
State-of-the-Art Review on the Application of Unmanned Aerial Vehicles (UAVs) in Power Line Inspections: Current Innovations, Trends, and Future Prospects



Abstract
1. Introduction
- Adopt the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) framework to ensure a systematic, transparent, and comprehensive review process.
- Review advancements in UAV-based power line inspections, including fault detection, advanced algorithms, system challenges, robotic vision, autonomous UAV technologies, and AI-driven inspection systems.
- Highlight the emerging trends and observations in the UAV-based power line inspection research area from 2019 to 2023.
- Provide recommendations for future research directions based on the gaps identified in the current literature.
2. Progressions of UAVs in Power System Inspection
3. Research Methodology
3.1. Identification
3.2. Screening
3.3. Eligibility
3.4. Classification and Synthesis of Key Themes
4. Results and Discussion
4.1. Bibliometric Analysis
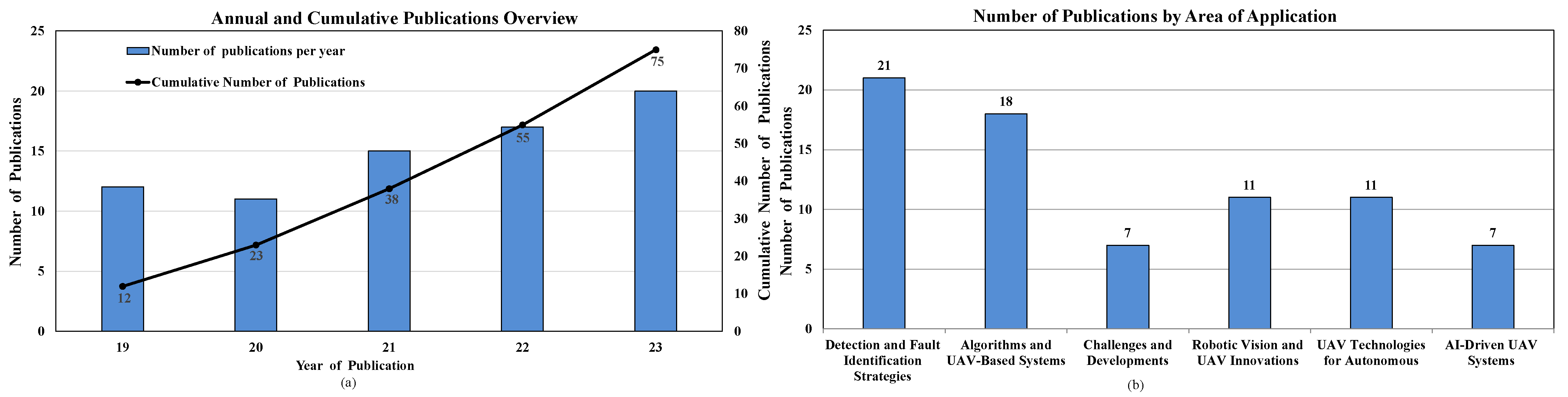
4.1.1. Annual Scientific Production and Application Areas of UAV Usage in Power Line Inspections
4.1.2. Most Cited Journals and Conferences in UAV Power Line Inspections
4.1.3. Top 10 Most Cited Publications in UAV Power Line Inspections
4.2. Innovative Advancements in UAV-Based Power Line Inspections
4.2.1. UAV-Based Approaches and Algorithms for Power Line Fault Detection and Inspection
4.2.2. Challenges and Developments in UAVs for Monitoring
4.2.3. Robotic Vision and UAV Innovations for Enhanced Power Line Inspections
4.2.4. Advancements in UAV Technology for Autonomous Power Line Inspections
4.2.5. AI-Driven UAV Systems for Power Line Inspections
4.3. Related Trend Analysis
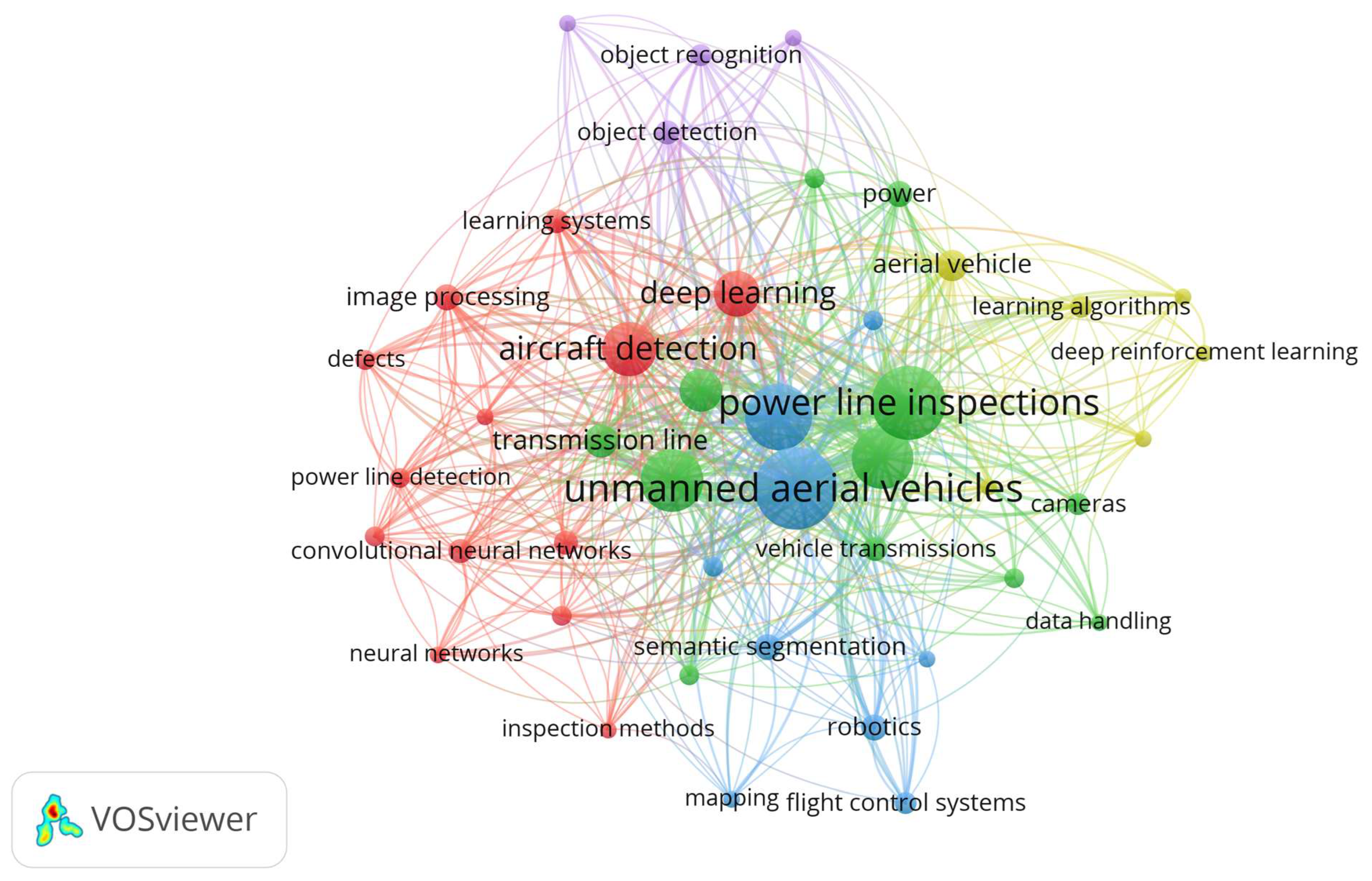
4.3.1. Cluster Analysis of UAV Applications in Inspection Tasks
4.3.2. Network Map Visualization Analysis of UAV Applications in Inspection Tasks
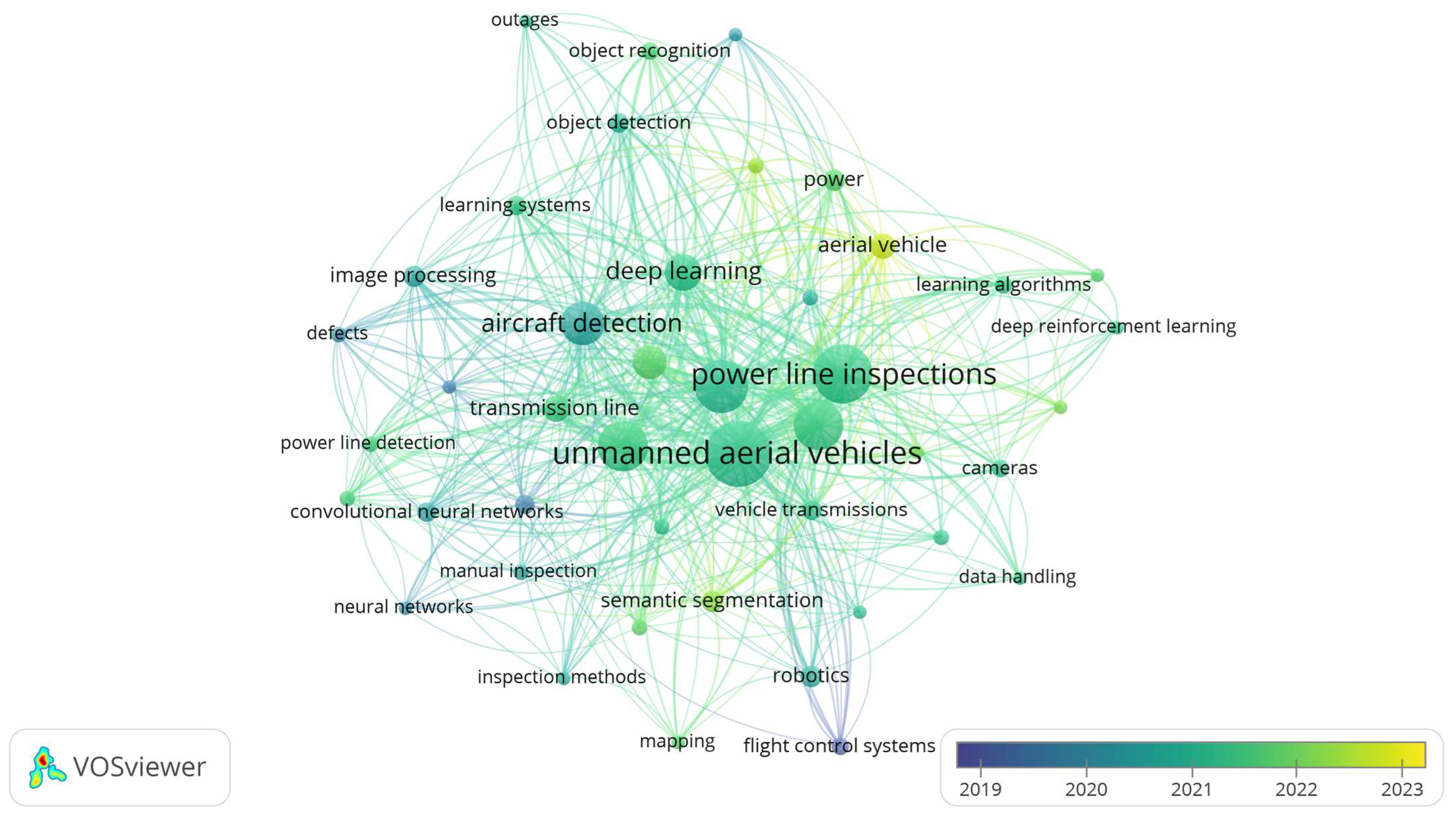
4.3.3. Overlay Map Visualization Analysis of UAV Applications in Inspection Tasks
5. Overall Discussion and Observations
6. Conclusions and Proposed Future Research Directions
- While image processing techniques like reinforcement learning and GAN-based deblurring have enhanced UAV capabilities, effective coordination of multiple UAVs for large-scale inspections is still lacking. Research should explore advanced swarm intelligence and cooperative control algorithms.
