvami, A.H.; Dong, D. Path planning for cellular-connected UAV: A DRL solution with quantum-inspired experience replay. IEEE Trans. Wirel. Commun. 2022, 21, 7897–7912. [Google Scholar] [CrossRef]
- Yuan, X.; Jiang, H.; Hu, Y.; Schmeink, A. Joint analog beamforming and trajectory planning for energy-efficient UAV-enabled nonlinear wireless power transfer. IEEE J. Sel. Areas Commun. 2022, 40, 2914–2929. [Google Scholar] [CrossRef]
- Qin, Y.; Zhang, Z.; Li, X.; Huangfu, W.; Zhang, H. Deep reinforcement learning based resource allocation and trajectory planning in integrated sensing and communications UAV network. IEEE Trans. Wirel. Commun. 2023, 22, 8158–8169. [Google Scholar] [CrossRef]
- Sajid, M.; Mittal, H.; Pare, S.; Prasad, M. Routing and scheduling optimization for UAV assisted delivery system: A hybrid approach. Appl. Soft Comput. 2022, 126, 109225. [Google Scholar] [CrossRef]
- Zhang, H.; Tian, T.; Feng, O.; Wu, S.; Zhong, G. Research on Public Air Route Network Planning of Urban Low-Altitude Logistics Unmanned Aerial Vehicles. Sustainability 2023, 15, 12021. [Google Scholar] [CrossRef]
- Li, A.; Hansen, M.; Zou, B. Traffic management and resource allocation for UAV-based parcel delivery in low-altitude urban space. Transp. Res. Part C Emerg. Technol. 2022, 143, 103808. [Google Scholar] [CrossRef]
- Colajanni, G.; Daniele, P.; Nagurney, A. Centralized supply chain network optimization with UAV-based last mile deliveries. Transp. Res. Part C Emerg. Technol. 2023, 155, 104316. [Google Scholar] [CrossRef]
- Salama, M.R.; Srinivas, S. Collaborative truck multi-drone routing and scheduling problem: Package delivery with flexible launch and recovery sites. Transp. Res. Part E Logist. Transp. Rev. 2022, 164, 102788. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Symbol | Definition |
|---|---|---|---|
| Free space available for drone flight | Position function of the drone at time t | ||
| The initial position of the drone | Flight speed of the drone | ||
| The target position of the drone | Motor speed multiplier | ||
| Minimum power required for drone startup | Number of communication links on the path of the drone | ||
| Maximum power of the drone | Time taken between flight nodes of the drone | ||
| Total flight time of the drone | Startup time of the drone | ||
| Energy consumption cost | Overhead time | ||
| Altitude cost | Time spent hovering by the drone | ||
| Length cost | Flight reference altitude of the drone | ||
| Communication cost | Distance from point i to point j | ||
| Threat cost | Distance from the drone to the nearest obstacle | ||
| Smoothing cost | The current horizontal yaw angle of the drone | ||
| Total flight cost | The current vertical climb angle of the drone | ||
| Maximum normal load factor of the drone | The current turning radius of the drone |
| Source | Number | IF | H-Index | JCR | Co-Citation Frequency | Found Year |
|---|---|---|---|---|---|---|
| IEEE Access | 172 | 3.7 | 56 | Q2 | 3582 | 2013 |
| IEEE Internet of Things Journal | 129 | 9.0 | 47 | Q1 | 3194 | 2014 |
| Drones | 125 | 4.8 | 43 | Q1 | 2649 | 2017 |
| IEEE Transactions on Vehicular Technology | 123 | 6.5 | 146 | Q1 | 3173 | 1952 |
| Sensors | 111 | 3.7 | 132 | Q2 | 1572 | 2001 |
| Journal of Intelligent & Robotic Systems | 64 | 3.2 | 62 | Q2 | 1755 | 1988 |
| Applied Sciences-Basel | 62 | 2.7 | 23 | Q2 | 1569 | 2011 |
| IEEE Transactions on Wireless Communications | 59 | 8.6 | 186 | Q1 | 3895 | 2002 |
| Electronics | 51 | 2.6 | 21 | Q2 | 1327 | 2012 |
| IEEE Wireless Communications Letters | 41 | 4.9 | 46 | Q1 | 1502 | 2012 |
| R | Issuing Institutions | Number |
|---|---|---|
| 1 | Beihang University | 244 |
| 2 | Northwestern Polytechnical University | 183 |
| 3 | Chinese Academy of Sciences | 160 |
| 4 | Nanjing University of Aeronautics and Astronautics | 150 |
| 5 | Beijing Institute of Technology | 139 |
