
Multifunctional Graphene–Polymer Nanocomposite Sensors Formed by One-Step In Situ Shear Exfoliation of Graphite

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
3. Results and Discussion
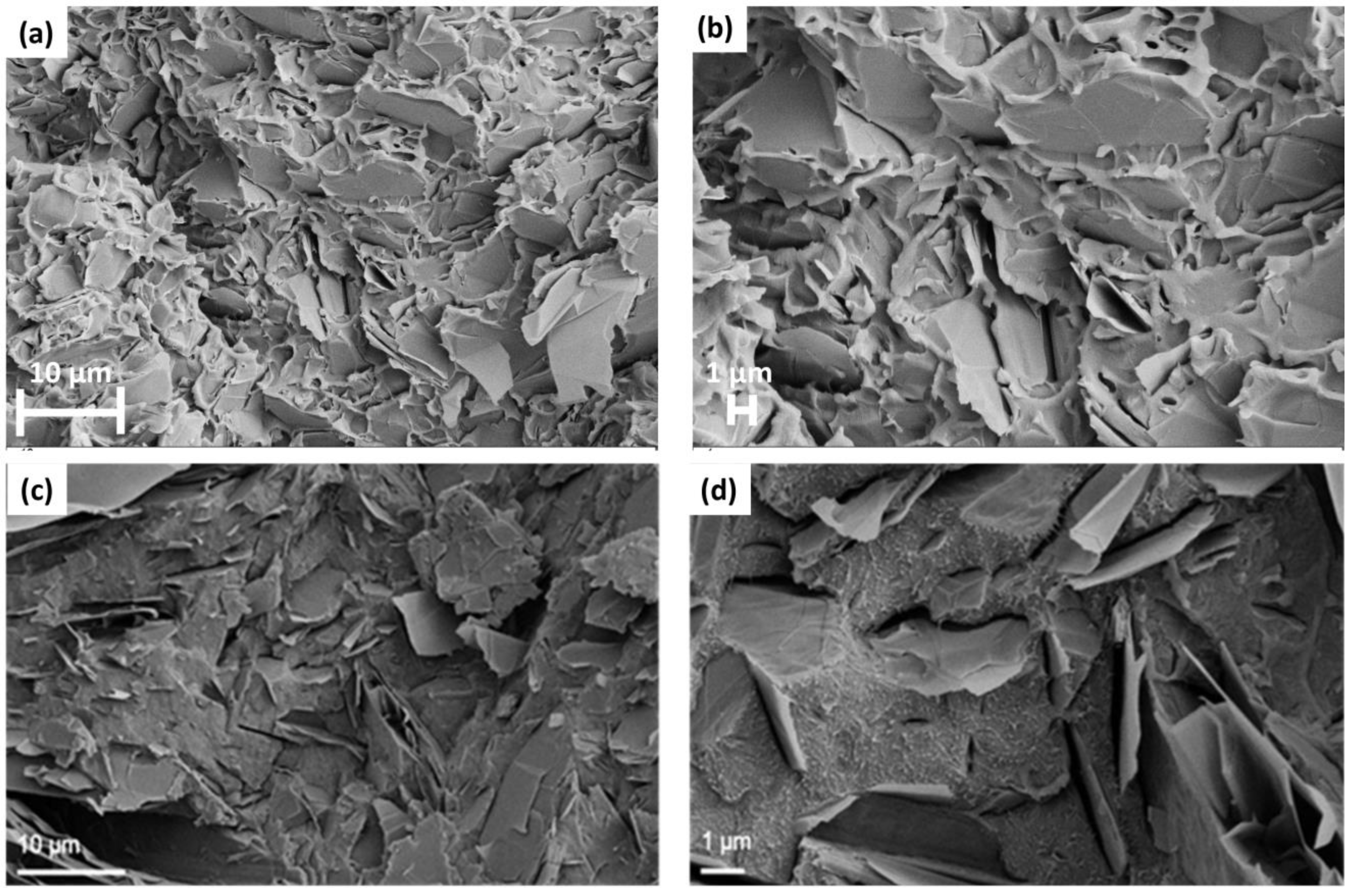
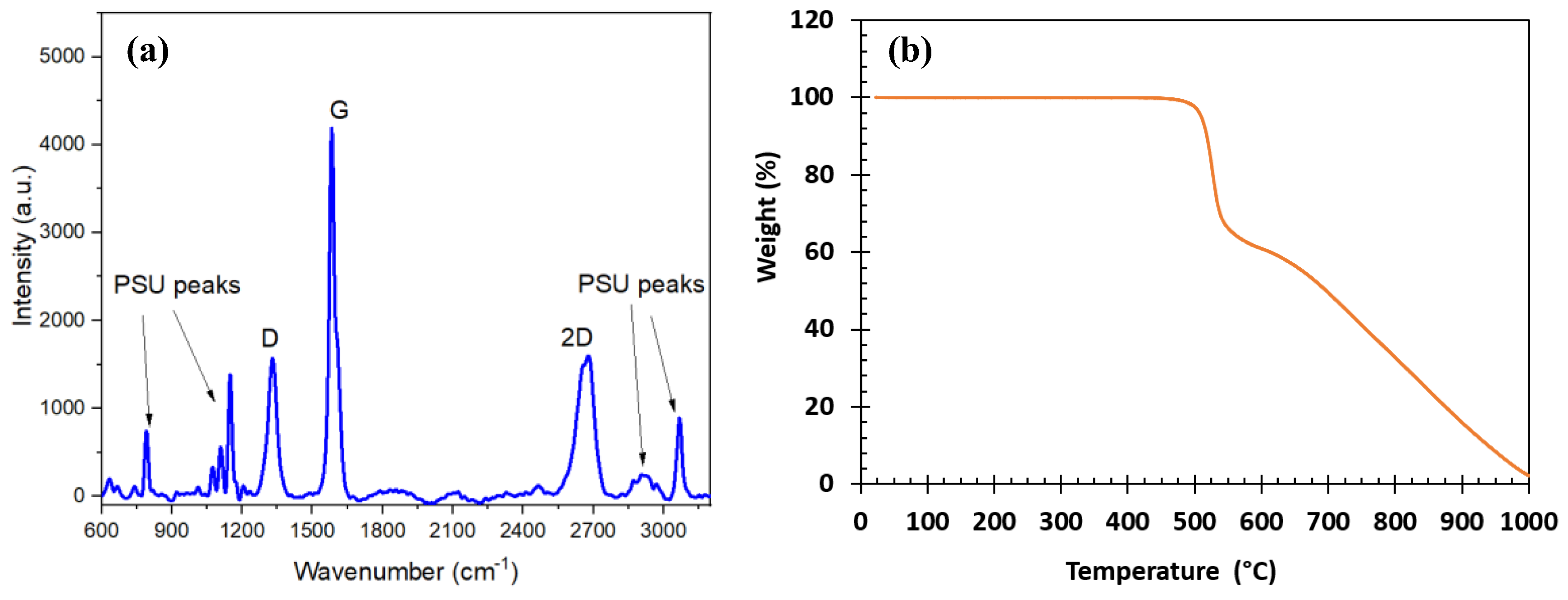
3.1. Material Characterization
3.2. Electromechanical Strain Sensing
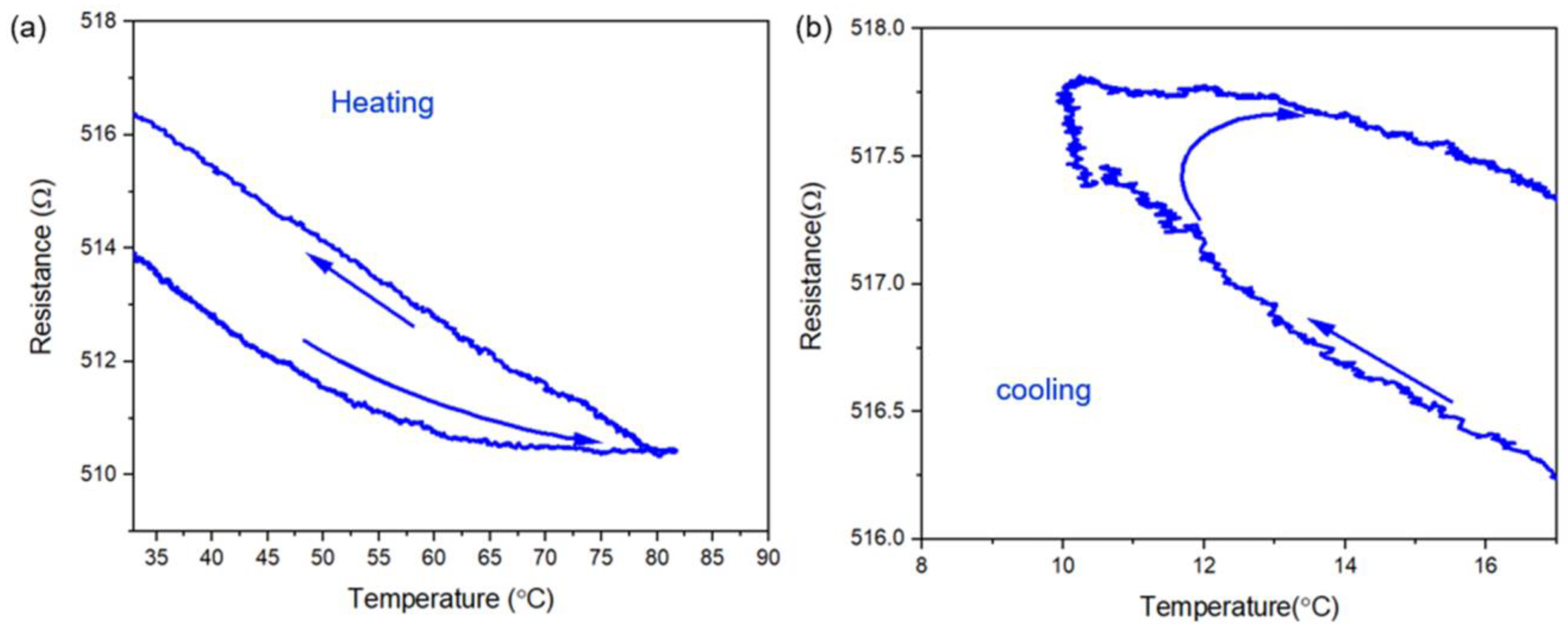
3.3. Temperature Sensing
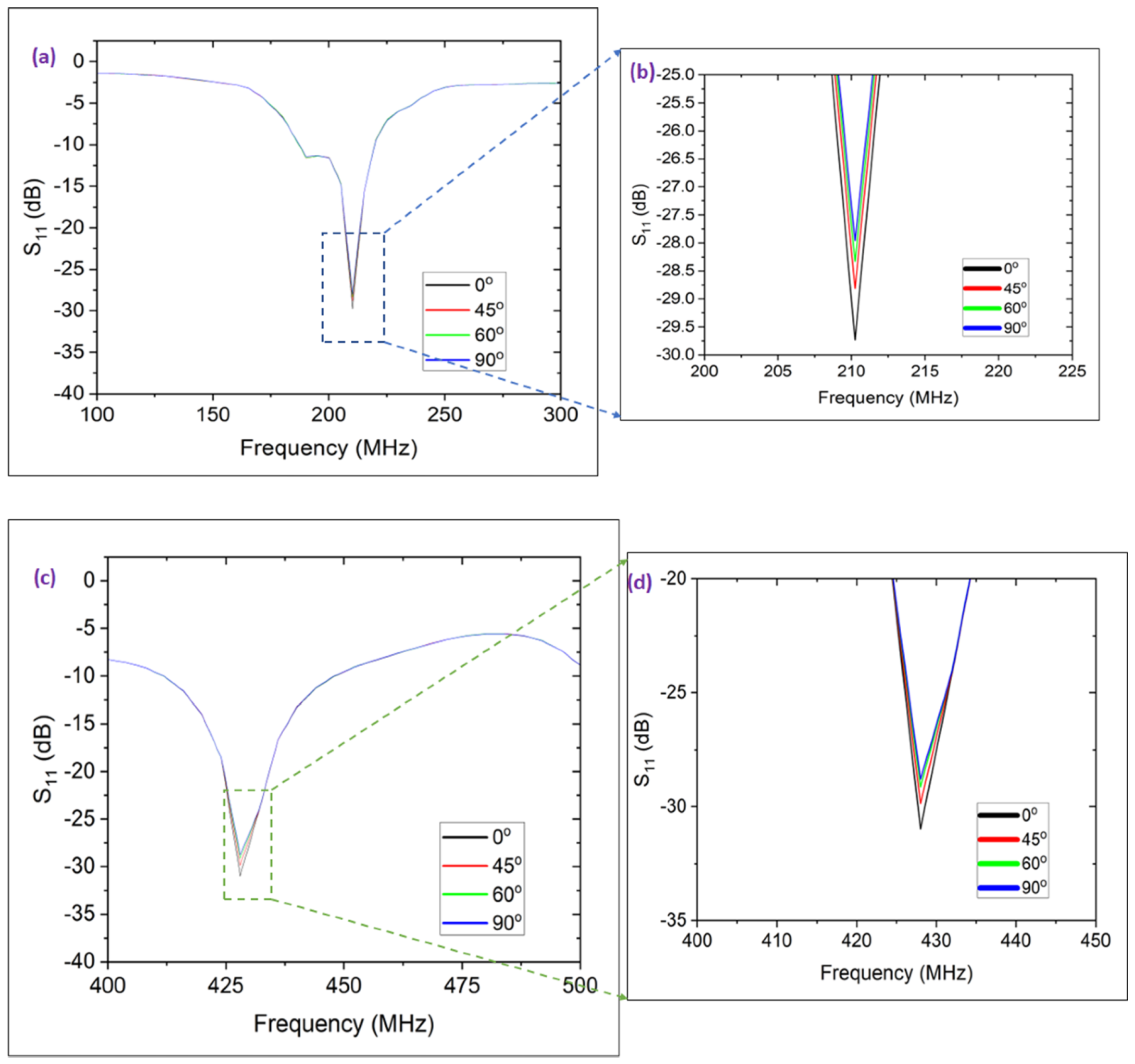
3.4. Wireless Sensing
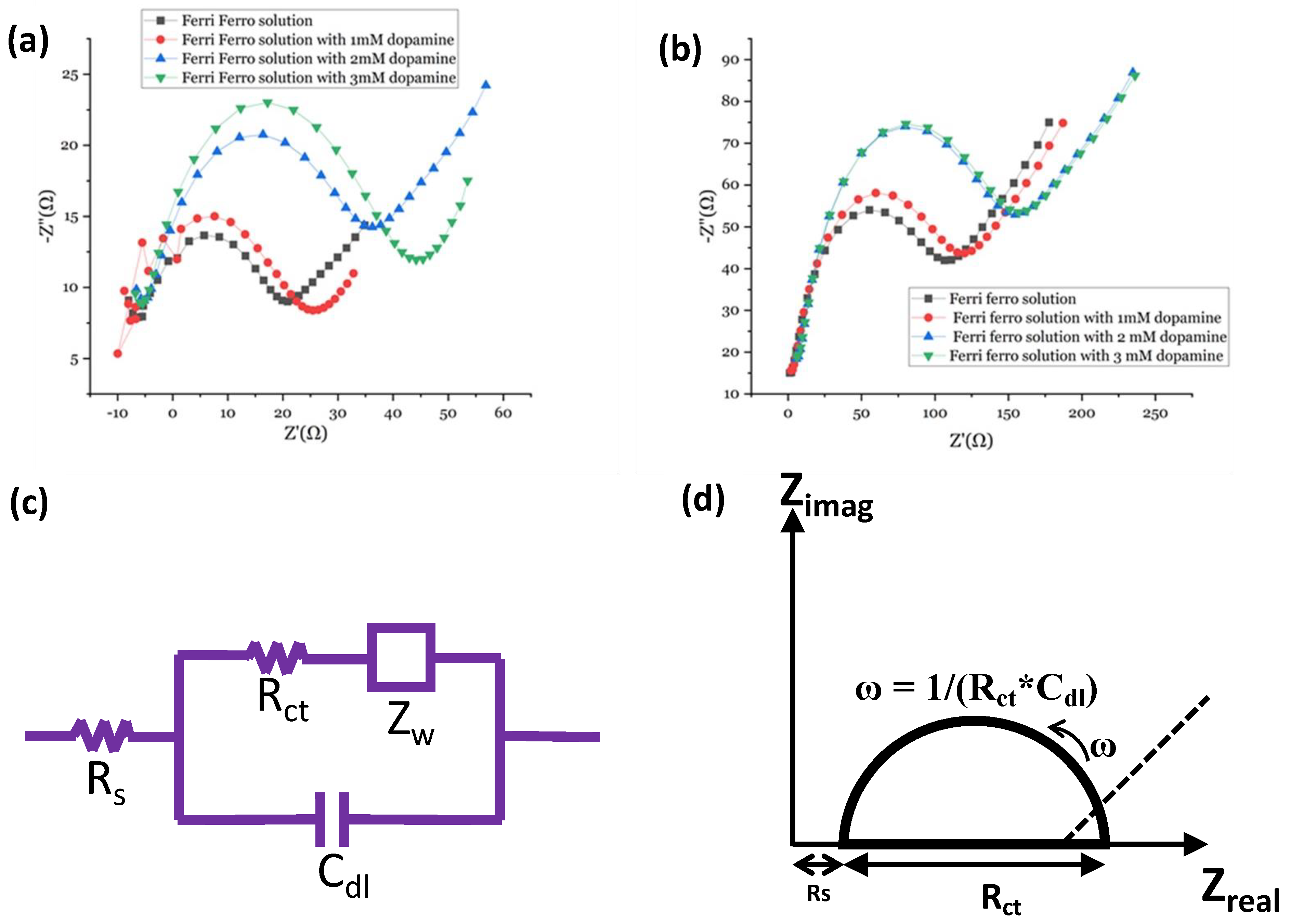
3.5. Electrochemical Sensing
4. Conclusions
5. Patents
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Boland, C.S.; Khan, U.; Backes, C.; O’Neill, A.; McCauley, J.; Duane, S.; Shanker, R.; Liu, Y.; Jurewicz, I.; Dalton, A.B. Sensitive, high-strain, high-rate bodily motion sensors based on graphene–rubber composites. ACS Nano 2014, 8, 8819–8830. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Balaji, R.; Sasikumar, M. Graphene based strain and damage prediction system for polymer composites. Compos. Part A Appl. Sci. Manuf. 2017, 103, 48–59. [Google Scholar] [CrossRef]
- Han, S.; Chand, A.; Araby, S.; Cai, R.; Chen, S.; Kang, H.; Cheng, R.; Meng, Q. Thermally and electrically conductive multifunctional sensor based on epoxy/graphene composite. Nanotechnology 2019, 31, 075702. [Google Scholar] [CrossRef] [PubMed]