- UAV performance is affected by EMI, which can disrupt navigation and data transmission. There is a need for EMI-resistant UAVs and improved shielding techniques to enhance operational reliability.
- Limited battery life affects UAV flight duration, posing a significant challenge for long-range power line inspections. Research should explore wireless charging solutions, energy-efficient navigation, and hybrid power sources to extend UAV endurance.
- UAVs have yet to be fully integrated into predictive maintenance frameworks and smart grid operations. Future studies should focus on seamless data exchange, interoperability with grid monitoring systems, and AI-driven decision-making.
- The shift toward predictive analytics and automation highlights the importance of enhancing onboard AI processing capabilities. Future research should focus on real-time edge computing and adaptive learning algorithms to improve UAV autonomy in inspections.
- UAVs must be adapted to function effectively in extreme conditions, such as high winds, heavy rainfall, and fluctuating temperatures. Research should explore materials, aerodynamics, and sensor technologies that improve UAV durability and operational reliability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Saelam, K. Editorial note on Unmanned aerial vehicle. J. Aeronaut. Aerosp. Eng. 2021, 10, 245. Available online: https://api.semanticscholar.org/CorpusID:238324644, (accessed on 11 August 2024).
- Tsach, S.; Tatievsky, A.; London, L. Unmanned Aerial Vehicles (UAVs). In Encyclopedia of Aerospace Engineering; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Alotaibi, A.; Chatwin, C.; Birch, P. Ubiquitous Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Shanlax Int. J. Arts Sci. Humanit. 2023, 11, 62–90. [Google Scholar]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Jaykumar, J. Drone types and its applications—A survey. Int. Res. J. Eng. Technol. 2020, 7, 7360–7368. [Google Scholar]
- Malone, P.K.; Apgar, H.E.; Stukes, S.; Sterk, S. Unmanned Aerial Vehicles unique cost estimating requirements. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Parrott, E. Drones. In Encyclopedia of Security and Emergency Management; Shapiro, L.R., Maras, M.H., Eds.; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Petrova, T.; Petrov, Z. Economic factors in the development and application of UAV’s and the fight with wild fires. Int. E-J. Adv. Soc. Sci. 2020, 6, 73–79. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.I.; Dou, Z.; Almaita, E.K.; Khalil, I.M.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar]
- Albeaino, G.; Gheisari, M.; Franz, B. A systematic review of unmanned aerial vehicle application areas and technologies in the AEC domain. J. Inf. Technol. Constr. 2019, 24, 381–405. [Google Scholar]
- Kapustina, L.; Izakova, N.; Makovkina, E.; Khmelkov, M. The global drone market: Main development trends. In Proceedings of the Globalization and Its Socio-Economic Consequences, Zilina, Slovak Republic, 13–14 October 2021; SHS Web Conference: Les Ulis, France, 2021; Volume 129, pp. 1–8. [Google Scholar] [CrossRef]
- Kordos, A.; Kmiotek, M.; Żyłka, W.M.; Muszyński, T. The problem of recycling of unmanned aerial vehicles. Adv. Sci. Technol. Res. J. 2024, 18, 277–288. [Google Scholar] [CrossRef]
- Vascik, P.D.; Jung, J. Assessing the impact of operational constraints on the near-term unmanned aircraft system traffic management supported market. In Proceedings of the AIAA Aviation Forum, Washington, DC, USA, 13–17 June 2016; American Institute of Aeronautics and Astronautics (AIAA): Reston, VA, USA, 2016; pp. 1–17. [Google Scholar] [CrossRef]
- Rawlins, L. Uncrewed Aerial Vehicles (UAVs). In AntarcticGlaciers.org; Royal Holloway University of London: London, UK, 2023; pp. 1–16. [Google Scholar]
- Garg, P.K. Characterisation of Fixed-Wing Versus Multirotors UAVs/Drone. J. Geomat. 2022, 16, 152–158. [Google Scholar]
- Krishnaraj, S.; Senthil Kumar, R.; Gokula Krishnan, A.; Ganeshkumar, G.; Mohan, M.; Nirmal, M. Aerodynamic Analysis of Hybrid Drone. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1012, 012023. [Google Scholar]
- Ramesh, P.; Jeyan, J.M.L. Comparative Analysis of Fixed-Wing, Rotary-Wing and Hybrid Mini Unmanned Aircraft Systems (UAS) from the Applications Perspective. INCAS Bull. 2022, 14, 137–151. [Google Scholar]
- Hakim, M.; Pratiwi, H.; Nugraha, A.; Yatmono, S.; Wardhana, A.; Damarwan, E.; Agustianto, T.; Noperi, S. Development of Unmanned Aerial Vehicle (UAV) Fixed-Wing for Monitoring, Mapping and Dropping applications on agricultural land. J. Phys. Conf. Ser. 2021, 2111, 012051. [Google Scholar]
- Atole, R.R.; Bello, L.; Lirag, J.R.S. Eyes in the Sky: A Review of Civilian Unmanned Aerial Vehicles (UAVs). Int. J. Comput. Appl. 2017, 173, 36–41. [Google Scholar]
- Nugroho, G.; Taha, Z.; Nugraha, T.S.; Hadsanggeni, H. Development of a Fixed Wing Unmanned Aerial Vehicle (UAV) for Disaster Area Monitoring and Mapping. J. Mechatronics Electr. Power Veh. Technol. 2015, 6, 83–88. [Google Scholar]
- Yi, W.; Liming, C.; Lingyu, K.; Jie, Z.; Mia, W. Research on application mode of large fixed-wing UAV system on overhead transmission line. In Proceedings of the 2017 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 27–29 October 2017; pp. 88–91. [Google Scholar]
- Sonkar, S.; Kumar, P.; Philip, D.; Ghosh, A.K. Low-Cost Smart Surveillance and Reconnaissance Using VTOL Fixed Wing UAV. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–7. [Google Scholar]
- Dong, J.; Liu, D. Sensor Data Prediction for Fixed-wing Drone Based on Online Sequential Learning. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference, Ottawa, ON, Canada, 16–19 May 2022; pp. 1–5. [Google Scholar]
- Carholt, O.C.; Fresk, E.; Andrikopoulos, G.; Nikolakopoulos, G. Design, modelling and control of a Single Rotor UAV. In Proceedings of the Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 840–845. [Google Scholar]
- García, O.; Sanchez, A.; Escareño, J.; Lozano, R. Tail-sitter UAV having one tilting rotor: Modeling, Control and Real-Time Experiments. IFAC Proc. 2008, 41, 809–814. [Google Scholar]
- Gamble, G.; Yatsko, A.; Hockley, C.; Currier, P. Issues facing the development of a single-winged rotorcraft’s control system. In Proceedings of the 2012 IEEE Southeastcon, Orlando, FL, USA, 15–18 March 2012; pp. 1–4. [Google Scholar]
- Imam, A.; Bicker, R. Design and Construction of a Small-scale Rotorcraft UAV System. Int. J. Eng. Sci. Innov. Technol. 2014, 3, 96–109. [Google Scholar]
- Nathan, P.T.; Almurib HA, F.; Kumar, T.N. A review of autonomous multi-agent quad-rotor control techniques and applications. In Proceedings of the 2011 International Conference on Mechatronics (ICOM), Kuala Lumpur, Malaysia, 17–19 May 2011; pp. 1–7. [Google Scholar]
- Steele, A.; Treurnicht, J. Review of standard rotor configurations for a micro unmanned aerial system. In Proceedings of the 2015 Pattern Recognition Association of South Africa and Robotics and Mechatronics International Conference (PRASA-RobMech), Port Elizabeth, South Africa, 26–27 November 2015; pp. 123–129. [Google Scholar]
- Jamisola, R.S.; Thebe, K.Z.; Ramalepa, L.P.; Mbedzi, O. Relative Jacobian-based Cooperative Control of Multi-rotor Drones. In Proceedings of the 2021 International Conference on Communication & Information Technology (ICICT), Basrah, Iraq, 5–6 June 2021; pp. 208–214. [Google Scholar]
- Agrawal, K.; Shrivastav, P. Multi-rotors: A Revolution In Unmanned Aerial Vehicle. Int. J. Sci. Res. 2015, 4, 1800–1804. [Google Scholar]
- Sudarshan, M.K.; Vignesh, S. Flight Formation of multiple Rotor-craft through Co-ordination flying. In Proceedings of the 2021 2nd International Conference for Emerging Technology (INCET), Belgaum, India, 21–23 May 2021; pp. 1–6. [Google Scholar]
