
Beyond Conventional Drones: A Review of Unconventional Rotary-Wing UAV Design


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Topological Mechanical Mechanisms: Structural modifications, including unique rotor arrangements, innovative airframe morphologies, and novel configurations of constituent elements.
- Flight Control Principles: Utilization of distinct aerodynamic models and control strategies, such as the integration of fixed-wing elements to enhance payload capacity, flight efficiency, and stability.
- Task Execution Modes: Operational methods and task execution strategies that differ from traditional systems, enabling multiple motion modes, improved environmental adaptability, and expanded capabilities in complex scenarios.
- Tilted or Tiltable Propeller Design: The rotor tilt angle is adjusted to enhance UAV maneuverability and speed.
- Expanded Mechanical Structure Design: Additional mechanical components are integrated into conventional rotorcraft to expand motion modes or introduce new functionalities.
- Morphing Multirotor Design: The overall UAV shape is adjusted according to specific flight missions or environmental conditions.
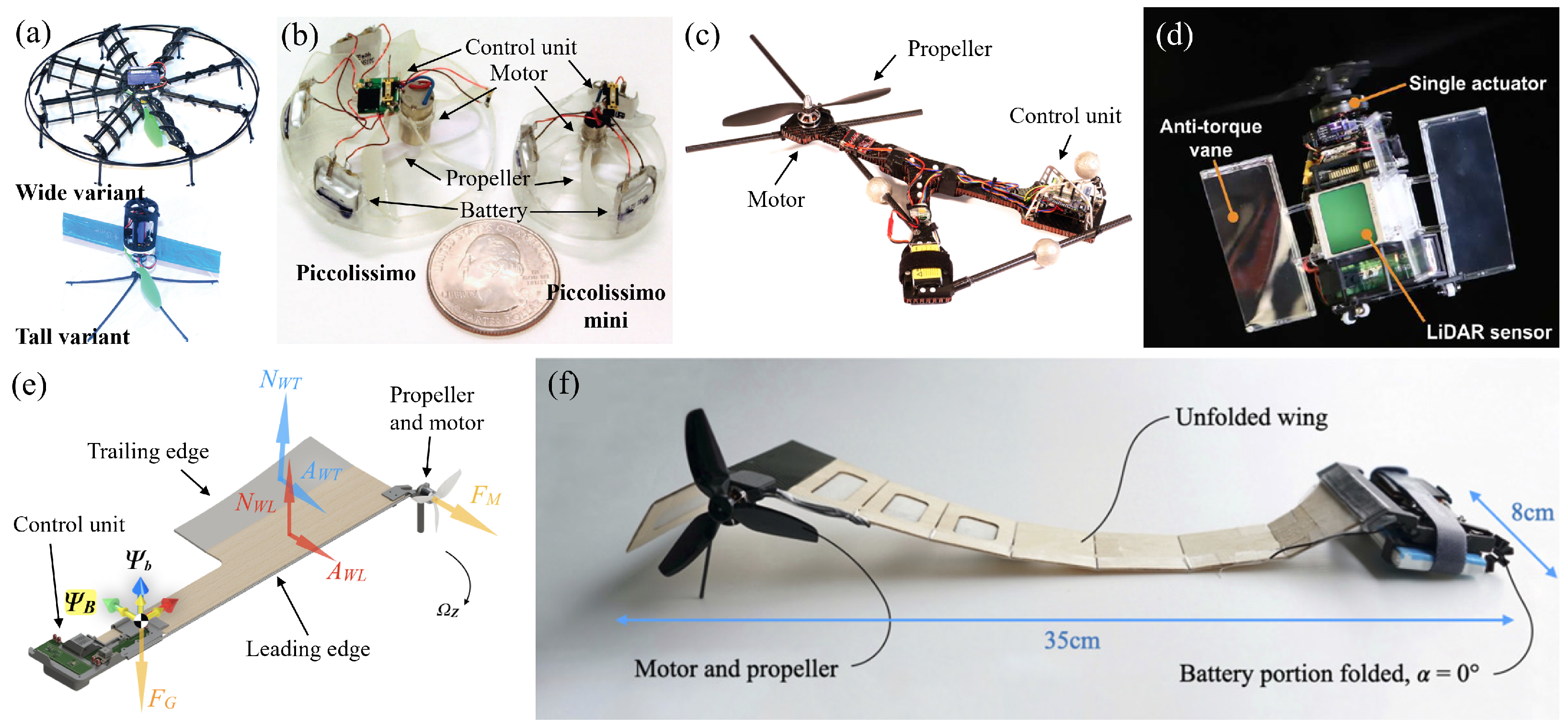