| 6 | National University of Defense Technology | 111 |
| 7 | Southeast University | 111 |
| 8 | Beijing Univ of Posts and Telecommunications | 105 |
| 9 | Xidian University | 73 |
| 10 | University of Electronic Science and Technology | 71 |
| 11 | Harbin Institute of Technology | 70 |
| 12 | University of New South Wales | 70 |
| 13 | Centre National de la Recherche Scientifique | 69 |
| 14 | National University of Singapore | 66 |
| 15 | United States Department of Defense | 65 |
| Sum | 1687 |
| R | C | Co-Citation | Title | T | C/Y | S | B |
|---|---|---|---|---|---|---|---|
| 1 [199] | 2599 | 195 | Wireless communications with unmanned aerial vehicles: Opportunities and challenges | 2016 | 324.88 | IEEE Communications Magazine | Y (56.721) |
| 2 [97] | 993 | 161 | Throughput Maximization for UAV-Enabled Mobile Relaying Systems | 2016 | 124.13 | IEEE Trans. Commun. | Y (47.007) |
| 3 [98] | 1474 | 227 | Energy-Efficient UAV Communication with Trajectory Optimization | 2017 | 210.57 | IEEE Trans. Wireless Commun. | Y (30.131) |
| 4 [200] | 516 | 122 | Energy-Efficient Data Collection in UAV Enabled Wireless Sensor Network | 2018 | 86 | IEEE Wireless Communications Letters | Y (6.614) |
| 5 [99] | 1304 | 258 | Joint Trajectory and Communication Design for Multi-UAV Enabled Wireless Networks | 2018 | 217.33 | IEEE Trans. Wireless Commun. | Y (23.423) |
| 6 [201] | 1114 | 289 | Energy Minimization for Wireless Communication with Rotary-Wing UAV | 2019 | 222.8 | IEEE Trans. Wireless Commun. | N |
| 7 [202] | 867 | 126 | Accessing From the Sky: A Tutorial on UAV Communications for 5G and Beyond | 2019 | 173.4 | Proc. IEEE | Y (6.584) |
| 8 [203] | 1590 | 176 | A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems | 2019 | 318 | IEEE Commun. Surv. Tutorials | N |
| 9 [204] | 268 | 104 | Survey on Coverage Path Planning with Unmanned Aerial Vehicles | 2019 | 53.6 | Drones | N |
| 10 [10] | 620 | 168 | Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges | 2020 | 155 | Comput. Commun. | N |
| Cluster | Size | Keywords (Occurrences) |
|---|---|---|
| a | 24 | trajectory optimization (514); resource management (133); energy consumption (123); systems (116); wireless communication (116); search (102); tracking (81); traveling salesman problem (62); route planning (59); coverage path planning (57); maximization (57); flight (49); NOMA (48); 5G (46); energy efficiency (39); physical layer security (39); avoidance (38); framework (36); UAV communications (34); security (34); batteries (30); safety (30); simulation (28);quality of service (25); efficient (25); transmission (25) |
| b | 24 | optimization (664); algorithm (334); genetic algorithm (110); system (110); particle swarm optimization (103); model (99); coverage (96); vehicles (65); differential evolution (65); algorithms (60); energy (59); altitude (57); vehicle dynamics (50); vehicle (48); generation (48); surveillance (45); robots (38); network (38); strategy (32); ant colony optimization (31); inspection (30); area coverage (27); costs (25); multi-objective optimization (25) |
| c | 23 | communication (277); networks (237); internet (138); internet of things (111); data collection (105); deep reinforcement learning (105); wireless sensor network (96); three-dimensional displays (74); throughput (71); sensors (68); performance (53); relays (49); throughput maximization (47); internet of things (IoT) (47); information (45); IoT (40); interference (36); jamming (30); sky (30); time (30); base stations (28); things (26); array signal processing (25) |
| d | 17 | navigation (139); obstacle avoidance (119); collision avoidance (89); deployment (65); motion and path planning (49); radar (46); localization (45); optimal control (36); robust (35); guidance (30); task assignment (29); exploration (27); model predictive control (27); approximation algorithms (27); motion (26); task allocation (25); mission planning (25) |