- Ramli, H.; Kuntjoro, W.; Makhtar, A.K. Advanced Autonomous Multirotor Response System. Appl. Mech. Mater. 2013, 393, 299–304. [Google Scholar]
- Pi, H.; Li, X.; Yuan, C.; Yang, Z.; Wei, L.; Lian, Z. Application of Multi-Rotor UAV Patrol System in Safety and Quality Management of Power Grid Construction Projects. In Proceedings of the 2020 International Conference on Artificial Intelligence and Electromechanical Automation (AIEA), Tianjin, China, 26–28 June 2020; pp. 416–419. [Google Scholar]
- Basiri, A.; Mariani, V.; Silano, G.; Aatif, M.; Iannelli, L.; Glielmo, L. A survey on the application of path-planning algorithms for multi-rotor UAVs in precision agriculture. J. Navig. 2022, 75, 364–383. [Google Scholar]
- Elouarouar, S.; Medromi, H. Multi-Rotors Unmanned Aerial Vehicles Power Supply and Energy Management. E3S Web Conf. 2022, 336, 00068. [Google Scholar]
- Chen, J.; Zhou, Y.; Lv, Q.; Deveerasetty, K.K.; Dike, H.U. A Review of Autonomous Obstacle Avoidance Technology for Multi-rotor UAVs. In Proceedings of the 2018 IEEE International Conference on Information and Automation (ICIA), Wuyishan, China, 11–13 August 2018; pp. 244–249. [Google Scholar]
- Shaqura, M.; Alzuhair, K.; Abdellatif, F.; Shamma, J. Human Supervised Multirotor UAV System Design for Inspection Applications. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Security, PH, USA, 6–8 August 2018; pp. 1–6. [Google Scholar]
- Montufar, D.I.; Muñoz, F.; Espinoza, E.S.; García, O.; Salazar, S. Multi-UAV testbed for aerial manipulation applications. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 830–835. [Google Scholar]
- Liu, Y.; Shi, J.; Liu, Z.; Huang, J.; Zhou, T. Two-layer routing for high-voltage powerline inspection by cooperated ground vehicle and drone. Energies 2019, 12, 1385. [Google Scholar] [CrossRef]
- Song, Y.; Wang, H.; Zhang, J. A Vision-Based Broken Strand Detection Method for a Power-Line Maintenance Robot. IEEE Trans. Power Deliv. 2014, 29, 2154–2161. [Google Scholar]
- Rodriguez-Castaño, A.; Nekoo, S.R.; Romero, H.; Salmoral, R.; Acosta, J.Á.; Ollero, A. Installation of Clip-Type Bird Flight Diverters on High-Voltage Power Lines with Aerial Manipulation Robot: Prototype and Testbed Experimentation. Appl. Sci. 2021, 11, 7427. [Google Scholar] [CrossRef]
- Matikainen, L.; Lehtomäki, M.; Ahokas, E.; Hyyppä, J.; Karjalainen, M.; Jaakkola, A.; Kukko, A.; Heinonen, T. Remote sensing methods for power line corridor surveys. ISPRS J. Photogramm. Remote Sens. 2016, 119, 10–31. [Google Scholar]
- Mostashfi, A.; Fakhari, A.; Badri, M.A. A novel design of inspection robot for high-voltage power lines. Ind. Robot Int. J. 2014, 41, 166–175. [Google Scholar]
- Pagnano, A.; Höpf, M.; Teti, R. A roadmap for automated power line inspection. Maintenance and repair. Procedia CIRP 2013, 12, 234–239. [Google Scholar]
- Jayatilaka, M.; Shanmugavel, M.; Ragavan, S.V. Robonwire: Design and development of a power line inspection robot. In Proceedings of the 1st Intemational and 16th National Conference on Machinesand Mechanisms, Roorkee, India, 18–20 December 2013; pp. 808–815. [Google Scholar]
- Chen, M.; Cao, Y.; Tian, Y.; Li, E.; Liang, Z.; Tan, M. A Passive Compliance Obstacle-Crossing Robot for Power Line Inspection and Maintenance. IEEE Robot. Autom. Lett. 2023, 8, 2772–2779. [Google Scholar]
- Katrasnik, J.; Pernus, F.; Likar, B. A Survey of Mobile Robots for Distribution Power Line Inspection. IEEE Trans. Power Deliv. 2010, 25, 485–493. [Google Scholar]
- Waleed, D.; Mukhopadhyay, S.; Tariq, U.; El-Hag, A.H. Drone-based ceramic insulators condition monitoring. IEEE Trans. Instrum. Meas. 2021, 70, 6007312. [Google Scholar]
- Yang, T.W.; Yin, H.; Ruan, Q.Q.; Han, J.D.; Qi, J.T.; Yong, Q.; Wang, Z.T.; Sun, Z.Q. Q. Overhead power line detection from UAV video images. In Proceedings of the 2012 19th International Conference on Mechatronics and Machine Vision in Practice, M2VIP, Auckland, New Zealand, 28–30 November 2012; pp. 74–79. [Google Scholar]
- Ogan, R.T.; Lott, D.; Paden, W. Electrical transmission line inspection using unmanned aircraft. In Proceedings of the 2019 IEEE Southeastcon, Huntsville, AL, USA, 11–14 April 2019; pp. 1–7. [Google Scholar]
- Mbuli, N.; Mendu, B.; Seitshiro, M.; Pretorius, J.H.C. What outage attributes affect the frequencies of forced transformer outages in Eskom regions? Evidence from 2007–2016 data. Energy Rep. 2020, 6, 474–482. [Google Scholar]
- Cacace, J.; Orozco-Soto, S.M.; Suarez, A.; Caballero, A.; Orsag, M.; Bogdan, S.; Vasiljevic, G.; Ebeid, E.; Rodriguez, J.A.A.; Ollero, A. Safe local aerial manipulation for the installation of devices on power lines: AERIAL-CORE first year results and designs. Appl. Sci. 2021, 11, 6220. [Google Scholar] [CrossRef]
- Gazzea, M.; Pacevicius, M.; Dammann, D.O.; Sapronova, A.; Lunde, T.M.; Arghandeh, R. Automated power lines vegetation monitoring using high-resolution satellite imagery. IEEE Trans. Power Deliv. 2022, 37, 308–316. [Google Scholar] [CrossRef]
- Zhang, W.; Ning, Y.; Suo, C. A method based on multi-sensor data fusion for UAV safety distance diagnosis. Electronics 2019, 8, 1467. [Google Scholar] [CrossRef]
- Wing, I.S.; Rose, A. Economic Consequence Analysis of Electric Power Infrastructure Disruptions: An Analytical General Equilibrium Approach. Energy Econom. 2020, 89, 104756. [Google Scholar] [CrossRef]
- LaCommare, K.; Eto, J. Understanding the cost of power interruptions to U.S. electricity consumers. Econ. Eng. Environ. Sci. 2004, 1–68. [Google Scholar]
- Tedeschi, P.; Oligeri, G.; Di Pietro, R. Leveraging jamming to help drones complete their mission. Ad. Hoc. Netw. 2020, 8, 5049–5064. [Google Scholar] [CrossRef]
- Caballero, A.; Paneque, J.L.; Martinez-de-Dios, J.R.; Maza, I.; Ollero, A. Multi-UAV systems for inspection of industrial and public infrastructures. In Infrastructure Robotics: Methodologies, Robotic Systems and Applications; Liu, D., Balaguer, C., Dissanayake, G., Kovac, M., Eds.; Wiley: Hoboken, NJ, USA, 2023; pp. 285–303. [Google Scholar] [CrossRef]
- Subahani, A.M.; Kathiresh, M.; Sanjeev, S. Transmission Line Inspection Using Unmanned Aerial Vehicle. In Role of Edge Analytics in Sustainable Smart City Development; Wiley: Hoboken, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Ahmed, M.F.; Mohanta, J.C.; Sanyal, A.; Yadav, P.S. Path planning of unmanned aerial systems for visual inspection of power transmission lines and towers. IETE J. Res. 2024, 70, 3259–3279. [Google Scholar] [CrossRef]
- Xu, B.; Zhao, Y.; Wang, T.; Chen, Q. Development of power transmission line detection technology based on unmanned aerial vehicle image vision. SN Appl. Sci. 2023, 5, 72. [Google Scholar] [CrossRef]
- Zormpas, A.; Moirogiorgou, K.; Kalaitzakis, K.; Plokamakis, G.A.; Partsinevelos, P.; Giakos, G.C.; Zervakis, M.E. Power Transmission Lines Inspection using Properly Equipped Unmanned Aerial Vehicle (UAV). In Proceedings of the 2018 IEEE International Conference on Imaging Systems and Techniques (IST), Krakow Poland, 16–18 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Causa, F.; Asciolla, M.; Opromolla, R.; Molina, P.; Mennella, A.; Nisi, M.; Fasano, G. UAV-based LiDAR mapping with Galileo-GPS PPP processing and cooperative navigation. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 938–947. [Google Scholar] [CrossRef]
- Fasano, G.; Causa, F.; Opromolla, R.; Asciolla, M.; Nisi, M.; Pozzoli, L.; Muscinelli, R. AMPERE: Exploiting Galileo for electrical asset mapping in emerging countries. In Proceedings of the 2021 IEEE 8th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Naples, Italy, 23–25 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 709–714. [Google Scholar] [CrossRef]