- Revolutionary Design: The UAV configuration is significantly distinct from multirotor designs, characterized by fuselage autorotation, minimal actuator configurations, and/or lifting-wing structures.
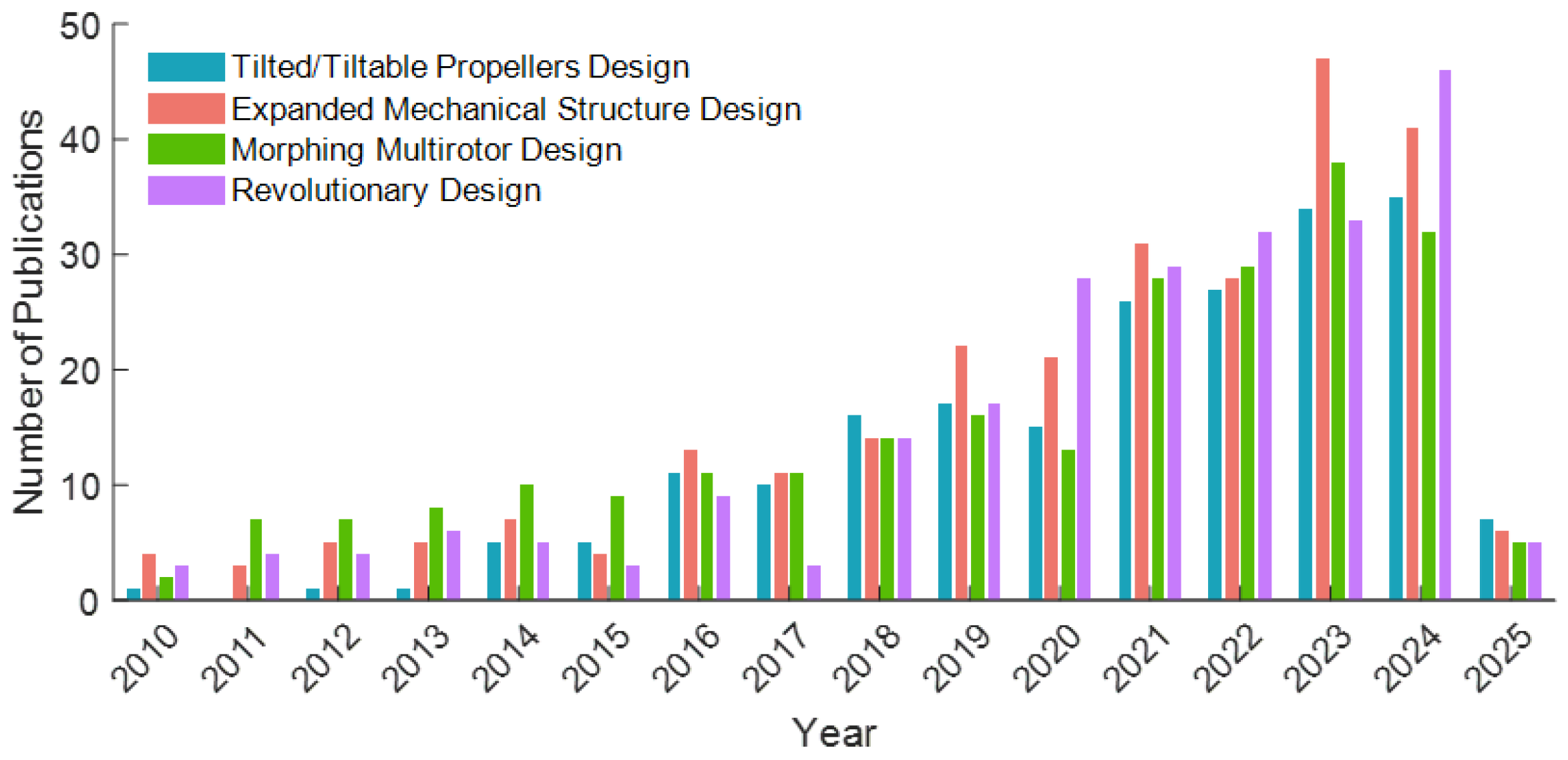
2. Methods of Review
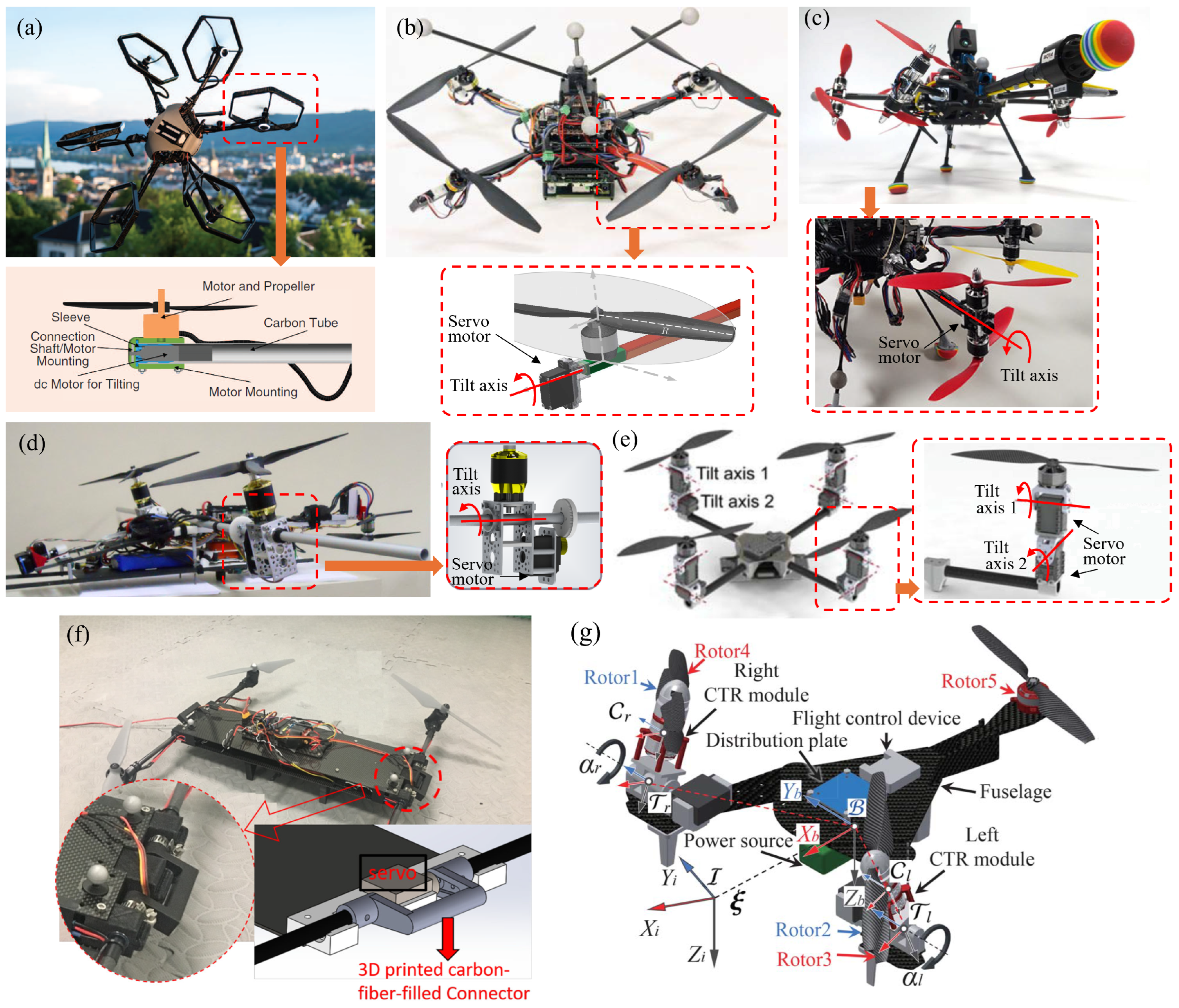
3. Tilted/Tiltable Propellers Design
3.1. Tilted Propellers
3.2. Tiltable Propellers
3.3. Brief Summary
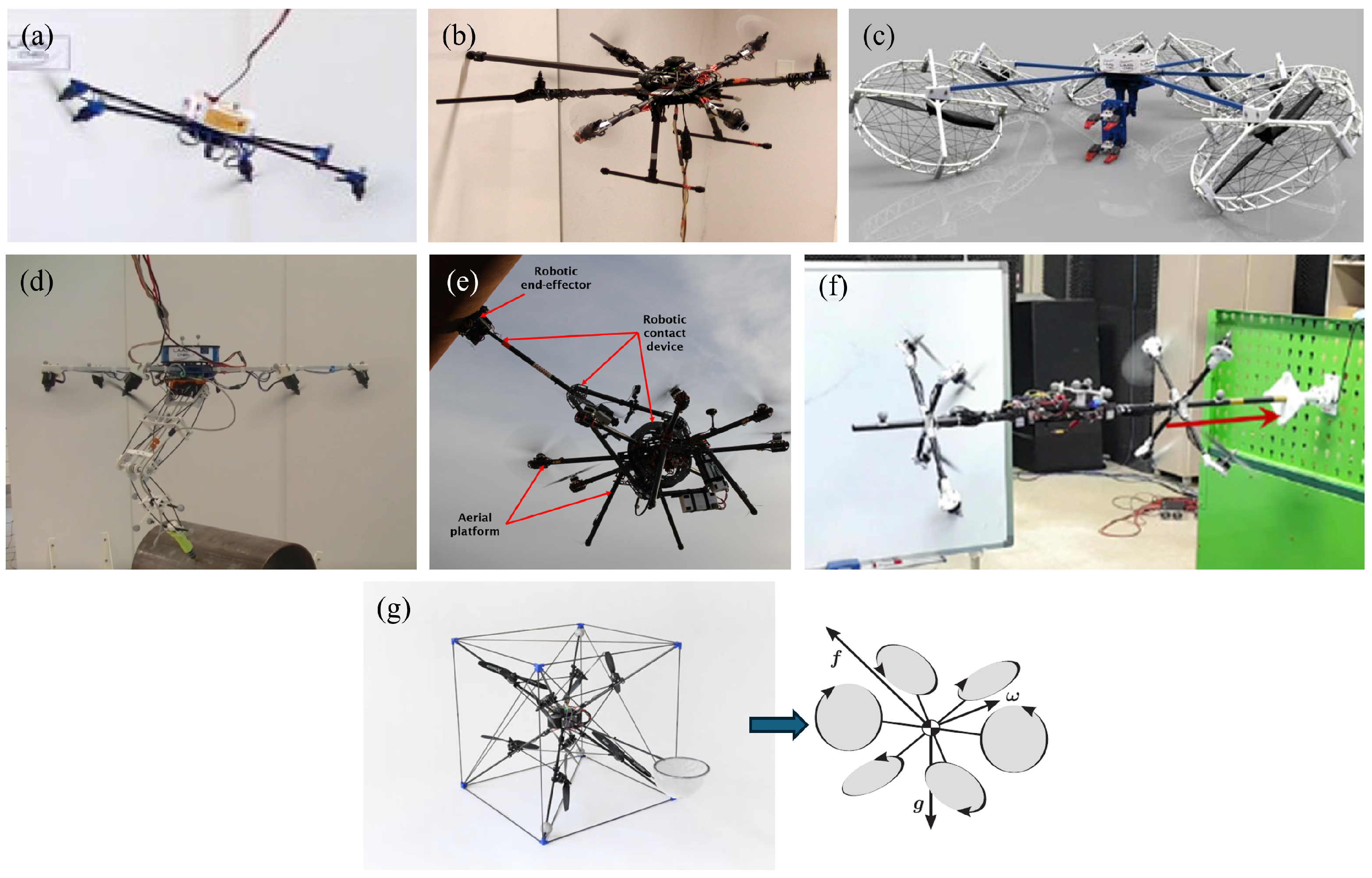
4. Expanded Mechanical Structure Design
4.1. Robotic Arms and Grippers
4.2. Perching Mechanism
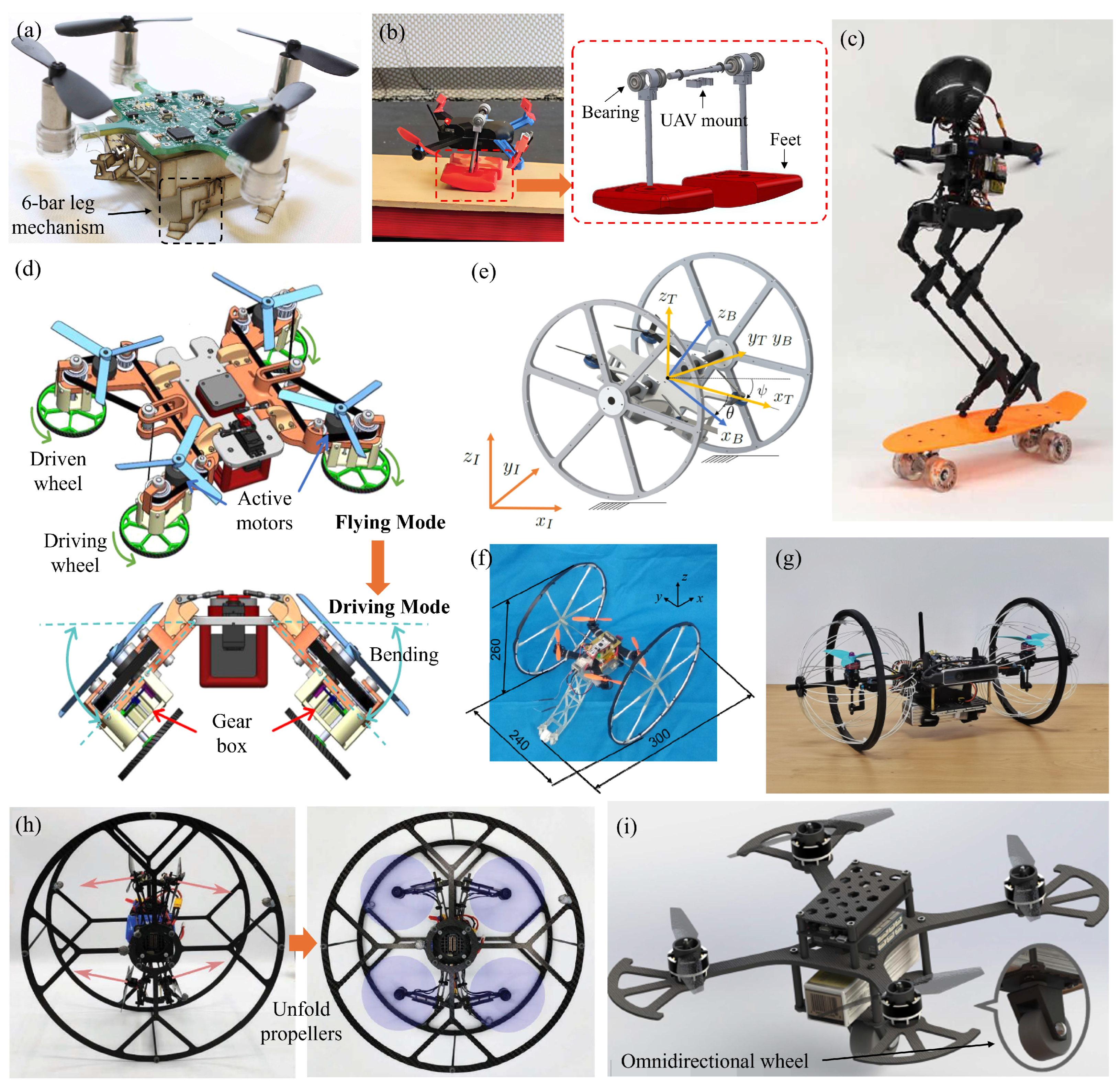
4.3. Locomotion Mechanism
4.4. Brief Summary
