


Influence of Ground Control Point Placement and Surrounding Environment on Unmanned Aerial Vehicle-Based Structure-from-Motion Forest Resource Estimation


Abstract
:1. Introduction
2. Materials and Methods
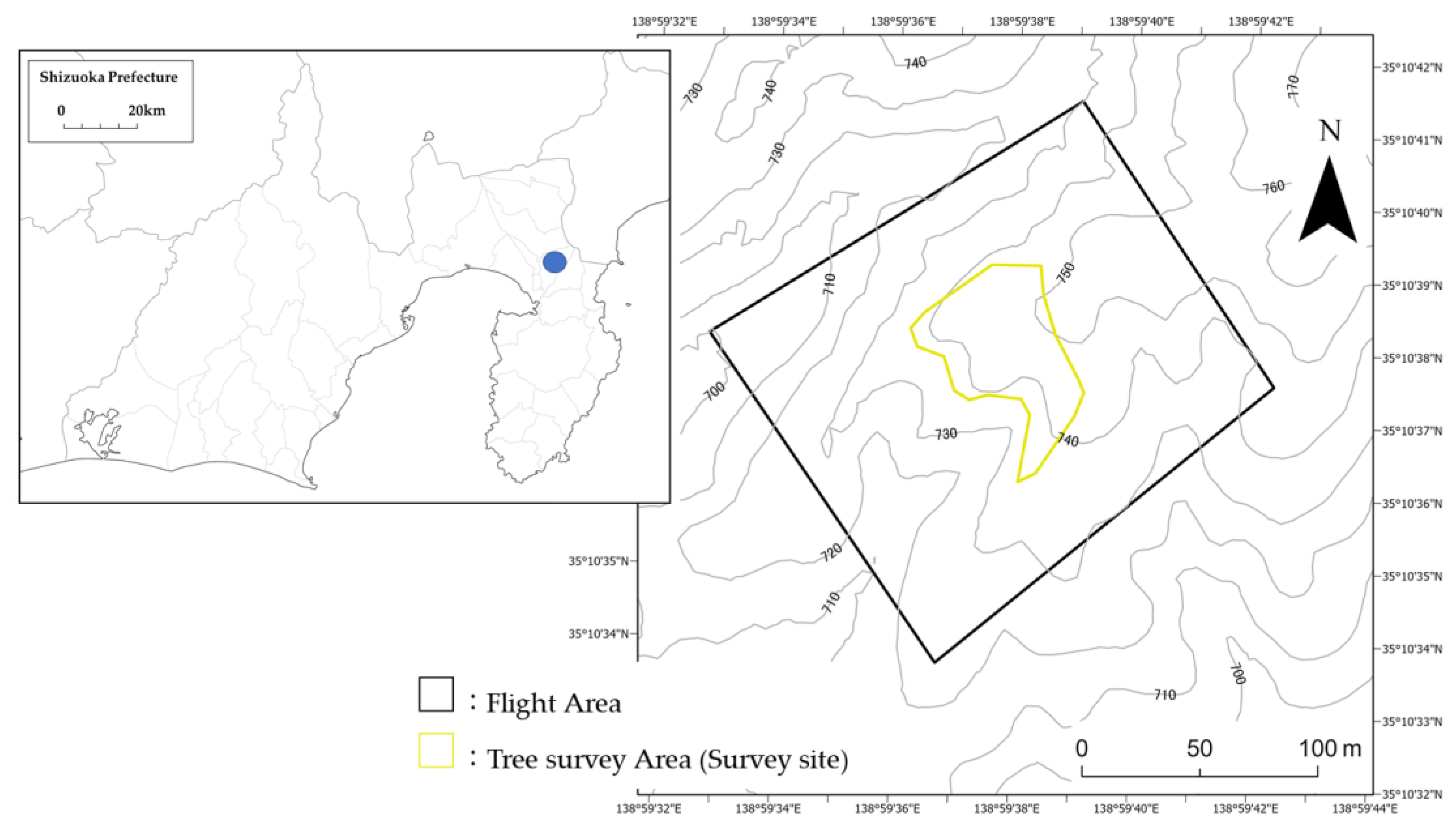
2.1. Survey Site
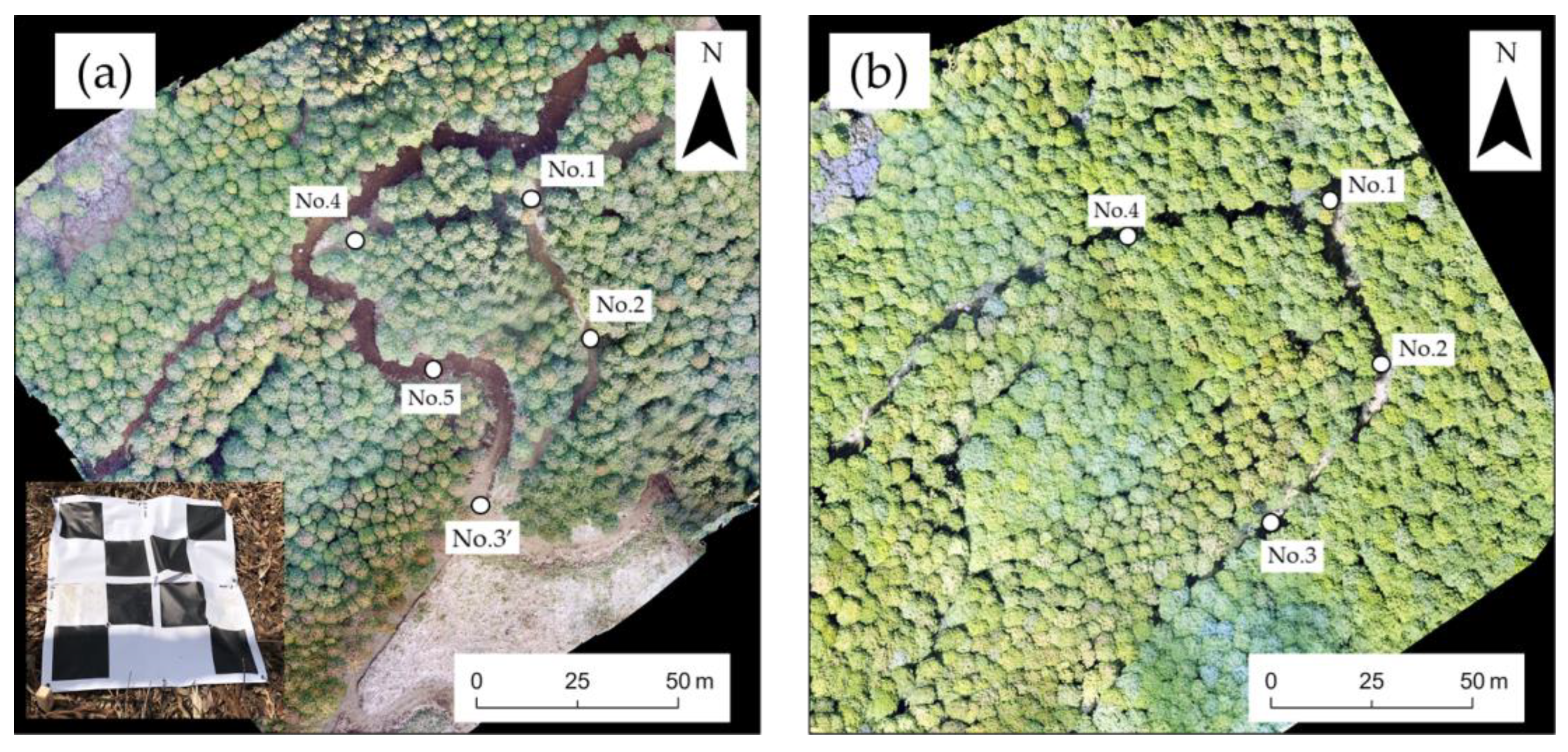
2.2. Aerial Image Capture Using an UAV
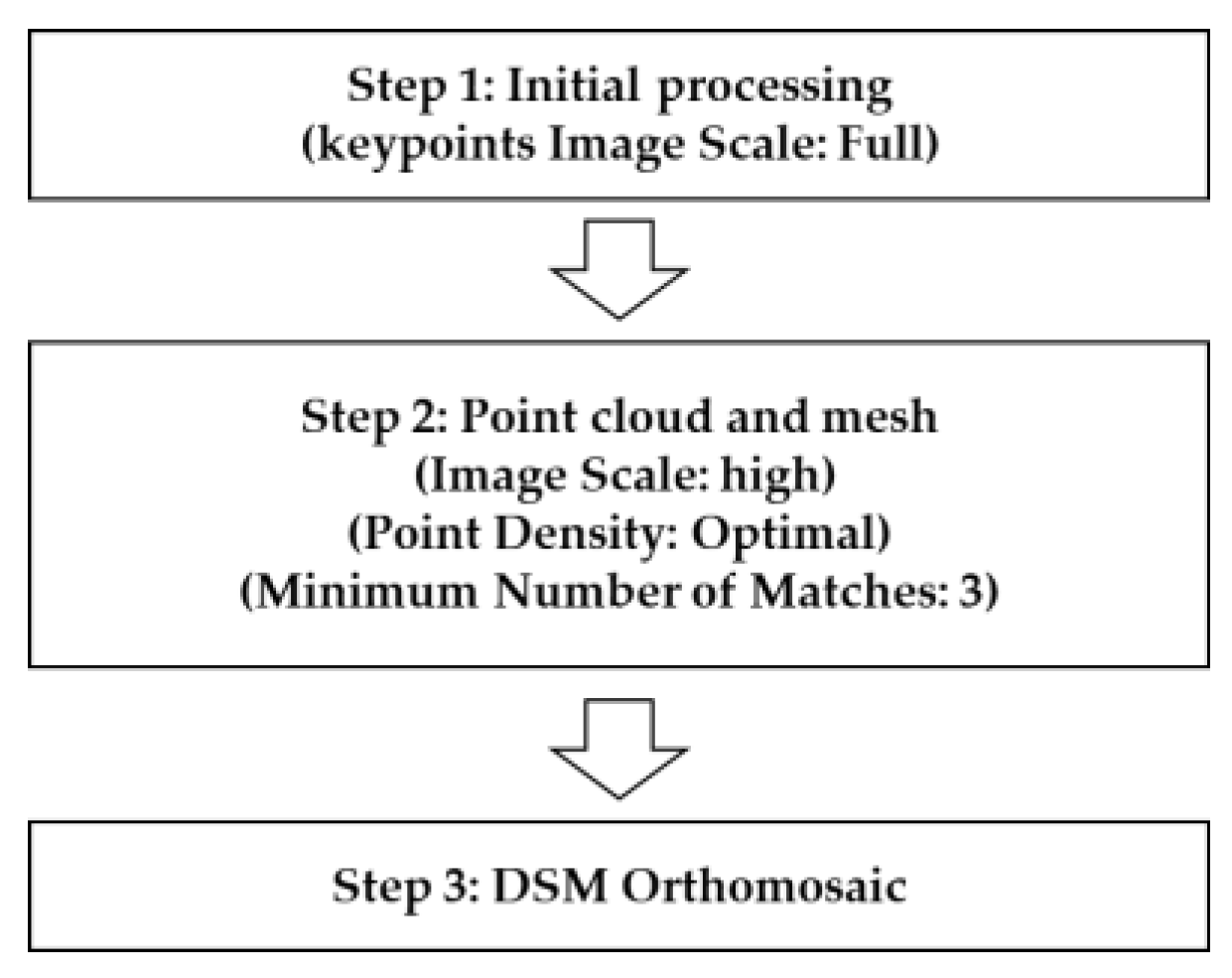
2.3. SfM Processing of Aerial Images