| e | 14 | design (408); allocation (111); trajectory design (97); power allocation (65); placement (59); challenges (56); data-collection (49); target tracking (47); power (45); wireless networks (38); deep learning (34); swarm (33); management (31); wireless (25) |
| f | 14 | task analysis (181); resource-allocation (175); heuristic algorithms (86); resource allocation (77); capacity (65); mobile edge computing (60); minimization (52); data models (43); servers (39); reconfigurable intelligent surface (37); edge (33); edge computing (30); assignment (28); task offloading (25) |
| Period | Keywords |
|---|---|
| 2020–2021 | obstacle avoidance; navigation; avoidance; guidance; mission planning; motion; tracking; optimal control; performance; localization; tracking |
| 2021–2022 | optimization; system; genetic algorithm; coverage; coverage path planning; collision; vehicles; collision-avoidance; trajectory generation; multi-objective optimization; differential evolution; model predictive control; surveillance; robots; exploration; area coverage; generation; simulation |
| 2022–2023 | particle swarm optimization; swarm; information; UAV communication; placement; interference; trajectory; throughput; 5G; security; robust; batteries; physical layer security; management; relays; energy; networks; wireless; wireless communication; power; deployment |
| 2023–2024 | deep learning; reinforcement learning; mobile edge computing (MEC); costs; data-collection; IoT; NOMA; servers; safety; transmission; energy-efficient; energy consumption; task offloading; things; inspection; resource-allocation; internet |
| R | References | Technique | Problem/Methodology Characteristics | Application |
|---|---|---|---|---|
| 1 | [62] 2023 | MARL + CTDE | MARL approach is scalable and real-time; Centralized training and decentralized execution (CTDE); Negative and positive reinforcement is employed in the reward function. | UAV cluster collaboration missions |
| 2 | [219] 2024 | BACOHBA + HBAFOA | Three-dimensional inspection environment model; Multi-indicator hybrid cost function; Has better performance in terms of fast-solving ability, solution accuracy and optimization stability. | Inspection of transmission lines |
| 3 | [176] 2024 | UAV-DPPA-DWA | Dynamic-based path; Algorithm combined with dynamic window approach; The novel elliptic tangent graph algorithm based on the evaluation of offset degree and obstacle distance; Various types of complex dynamic obstacle avoidance scenarios. | Obstacle avoidance |
| 4 | [220] 2022 | DETACH + STEER | Large drone tasks are divided into smaller ones; Considering the maximum waypoint coverage; Offline path-planning algorithms detect possible in-flight collisions; DETACH and STEER perform vector intersection checks for flight path analysis. | Obstacle avoidance |
| 5 | [221] 2023 | HGWODE | GWO and DE algorithms cooperate to balance exploitation and exploration; The position-updated equation of GWO to boost exploitation; A rank-based mutation strategy is implemented in DE algorithm to promote exploitation capacity. | Algorithmic improvements |
| 6 | [222] 2023 | HISOS-SCPSO | Employing chaotic logistic mapping; Difference strategy; Novel attenuation functions; The population regeneration strategy; Cubic B-spline curve. | Algorithmic improvements |
| 7 | [223] 2023 | VPF-RRT* + DRNN-PI | Traditional planned paths are not smooth, the distance is long, and the fault tolerance rate of the planned path is low; Environmental disturbance and maintaining track along the planning path. | Navigation to reduce environmental interference |
| 8 | [224] 2023 | BA + CNN + BOFBA | Cooperation of obstacle avoidance and target tracking; All perception information, including avoidance and tracking, was fused during the UAV motion decision phase; The Hawk-eye algorithm with LOS tracking rules. | Algorithmic improvements |