- Takaya, K.; Ohta, H.; Shibayama, K.; Inoue, A.; Kroumov, V. Construction of power line inspection system using a quadrotor helicopter. IEEE J. Trans. Electr. Electron. Eng. 2024, 19, 1803–1816. [Google Scholar] [CrossRef]
- Rafanavičius, V.; Cimmperman, P.; Taluntis, V.; Man, K.L.; Volkvicius, G.; Jurkynas, M.; Bezaras, J. Efficient Path Planning Methods for UAVs Inspecting Power Lines. In Proceedings of the 2017 International Conference on Platform Technology and Service (PlatCon), Busan, South Korea, 13–15 February 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Santos, T.; Moreira, M.; Almeida, J.M.; Dias, A.; Martins, A.; Dinis, J.; Formiga, J.; da Silva, E.P. PLineD: Vision-based power lines detection for Unmanned Aerial Vehicles. In Proceedings of the ICARSC 2017- International Conference on Autonomous Robot Systems and Competitions, Coimbra, Portugal, 26–28 April 2017; pp. 253–259. [Google Scholar] [CrossRef]
- İnce, E. Transmission line inspection with UAVs: A review of technologies, applications, and challenges. Int. J. Energy Smart Grid 2024, 9, 60–69. [Google Scholar] [CrossRef]
- Jordan, S.; Moore, J.; Hovet, S.E.; Box, J.; Perry, J.; Kirsche, K.; Lewis, D.; Tse, Z.T.H. State-of-the-art technologies for UAV inspections. IET Radar Sonar Navig. 2018, 12, 151–164. [Google Scholar]
- Deng, C.; Wang, S.; Huang, Z.; Tan, Z.; Liu, J. Unmanned Aerial Vehicles for Power Line Inspection: A Cooperative Way in Platforms and Communications. J. Commun. 2014, 9, 687–692. [Google Scholar] [CrossRef]
- Fj, F.; Meganathan, L.; Esha, M.; Thao, N.G.M.; Doss, A.S.A. Power Transmission Line Inspection Using Unmanned Aerial Vehicle—A Review. In Proceedings of the 2023 Innovations in Power and Advanced Computing Technologies (i-PACT 2023), Kuala Lumpur, Malaysia, 8–10 December 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Li, X.; Li, Z.; Wang, H.; Li, W. Unmanned aerial vehicle for transmission line inspection: Status, standardization, and perspectives. Front. Energy Res. 2021, 9, 713634. [Google Scholar] [CrossRef]
- Alhassan, A.B.; Zhang, X.; Shen, H.; Xu, H. Power transmission line inspection robots: A review, trends and challenges for future research. Electr. Power Energy Syst. 2020, 118, 105862. [Google Scholar]
- Yang, L.; Fan, J.; Liu, Y.; Li, E.; Peng, J.; Liang, Z. A Review on State-of-the-Art Power Line Inspection Techniques. IEEE Trans. Instrum. Meas. 2020, 69, 9350–9365. [Google Scholar]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Naren; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad. Hoc. Netw. 2021, 111, 102324. [Google Scholar]
- Foudeh, H.A.; Luk, P.C.-K.; Whidborne, J.F. An Advanced Unmanned Aerial Vehicle (UAV) Approach via Learning-Based Control for Overhead Power Line Monitoring: A Comprehensive Review. IEEE Access 2021, 9, 130410–130433. [Google Scholar] [CrossRef]
- Williams, M.; Jones, D.I.; Earp, G.K. Obstacle avoidance during aerial inspection of power lines. Aircr. Eng. Aerosp. Technol. 2001, 73, 472–479. [Google Scholar]
- Martins, W.M.; Filho AJ, D.; de Jesus, L.D.; Souza, A.D.; Ramos, A.B.; Pimenta, T. Tracking for inspection in energy transmission power lines using unmanned aerial vehicles: A systematic review of current and specific literature. IEEE Int. Conf. Robot. Autom. 2020, 9, 233–243. [Google Scholar]
- Surantha, N.; Iwao, T.; Ren, Z.; Morishita, H. Digital Transformation on Power Transmission Line Inspection using Autonomous Drone and Deep Learning. In Proceedings of the 2022 2nd International Conference on Robotics, Automation and Artificial Intelligence (RAAI), Singapore, 9–11 December 2022; pp. 80–86. [Google Scholar]
- Liu, X.; Miao, X.; Jiang, H.; Chen, J. Data analysis in visual power line inspection: An in-depth review of deep learning for component detection and fault diagnosis. Annu. Rev. Control 2020, 50, 253–277. [Google Scholar] [CrossRef]
- Liu, X.; Miao, X.; Jiang, H.; Chen, J. Review of data analysis in vision inspection of power lines with an in-depth discussion of deep learning technology. arXiv 2020, arXiv:2003.09802. [Google Scholar]
- Sun, S.; Liu, Y.; Yi, Z.; Wang, K.; Yu, P.; Zhao, K.; Yang, T. Review of autonomous inspection technology for power lines using UAVs. In Proceedings of the 2021 IEEE International Conference on Electrical Engineering and Mechatronics Technology (ICEEMT), Qingdao, China, 2–4 July 2021; pp. 481–484. [Google Scholar]
- Nguyen, V.N.; Jenssen, R.; Roverso, D. Automatic autonomous vision-based power line inspection: A review of current status and the potential role of deep learning. Int. J. Electr. Power Energy Syst. 2018, 99, 107–120. [Google Scholar] [CrossRef]
- Gonçalves, R.; De Oliveira, M.; Rocioli, M.; Souza, F.C.; Gallo, C.; Sudbrack DE, T.; Trautmann, P.V.; Clasen, B.C.; Homma, R. Drone–Robot to Clean Power Line Insulators. Sensors 2023, 23, 5529. [Google Scholar] [CrossRef]
- Ellis, N. Inspection of Power Transmission Lines Using UAVs. Univ. S. Queensland Fac. Bachelor’s Thesis, University of Southern Queensland, Toowoomba, Australia, 2013; pp. 1–87. [Google Scholar]
- Wang, Z.; Gao, Q.; Xu, J.; Li, D. A Review of UAV Power Line Inspection. In Advances in Guidance, Navigation and Control; Springer: Singapore, 2021; pp. 3147–3159. [Google Scholar]
- Fahmani, L.; Benhadou, S.; Medromi, H. The State-of-the-Art of Safe Fly Zone for a Power Transmission Lines Inspection UAV. Lect. Notes Netw. Syst. 2022, 455, 571–578. [Google Scholar]
- Elmeseiry, N.; Alshaer, N.; Ismail, T. A Detailed Survey and Future Directions of Unmanned Aerial Vehicles (UAVs) with Potential Applications. Aerospace 2021, 8, 363. [Google Scholar] [CrossRef]
- Aber, J.S.; Marzolff, I.; Ries, J.B.; Aber, S.E.W. Unmanned Aerial Systems. In Small-Format Aerial Photography and UAS Imagery: Principles, Techniques and Geoscience Applications; Elsevier: Amsterdam, The Netherlands, 2019; pp. 119–139. [Google Scholar]
- Malle, N.H.; Nyboe, F.F.; Ebeid, E. Survey and evaluation of sensors for overhead cable detection using UAVs. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems, Athens, Greece, 15–18 June 2021; pp. 361–370. [Google Scholar]
- Aminifar, F.; Rahmatian, F. Unmanned aerial vehicles in modern power systems. IEEE Electrif. Mag. 2020, 8, 107–116. [Google Scholar] [CrossRef]
- Du, W.; Niu, J.; Wang, M.; Zhang, J.; Yang, Y.; Li, Y. An Analysis Model of Helicopter and UAV in Overhead Powerline Inspection. IOP Conf. Ser. Earth Environ. 2018, 189, 062056. [Google Scholar] [CrossRef]
- Nobuhiro, K.; Tsutsumi, N.; Teshigawara, T.; Ota, D.; Miyoshi, H.; Yamamoto, K.; Minoura, F.; Tomonori, S.; Tsuyoshi, C.; Piwowarczyk, W.; et al. Autonomous Drone System Development for Power Transmission Line Inspections. In Proceedings of the 9th IIAE International Conference on Industrial Application Engineering 2021, Kitakyushu, Japan, 26–30 March 2021; pp. 172–176. [Google Scholar]
- Zhang, Z.; Chen, G.; Huang, C.; Hu, Q. Grid Industry Based Intelligent Ground Monitoring System of UAV Inspection. In Proceedings of the 2022 Global Conference on Robotics, Artificial Intelligence and Information Technology (GCRAIT), Chicago, IL, USA, 30–31 July 2022; pp. 32–35. [Google Scholar]
- Rafique, S.F.; Bodla, M.K.; Ahmed, Z.; Nasir, U.; Zaidi, A.; Saleem, M. Design and implementation of a UAV for power system utility inspection. In Proceedings of the 2014 16th International Power Electronics and Motion Control Conference and Exposition, Antalya, Turkey, 21–24 September 2014; pp. 1146–1150. [Google Scholar]