and Estimation Method for Forest Resources
2.4. Accuracy of the Estimated Values
3. Results
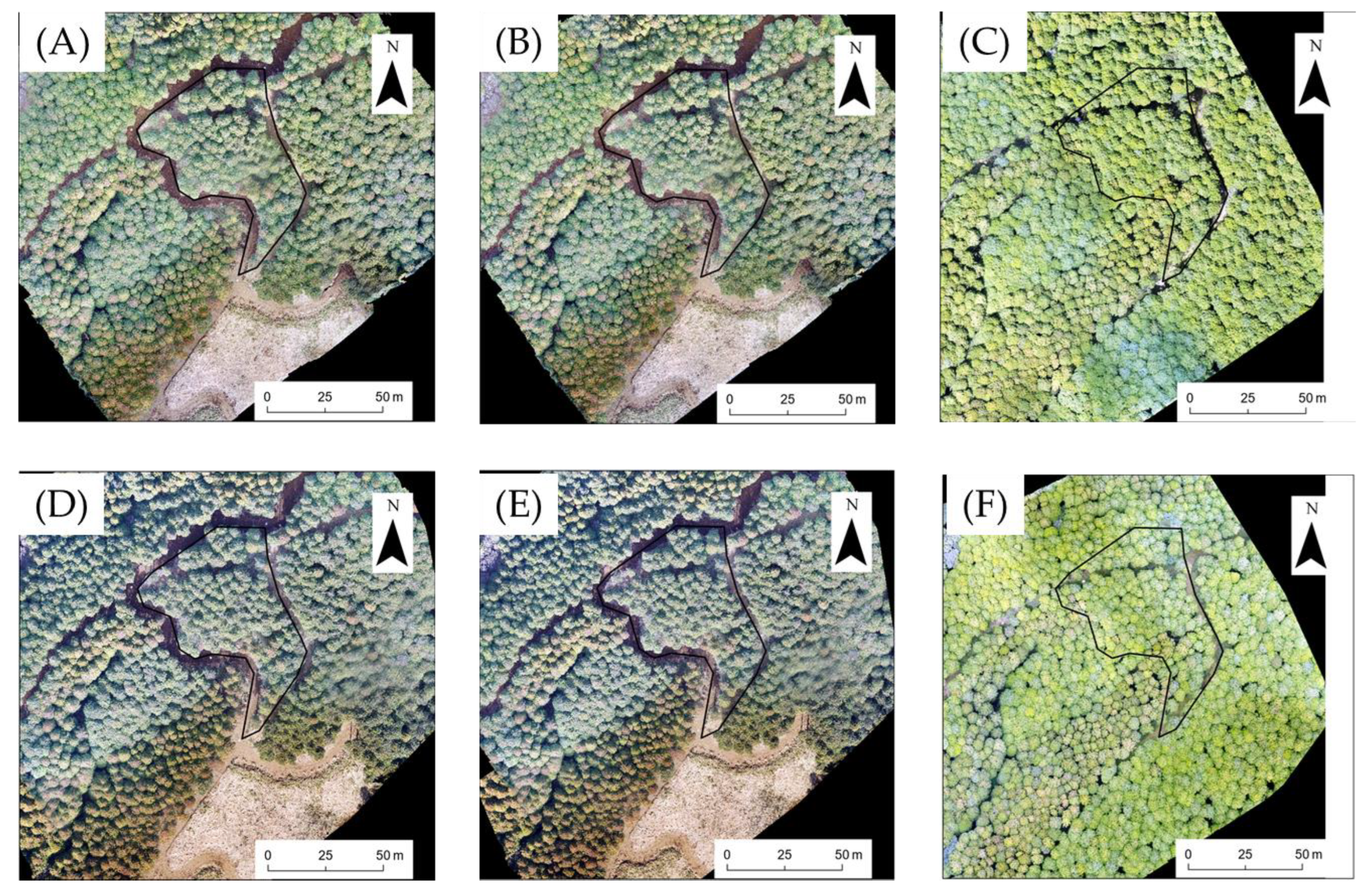
3.1. SfM Processing of Aerial Images
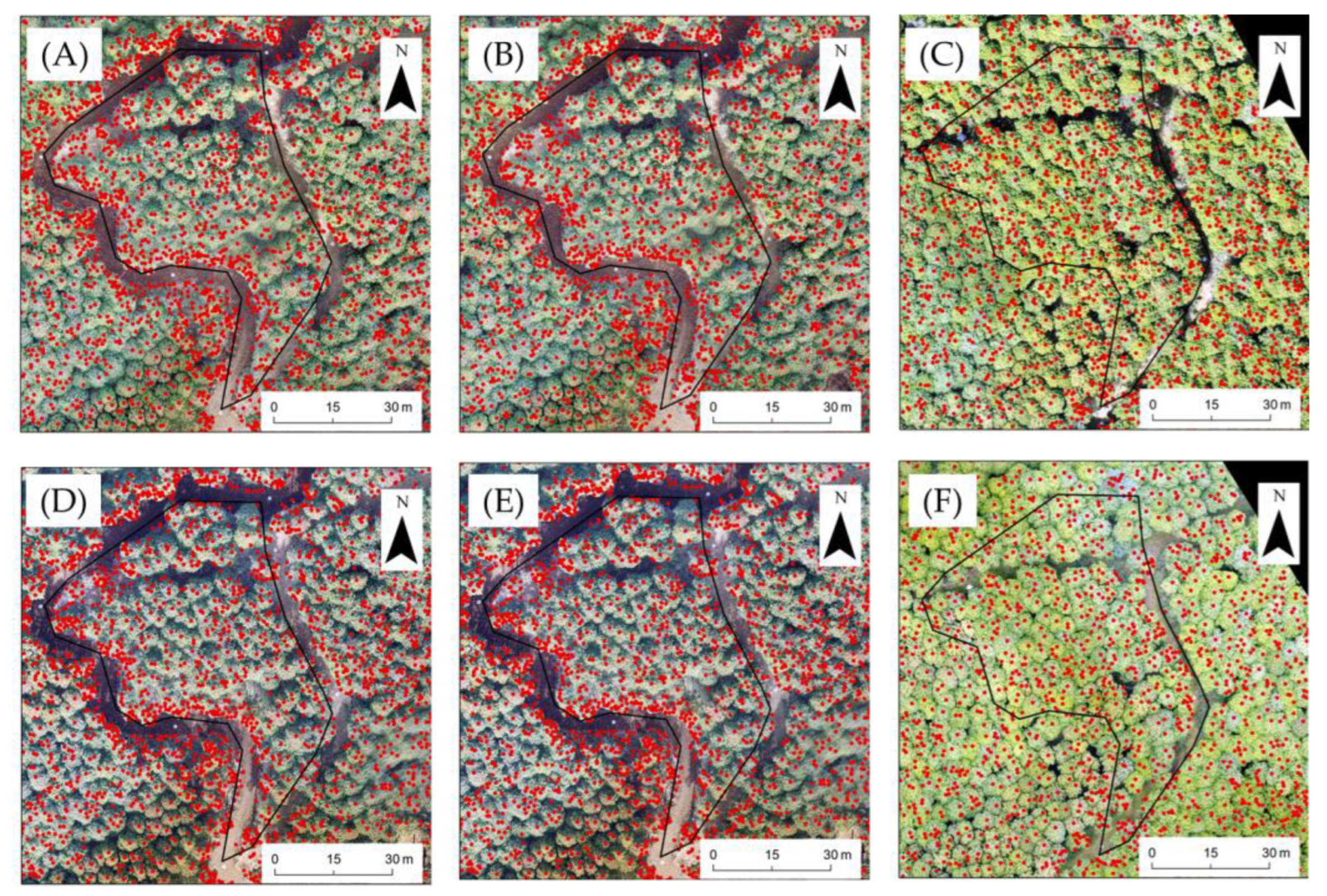