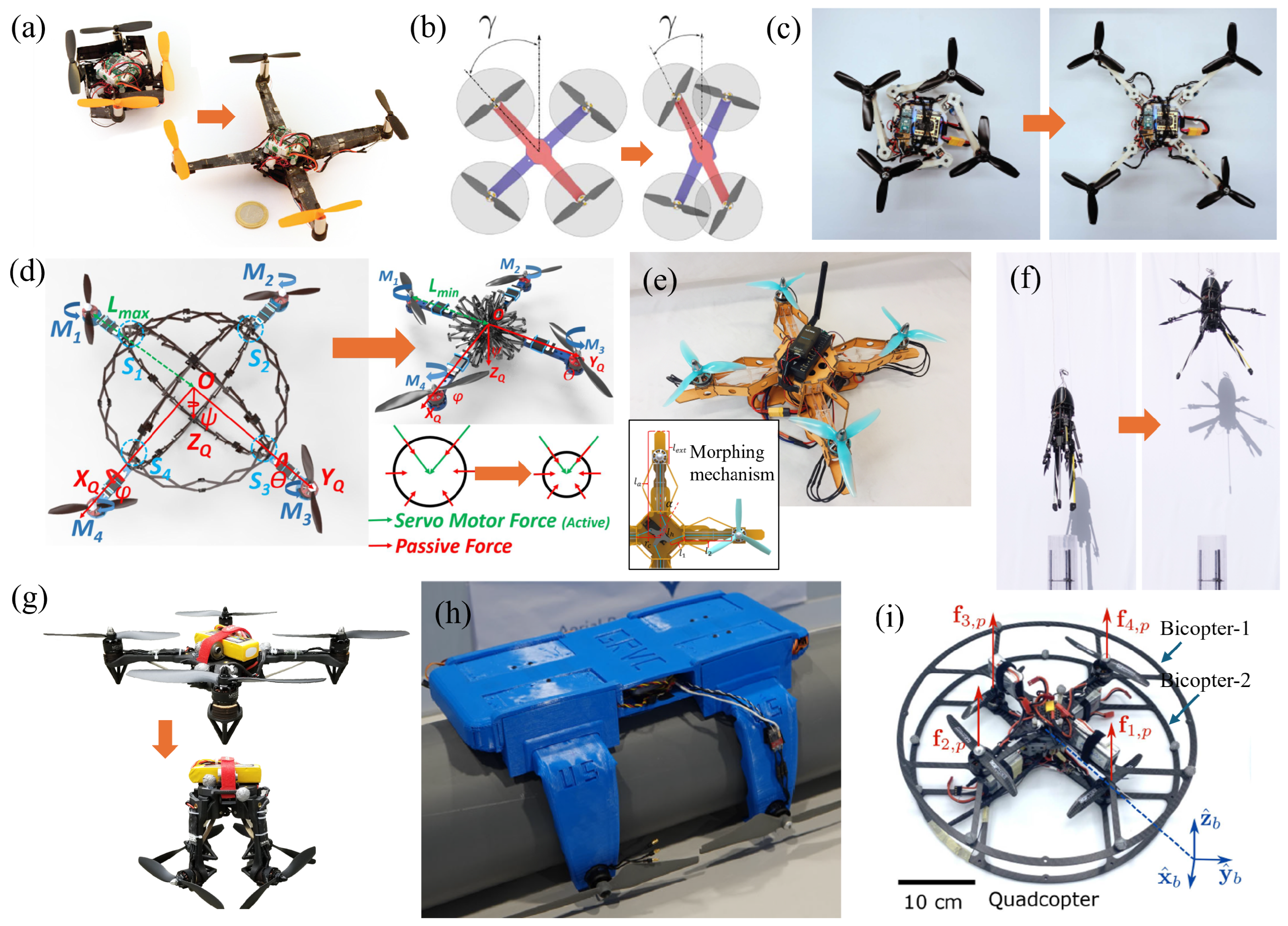
5. Morphing Multirotor Design
5.1. Frame-Morphing Multirotor
5.2. Brief Summary
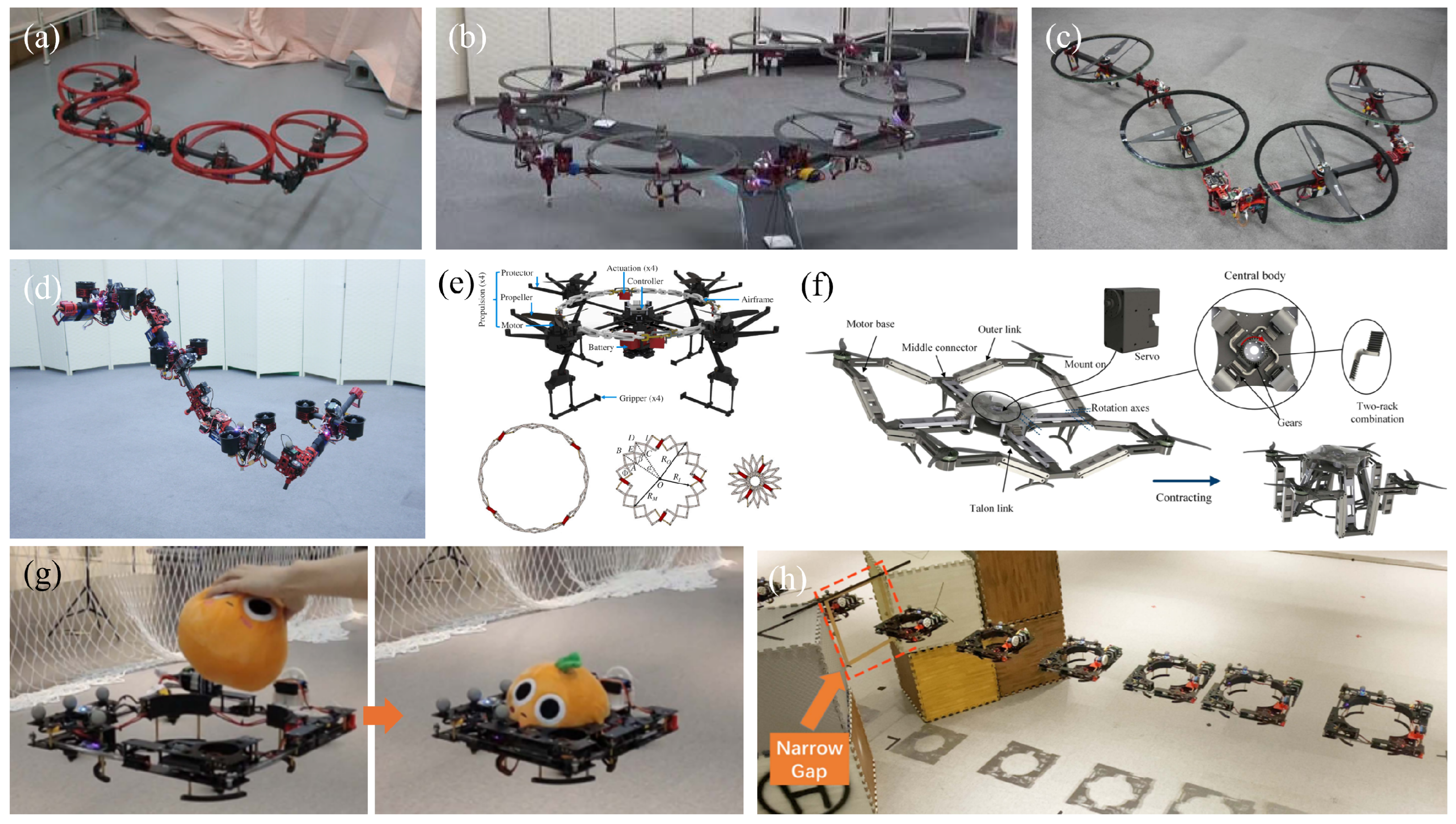
5.3. Linkage-Morphing Multirotor
- A multilink structure interconnected by joints, enabling frame reconfiguration through adjustments in linkage lengths, angles, or connections.
- Task-specific adaptability, such as expanding/collapsing linkages or adjusting angles/positions, to navigate confined spaces or switch flight modes.
- Precise control systems and stable flight control to ensure optimal performance during morphological changes.