- Jang, H.; Park, Y.J.; Chen, X.; Das, T.; Kim, M.S.; Ahn, J.H. Graphene-based flexible and stretchable electronics. Adv. Mater. 2016, 28, 4184–4202. [Google Scholar] [CrossRef]
- Papageorgiou, D.G.; Kinloch, I.A.; Young, R.J. Graphene/elastomer nanocomposites. Carbon 2015, 95, 460–484. [Google Scholar] [CrossRef]
- Sadasivuni, K.K.; Ponnamma, D.; Thomas, S.; Grohens, Y. Evolution from graphite to graphene elastomer composites. Prog. Polym. Sci. 2014, 39, 749–780. [Google Scholar] [CrossRef]
- Liu, F.; Wang, C.; Sui, X.; Riaz, M.A.; Xu, M.; Wei, L.; Chen, Y. Synthesis of graphene materials by electrochemical exfoliation: Recent progress and future potential. Carbon Energy 2019, 1, 173–199. [Google Scholar] [CrossRef] [Green Version]
- Khakpour, I.; Rabiei Baboukani, A.; Allagui, A.; Wang, C. Bipolar exfoliation and in situ deposition of high-quality graphene for supercapacitor application. ACS Appl. Energy Mater. 2019, 2, 4813–4820. [Google Scholar] [CrossRef]
- Nosker, T.J.; Lynch-Branzoi, J.K.; Hendrix, J.W.; Kear, B.H.; Chiu, G.; Tse, S. Covalent Conjugates of Graphene Nanoparticles and Polymer Chains and Composite Materials Formed Therefrom. US 11479652, 25 October 2022. [Google Scholar]
- Nosker, T.J.; Lynch-Branzoi, J.K.; Kear, B.H.; Hendrix, J.W.; Chiu, G. Graphene-reinforced polymer matrix composites. US 11225558, 18 January 2022. [Google Scholar]