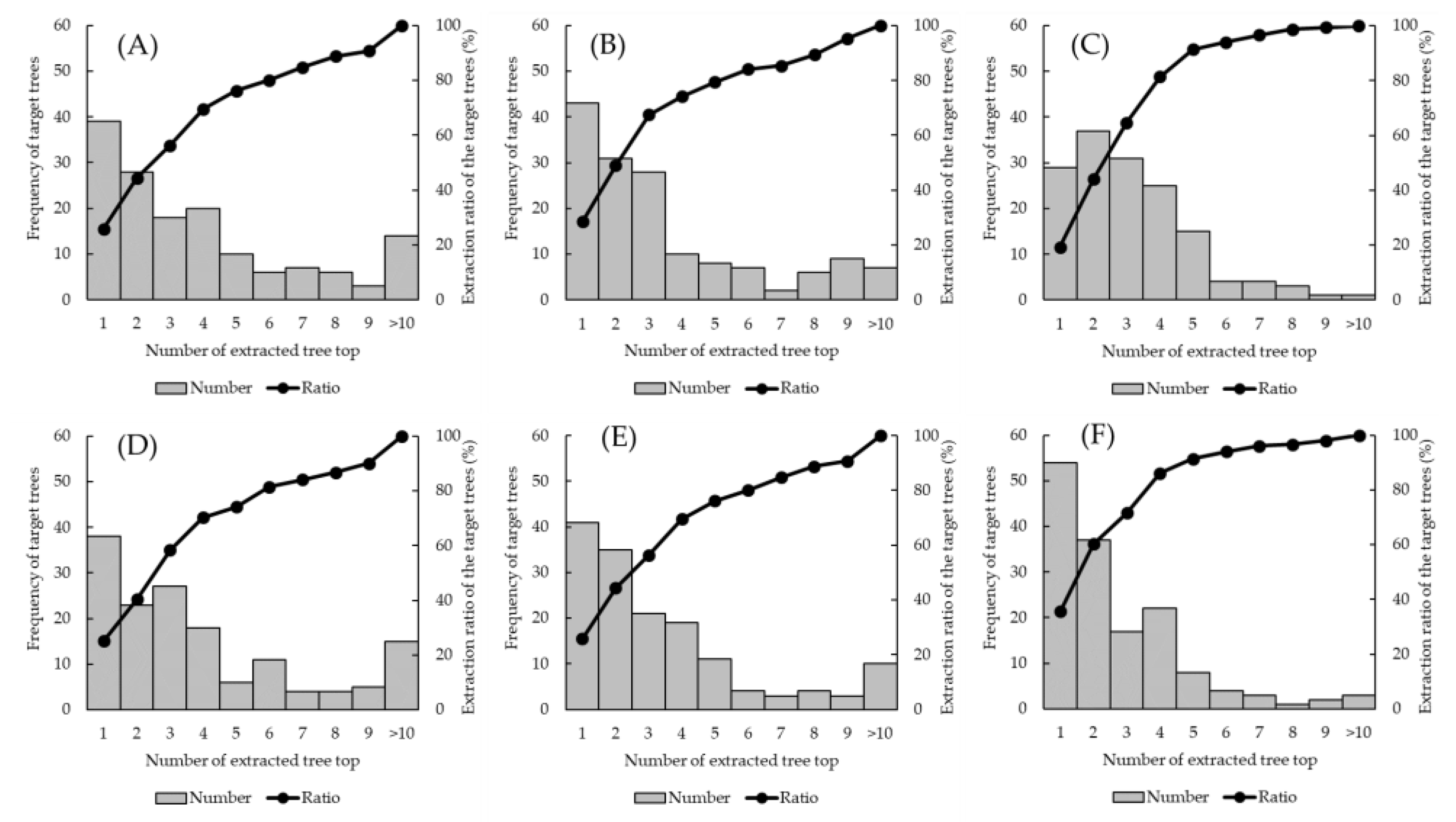
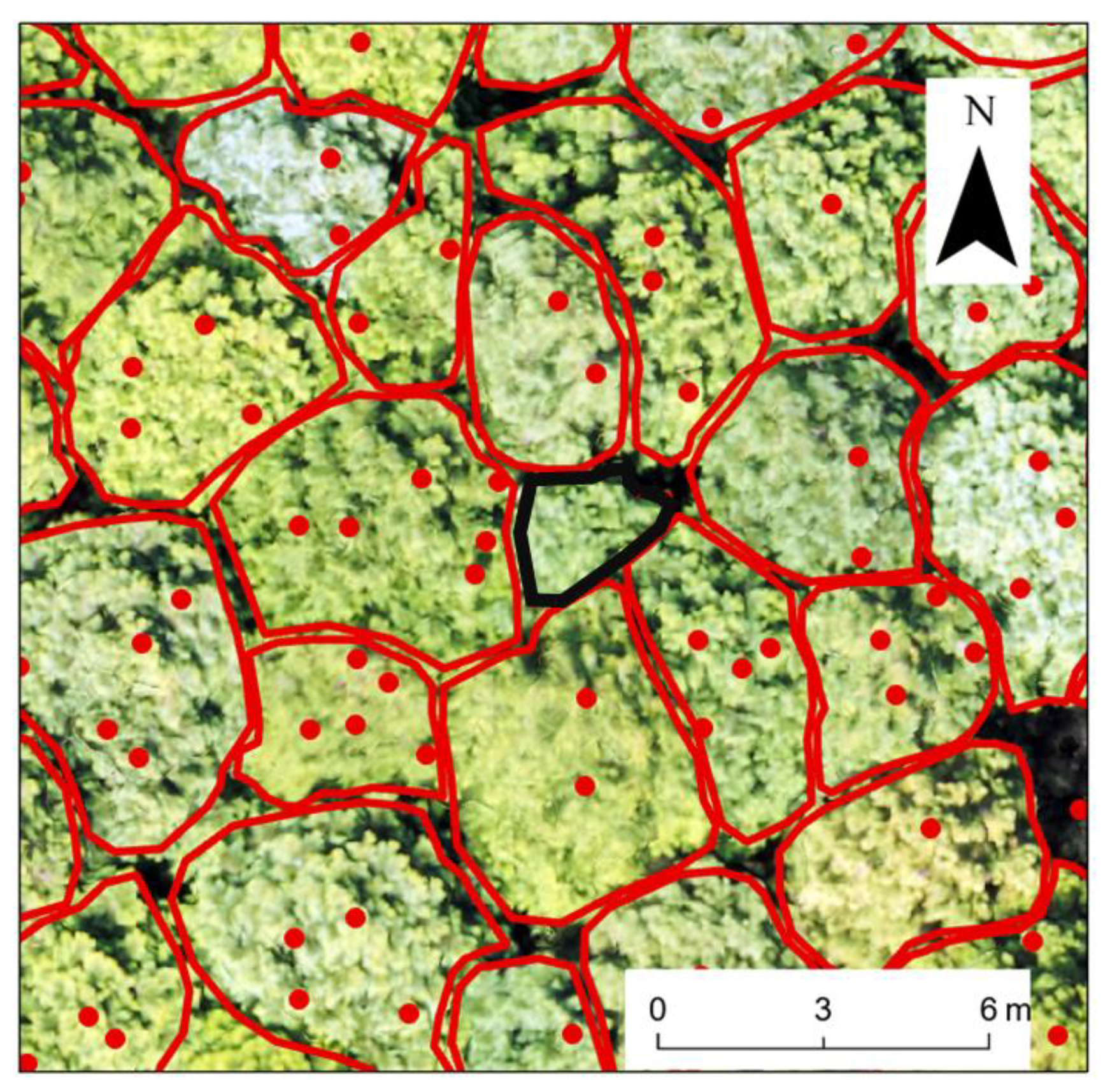
3.2. Extraction Target Trees
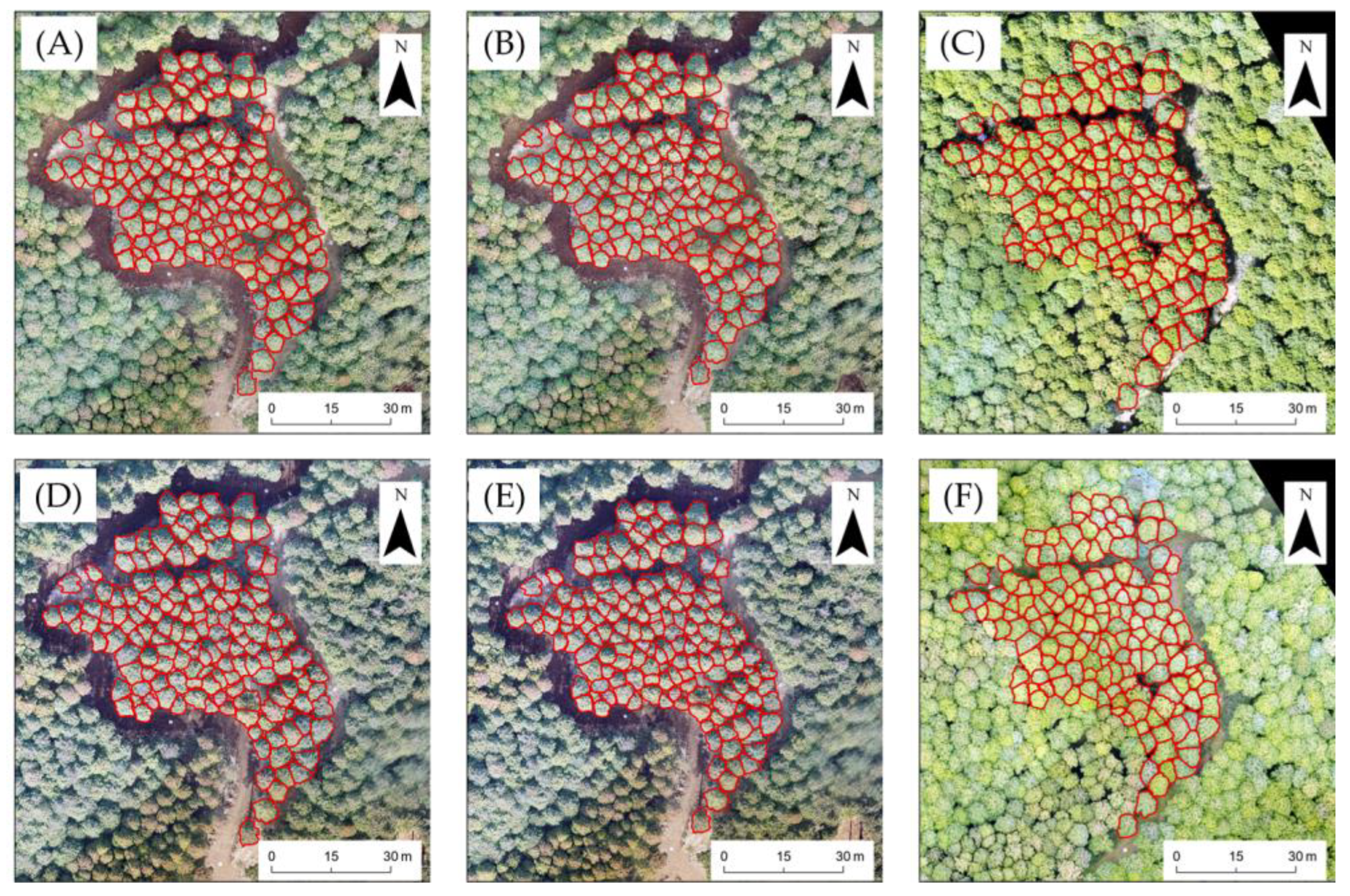
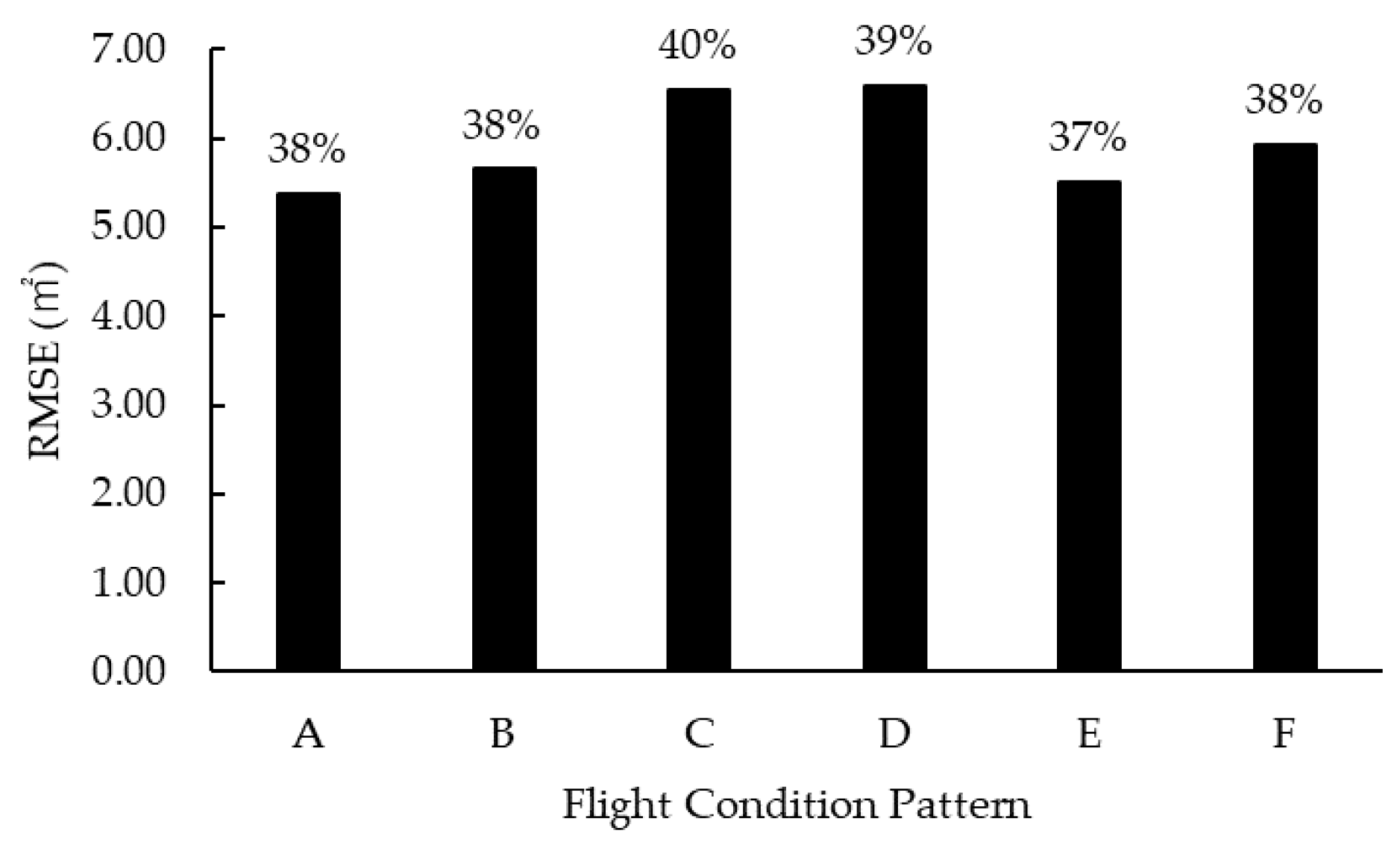
3.3. Estimated Crown Area