5.4. Brief Summary
6. Revolutionary Design
6.1. Single-Actuator Design
6.2. Dual/Triple-Actuator Design
6.3. Coaxial Design
6.4. Brief Summary
7. Discussion
7.1. Challenges
7.2. Outlooks
8. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Muda, N.R.S.; Fananadila, B.; Fadilah, M.F. Design and Construction of a Rotary Wing UAV Rotary Wing Anti Jamming Quadcopter Type. Int. J. Res. Publ. Rev. (IJRPR) 2024, 5, 2015–2021. [Google Scholar] [CrossRef]
- Zhao, P.; Li, R.; Wu, P.; Liu, H.; Gao, X.; Deng, Z. Review of Key Technologies of Rotary-Wing Mars UAVs for Mars Exploration. Inventions 2023, 8, 151. [Google Scholar] [CrossRef]
- Özbek, E.; Ekici, S.; Karakoc, T.H. An Evaluation on Landing Gear Configurations of Fixed-Wing, Rotary-Wing, and Hybrid UAVs. In Unmanned Aerial Vehicle Design and Technology; Springer: Cham, Switzerland, 2023; pp. 153–165. [Google Scholar]
- Hong, D.; Lee, S.; Cho, Y.H.; Baek, D.; Kim, J.; Chang, N. Least-energy path planning with building accurate power consumption model of rotary unmanned aerial vehicle. IEEE Trans. Veh. Technol. 2020, 69, 14803–14817. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar] [CrossRef]
- Li, M.; Jia, G.; Li, X.; Qiu, H. Efficient Trajectory Planning for Optimizing Energy Consumption and Completion Time in UAV-Assisted IoT Networks. Mathematics 2023, 11, 4399. [Google Scholar] [CrossRef]
- Long, Y.; Zhao, S.; Gong, S.; Gu, B.; Niyato, D.; Shen, X. AoI-aware Sensing Scheduling and Trajectory Optimization for Multi-UAV-assisted Wireless Backscatter Networks. IEEE Trans. Veh. Technol. 2024, 73, 15440–15455. [Google Scholar] [CrossRef]
- Ramachandran, A.; Sangaiah, A.K. A review on object detection in unmanned aerial vehicle surveillance. Int. J. Cogn. Comput. Eng. 2021, 2, 215–228. [Google Scholar] [CrossRef]
- Tang, G.; Ni, J.; Zhao, Y.; Gu, Y.; Cao, W. A survey of object detection for UAVs based on deep learning. Remote Sens. 2023, 16, 149. [Google Scholar] [CrossRef]
- Sonugür, G. A Review of quadrotor UAV: Control and SLAM methodologies ranging from conventional to innovative approaches. Robot. Auton. Syst. 2023, 161, 104342. [Google Scholar]
- Al-Ali, I.; Zweiri, Y.; AMoosa, N.; Taha, T.; Dias, J.; Senevirtane, L. State of the art in tilt-quadrotors, modelling, control and fault recovery. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2020, 234, 474–486. [Google Scholar] [CrossRef]
- Franchi, A.; Carli, R.; Bicego, D.; Ryll, M. Full-pose tracking control for aerial robotic systems with laterally-bounded input force. IEEE Trans. Robot. 2018, 34, 534–541. [Google Scholar] [CrossRef]
- Rashad, R.; Engelen, J.B.; Stramigioli, S. Energy tank-based wrench/impedance control of a fully-actuated hexarotor: A geometric port-hamiltonian approach. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Ryll, M.; Muscio, G.; Pierri, F.; Cataldi, E.; Antonelli, G.; Caccavale, F.; Bicego, D.; Franchi, A. 6d interaction control with aerial robots: The flying end-effector paradigm. Int. J. Robot. Res. 2019, 38, 1045–1062. [Google Scholar] [CrossRef]
- Staub, N.; Bicego, D.; Sable, Q.; Arellano, V.; Mishra, S.; Franchi, A. Towards a flying assistant paradigm: The othex. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018. [Google Scholar]
- Staub, N.; Mohammadi, M.; Bicego, D.; Delamare, Q.; Yang, H.; Prattichizzo, D.; Giordano, P.R.; Lee, D.; Franchi, A. The tele-magnas: An aerial-ground comanipulator system. IEEE Robot. Autom. Mag. 2018, 25, 66–75. [Google Scholar] [CrossRef]
- Tognon, M.; Chávez, H.A.T.; Gasparin, E.; Sablé, Q.; Bicego, D.; Mallet, A.; Lany, M.; Santi, G.; Revaz, B.; Cortés, J.; et al. A truly-redundant aerial manipulator system with application to push-and-slide inspection in industrial plants. IEEE Robot. Autom. Lett. 2019, 4, 1846–1851. [Google Scholar] [CrossRef]
- Nava, G.; Sable, Q.; Tognon, M.; Pucci, D.; Franchi, A. Direct force feedback control and online multi-task optimization for aerial manipulators. IEEE Robot. Autom. Lett. 2020, 5, 331–338. [Google Scholar] [CrossRef]
- Trujillo, M.; Martinez-de Dios, J.; Martin, C.; Viguria, A.; Ollero, A. Novel aerial manipulator for accurate and robust industrial ndt contact inspection: A new tool for the oil and gas inspection industry. Sensors 2019, 19, 1305. [Google Scholar] [CrossRef]
- Ollero, A.; Siciliano, B. Aerial Robotic Manipulation; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Brescianini, D.; D’Andrea, R. Computationally efficient trajectory generation for fully actuated multirotor vehicles. IEEE Trans. Robot. 2018, 34, 555–571. [Google Scholar] [CrossRef]
- Park, S.; Lee, J.; Ahn, J.; Kim, M.; Her, J.; Yang, G.H.; Lee, D. Odar: Aerial manipulation platform enabling omnidirectional wrench generation. IEEE/ASME Trans. Mechatron. 2018, 23, 1907–1913. [Google Scholar] [CrossRef]
- Ryll, M.; Bulthoff, H.H.; Giordano, P.R. A novel overactuated quadrotor unmanned aerial vehicle: Modeling, control, and experimental validation. IEEE Trans. Control Syst. Technol. 2015, 23, 540–556. [Google Scholar] [CrossRef]
- Kamel, M.; Verling, S.; Elkhatib, O.; Sprecher, C.; Wulkop, P.; Taylor, Z.; Siegwart, R.; Gilitschenski, I. The voliro omniorientational hexacopter: An agile and maneuverable tiltable-rotor aerial vehicle. IEEE Robot. Autom. Mag. 2018, 25, 34–44. [Google Scholar] [CrossRef]
- Hamandi, M.; Usai, F.; Sable, Q.; Staub, N.; Tognon, M.; Franchi, A. Design of multirotor aerial vehicles: A taxonomy based on input allocation. Int. J. Robot. Res. 2021, 40, 1015–1040. [Google Scholar] [CrossRef]
- Papachristos, C.; Alexis, K.; Tzes, A. Dual-authority thrust-vectoring of a tri-ditrotor employing model predictive control. J. Intell. Robot. Syst. 2016, 81, 471–504. [Google Scholar] [CrossRef]
- Bodie, K.; Brunner, M.; Pantic, M.; Walser, S.; Pfindler, P.; Angst, U.; Siegwart, R.; Nieto, J. An omnidirectional aerial manipulation platform for contact-based inspection. In Proceedings of the Robotics: Science and Systems XV, Breisgau, Germany, 22–26 June 2019. [Google Scholar]
- Bodie, K.; Brunner, M.; Pantic, M.; Walser, S.; Pfandler, P.; Angst, U.; Siegwart, R.; Nieto, J. Active interaction force control for contact-based inspection with a fully actuated aerial vehicle. IEEE Trans. Robot. 2021, 37, 709–722. [Google Scholar] [CrossRef]