- Nosker, T.J.; Lynch-Branzoi, J.K.; Kear, B.H.; Hendrix, J.W.; Chiu, G. In Situ Exfoliation Method to Fabricate a Graphene-Reinforced Polymer Matrix Composites. US 11174366, 16 November 2021. [Google Scholar]
- Nosker, T.; Lynch, J.; Hendrix, J.; Kear, B.; Chiu, G.; Tse, S. In Situ Exfoliation Method to Fabricate A Graphene-Reinforced Polymer Matrix Composite. US 11098175, 24 August 2021. [Google Scholar]
- Nosker, T.; Lynch, J.; Kear, B.; Hendrix, J.; Chiu, G. In Situ Exfoliation Method to Fabricate a Graphene-Reinforced Polymer Matrix Composite. US 10253154, 9 April 2019. [Google Scholar]
- Nosker, T.; Lynch, J.; Hendrix, J.; Kear, B.; Chiu, G.; Tse, S. In situ exfoliation method to fabricate a graphene-reinforced polymer matrix composite (G−PMC). US 9896565, 20 February 2018. [Google Scholar]
- Lynch-Branzoi, J.K.; Nosker, T.J.; Kear, B.H.; Chang, C.T. Use of Graphene-Polymer Composites to Improve Barrier Resistance of Polymers to Liquid and Gas Permeants. US 11479653, 25 October 2022. [Google Scholar]
- Lynch-Branzoi, J.K.; Ashraf, A.; Tewatia, A.; Taghon, M.; Wooding, J.; Hendrix, J.; Kear, B.H.; Nosker, T.J. Shear exfoliation of graphite into graphene nanoflakes directly within polyetheretherketone and a spectroscopic study of this high modulus, lightweight nanocomposite. Compos. Part B Eng. 2020, 188, 107842. [Google Scholar] [CrossRef]
- Ciobanu, M.; Marin, L.; Cozan, V.; Bruma, M. Aromatic polysulfones used in sensor applications. Rev. Adv. Mater. Sci. 2009, 22, 89–96. [Google Scholar]