- Li, Z.; Zhang, Y.; Wu, H.; Suzuki, S.; Namiki, A.; Wang, W. Design and Application of a UAV Autonomous Inspection System for High-Voltage Power Transmission Lines. Remote Sens. 2023, 15, 865. [Google Scholar] [CrossRef]
- Abubakar, A.; Farah, M.; Alsheikh, M.; Saif, A.-W.A. Optimal altitude range for image collection drone from agricultural areas with image resolution and power consumption constraints. In Proceedings of the 2023 20th International Multi-Conference on Systems, Signals & Devices (SSD), Mahdia, Tunisia, 20–23 February 2023; pp. 689–693. [Google Scholar] [CrossRef]
- Leva, S.; Aghaei, M.; Grimaccia, F. PV power plant inspection by UAS: Correlation between altitude and detection of defects on PV modules. In Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 1921–1926. [Google Scholar] [CrossRef]
- Aghaei, M.; Dolara, A.; Leva, S.; Grimaccia, F. Image resolution and defects detection in PV inspection by unmanned technologies. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Komar, G.; Pischler, O.; Schichler, U.; Vieriu, R.L.; Birchbauer, J.A. Automatic UAV-based inspection of overhead lines and substations: Beyond visible spectrum. In Proceedings of the 2020 8th International Conference on Condition Monitoring and Diagnosis (CMD), Phuket, Thailand, 25–28 October 2020; pp. 210–213. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, X.; Fang, Y.; Chen, S. UAV low altitude photogrammetry for power line inspection. ISPRS Int. J. Geo-Inf. 2017, 6, 14. [Google Scholar] [CrossRef]
- Montambault, S.; Beaudry, J.; Toussaint, K.; Pouliot, N. On the application of VTOL UAVs to the inspection of power utility assets. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry (CARPI), Montreal, QC, Canada, 5–7 October 2010; pp. 1–7. [Google Scholar] [CrossRef]
- He, Y.; Liu, Z.; Guo, Y.; Zhu, Q.; Fang, Y.; Yin, Y.; Wang, Y.; Zhang, B.; Liu, Z. UAV-based sensing and imaging technologies for power system detection, monitoring, and inspection: A review. Nondestruct. Test. Eval. 2024, 1–68. [Google Scholar]
- Bearman, M.; Smith C., D.; Carbone, A.; Slade, S.; Baik, C.; Hughes-Warrington, M.; Neumann D., L. Systematic review methodology in higher education. High. Educ. Res. Dev. 2012, 31, 625–640. [Google Scholar] [CrossRef]
- Torres-Carrión, P.; González-González, C.; Aciar, S.; Morale G., R. Methodology for systematic literature review applied to engineering and education. In Proceedings of the 2018 IEEE Global Engineering Education Conference (EDUCON), Santa Cruz de Tenerife, Spain, 17–20 April 2018; pp. 1364–1373. [Google Scholar] [CrossRef]
- García-Peñalvo, F. Developing robust state-of-the-art reports: Systematic Literature Reviews. Educ. Knowl. Soc. 2022, 23, 1–21. [Google Scholar]
- Ferreras-Fernández, T.; Rodero H., M.; García-Peñalvo, F.; José, A. The systematic review of literature in LIS: An approach. In Proceedings of the Fourth International Conference on Technological Ecosystems for Enhancing Multiculturality, Salamanca, Spain, 2–4 November 2016; pp. 291–296. [Google Scholar]
- Sutton, A.; Jones D., R.; Abrams, K.; Sheldon, T.; Song, F. Systematic Reviews and Meta-Analysis: A Structured Review of the Methodological Literature. J. Health Serv. Res. Policy 1999, 4, 49–55. [Google Scholar] [CrossRef]
- Bie, R. Methodology of systematic reviews: An introduction. Phys. Ther. Rev. 1996, 1, 47–51. [Google Scholar] [CrossRef]
- Pati, D.; Lorusso L., N. How to Write a Systematic Review of the Literature. Health Environ. Res. Des. 2018, 11, 3–5. [Google Scholar]
- Zhang, S.; Chen, B.; Wang, R.; Wang, J.; Zhong, L.; Gao, B. Unmanned Aerial Vehicle (UAV) Vision-based Detection of Power Line Poles by CPU-based Deep Learning Method. In Proceedings of the 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Suzhou, China, 29 July–2 August 2019; pp. 1630–1634. [Google Scholar]
- Wang, R.; Zhang, S.; Chen, B.; Xu, J.; Zhong, L. Unmanned aerial vehicle UAV vision-based detection and location of power towers for transmission line maintenance. In Proceedings of the IET Conference Proceeding, Liverpool, UK, 9–12 March 2020; pp. 1937–1941. [Google Scholar]
- Azevedo, F.; Dias, A.; Almeida, J.; Oliveira, A.; Ferreira, A.; Santos, T.; Martins, A.; Silva, E. LiDAR-based real-time detection and modeling of power lines for unmanned aerial vehicles. Sensors 2019, 19, 1812. [Google Scholar] [CrossRef]
- Fang, S.; Sheng, L.; Xiaoyu, W. Detection method of transmission line broken stock defects in aircraft inspection based on image processing technology. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; pp. 1715–1719. [Google Scholar]
- Solilo, M.; Doorsamy, W.; Paul, B.S. UAV Power Line Detection and Tracking using a Color Transformation. Proceedings of 2021 International Conference on Electrical, Computer and Energy Technologies (ICECET), Cape Town, South Africa, 9–10 December 2021; pp. 1–5. [Google Scholar]
- Xu, L.; Adebo, K.; Zhao, J.; Miao, L. Distributed Drones for Power Line Inspection with Weighted Consensus Control in Dynamic Network Systems. In Proceedings of the 2019 IEEE 3rd International Electrical and Energy Conference (CIEEC), Beijing, China, 7–9 September 2019; pp. 2049–2054. [Google Scholar]
- Li, H.; Dong, Y.; Liu, Y.; Ai, J. Design and Implementation of UAVs for Bird’s Nest Inspection on Transmission Lines Based on Deep Learning. Drones 2022, 6, 252. [Google Scholar] [CrossRef]
- Akhmetov, Y.; Nurmanova, V.; Bagheri, M.; Zollanvari, A.; Phung, T. Overhead Line Insulator Type Classification Using YOLOv3 Architectures. In Proceedings of the 2022 International Conference on Computing, Networking, Telecommunications & Engineering Sciences Applications (CoNTESA), Kodaikanal, India, 15–16 December 2022; pp. 36–40. [Google Scholar]
- Liu, K.; Zhong, L. Object detection of UAV power line inspection images based on federated learning. In Proceedings of the 2022 IEEE 5th International Electrical and Energy Conference (CIEEC), Nanjing, China, 27–29 May 2022; pp. 2372–2377. [Google Scholar]
- Korki, M.; Shankar, N.D.; Shah, R.N.; Waseem, S.M.; Hodges, S. Automatic Fault Detection of Power Lines using Unmanned Aerial Vehicle (UAV). In Proceedings of the 2019 1st International Conference on Unmanned Vehicle Systems-Oman (UVS), Muscat, Oman, 5–7 February 2019; pp. 1–6. [Google Scholar]
- Dai, Z.; Yi, J.; Zhang, H.; Wang, D.; Huang, X.; Ma, C. CODNet: A Center and Orientation Detection Network for Power Line Following Navigation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8014805. [Google Scholar] [CrossRef]
- Fang, S.; Haiyang, C.; Sheng, L.; Xiaoyu, W. A Framework of Power Pylon Detection for UAV-based Power Line Inspection. In Proceedings of the 2020 IEEE 5th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 12–14 June 2020; pp. 350–357. [Google Scholar]
- Han, G.; Wang, R.; Yuan, Q.; Zhao, L.; Li, S.; Zhang, M.; He, M.; Qin, L. Typical Fault Detection on Drone Images of Transmission Lines Based on Lightweight Structure and Feature-Balanced Network. Drones 2023, 7, 638. [Google Scholar] [CrossRef]
- Zhong, J.; Zhang, Y.; Wang, J.; Luo, C.; Miao, Q. Unmanned Aerial Vehicle Flight Data Anomaly Detection and Recovery Prediction Based on Spatio-Temporal Correlation. IEEE Trans. Reliab. 2022, 71, 457–468. [Google Scholar]
- Xing, J.; Cioffi, G.; Hidalgo-Carrio, J.; Scaramuzza, D. Autonomous Power Line Inspection with Drones via Perception-Aware MPC. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 1086–1093. [Google Scholar]
- Shuang, F.; Han, S.; Li, Y.; Lu, T. RSIn-Dataset: An UAV-Based Insulator Detection Aerial Images Dataset and Benchmark. Drones 2023, 7, 125. [Google Scholar] [CrossRef]
- Li, Y.; Qian, Q.; Duan, H.; Min, X.; Xu, Y.; Jiang, X. Boosting power line inspection in bad weather: Removing weather noise with channel-spatial attention-based UNet. Multimedia Tools Appl. 2024, 83, 88429–88445. [Google Scholar]