| 9 | [194] 2023 | MILP + B&P + BLA + TS | Two-echelon network; A mixed integer linear programming model; Several constraints such as customers’ delivery deadlines and drones’ energy capacity; The exact labeling algorithm is utilized. | The two-level vehicle path problem |
| 10 | [134] 2023 | DPC + LiDAR | Covering the creation of digital twins; Laser scanners as light emitters; Point clouds are aligned using georeferenced points measured with a total station; Dense point clouds from a laser scanner are used to generate meshes. | Identify architectural and archaeological heritage |
| 11 | [225] 2024 | DLS + USS + IUS + AIS | The industrial source complex (ISC3) model; Determining sampling points (SPs) to collect data; Building the shortest path to visit chimneys; Visiting downwind (DW) SPs first and then flying down to pass upwind (UW) SPs. | Recognize chimneys with excessive exhaust emissions |
| 12 | [135] 2022 | SfM + MVS | Based on the combination of SfM-MVS and UAV-generated images; Utilizing image acquisition technologies and 3D model-building software. | 3D reconstruction |
| 13 | [226] 2022 | SA + ABC | Given battery capacity constraints; Using a ship (such as a patrol ship) as a UAV mobile supply base; Overcoming battery limitations and increasing monitoring coverage; Solving joint routing and scheduling problems of ship-deployed multiple UAVs (SDMUs). | Vessel air pollution detection |
| 14 | [193] 2023 | GA | Heterogeneous UAVs applied to solving the issues of coverage; Multi heterogenic UAVs coverage path planning with moving ground platform (mhCPPmp); Allowing solving the task of covering fields of different shapes; Lower flight costs. | Precision agriculture |
| 15 | [227] 2023 | DTU + TSI + RE | NP-hard problem; Integrated truck-UAV collaborative scheduling model; The time for making decisions is tight; Frequently threatened by the disruption of road networks and infrastructures. | Urban emergency response |
| 16 | [228] 2023 | Dijkstra + SURF + RANSAC | Based on the needs of continuous road image capture and pavement disease recognition; Automatic route planning and control; Continuous photography control; Image stitching and smoothing tasks. | Road damage detection |
| 17 | [229] 2023 | FTA + BN | Hybrid risk identification model; Fault tree structure of UAV-related public safety accidents; Given initial risk factors; The fault tree is converted into a BN; Diagnostic inference and sensitivity analysis are applied to identify key risk factors. | Risk identification |
| 18 | [230] 2023 | SICq + RPA | Forming a communication relay chain between the target and the base station as fast as possible; Balancing detection and connection requirements; Utilizing joint optimization for the search drones and decoupled optimization for the relay drones. | Search and rescue missions |
| 19 | [231] 2023 | APF-IRRT* | High computational efficiency; Adapted with adaptive step size; Adaptive search range; Giving the target directivity of the extended nodes. | Search and rescue missions |
| 20 | [232] 2023 | RL | Limited amount of power at their disposal; UAV-based autonomous mine detection framework; Based on deep learning and then constructing the coverage route plan for the aerial survey; Multiple coverage path patterns are used to identify the ideal UAV route. | Intelligent landmine detection |
| 21 | [140] 2024 | MEC + SA + AGSP | Supporting cloud-like computing capabilities at the edge of the network; Offering low-latency services; Integrated cloud edge network with multiple mobile users (MUs) and layered drones; Static and dynamic applications supporting task offloading. | Cost-efficient task offloading |
| 22 | [233] 2022 | SCA + BCD | Extremely high sensing resolution, large coverage area; No additional spectrum required; Minimizing propulsion energy and guaranteeing the required sensing resolutions on a series of interesting landmarks; Better energy efficiency. | Communication-assisted radar sensing |