- Ordóñez, S.S.; Fàbregas, E. New antibodies immobilization system into a graphite–polysulfone membrane for amperometric immunosensors. Biosens. Bioelectron. 2007, 22, 965–972. [Google Scholar] [CrossRef] [PubMed]
- Bautista-Quijano, J.; Avilés, F.; Aguilar, J.; Tapia, A. Strain sensing capabilities of a piezoresistive MWCNT-polysulfone film. Sens. Actuators A Phys. 2010, 159, 135–140. [Google Scholar] [CrossRef]
- Sánchez, S.; Pumera, M.; Cabruja, E.; Fàbregas, E. Carbon nanotube/polysulfone composite screen-printed electrochemical enzyme biosensors. Analyst 2007, 132, 142–147. [Google Scholar] [CrossRef] [PubMed]
- Sánchez, S.; Pumera, M.; Fàbregas, E.; Bartrolí, J.; Esplandiu, M.J. Carbon nanotube/polysulfone soft composites: Preparation, characterization and application for electrochemical sensing of biomarkers. Phys. Chem. Chem. Phys. 2009, 11, 7721–7728. [Google Scholar] [CrossRef]
- Cen-Puc, M.; Pool, G.; Oliva-Avilés, A.; May-Pat, A.; Avilés, F. Experimental investigation of the thermoresistive response of multiwall carbon nanotube/polysulfone composites under heating-cooling cycles. Compos. Sci. Technol. 2017, 151, 34–43. [Google Scholar] [CrossRef]
- He, F.; Fan, J.; Lau, S. Thermal, mechanical, and dielectric properties of graphite reinforced poly (vinylidene fluoride) composites. Polym. Test. 2008, 27, 964–970. [Google Scholar] [CrossRef]