- Hoang, V.D.; Ebeid, E. Advanced Magnetic Energy Harvester for Charging Drones from Overhead Powerlines. In Proceedings of the 2023 25th European Conference on Power Electronics and Applications (EPE’23 ECCE Europe), Aalborg, Denmark, 4–8 September 2023; pp. 1–9. [Google Scholar]
- Ding, L.; Wang, J.; Wu, Y. Electric power line patrol operation based on vision and laser SLAM fusion perception. In Proceedings of the 2021 IEEE 4th International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 19–21 November 2021; pp. 125–129. [Google Scholar]
- Wang, M.; Lei, Y.; Liang, Y.; Lv, X.; Mo, W. AGI-Fedavg: A UAV Power Line Inspection Algorithm Based on Federated Learning. In Proceedings of the 2021 IEEE 3rd International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Changsha, China, 20–22 October 2021; pp. 1030–1034. [Google Scholar]
- Demkiv, L.; Ruffo, M.; Silano, G.; Bednar, J.; Saska, M. An Application of Stereo Thermal Vision for Preliminary Inspection of Electrical Power Lines by MAVs. In Proceedings of the 1 st AIRPHARO Workshop on Aerial Robotic Systems Physically Interacting with the Environment, Biograd na Moru, Croatia, 4–5 October 2021; pp. 1–8. [Google Scholar]
- Zheng, X.; Jia, R.; Aisikaer; Gong, L.; Zhang, G.; Dang, J. Component identification and defect detection in transmission lines based on deep learning. J. Intell. Fuzzy Syst. 2021, 40, 3147–3158. [Google Scholar]
- Siddiqui, Z.A.; Park, U. A Drone Based Transmission Line Components Inspection System with Deep Learning Technique. Energies 2020, 35, 3348. [Google Scholar]
- Li, D.; Wang, X.; Zhang, J.; Ji, Z. Automated deep learning system for power line inspection image analysis and processing: Architecture and design issues. Glob. Energy Interconnect. 2023, 6, 614–633. [Google Scholar]
- Vemula, S.; Frye, M. Mask R-CNN Powerline Detector: A Deep Learning approach with applications to a UAV. In Proceedings of the 39th Digital Avionics Systems Conference (DASC), Online, 11–15 October 2020; pp. 1–6. [Google Scholar]
- Liang, C.; Yin, Y.; Qin, Y.; He, X. A Deblurring Method of Electric Power Inspection Images Based on GAN. In Proceedings of the 2021 12th International Conference on Information, Intelligence, Systems & Applications (IISA), Guiyang, China, 12–14 July 2021; pp. 1–6. [Google Scholar]
- Song, J.; Qian, J.; Li, Y.; Liu, Z.; Chen, Y.; Chen, J. Automatic Extraction of Power Lines from Aerial Images of Unmanned Aerial Vehicles. Sensors 2022, 22, 6431. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, L.; Wang, Y.; Mei, X. Insulator self-shattering detection: A deep convolutional neural network approach. Multimedia Tools Appl. 2019, 78, 10097–10112. [Google Scholar]
- Pienroj, P.; Schonborn, S.; Birke, R. Exploring Deep Reinforcement Learning for Autonomous Powerline Tracking. In Proceedings of the IEEE INFOCOM 2019—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Paris, France, 29 April–2 May 2019; pp. 496–501. [Google Scholar]
- Ayoub, N.; Schneider-Kamp, P. Real-Time On-Board Deep Learning Fault Detection for Autonomous UAV Inspections. Electronics 2021, 10, 1091. [Google Scholar] [CrossRef]
- He, K.; Zhou, Q.; Shen, Y.; Gao, J.; Shuai, Z. Spatiotemporal Precise Routing Strategy for Multi-UAV-Based Power Line Inspection Using Hybrid Network of FANET and Satellite Internet. In Proceedings of the 2023 IEEE IAS Industrial and Commercial Power System Asia (IEEE I&CPS Asia 2023), Chongqing, China, 7–9 July 2023; pp. 1013–1018. [Google Scholar]
- Han, G.; Zhang, M.; Li, Q.; Liu, X.; Li, T.; Zhao, L.; Liu, K.; Qin, L. A Lightweight Aerial Power Line Segmentation Algorithm Based on Attention Mechanism. Machines 2022, 10, 881. [Google Scholar] [CrossRef]
- Zheng, X.; Ding, Z.; Zhang, X.; Mu, C. Path planning of power line inspection based on DDPG for obstacle avoidance with UAV. In Proceedings of the 2023 IEEE 6th International Electrical and Energy Conference (CIEEC), Hefei, China, 12–14 May 2023; pp. 2919–2923. [Google Scholar]
- Hamelin, P.; Miralles, F.; Lambert, G.; Lavoie, S.; Pouliot, N.; Montfrond, M.; Montambault, S. Discrete-time control of LineDrone: An assisted tracking and landing UAV for live power line inspection and maintenance. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 292–298. [Google Scholar]
- Shen, H.; Jiang, Y.; Deng, F.; Shan, Y. Task Unloading Strategy of Multi UAV for Transmission Line Inspection Based on Deep Reinforcement Learning. Electronics 2022, 11, 2188. [Google Scholar] [CrossRef]
- Kyuroson, A.; Koval, A.; Nikolakopoulos, G. Autonomous Point Cloud Segmentation for Power Lines Inspection in Smart Grid. IFAC-PapersOnLine 2023, 56, 11754–11761. [Google Scholar] [CrossRef]
- Titov, E.; Limanovskaya, O.; Lemekh, A.; Volkova, D. The Deep Learning Based Power Line Defect Detection System Built on Data Collected by the Cablewalker Drone. In Proceedings of the 2019 International Multi-Conference on Engineering, Computer and Information Sciences (SIBIRCON), Novosibirsk, Russia, 21–27 October 2019; pp. 700–704. [Google Scholar]
- An, D.; Chao, J.; Li, T.; Fang, L. WaveGNet: Wavelet-Guided Deep Learning for Efficient Aerial Power Line Detection. IEEE Sens. J. 2023, 24, 22037–22044. [Google Scholar] [CrossRef]
- Wang, R.; Xie, W.; Chen, B.; Wu, W.; Zhu, L. A Quality Evaluation Method of UAV Inspection Images Based on Semantic Segmentation. In Proceedings of the 2023 IEEE 7th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing China, 15–17 September 2023; pp. 2272–2276. [Google Scholar]
- Silano, G.; Baca, T.; Penicka, R.; Liuzza, D.; Saska, M. Power Line Inspection Tasks with Multi-Aerial Robot Systems Via Signal Temporal Logic Specifications. IEEE Robot. Autom. Lett. 2021, 6, 4169–4176. [Google Scholar] [CrossRef]
- Rad, S.S.; Kheirollahi, R.; Zhao, S.; Mostafa, A.; Zheng, Z.; Wang, Y.; Zhang, H.; Friedman, G.; Lu, F. Experimental Study of Magnetic Field Effect on Multi-Rotor Drones Operation in Autonomous Power Line Inspection. In Proceedings of the 2023 IEEE Transportation Electrification Conference & Expo (ITEC), Detroit, MI, USA, 21–23 June 2023; pp. 1–5. [Google Scholar]
- Mostafa, A.; Wang, Y.; Friedman, G.; Zhang, H.; Lu, F. Challenges in UAS Platform Design for Transmission Line Monitoring and Inspections. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Brussels, Belgium, 17–20 October 2022; pp. 1–5. [Google Scholar]
- Rad, S.S.; Kheirollahi, R.; Mostafa, A.; Zheng, Z.; Zhao, S.; Wang, Y.; Zhang, H.; Friedman, G.; Lu, F. Development and Testing of 10 kV/60Hz Modular Transformer to Study Strong Electric Field Impacts on Drones in Power Line Inspection Applications. In Proceedings of the 2023 IEEE Transportation Electrification Conference & Expo (ITEC), Detroit, MI, USA, 21–23 June 2023; pp. 1–5. [Google Scholar]
- Duan, S.; Lu, X.; Wu, H.; Zhang, H.; Zhang, Z.; Wang, G. Unmanned Aerial Vehicle Wireless Power Transfer System for Long-Distance Transmission Line Patrol. In Proceedings of the 2022 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Guangzhou, China, 4–7 November 2022; pp. 1324–1329. [Google Scholar]
- Skriver, M.; Stengaard, A.; Schultz, U.P.; Ebeid, E. Experimental Investigation of EMC Weaknesses in UAVs During Overhead Power Line Inspection. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 626–635. [Google Scholar]
- Cesoni, R.; Fantin, G.; Spadini, G.; Tonelli, F.; Sun, T.; Buratti, F. Experimental Tests on Electromagnetic Compatibility of a UAV in the Proximity of High Voltage Power Lines. In Proceedings of the 2022 13th International Conference on Live Maintenance (ICOLIM), Turin, Italy, 15–17 June 2022; pp. 1–7. [Google Scholar]