| 23 | [234] 2023 | DMSPSO + CLPSO | Cooperative path planning model; Given communication constraints and the impact of obstacles in the flight environment on the quality of communication. | Path planning with communication constraints |
| 24 | [235] 2024 | PPO | Balancing mission objectives with the imperative to minimize radar exposure; Reducing the cognitive burden of air traffic controllers; Action-shaping mechanism; Operational viability in congested radar environments. | Realizing minimized radar observability |
| 25 | [236] 2022 | DRL + QiER | Associated with the associated quantum bit (qubit); Minimization problem on the weighted sum of time cost and expected outage duration; UAV’s adjustable mobility; Applying Grover iteration-based amplitude amplification technique. | Cellular-connected UAV network |
| 26 | [237] 2022 | COS + AB-3DULA | Antenna array; Three-dimensional (3D) uniform linear array (ULA); Nonlinear EH model; Efficiency maximization problem; Complicated 3D ULA antenna pattern; Different beamforming preferences. | UAV-enabled wireless power transfer |
| 27 | [238] 2023 | DRL + SAC | Multi-UAVs as mobile aerial ISAC platforms; Joint user association, UAV trajectory planning, and power allocation problem; Equivalent transformation of the optimization objective based on the symmetric group; Random and adaptive data augmentation schemes. | Resource allocation in UAV network |
| 28 | [239] 2022 | MILP + HGSA + UO-MinMin + MC-SA | Joint-optimization framework; GA employs a novel stochastic crossover operator to search for the optimal global position of customers; SA utilizes local search operators to avoid the local optima. | Routing and scheduling optimization |
| 29 | [240] 2023 | Voronoi diagram + A* + DBSCAN | Constructing a city airspace grid model in which the characteristics of the airspace are mapped onto the grid map; Obstacle clustering algorithm; Based on DBSCAN to generate representative obstacle points as the Voronoi seed nodes. | Drone public route network planning |
| 30 | [241] 2022 | Saturated FM2 + VCG | UTM models; Resolving path conflicts from different perspectives; Sequential delay (SD) model; Sequential delay/reroute (SDR) model; Full optimization (FO) model; Batch optimization (BO) model. | Traffic management and resource allocation in low-altitude logistics |
| 31 | [242] 2023 | NLO | Centralized supply chain network optimization model; Maximizes the total profit; Including realistic features such as low battery capacities and short delivery ranges; The constrained nonlinear optimization problem is formulated as a variational inequality. | Last mile package delivery |
| 32 | [243] 2022 | MILP + SA + VNS | A mixed integer linear programming model; Assignment of each customer location to a vehicle; Routing of truck and UAVs; Scheduling drone LARO and truck operator activities at each stop. | Last mile package delivery |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Su, Y.; Tan, W.; Zhan, R.; Liu, J.; Jiang, L. UAV Path Planning Trends from 2000 to 2024: A Bibliometric Analysis and Visualization. Drones 2025, 9, 128. https://doi.org/10.3390/drones9020128
Wu Q, Su Y, Tan W, Zhan R, Liu J, Jiang L. UAV Path Planning Trends from 2000 to 2024: A Bibliometric Analysis and Visualization. Drones. 2025; 9(2):128. https://doi.org/10.3390/drones9020128
Chicago/Turabian StyleWu, Qiwu, Yunchen Su, Weicong Tan, Renjun Zhan, Jiaqi Liu, and Lingzhi Jiang. 2025. "UAV Path Planning Trends from 2000 to 2024: A Bibliometric Analysis and Visualization" Drones 9, no. 2: 128. https://doi.org/10.3390/drones9020128
APA StyleWu, Q., Su, Y., Tan, W., Zhan, R., Liu, J., & Jiang, L. (2025). UAV Path Planning Trends from 2000 to 2024: A Bibliometric Analysis and Visualization. Drones, 9(2), 128. https://doi.org/10.3390/drones9020128