- Ding, C.; Lu, L. A tilting-rotor unmanned aerial vehicle for enhanced aerial locomotion and manipulation capabilities: Design, control, and applications. IEEE/ASME Trans. Mechatron. 2020, 26, 2237–2248. [Google Scholar] [CrossRef]
- Singh, K.; Mehndiratta, M.; Feroskhan, M. Quadplus: Design, modeling, and receding-horizon-based control of a hyperdynamic quadrotor. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 1766–1779. [Google Scholar] [CrossRef]
- Lv, Z.Y.; Wu, Y.; Zhao, Q.; Sun, X.M. Design and control of a novel coaxial tilt-rotor UAV. IEEE Trans. Ind. Electron. 2021, 69, 3810–3821. [Google Scholar] [CrossRef]
- Lv, Z.; Zhao, Q.; Sun, X.M.; Wu, Y. Finite-time control design for a coaxial tilt-rotor UAV. IEEE Trans. Ind. Electron. 2024, 71, 16132–16142. [Google Scholar] [CrossRef]
- Pounds, P.E.; Bersak, D.R.; Dollar, A.M. Grasping from the air: Hovering capture and load stability. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2491–2498. [Google Scholar]
- Orsag, M.; Korpela, C.; Bogdan, S.; Oh, P. Valve turning using a dual-arm aerial manipulator. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 836–841. [Google Scholar]
- Yuksel, B.; Mahboubi, S.; Secchi, C.; Bulthoff, H.H.; Franchi, A. Design, identification and experimental testing of a light-weight flexible-joint arm for aerial physical interaction. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 870–876. [Google Scholar]
- Bartelsa, T.; Capra, A.; Hamaza, S.; Stramigioli, S.; Fumagalli, M. Compliant aerial manipulators: Toward a new generation of aerial robotic workers. IEEE Robot. Autom. Lett. 2016, 1, 477–483. [Google Scholar] [CrossRef]
- Suarez, A.; Heredia, G.; Ollero, A. Lightweight compliant arm with compliant finger for aerial manipulation and inspection. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 4449–4454. [Google Scholar]
- Fishman, J.; Ubellacker, S.; Hughes, N.; Carlone, L. Dynamic grasping with a “soft” drone: From theory to practice. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4214–4221. [Google Scholar]
- Zhang, K.; Chermprayong, P.; Xiao, F.; Tzoumanikas, D.; Dams, B.; Kay, S.; Kocer, B.B.; Burns, A.; Orr, L.; Choi, C.; et al. Aerial additive manufacturing with multiple autonomous robots. Nature 2022, 609, 709–717. [Google Scholar] [CrossRef]
- Zhao, N.; Luo, Y.; Wang, G.; Shen, Y. A deployable articulated mechanism enabled in-flight morphing aerial gripper. Mech. Mach. Theory 2022, 167, 104518. [Google Scholar] [CrossRef]
- Hsiao, H.; Sun, J.; Zhang, H.; Zhao, J. A mechanically intelligent and passive gripper for aerial perching and grasping. IEEE/ASME Trans. Mechatron. 2022, 27, 5243–5253. [Google Scholar] [CrossRef]
- Liu, Z.; Mucchiani, C.; Ye, K.; Karydis, K. Safely catching aerial micro-robots in mid-air using an open-source aerial robot with soft gripper. Front. Robot. AI 2022, 9, 1030515. [Google Scholar] [CrossRef]
- Jia, G.; Ding, B.; Li, M. Mathematical derivation and simulational verification for aggressive quadrotor perching control. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 5319–5324. [Google Scholar]
- Maldonado, F.J.; Acosta, J.Á.; Tormo-Barbero, J.; Grau, P.; Guzmán, M.; Ollero, A. Adaptive nonlinear control for perching of a bioinspired ornithopter. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 1385–1390. [Google Scholar]
- Meng, J.; Buzzatto, J.; Liu, Y.; Liarokapis, M. On aerial robots with grasping and perching capabilities: A comprehensive review. Front. Robot. AI 2022, 8, 739173. [Google Scholar] [CrossRef]
- KleinHeerenbrink, M.; France, L.A.; Brighton, C.H.; Taylor, G.K. Optimization of avian perching manoeuvres. Nature 2022, 607, 91–96. [Google Scholar] [CrossRef]
- Hang, K.; Lyu, X.; Song, H.; Stork, J.A.; Dollar, A.M.; Kragic, D.; Zhang, F. Perching and resting—A paradigm for uav maneuvering with modularized landing gears. Sci. Robot. 2019, 4, eaaud657. [Google Scholar] [CrossRef] [PubMed]
- Roderick, W.R.; Cutkosky, M.R.; Lentink, D. Bird-inspired dynamic grasping and perching in arboreal environments. Sci. Robot. 2021, 6, eabj7526. [Google Scholar] [CrossRef]
- Bai, L.; Wang, H.; Chen, X.; Zheng, J.; Xin, L.; Deng, Y.; Sun, Y. Design and experiment of a deformable bird-inspired UAV perching mechanism. J. Bionic Eng. 2021, 18, 1304–1316. [Google Scholar] [CrossRef]
- Bai, L.; Wang, W.; Chen, X.; Sun, Y. Design and control of an autonomous bat-like perching UAV. J. Bionic Eng. 2024, 21, 1253–1264. [Google Scholar] [CrossRef]
- Zheng, P.; Xiao, F.; Nguyen, P.H.; Farinha, A.; Kovac, M. Metamorphic aerial robot capable of mid-air shape morphing for rapid perching. Sci. Rep. 2023, 13, 1297. [Google Scholar] [CrossRef]
- Kominami, T.; Shimonomura, K. Versatile Perching Using a Passive Mechanism with Under Actuated Fingers for Multirotor UAV. IEEE Robot. Autom. Lett. 2024, 9, 11226–11233. [Google Scholar] [CrossRef]
- Lee, D.; Hwang, S.; Byun, J.; Lee, S.J.; Kim, H.J. Autonomous aerial perching and unperching using omnidirectional tiltrotor and switching controller. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 1590–1596. [Google Scholar]
- Mulgaonkar, P.; Araki, B.; Koh, J.s.; Guerrero-Bonilla, L.; Aukes, D.M.; Makineni, A.; Tolley, M.T.; Rus, D.; Wood, R.J.; Kumar, V. The flying monkey: A mesoscale robot that can run, fly, and grasp. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4672–4679. [Google Scholar]
- Pratt, C.J.; Leang, K.K. Dynamic underactuated flying-walking (duck) robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3267–3274. [Google Scholar]
- Kim, K.; Spieler, P.; Lupu, E.S.; Ramezani, A.; Chung, S.J. A bipedal walking robot that can fly, slackline, and skateboard. Sci. Robot. 2021, 6, eabf8136. [Google Scholar] [CrossRef] [PubMed]
- David, N.B.; Zarrouk, D. Design and analysis of fcstar, a hybrid flying and climbing sprawl tuned robot. IEEE Robot. Autom. Lett. 2021, 6, 6188–6195. [Google Scholar] [CrossRef]
- Tanaka, K.; Zhang, D.; Inoue, S.; Kasai, R.; Yokoyama, H.; Shindo, K.; Marumoto, S.; Ishii, H.; Takanishi, A. A design of a small mobile robot with a hybrid locomotion mechanism of wheels and multi-rotors. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 1503–1508. [Google Scholar]
- Zhang, R.; Wu, Y.; Zhang, L.; Xu, C.; Gao, F. Autonomous and adaptive navigation for terrestrial-aerial bimodal vehicles. IEEE Robot. Autom. Lett. 2022, 7, 3008–3015. [Google Scholar] [CrossRef]