- Ye, J.; Pan, E.; Xu, W. Digital Video Stabilization Method Based on Periodic Jitters of Airborne Vision of Large Flapping Wing Robots. IEEE Trans. Circuits Syst. Video Technol. 2023, 34, 2591–2603. [Google Scholar] [CrossRef]
- Wang, Z.; Li, X.; Hu, W. A Flexible Towed Aerial Robot System for Stable X-ray Inspection of Power Lines. In Proceedings of the 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), Koh Samui, Thailand, 4–9 December 2023; pp. 1–6. [Google Scholar]
- Wang, Y.; Paul, H.; Miyazaki, R.; Rosales Martinez, R.; Kominami, T.; Ladig, R.; Shimonomura, K. Active Translatory Drive System with Docking Capability for UAV Power Line Inspection. In Proceedings of the 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Sapporo, Japan, 11–15 July 2022; pp. 689–694. [Google Scholar]
- Wang, H.; Li, E.; Yang, G.; Guo, R. Design of an Inspection Robot System with Hybrid Operation Modes for Power Transmission Lines. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 2571–2576. [Google Scholar]
- Damigos, G.; Lindgren, T.; Sandberg, S.; Nikolakopoulos, G. Performance of Sensor Data Process Offloading on 5G-Enabled UAVs. Sensors 2023, 23, 864. [Google Scholar] [CrossRef]
- Cantieri, A.R.; Wehrmeister, M.A.; Oliveira, A.S.; Lima, J.; Ferraz, M.; Szekir, G. Proposal of an Augmented Reality Tag UAV Positioning System for Power Line Tower Inspection. Adv. Intell. Syst. Comput. 2020, 1, 87–98. [Google Scholar]
- Liu, Z.; Miao, X.; Xie, Z.; Jiang, H.; Chen, J. Power Tower Inspection Simultaneous Localization and Mapping: A Monocular Semantic Positioning Approach for UAV Transmission Tower Inspection. Sensors 2022, 22, 7360. [Google Scholar] [CrossRef]
- Sun, C.; Liu, M.; Liu, C.; Feng, X.; Wu, H. An Industrial Quadrotor UAV Control Method Based on Fuzzy Adaptive Linear Active Disturbance Rejection Control. Electronics 2021, 10, 376. [Google Scholar] [CrossRef]
- Pan, G.; Lei, H.; An, J.; Zhang, S.; Alouini, M.-S. On the Secrecy of UAV Systems with Linear Trajectory. IEEE Trans. Wireless Commun. 2020, 19, 6277–6288. [Google Scholar] [CrossRef]
- Calvo, A.; Silano, G.; Capitan, J. Mission Planning and Execution in Heterogeneous Teams of Aerial Robots Supporting Power Line Inspection Operations. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 1644–1649. [Google Scholar]
- Silano, G.; Bednar, J.; Nascimento, T.; Capitan, J.; Saska, M.; Ollero, A. A Multi-Layer Software Architecture for Aerial Cognitive Multi-Robot Systems in Power Line Inspection Tasks. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems, ICUAS’21, Athens, Greece, 15–18 June 2021; pp. 1624–1629. [Google Scholar]
- Wang, J. Autonomous Localization and Navigation for Transmission Line Inspection of UAV. In Proceedings of the 2021 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 27–28 August 2021; pp. 98–104. [Google Scholar]
- Li, Y.; Zhang, W.; Li, P.; Ning, Y.; Suo, C. A Method for Autonomous Navigation and Positioning of UAV Based on Electric Field Array Detection. Sensors 2021, 21, 1146. [Google Scholar] [CrossRef] [PubMed]
- Savva, A.; Zacharia, A.; Makrigiorgis, R.; Anastasiou, A.; Kyrkou, C.; Kolios, P.; Panayiotou, C.; Theocharides, T. ICARUS: Automatic Autonomous Power Infrastructure Inspection with UAVs. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems, ICUAS’21, Athens, Greece, 15–18 June 2021; pp. 918–926. [Google Scholar]
- Takaya, K.; Ohta, H.; Kroumov, V.; Shibayama, K.; Nakamura, M. Development of UAV System for Autonomous Power Line Inspection. In Proceedings of the 2019 23rd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 9–11 October 2019; pp. 762–767. [Google Scholar]
- Schofield, O.B.; Lorenzen, K.H.; Ebeid, E. Cloud to Cable: A Drone Framework for Autonomous Power Line Inspection. In Proceedings of the 27th Euromicro Conference Series on Digital System Design (DSD), Paris, France, 28–30 August 2020; pp. 503–509. [Google Scholar]
- Iversen, N.; Schofield, O.B.; Cousin, L.; Ayoub, N.; Vom Bogel, G.; Ebeid, E. Design, Integration and Implementation of an Intelligent and Self-Recharging Drone System for Autonomous Power Line Inspection. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4168–4175. [Google Scholar]
- Lopez, R.L.; Sanchez MJ, B.; Jimenez, M.P.; Arrue, B.C.; Ollero, A. Autonomous UAV System for Cleaning Insulators in Power Line Inspection and Maintenance. Sensors 2021, 21, 8488. [Google Scholar] [CrossRef] [PubMed]
- Alexiou, D.; Zampokas, G.; Skartados, E.; Tsiakas, K.; Kostavelis, I.; Giakoumis, D.; Gasteratos, A.; Tzovaras, D. Visual Navigation Based on Deep Semantic Cues for Real-Time Autonomous Power Line Inspection. In Proceedings of the 2023 International Conference on Unmanned Aircraft Systems, Warsaw, Poland, 6–9 June 2023; pp. 1262–1269. [Google Scholar]
- Perez-Jimenez, M.; Montes-Grova, M.A.; Ramon-Soria, P.; Arrue, B.C.; Ollero, A. POSITRON: Lightweight Active Positioning Compliant Joints Robotic Arm in Power Lines Inspection. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 729–736. [Google Scholar]
- Zhao, N.; Huangfu, Y.; Zhang, Y.; Yue, Q. Consider No-Fly Zones and Calculate Unloading UAV Power Line Autonomous Patrol Track Planning Technology. Proc. SPIE—Int. Soc. Opt. Eng. 2023, 12779, 16–21. [Google Scholar]
- Cantieri, A.; Ferraz, M.; Szekir, G.; Teixeira, M.A.; Lima, J.; Oliveira, A.S.; Wehrmeister, M.A. Cooperative UAV-UGV Autonomous Power Pylon Inspection: An Investigation of Cooperative Outdoor Vehicle Positioning Architecture. Sensors 2020, 20, 6384. [Google Scholar] [CrossRef] [PubMed]
- Moreno, J.A.; Ruiz, C.; Satue, A.; Acosta, J.A.; Ollero, A. Design, Development and Testing of a Hybrid Fixed-Flapping Wing UAV. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems, Dubrovnik, Croatia, 21–24 June 2022; pp. 329–338. [Google Scholar]
- Rangel, R.K.; Maitelli, A.L.; Rodrigues, V.A.; Valente, D.R.G. Smart Cities—Automatic Power Lines Inspection. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–14. [Google Scholar]
- Tsellou, A.; Livanos, G.; Ramnalis, D.; Polychronos, V.; Plokamakis, G.; Zervakis, M.; Moirogiorgou, K. A UAV Intelligent System for Greek Power Lines Monitoring. Sensors 2023, 23, 8441. [Google Scholar] [CrossRef]
- Du, Q.; Dong, W.; Su, W.; Wang, Q. UAV Inspection Technology and Application of Transmission Line. In Proceedings of the 2022 2022 IEEE 5th International Conference on Information Systems and Computer Aided Education (ICISCAE), Zhuhai, China, 23–25 September 2022; pp. 594–597. [Google Scholar]
- Liu, W.; Liu, L.; He, G.; Li, P. Visualization of Power Corridor Based on UAV Line Inspection Data. Int. J. Wireless Inf. Netw. 2021, 28, 308–318. [Google Scholar] [CrossRef]
- Medrano, P.; Villadangos, J.; Astrain, J.J. UAS: IoT On-Line Sensors for Power Line Inspection. In Proceedings of the IEEE Sensors, Online, 25–28 October 2020; pp. 1–4. [Google Scholar]
- Constantin, A.; Dinculescu, R.-N. UAV Development and Impact in the Power System. In Proceedings of the 2019 8th International Conference on Power Systems (ICPS), Jaipur, India, 20–22 December 2019; pp. 1–5. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No. | UAV Type | Area of Application |
|---|---|---|
| [16] | Fixed-wing hybrid | Military and civil |
| [18,19,20,21,22,23] | Fixed-wing | Monitoring, mapping, agriculture, real estate, film and TV, oil and gas, construction, fisheries, wildlife surveillance, water management, security surveillance, reconnaissance in disaster, and power line inspections |
| [24,25,26,27,28,29] | Single-rotor | Agriculture, particularly for spraying fertilizers and pesticides |