- An, N.; Liu, S.; Fang, C.; Yu, R.; Zhou, X.; Cheng, Y. Preparation and properties of β-phase graphene oxide/PVDF composite films. J. Appl. Polym. Sci. 2015, 132, 41577. [Google Scholar] [CrossRef]
- Boutry, C.M.; Chandrahalim, H.; Streit, P.; Schinhammer, M.; Hänzi, A.C.; Hierold, C. Characterization of miniaturized RLC resonators made of biodegradable materials for wireless implant applications. Sens. Actuators A Phys. 2013, 189, 344–355. [Google Scholar] [CrossRef]
- Kananian, S.; Alexopoulos, G.; Poon, A.S. Robust Wireless Interrogation of Fully-Passive RLC Sensors. IEEE Trans. Circuits Syst. I Regul. Pap. 2022, 69, 1427–1440. [Google Scholar] [CrossRef]
- Li, Y.; Shimizu, H. Toward a stretchable, elastic, and electrically conductive nanocomposite: Morphology and properties of poly [styrene-b-(ethylene-co-butylene)-b-styrene]/multiwalled carbon nanotube composites fabricated by high-shear processing. Macromolecules 2009, 42, 2587–2593. [Google Scholar] [CrossRef]
- Rath, T.; Li, Y. Nanocomposites based on polystyrene-b-poly (ethylene-r-butylene)-b-polystyrene and exfoliated graphite nanoplates: Effect of nanoplatelet loading on morphology and mechanical properties. Compos. Part A Appl. Sci. Manuf. 2011, 42, 1995–2002. [Google Scholar] [CrossRef]