- Yang, J.; Zhu, Y.; Zhang, L.; Dong, Y.; Ding, Y. Sytab: A class of smooth-transition hybrid terrestrial/aerial bicopters. IEEE Robot. Autom. Lett. 2022, 7, 9199–9206. [Google Scholar] [CrossRef]
- Jia, H.; Ding, R.; Dong, K.; Bai, S.; Chiarrattananon, P. Quadrollier: A reconfigurable quadrotor with controlled rolling and turning. IEEE Robot. Autom. Lett. 2023, 8, 4052–4059. [Google Scholar] [CrossRef]
- Pan, N.; Jiang, J.; Zhang, R.; Xu, C.; Gao, F. Skywalker: A compact and agile air-ground omnidirectional vehicle. IEEE Robot. Autom. Lett. 2023, 8, 2534–2541. [Google Scholar] [CrossRef]
- Xing, S.; Zhang, X.; Tian, J.; Xie, C.; Chen, Z.; Sun, J. Morphing Quadrotors: Enhancing Versatility and Adaptability in Drone Applications—A Review. Drones 2024, 8, 762. [Google Scholar] [CrossRef]
- Mintchev, S.; Dalert, L.; L’Epidermelo, G.; Saint-Raymond, L.; Floreano, D. Foldable and self-deployable pocket sized quadrotor. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Desbiez, A.; Expert, F.; Boyron, M.; Diperi, J.; Viollet, S.; Ruffier, F. X-morf: A crash-separable quadrotor that morfs its x-geometry in flight. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linköping, Sweden, 3–5 October 2017. [Google Scholar]
- Falanga, D.; Kleber, K.; Mintchev, S.; Floreano, D.; Scaramuzza, D. The foldable drone: A morphing quadrotor that can squeeze and fly. IEEE Robot. Autom. Lett. 2019, 4, 209–216. [Google Scholar] [CrossRef]
- Fabris, A.; Kleber, K.; Falanga, D.; Scaramuzza, D. Geometry-aware compensation scheme for morphing drones. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Zhao, N.; Luo, Y.; Deng, H.; Shen, Y. The deformable quad-rotor: Design, kinematics and dynamics characterization, and flight performance validation. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Yang, D.; Mishra, S.; Aukes, D.M.; Zhang, W. Design, planning, and control of an origami-inspired foldable quadrotor. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019. [Google Scholar]
- Bouman, A.; Nadan, P.; Anderson, M.; Pastor, D.; Izraelevitz, J.; Burdick, J.; Kennedy, B. Design and autonomous stabilization of a ballistically launched multirotor. arXiv 2019, arXiv:1911.10269. [Google Scholar]
- Bucki, N.; Mueller, M.W. Design and control of a passively morphing quadcopter. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Bucki, N.; Tang, J.; Mueller, M.W. Design and control of a midair-reconfigurable quadcopter using unactuated hinges. IEEE Trans. Robot. 2022, 39, 539–557. [Google Scholar] [CrossRef]
- Ruiz, F.; Arrue, B.C.; Ollero, A. Sophie: Soft and flexible aerial vehicle for physical interaction with the environment. IEEE Robot. Autom. Lett. 2022, 7, 11086–11093. [Google Scholar] [CrossRef]
- Bai, S.; Tan, S.; Chirantatananon, P. Splitflyer: A modular quadcopter that disassembles into two flying robots. arXiv 2020, arXiv:2007.14862. [Google Scholar]
- Bai, S.; Chirantatananon, P. Splitflyer air: A modular quadcopter that disassembles into two bicopters mid-air. IEEE/ASME Trans. Mechatron. 2022, 27, 4729–4740. [Google Scholar] [CrossRef]
- Xu, M.; De, Q.; Yu, D.; Hu, A.; Liu, Z.; Wang, H. Biomimetic Morphing Quadrotor inspired by Eagle claw for dynamic grasping. IEEE Trans. Robot. 2024, 40, 2513–2528. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, F.; Wang, Z.; Wang, K.; Cao, Y.; Xu, C.; Gao, F. Ring-rotor: A novel retractable ring-shaped quadrotor with aerial grasping and transportation capability. IEEE Robot. Autom. Lett. 2023, 8, 2126–2133. [Google Scholar] [CrossRef]
- Kawasaki, K.; Motegi, Y.; Zhao, M.; Okada, K.; Inaba, M. Dual connected bi-copter with new wall trace locomotion feasibility that can fly at arbitrary tilt angle. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Riviere, V.; Mancey, A.; Viollet, S. Agile robotic fliers: A morphing-based approach. Soft Robot. 2018, 5, 541–553. [Google Scholar] [CrossRef] [PubMed]
- Sakaguchi, A.; Takimoto, T.; Ushio, T. A novel quadcopter with a tilting frame using parallel link mechanism. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019. [Google Scholar]
- Tang, J.; Jain, K.P.; Mueller, M.W. Quartm: A quadcopter with unactuated rotor tilting mechanism capable of faster, more agile, and more efficient flight. Front. Robot. AI 2022, 9, 1033715. [Google Scholar] [CrossRef]
- Zhao, M.; Kawasaki, K.; Okada, K.; Inaba, M. Transformable multirotor with two-dimensional multilinks: Modeling, control, and motion planning for aerial transformation. Adv. Robot. 2016, 30, 825–845. [Google Scholar] [CrossRef]
- Anzai, T.; Zhao, M.; Nozawa, S.; Shi, F.; Okada, K.; Inaba, M. Aerial grasping based on shape adaptive transformation by halo: Horizontal plane transformable aerial robot with closed-loop multilinks structure. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018. [Google Scholar]
- Zhao, M.; Anzai, T.; Shi, F.; Chen, X.; Okada, K.; Inaba, M. Design, modeling, and control of an aerial robot dragon: A dual-rotor-embedded multilink robot with the ability of multi-degree-of-freedom aerial transformation. IEEE Robot. Autom. Lett. 2018, 3, 1176–1183. [Google Scholar] [CrossRef]
- Shi, F.; Zhao, M.; Murooka, M.; Okada, K.; Inaba, M. Aerial regrasping: Pivoting with transformable multilink aerial robot. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Houghton, J.; Hoburg, W. Fly-by-Wire Control of a Mono-Copter; Technical Report; Massachusetts Institute of Technology: Cambridge, MA, USA, 2008. [Google Scholar]
- Piccoli, M.; Yim, M. Passive stability of a single actuator micro aerial vehicle. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5510–5515. [Google Scholar]
- Piccoli, M.; Yim, M. Piccolissimo: The smallest micro aerial vehicle. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3328–3333. [Google Scholar]
- Zhang, W.; Mueller, M.W.; D’Andrea, R. A controllable flying vehicle with a single moving part. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3275–3281. [Google Scholar]
- Win, L.S.T.; Win, S.K.H.; Sufiyan, D.; Soh, G.S.; Foong, S. Achieving efficient controlled flight with a single actuator. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–9 July 2020; pp. 1625–1631. [Google Scholar]
- Win, S.K.H.; Win, L.S.T.; Sufiyan, D.; Foong, S. Design and control of the first foldable single-actuator rotary wing micro aerial vehicle. Bioinspir. Biomim. 2021, 16, 066019. [Google Scholar] [CrossRef]