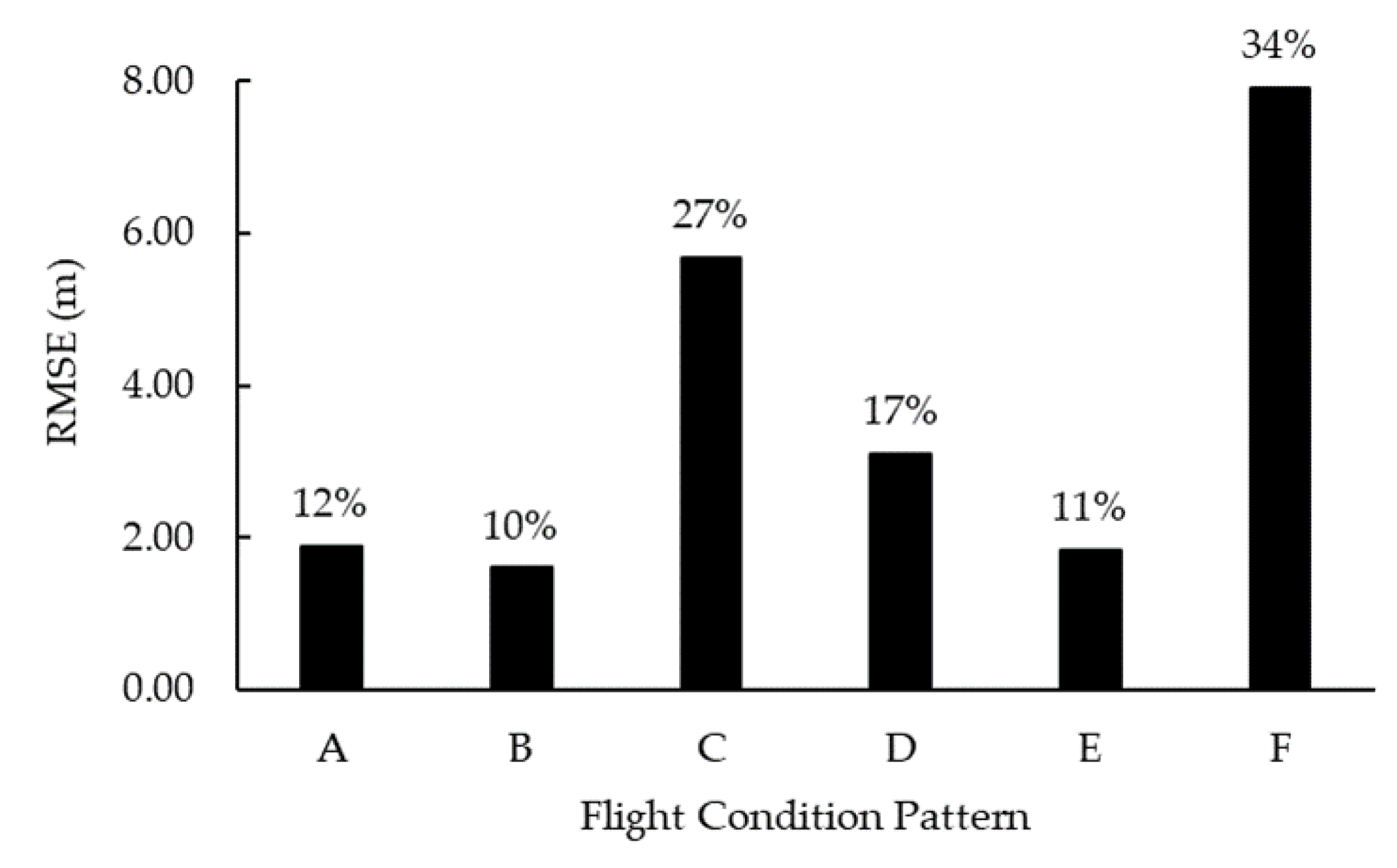
3.4. Estimated Tree Height
4. Discussion
5. Conclusions
- The effect of GCPs on SfM image processing and tree count or tree crown area estimations was minimal.