- Rahman, M.A.; Rahman, M.M.; Ashraf, A. Automatic dispersion, defect, curing, and thermal characteristics determination of polymer composites using micro-scale infrared thermography and machine learning algorithm. Sci. Rep. 2023, 13, 2787. [Google Scholar] [CrossRef]
- Ashraf, A.; Jani, N.; Farmer, F.; Lynch-Branzoi, J.K. Non-destructive investigation of dispersion, bonding, and thermal properties of emerging polymer nanocomposites using close-up lens assisted infrared thermography. MRS Adv. 2020, 5, 735–742. [Google Scholar] [CrossRef]
- Backes, C.; Paton, K.R.; Hanlon, D.; Yuan, S.; Katsnelson, M.I.; Houston, J.; Smith, R.J.; McCloskey, D.; Donegan, J.F.; Coleman, J.N. Spectroscopic metrics allow in situ measurement of mean size and thickness of liquid-exfoliated few-layer graphene nanosheets. Nanoscale 2016, 8, 4311–4323. [Google Scholar] [CrossRef] [Green Version]
- Nayak, L.; Rahaman, M.; Khastgir, D.; Chaki, T. Thermal and electrical properties of carbon nanotubes based polysulfone nanocomposites. Polym. Bull. 2011, 67, 1029–1044. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Yang, T.; Li, X.; Zang, X.; Zhu, M.; Wang, K.; Wu, D.; Zhu, H. Wearable and highly sensitive graphene strain sensors for human motion monitoring. Adv. Funct. Mater. 2014, 24, 4666–4670. [Google Scholar] [CrossRef]
- Moriche, R.; Sánchez, M.; Prolongo, S.G.; Jiménez-Suárez, A.; Ureña, A. Reversible phenomena and failure localization in self-monitoring GNP/epoxy nanocomposites. Compos. Struct. 2016, 136, 101–105. [Google Scholar] [CrossRef]