- Chen, N.; Kong, F.; Xu, W.; Cai, Y.; Li, H.; He, D.; Qin, Y.; Zhang, F. A self-rotating, single-actuated uav with extended sensor field of view for autonomous navigation. Sci. Robot. 2023, 8, eade4538. [Google Scholar] [CrossRef]
- Paulos, J.; Yim, M. An underactuated propeller for attitude control in micro air vehicles. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1374–1379. [Google Scholar]
- Paulos, J.; Yim, M. Flight performance of a swashplateless micro air vehicle. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5284–5289. [Google Scholar]
- Win, S.K.H.; Win, L.S.T.; Sufiyan, D.; Soh, G.S.; Foong, S. An agile samara-inspired single-actuator aerial robot capable of autorotation and diving. IEEE Trans. Robot. 2021, 38, 1033–1046. [Google Scholar] [CrossRef]
- Bhardwaj, H.; Cai, X.; Win, S.K.H.; Foong, S. Design, modeling and control of a two flight mode capable single wing rotorcraft with mid-air transition ability. IEEE Robot. Autom. Lett. 2022, 7, 11720–11727. [Google Scholar] [CrossRef]
- Bhardwaj, H.; Cai, X.; Win, L.S.T.; Foong, S. Nature-inspired in-flight foldable rotorcraft. Bioinspir. Biomim. 2023, 18, 046012. [Google Scholar] [CrossRef]
- Bai, S.; He, Q.; Chirantatananon, P. A bioinspired revolving-wing drone with passive attitude stability and efficient hovering flight. Sci. Robot. 2022, 7, eabg5913. [Google Scholar] [CrossRef] [PubMed]
- Kirchgeorg, S.; Aucone, E.; Wenk, F.; Mintchev, S. Design, modeling and control of avocado: A multimodal aerial-tethered robot for tree canopy exploration. IEEE Trans. Robot. 2023, 40, 592–605. [Google Scholar] [CrossRef]
- Lan, T.; Romanello, L.; Kovac, M.; Armanini, S.F.; Kocer, B.B. Aerial tensile perching and disentangling mechanism for long-term environmental monitoring. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 3827–3833. [Google Scholar]
- Low, J.E.; Win, L.T.S.; Shafitul, D.S.B.; Tan, C.H.; Soh, G.S.; Foong, S. Design and dynamic analysis of a transformable hovering rotorcraft (thor). In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6389–6396. [Google Scholar]
- Low, J.E.; Win, L.T.S.; Lee, J.L.; Soh, G.S.; Foong, S. Towards a stable three-mode transformable hovering rotorcraft (thor). In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 492–497. [Google Scholar]
- Tan, C.H.; Shafitul, D.S.B.; Tang, E.; Khaw, J.Y.; Soh, G.S.; Foong, S. Flydar: Magnetometer-based high angular rate estimation during gyro saturation for slam. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8532–8537. [Google Scholar]
- Tan, C.H.; Shafitul, D.S.B.; Tang, E.; Soh, G.S.; Foong, S. Flydar: A passive scanning flying lidar sensing system for slam using a single laser. IEEE Sens. J. 2021, 22, 1746–1755. [Google Scholar] [CrossRef]
- Cai, X.; Win, S.K.H.; Win, L.S.T.; Sufiyan, D.; Foong, S. Cooperative modular single actuator monocopters capable of controlled passive separation. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 1989–1995. [Google Scholar]
- Cai, X.; Win, S.K.H.; Bhardwaj, H.; Foong, S. Modeling, control and implementation of adaptive reconfigurable rotary wings (arrows). IEEE/ASME Trans. Mechatron. 2023, 28, 2282–2292. [Google Scholar] [CrossRef]
- Giljarhus, K.E.T.; Porcarelli, A.; Apeland, J. Investigation of rotor efficiency with varying rotor pitch angle for a coaxial drone. Drones 2022, 6, 91. [Google Scholar] [CrossRef]
- Koehl, A.; Rafaralahy, H.; Boutayeb, M.; Martinez, B. Aerodynamic modelling and experimental identification of a coaxial-rotor UAV. J. Intell. Robot. Syst. 2012, 68, 53–68. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, H.; Yang, H.; Tan, S.; Gulliver, T.A.; Lu, T. Trans-domain amphibious unmanned platform based on coaxial counter-propellers: Design and experimental validation. IEEE Access 2021, 9, 149433–149446. [Google Scholar] [CrossRef]
- Wei, Y.r.; Deng, H.b.; Pan, Z.h.; Li, K.w.; Chen, H. Research on a combinatorial control method for coaxial rotor aircraft based on sliding mode. Def. Technol. 2022, 18, 280–292. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z.; Jia, H. Experimental Investigation on Hover Performance of a Ducted Coaxial-Rotor UAV. Sensors 2023, 23, 6413. [Google Scholar] [CrossRef]
- Chen, L.; Xiao, J.; Zheng, Y.; Alagappan, N.A.; Feroskhan, M. Design, modeling, and control of a coaxial drone. IEEE Trans. Robot. 2024, 40, 1650–1663. [Google Scholar] [CrossRef]
- Saravanakumar, Y.N.; Sultan, M.T.H.; Shahar, F.S.; Giernacki, W.; Łukaszewicz, A.; Nowakowski, M.; Holovatyy, A.; Stępień, S. Power sources for unmanned aerial vehicles: A state-of-the art. Appl. Sci. 2023, 13, 11932. [Google Scholar] [CrossRef]
- Liller, J.; Goel, R.; Aziz, A.; Hester, J.; Nguyen, P. Development of a battery free, solar powered, and energy aware fixed wing unmanned aerial vehicle. Sci. Rep. 2025, 15, 6141. [Google Scholar] [CrossRef] [PubMed]
- Maity, R.; Mishra, R.; Pattnaik, P.K.; Pandey, A. Selection of sustainable material for the construction of UAV aerodynamic wing using MCDM technique. Mater. Today Proc. 2023, in press. [Google Scholar] [CrossRef]
- Seo, J.; Paik, J.; Yim, M. Modular reconfigurable robotics. Annu. Rev. Control Robot. Auton. Syst. 2019, 2, 63–88. [Google Scholar] [CrossRef]
- Matthews, D.; Spielberg, A.; Rus, D.; Kriegman, S.; Bongard, J. Efficient automatic design of robots. Proc. Natl. Acad. Sci. USA 2023, 120, e2305180120. [Google Scholar] [CrossRef]
- Gupta, A.; Savarese, S.; Ganguli, S.; Fei-Fei, L. Embodied intelligence via learning and evolution. Nat. Commun. 2021, 12, 5721. [Google Scholar] [CrossRef]
- Budiyono, A.; Higashino, S.I. A review of the latest innovations in uav technology. J. Instrum. Autom. Syst. 2023, 10, 7–16. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M. Beyond Conventional Drones: A Review of Unconventional Rotary-Wing UAV Design. Drones 2025, 9, 323. https://doi.org/10.3390/drones9050323
Li M. Beyond Conventional Drones: A Review of Unconventional Rotary-Wing UAV Design. Drones. 2025; 9(5):323. https://doi.org/10.3390/drones9050323
Chicago/Turabian StyleLi, Mengtang. 2025. "Beyond Conventional Drones: A Review of Unconventional Rotary-Wing UAV Design" Drones 9, no. 5: 323. https://doi.org/10.3390/drones9050323
APA StyleLi, M. (2025). Beyond Conventional Drones: A Review of Unconventional Rotary-Wing UAV Design. Drones, 9(5), 323. https://doi.org/10.3390/drones9050323