- Increasing the number of GCPs and ensuring an open surrounding environment improved the accuracy of tree height estimation.
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ANOVA | one-way analysis of variance |
| DCHM | digital canopy height model |
| DSM | digital surface model |
| DTM | digital terrain model |
| GCP | ground control point |
| GNSS | global navigation satellite system |
| GSD | ground sampling distance |
| LiDAR | light detection and ranging |
| Pix4D | Pix4D mapper |
| RMSE | root mean square error |
| rRMSE | relative root mean square error |
| RTK | real-time kinematic |
| SfM | structure from motion |
| UAV | unmanned aerial vehicle |
References
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry remote sensing from unmanned aerial vehicles: A review focusing on the data, processing and potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef]
- Tong, H.; Yuan, J.; Zhang, J.; Wang, H.; Li, T. Real-time wildfire monitoring using low-altitude remote sensing imagery. Remote Sens. 2024, 16, 2827. [Google Scholar] [CrossRef]
- Kanaskie, C.R.; Routhier, M.R.; Fraser, B.T.; Congalton, R.G.; Ayres, M.P.; Garnas, J.R. Early detection of southern pine beetle attack by UAV-collected multispectral imagery. Remote Sens. 2024, 16, 2608. [Google Scholar] [CrossRef]
- Taki, S.; Nakazawa, M.; Akamatsu, H. Interpretation of forestry work road networks by using small fixed-wing UAV. J. Jpn. For. Eng. Soc. 2020, 35, 147–151. [Google Scholar] [CrossRef]
- Taki, S.; Takata, K.; Inakawa, K. Interpretation of forestry work road networks by a small, unmanned multicopter. Jpn. J. For. Plann. 2016, 50, 41–49. [Google Scholar] [CrossRef]
- Li, T.; Lin, J.; Wu, W.; Jiang, R. Effects of illumination conditions on individual tree height extraction using UAV LiDAR: Pilot study of a planted coniferous stand. Forests 2024, 15, 758. [Google Scholar] [CrossRef]
- Zhou, X.; Ma, K.; Sun, H.; Li, C.; Wang, Y. Estimation of forest stand volume in coniferous plantation from individual tree segmentation aspect using UAV-LiDAR. Remote Sens. 2024, 16, 2736. [Google Scholar] [CrossRef]
- Taki, S.; Aoki, M.; Koujimaru, M.; Inada, J. Aerial photography for in-forest using an artificial intelligence-enabled drone, and the construction of an in-forest three-dimensional model. J. Jpn. For. Eng. Soc. 2021, 36, 151–160. [Google Scholar] [CrossRef]
- Htun, N.M.; Owari, T.; Tsuyuki, S.; Hiroshima, T. Detecting canopy gaps in uneven-aged mixed forests through the combined use of unmanned aerial vehicle imagery and deep learning. Drones 2024, 8, 484. [Google Scholar] [CrossRef]
- Huang, Y.; Ou, B.; Meng, K.; Yang, B.; Carpenter, J.; Jung, J.; Fei, S. Tree species classification from UAV canopy images with deep learning models. Remote Sens. 2024, 16, 3836. [Google Scholar] [CrossRef]
- Silva, B.R.F.d.; Ucella-Filho, J.G.M.; Bispo, P.d.C.; Elera-Gonzales, D.G.; Silva, E.A.; Ferreira, R.L.C. Using drones for dendrometric estimations in forests: A bibliometric analysis. Forests 2024, 15, 1993. [Google Scholar] [CrossRef]
- Kameyama, S.; Sugiura, K. Estimating tree height and volume using unmanned aerial vehicle photography and SfM technology, with verification of result accuracy. Drones 2020, 4, 19. [Google Scholar] [CrossRef]
- Kameyama, S. Verification of measurement accuracy on forest information and work efficiency in UAV-SfM by double grid flight. Kanto J. For. Res. 2024, 75, 89–92. [Google Scholar]
- Kameyama, S.; Sugiura, K. Effects of differences in structure from motion software on image processing of unmanned aerial vehicle photography and estimation of crown area and tree height in forest. Remote Sens. 2021, 13, 626. [Google Scholar] [CrossRef]
- Forestry Agency. UAV Timber Cruise Manual. Available online: https://www.rinya.maff.go.jp/j/gyoumu/gijutu/attach/pdf/syuukaku_kourituka-2.pdf (accessed on 15 February 2025). (In Japanese).
- Forestry Agency. UAV Photogrammetry Manual. Available online: https://www.rinya.maff.go.jp/j/sekou/gijutu/attach/pdf/ICT_seko-49.pdf (accessed on 15 February 2025). (In Japanese).
- Akita Prefecture. Manual for Forest Resource Survey Using Photos Taken by Drones. Available online: https://www.pref.akita.lg.jp/pages/archive/80172 (accessed on 15 February 2025). (In Japanese).
- Shizuoka Prefecture. Forest Resource Measurement Using Drones. Available online: https://www.pref.shizuoka.jp/_res/projects/default_project/_page_/001/054/615/670.pdf (accessed on 15 February 2025). (In Japanese).
- Geospatial Information Authority of Japan. Fundamental Geospatial Data. Available online: https://fgd.gsi.go.jp/download/menu.php (accessed on 15 February 2025). (In Japanese).