- Acquarelli, C.; Paliotta, L.; Tamburrano, A.; De Bellis, G.; Sarto, M.S. Electro-mechanical properties of multilayer graphene-based polymeric composite obtained through a capillary rise method. Sensors 2016, 16, 1780. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| % Graphite in PVDF | RPM | Shear Rate (1/s) |
|---|---|---|
| 0 | 150 | 1202 |
| 5 | 120 | 962 |
| 10 | 120 | 962 |
| 20 | 200 | 1602 |
| 30 | 15 | 120 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ashraf, A.; Chang, E.; Rahman, M.A.; Ghosh, D.; Islam, N.; Lynch-Branzoi, J.K. Multifunctional Graphene–Polymer Nanocomposite Sensors Formed by One-Step In Situ Shear Exfoliation of Graphite. J. Compos. Sci. 2023, 7, 309. https://doi.org/10.3390/jcs7080309
Ashraf A, Chang E, Rahman MA, Ghosh D, Islam N, Lynch-Branzoi JK. Multifunctional Graphene–Polymer Nanocomposite Sensors Formed by One-Step In Situ Shear Exfoliation of Graphite. Journal of Composites Science. 2023; 7(8):309. https://doi.org/10.3390/jcs7080309
Chicago/Turabian StyleAshraf, Ali, Elizabeth Chang, Md Ashiqur Rahman, Dipannita Ghosh, Nazmul Islam, and Jennifer K. Lynch-Branzoi. 2023. "Multifunctional Graphene–Polymer Nanocomposite Sensors Formed by One-Step In Situ Shear Exfoliation of Graphite" Journal of Composites Science 7, no. 8: 309. https://doi.org/10.3390/jcs7080309