| [31,32,33,34,35] | Multirotor | Military, delivery and shipping, rescue, search operations, forecasting weather, agriculture, entertainment, communication, video surveillance, defense, disaster management, surveillance, and construction industry |
| Ref. No. | Year | Authors | Ref. No. | Year | Authors |
|---|---|---|---|---|---|
| 4.2 Innovative Advancements in UAV-based Power Line Inspections | |||||
| 4.2.1 UAV-Based Approaches and Algorithms for Power Line Fault Detection and Inspection | |||||
| [113] | 2019 | Zhang et al. | [114] | 2020 | Wang et al. |
| [115] | 2019 | Azevedo et al. | [116] | 2020 | Fang et al. |
| [117] | 2021 | Solilo et al. | [118] | 2019 | Xu et al. |
| [119] | 2022 | Li et al. | [120] | 2022 | Akhmetov et al. |
| [121] | 2019 | Liu and Zhong | [122] | 2019 | Korki et al. |
| [123] | 2022 | Dai et al. | [124] | 2020 | Fang et al. |
| [125] | 2023 | Han et al. | [126] | 2022 | Zhong et al. |
| [127] | 2023 | Xing et al. | [128] | 2023 | Shuang et al. |
| [129] | 2023 | Li et al. | [130] | 2023 | Hoang and Ebeid |
| [131] | 2021 | Ding et al. | [132] | 2021 | Wang et al. |
| [133] | 2021 | Demkiv et al. | [134] | 2021 | Zheng et al. |
| [135] | 2020 | Siddiqui and Park | [136] | 2023 | Li et al. |
| [137] | 2020 | Vemula and Frye | [138] | 2023 | Liang et al. |
| [139] | 2022 | Song et al. | [140] | 2019 | Yang et al. |
| [141] | 2019 | Pienroj et al. | [142] | 2021 | Ayoub and Schneider-Kamp |
| [143] | 2023 | He et al. | [144] | 2022 | Han et al. |
| [145] | 2023 | Zheng et al. | [146] | 2019 | Hamelin et al. |
| [147] | 2022 | Shen et al. | [148] | 2023 | Kyuroson et al. |
| [149] | 2019 | Titov et al. | [150] | 2023 | An et al. |
| [151] | 2023 | Wang et al. | |||
| 4.2.2 Challenges and Developments | |||||
| [152] | 2021 | Silano et al. | [153] | 2023 | Rad et al. |
| [154] | 2022 | Mostafa et al. | [155] | 2023 | Rad et al. |
| [156] | 2022 | Duan et al. | [157] | 2022 | Skriver et al. |
| [158] | 2022 | Cesoni et al. | |||
| 4.2.3 Robotic Vision and UAV Innovations | |||||
| [159] | 2023 | Ye et al. | [160] | 2023 | Wang et al. |
| [161] | 2022 | Wang et al. | [162] | 2019 | Wang et al. |
| [163] | 2023 | Damigos et al. | [164] | 2020 | Cantieri et al. |
| [165] | 2022 | Liu et al. | [166] | 2021 | Sun et al. |
| [167] | 2020 | Pan et al. | [168] | 2022 | Calvo et al. |
| [169] | 2021 | Silano et al. | |||
| 4.2.4 UAV Technologies for Autonomous | |||||
| [170] | 2021 | Wang | [171] | 2021 | Li et al. |
| [172] | 2021 | Savva et al. | [173] | 2019 | Takaya et al. |
| [174] | 2020 | Schofield et al. | [175] | 2021 | Iversen et al. |
| [176] | 2021 | Lopez et al. | [177] | 2023 | Alexiou et al. |
| [178] | 2020 | Perez-Jimenez et al. | [179] | 2023 | Zhao et al. |
| [180] | 2020 | Cantieri et al. | |||
| 4.2.5 AI-Driven UAV Systems | |||||
| [181] | 2022 | Moreno et al. | [182] | 2022 | Rangel et al. |
| [183] | 2023 | Tsellou et al. | [184] | 2022 | Du et al. |
| [185] | 2021 | Liu et al. | [186] | 2020 | Medrano et al. |
| [187] | 2019 | Constantin and Dinculescu | |||
| Journal and Conference Titles | Total Citations |
|---|---|
| Sensors | 134 |
| Energies | 35 |
| IEEE International Conference on Intelligent Robots and Systems | 35 |
| Electronics | 63 |
| IEEE Robotics and Automation Letters | 31 |
| 2019 23rd International Conference on System Theory, Control and Computing, ICSTCC 2019—Proceedings | 27 |
| 2019 International Conference on Unmanned Aircraft Systems, ICUAS 2019 | 25 |
| AIAA/IEEE Digital Avionics Systems Conference—Proceedings | 25 |
| Multimedia Tools and Applications | 20 |
| IEEE Transactions on Reliability | 20 |
| Authors | Title | Year | Cited by |
|---|---|---|---|
| Azevedo et al. [115] | LiDAR-based real-time detection and modeling of power lines for unmanned aerial vehicles | 2019 | 56 |
| Siddiqui and Park [135] | A Drone Based Transmission Line Components Inspection System with Deep Learning Technique | 2020 | 35 |
| Iversen et al. [175] | Design, Integration and Implementation of an Intelligent and Self-recharging Drone System for Autonomous Power line Inspection | 2021 | 35 |
| Sun et al. [166] | An industrial quadrotor uav control method based on fuzzy adaptive linear active disturbance rejection control | 2021 | 32 |
| Silano et al. [152] | Power Line Inspection Tasks with Multi-Aerial Robot Systems Via Signal Temporal Logic Specifications | 2021 | 31 |
| Takaya et al. [173] | Development of UAV system for autonomous power line inspection | 2019 | 27 |
| Ayoub and Schneider-Kamp [142] | Real-time on-board deep learning fault detection for autonomous UAV inspections | 2021 | 26 |
| Hamelin et al. [146] | Discrete-time control of LineDrone: An assisted tracking and landing UAV for live power line inspection and maintenance | 2019 | 25 |
| Vemula and Frye [137] | Mask R-CNN powerline detector: A deep learning approach with applications to a UAV | 2020 | 25 |
| Cantieri et al. [180] | Cooperative uav–ugv autonomous power pylon inspection: An investigation of cooperative outdoor vehicle positioning architecture | 2020 | 23 |
| Description | Keywords | Total Link Strength | Occurrences |
|---|---|---|---|
| Cluster 1 (Red): 13 Keywords | aircraft detection | 208 | 29 |
| convolutional neural networks | 49 | 6 | |
| deep learning | 152 | 21 | |
| defects | 37 | 4 | |
| fault detection | 36 | 6 | |
| image processing | 63 | 7 | |
| inspection methods | 21 | 3 | |
| learning systems | 63 | 6 | |
| line detection | 34 | 4 | |
| manual inspection | 33 | 4 | |
| neural networks | 24 | 3 | |
| power line detection | 39 | 4 | |
| signal detection | 27 | 3 | |
| Cluster 2 (Green): 12 Keywords | air navigation | 33 | 4 |
| cameras | 31 | 5 | |
| data handling | 19 | 3 | |
| electric power transmission networks | 139 | 18 | |
| image enhancement | 25 | 4 | |
| inspection | 266 | 38 | |
| inspection image | 41 | 4 | |
| power | 51 | 7 | |
| power line inspections | 319 | 54 | |
| power lines | 252 | 39 | |
| transmission line | 84 | 11 | |
| vehicle transmissions | 50 | 6 | |
| Cluster 3 (Blue): 9 Keywords | antennas | 296 | 44 |
| flight control systems | 24 | 5 | |
| image segmentation | 25 | 4 | |
| inspection and maintenance | 17 | 3 | |
| maintenance | 27 | 4 | |
| mapping | 18 | 3 | |
| robotics | 34 | 7 | |
| semantic segmentation | 50 | 7 | |
| unmanned aerial vehicles | 396 | 67 | |
| Cluster 4 (Yellow): 6 Keywords | aerial vehicle | 84 | 10 |
| deep reinforcement learning | 17 | 3 | |
| inspection process | 22 | 3 | |
| inspection tasks | 25 | 3 | |
| learning algorithms | 36 | 5 | |
| reinforcement learning | 23 | 3 | |
| Cluster 5 (Purple): 4 Keywords | object recognition | 40 | 5 |
| object detection | 54 | 6 | |
| outages | 19 | 3 | |
| power supply company | 27 | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mendu, B.; Mbuli, N. State-of-the-Art Review on the Application of Unmanned Aerial Vehicles (UAVs) in Power Line Inspections: Current Innovations, Trends, and Future Prospects. Drones 2025, 9, 265. https://doi.org/10.3390/drones9040265
Mendu B, Mbuli N. State-of-the-Art Review on the Application of Unmanned Aerial Vehicles (UAVs) in Power Line Inspections: Current Innovations, Trends, and Future Prospects. Drones. 2025; 9(4):265. https://doi.org/10.3390/drones9040265
Chicago/Turabian StyleMendu, Bongumsa, and Nhlanhla Mbuli. 2025. "State-of-the-Art Review on the Application of Unmanned Aerial Vehicles (UAVs) in Power Line Inspections: Current Innovations, Trends, and Future Prospects" Drones 9, no. 4: 265. https://doi.org/10.3390/drones9040265
APA StyleMendu, B., & Mbuli, N. (2025). State-of-the-Art Review on the Application of Unmanned Aerial Vehicles (UAVs) in Power Line Inspections: Current Innovations, Trends, and Future Prospects. Drones, 9(4), 265. https://doi.org/10.3390/drones9040265