- Kalacska, M.; Lucanus, O.; Arroyo-Mora, J.P.; Laliberté, É.; Elmer, K.; Leblanc, G.; Groves, A. Accuracy of 3D landscape reconstruction without ground control points using different UAS platforms. Drones 2020, 4, 13. [Google Scholar] [CrossRef]
- Seo, D.-M.; Woo, H.-J.; Hong, W.-H.; Seo, H.; Na, W.-J. Optimization of number of GCPs and placement strategy for UAV-based orthophoto production. Appl. Sci. 2024, 14, 3163. [Google Scholar] [CrossRef]
- Zhang, K.; Okazawa, H.; Hayashi, K.; Hayashi, T.; Fiwa, L.; Maskey, S. Optimization of ground control point distribution for unmanned aerial vehicle photogrammetry for inaccessible fields. Sustainability 2022, 14, 9505. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Atik, M.E.; Arkali, M. Comparative assessment of the effect of positioning techniques and ground control point distribution models on the accuracy of UAV-based photogrammetric production. Drones 2025, 9, 15. [Google Scholar] [CrossRef]
- Yu, J.J.; Kim, D.W.; Lee, E.J.; Son, S.W. Determining the optimal number of ground control points for varying study sites through accuracy evaluation of unmanned aerial system-based 3D point clouds and digital surface models. Drones 2020, 4, 49. [Google Scholar] [CrossRef]
- Lalak, M.; Wierzbicki, D.; Kędzierski, M. Methodology of processing single-strip blocks of imagery with reduction and optimization number of ground control points in UAV photogrammetry. Remote Sens. 2020, 12, 3336. [Google Scholar] [CrossRef]
- Ferrer-González, E.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. UAV photogrammetry accuracy assessment for corridor mapping based on the number and distribution of ground control points. Remote Sens. 2020, 12, 2447. [Google Scholar] [CrossRef]
- Koshimizu, K.; Kawakami, G.; Ebina, M.; Ishimaru, S.; Urabe, A. Effective GCP layout on UAV-SfM survey for steep cliffs. Trans. Jpn. Geomorphol. Union 2020, 41, 1–13. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Zhong, H.; Duan, Y.; Tao, P.; Zhang, Z. Influence of ground control point reliability and distribution on UAV photogrammetric 3D mapping accuracy. Geo-spatial Inf. Sci. 2025. ahead-of-print. [Google Scholar] [CrossRef]
- Ulvi, A. The effect of the distribution and numbers of ground control points on the precision of producing orthophoto maps with an unmanned aerial vehicle. J. Asian Archit. Build. Eng. 2021, 20, 806–817. [Google Scholar] [CrossRef]
- Liu, X.; Lian, X.; Yang, W.; Wang, F.; Han, Y.; Zhang, Y. Accuracy assessment of a UAV direct georeferencing method and impact of the configuration of ground control points. Drones 2022, 6, 30. [Google Scholar] [CrossRef]
- Nwilag, B.D.; Eyoh, A.E.; Ndehedehe, C.E. Digital topographic mapping and modelling using low altitude unmanned aerial vehicle. Model. Earth Syst. Environ. 2023, 9, 1463–1476. [Google Scholar] [CrossRef]
- Casella, V.; Chiabrando, F.; Franzini, M.; Manzino, A.M. Accuracy assessment of a UAV block by different software packages, processing schemes and validation strategies. ISPRS Int. J. Geo-Inf. 2020, 9, 164. [Google Scholar] [CrossRef]
- Park, J.W.; Yeom, D.J. Method for establishing ground control points to realize UAV-based precision digital maps of earthwork sites. J. Asian Archit. Build. Eng. 2022, 21, 110–119. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.-J.; García-Ferrer, A.; Pérez-Porras, F.-J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Luppichini, M.; Paterni, M.; Berton, A.; Casarosa, N.; Bini, M. Influences of the ground control point (GCP) configuration on the UAV-derived Structure from Motion (SfM) in the coastal environment. Earth Sci. Inform. 2015, 18, 144. [Google Scholar] [CrossRef]
- Dharshan Shylesh, D.S.; Nagarathinam, M.; Sivasankar, S.; Surendran, D.; Jaganathan, R.; Mohan, G. Influence of quantity, quality, horizontal and vertical distribution of ground control points on the positional accuracy of UAV survey. Appl. Geomat. 2023, 15, 897–917. [Google Scholar] [CrossRef]
- Sohl, M.A.; Mahmood, S.A. Low-cost UAV in photogrammetric engineering and remote sensing: Georeferencing, DEM accuracy, and geospatial analysis. J. Geovis. Spat. Anal. 2024, 8, 14. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Meas. J. Int. Meas. Confed. 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Đuka, A.; Tomljanović, K.; Franjević, M.; Janeš, D.; Žarković, I.; Papa, I. Application and accuracy of unmanned aerial survey imagery after salvage logging in different terrain conditions. Forests 2022, 13, 2054. [Google Scholar] [CrossRef]
- Stöcker, C.; Nex, F.; Koeva, M.; Gerke, M. High-quality UAV-based orthophotos for cadastral mapping: Guidance for optimal flight configurations. Remote Sens. 2020, 12, 3625. [Google Scholar] [CrossRef]
- Ogawa, M.; Ota, T.; Mizoue, N.; Yoshida, S. Evaluation of positional accuracy using unmanned aerial vehicle with structure from motion approach. Kyushu J. For. Res. 2017, 70, 145–147. [Google Scholar]
- Ogura, T.; Aoki, S. Verification of operational optimization in acquiring high-definition topographic data using UAV and SfM-MVS. Trans. Jpn. Geomorphol. Union 2016, 37, 399–411. [Google Scholar]
- Yamate, N.; Hasegawa, H.; Kojimaru, M. Comparison of accuracy of tree height and position focusing on differences in position determination method in UAV measurement. J. Jpn. Soc. Photogramm. Remote Sens. 2020, 59, 112–124. [Google Scholar]
- Han, Y.G.; Jung, S.H.; Kwon, O. How to utilize vegetation survey using drone image and image analysis software. J. Ecol. Environ. 2017, 41, 18. [Google Scholar] [CrossRef]
- Meinen, B.U.; Robinson, D.T. Mapping erosion and deposition in an agricultural landscape: Optimization of UAV image acquisition schemes for SfM-MVS. Remote Sens. Environ. 2020, 239, 111666. [Google Scholar] [CrossRef]
- Yoshimura, M.; Fujisawa, R.; Akiyama, Y. Examination of angle for photography and ground control point configurations to reduce distortion of UAV-SfM images for experimental field modeling. J. NARO Res. Dev. 2023, 14, 1–7. [Google Scholar] [CrossRef]
- Kong, L.; Chen, T.; Kang, T.; Chen, Q.; Zhang, D. An automatic and accurate method for marking ground control points in unmanned aerial vehicle photogrammetry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 16, 278–290. [Google Scholar]
- Pix4D. Offline Getting Started and Manual (pdf)—PIX4Dmapper. Available online: https://support.pix4d.com/hc/en-us/articles/204272989 (accessed on 5 February 2025).
- Agisoft. Agisoft Metashape User Manual Professional Edition, Version 2.2. Available online: https://www.agisoft.com/pdf/metashape-pro_2_2_en.pdf (accessed on 5 February 2025).
- Zeybek, M.; Taşkaya, S.; Elkhrachy, I.; Tarolli, P. Improving the spatial accuracy of UAV platforms using direct georeferencing methods: An application for steep slopes. Remote Sens. 2023, 15, 2700. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the georeferencing accuracy of a photogrammetric model using a quadrocopter with onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar] [CrossRef] [PubMed]
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry using UAV-mounted GNSS RTK: Georeferencing strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Stott, E.; Williams, R.D.; Hoey, T.B. Ground control point distribution for accurate kilometre-scale topographic mapping using an RTK-GNSS unmanned aerial vehicle and SfM photogrammetry. Drones 2020, 4, 55. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK method—An optimal solution for mapping inaccessible forested areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef]
- Pourreza, M.; Moradi, F.; Khosravi, M.; Deljouei, A.; Vanderhoof, M.K. GCPs-free photogrammetry for estimating tree height and crown diameter in Arizona cypress plantation using UAV-mounted GNSS RTK. Forests 2022, 13, 1905. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Brown, O.W.; Walker, J.; Barchyn, T.E.; Nesbit, P.R.; Kucharczyk, M.; Myshak, S. Spatial accuracy of UAV-derived orthoimagery and topography: Comparing photogrammetric models processed with direct geo-referencing and ground control points. Geomatica 2016, 70, 21–30. [Google Scholar] [CrossRef]
- Teppati Losè, L.; Chiabrando, F.; Giulio Tonolo, F. Boosting the timeliness of UAV large scale mapping. Direct georeferencing approaches: Operational strategies and best practices. ISPRS Int. J. Geo-Inf. 2020, 9, 578. [Google Scholar] [CrossRef]
- Geospatial Information Authority of Japan. GSI Maps. Available online: https://maps.gsi.go.jp/ (accessed on 15 February 2025). (In Japanese).
- Nagoya City. Calculation Method for Greening Area. Available online: https://www.city.nagoya.jp/ryokuseidoboku/cmsfiles/contents/0000010/10356/ryokamenseki.pdf (accessed on 15 February 2025). (In Japanese).
- DJI INSPIRE2 User Manual (Japanese Version). Available online: https://dl.djicdn.com/downloads/inspire_2/20170315/INSPIRE+2+User+Manual_JP.pdf (accessed on 5 February 2025). (In Japanese).
- Dhruva, A.; Hartley, R.J.L.; Redpath, T.A.N.; Estarija, H.J.C.; Cajes, D.; Massam, P.D. Effective UAV Photogrammetry for Forest Management: New Insights on Side Overlap and Flight Parameters. Forests 2024, 15, 2135. [Google Scholar] [CrossRef]
- Hao, Z.; Lin, L.; Post, C.J.; Jiang, Y.; Li, M.; Wei, N.; Yu, K.; Liu, J. Assessing tree height and density of a young forest using a consumer unmanned aerial vehicle (UAV). New For. 2021, 52, 843–862. [Google Scholar] [CrossRef]
- Karthigesu, J.; Owari, T.; Tsuyuki, S.; Hiroshima, T. UAV Photogrammetry for Estimating Stand Parameters of an Old Japanese Larch Plantation Using Different Filtering Methods at Two Flight Altitudes. Sensors 2023, 23, 9907. [Google Scholar] [CrossRef]
- Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating tree height and diameter at breast height (DBH) from digital surface models and orthophotos obtained with an unmanned aerial system for a Japanese cypress (Chamaecyparis obtusa) forest. Remote Sens. 2018, 10, 13. [Google Scholar] [CrossRef]
- Krause, S.; Sanders, T.G.M.; Mund, J.-P.; Greve, K. UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring. Remote Sens. 2019, 11, 758. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Saloň, Š.; Chudý, F.; Tunák, D. Accuracy of photogrammetric UAV-based point clouds under conditions of partially open forest canopy. Forests 2017, 8, 151. [Google Scholar] [CrossRef]
- Lipwoni, V.; Watt, M.S.; Hartley, R.J.L.; Leonardo, E.M.C.; Morgenroth, J. A comparison of photogrammetric software for deriving structure-from-motion 3D point clouds and estimating tree heights. N. Z. J. For. 2022, 66, 18. [Google Scholar]
- Kim, J.; Kim, I.; Ha, E.; Choi, B. UAV photogrammetry for soil surface deformation detection in a timber harvesting area, South Korea. Forests 2023, 14, 980. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, H.; Yang, W. Forest growth monitoring based on tree canopy 3D reconstruction using UAV aerial photogrammetry. Forests 2019, 10, 1052. [Google Scholar] [CrossRef]
- Getzin, S.; Nuske, R.S.; Wiegand, K. Using unmanned aerial vehicles (UAV) to quantify spatial gap patterns in forests. Remote Sens. 2014, 6, 6988–7004. [Google Scholar] [CrossRef]
- Avtar, R.; Chen, X.; Fu, J.; Alsulamy, S.; Supe, H.; Pulpadan, Y.A.; Louw, A.S.; Tatsuro, N. Tree Species Classification by Multi-Season Collected UAV Imagery in a Mixed Cool-Temperate Mountain Forest. Remote Sens. 2024, 16, 4060. [Google Scholar] [CrossRef]
- Burdziakowski, P.; Bobkowska, K. UAV Photogrammetry under Poor Lighting Conditions—Accuracy Considerations. Sensors 2021, 21, 3531. [Google Scholar] [CrossRef]
- Fakhri, A.; Latifi, H.; Mohammadi Samani, K.; Fassnacht, F.E. Improving the accuracy of forest structure analysis by consumer-grade UAV photogrammetry through an innovative approach to mitigate lens distortion effects. Remote Sens. 2025, 17, 383. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pattern | Date of Capture | Flight Conditions Altitude (m)—Overlap (%)—Side Overlap (%) | GCP Numbers |
|---|---|---|---|
| A | January 2024 | H100—OL90—SL90 | 4: Nos. 1, 2, 3′, 4 |
| B | January 2024 | H100—OL90—SL90 | 5: Nos. 1, 2, 3′, 4, 5 |
| C | September 2023 | H100—OL90—SL90 | 4: Nos. 1, 2, 3, 4 |
| D | January 2024 | H120—OL90—SL90 | 4: Nos. 1, 2, 3′, 4 |
| E | January 2024 | H120—OL90—SL90 | 5: Nos. 1, 2, 3′, 4, 5 |
| F | July 2023 | H120—OL90—SL90 | 4: Nos. 1, 2, 3, 4 |
| FCP | NC/NT | MRE (pix) | GSD (cm) | NDP (Points) | AD (per m2) |
|---|---|---|---|---|---|
| A | 226/226 | 0.176 | 1.22 | 32,136,053 | 1300 |
| B | 226/226 | 0.176 | 1.17 | 32,554,781 | 1513 |
| C | 195/195 | 0.249 | 1.33 | 23,634,621 | 695 |
| D | 158/158 | 0.185 | 1.49 | 22,542,910 | 639 |
| E | 158/158 | 0.21 | 1.39 | 22,679,108 | 813 |
| F | 140/140 | 0.169 | 1.48 | 18,220,310 | 526 |
| MV | A | B | C | D | E | F | |
|---|---|---|---|---|---|---|---|
| MV | × | 0.146 | <0.001 ** | <0.001 ** | <0.001 ** | <0.001 ** | <0.001 ** |
| A | — | × | 0.030 * | <0.001 ** | <0.001 ** | 0.124 | <0.001 ** |
| B | — | — | × | <0.001 ** | <0.001 ** | 1 | 0.132 |
| C | — | — | — | × | 1 | <0.001 ** | 0.131 |
| D | — | — | — | — | × | <0.001 ** | 0.004 ** |
| E | — | — | — | — | — | × | 0.032 * |
| F | — | — | — | — | — | — | × |
| MV | A | B | C | D | E | F | |
|---|---|---|---|---|---|---|---|
| MV | × | 0.677 | 1 | <0.001 ** | <0.001 ** | 0.196 | <0.001 ** |
| A | — | × | 0.321 | <0.001 ** | <0.001 ** | <0.001 ** | <0.001 ** |
| B | — | — | × | <0.001 ** | <0.001 ** | 0.432 | <0.001 ** |
| C | — | — | — | × | <0.001 ** | <0.001 ** | <0.001 ** |
| D | — | — | — | — | × | <0.001 ** | <0.001 ** |
| E | — | — | — | — | — | × | <0.001 ** |
| F | — | — | — | — | — | — | × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kameyama, S. Influence of Ground Control Point Placement and Surrounding Environment on Unmanned Aerial Vehicle-Based Structure-from-Motion Forest Resource Estimation. Drones 2025, 9, 258. https://doi.org/10.3390/drones9040258
Kameyama S. Influence of Ground Control Point Placement and Surrounding Environment on Unmanned Aerial Vehicle-Based Structure-from-Motion Forest Resource Estimation. Drones. 2025; 9(4):258. https://doi.org/10.3390/drones9040258
Chicago/Turabian StyleKameyama, Shohei. 2025. "Influence of Ground Control Point Placement and Surrounding Environment on Unmanned Aerial Vehicle-Based Structure-from-Motion Forest Resource Estimation" Drones 9, no. 4: 258. https://doi.org/10.3390/drones9040258
APA StyleKameyama, S. (2025). Influence of Ground Control Point Placement and Surrounding Environment on Unmanned Aerial Vehicle-Based Structure-from-Motion Forest Resource Estimation. Drones, 9(4), 258. https://doi.org/10.3390/drones9040258