
Design and Development of Complex-Order PI-PD Controllers: Case Studies on Pressure and Flow Process Control




Abstract
1. Introduction
- 1.
- Developing a mathematical model that captures the dynamic reaction of a process plant.
- 2.
- Designing an appropriate complex-order PI-PD controller.
- 3.
- Conducting simulations and experiments to compare its performance with conventional PID controllers.
2. Development of Proposed Controller
2.1. Integer and Fractional-Order PID Controllers
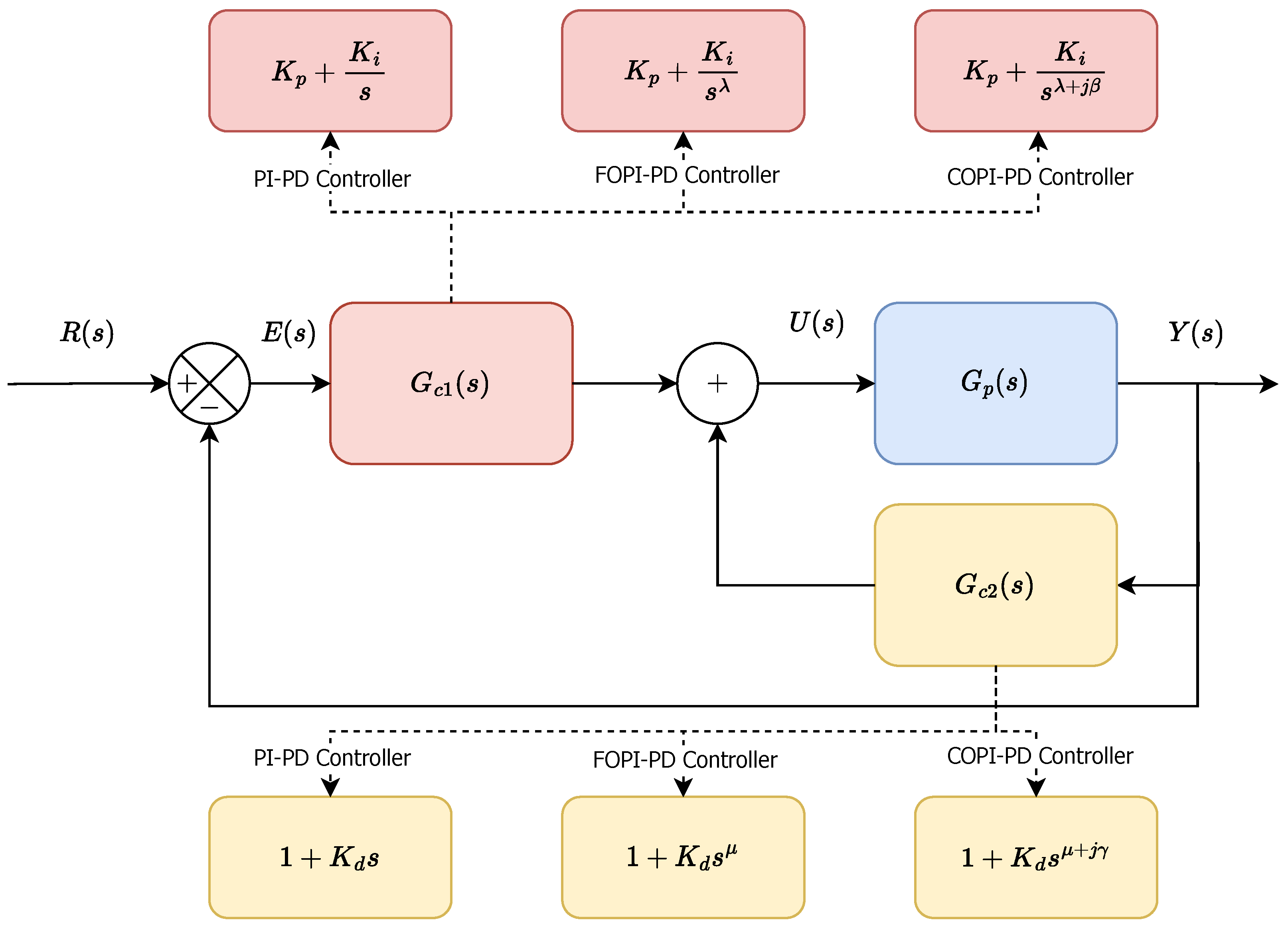
2.2. PI-PD Controller
2.3. Fractional-Order PI-PD Controller
2.4. Proposed Complex-Order PI-PD Controller
2.5. Approximation Technique
- Choose the range of and the order N.
- Using MATLAB built-in command frd, compute the frequency response magnitude data of for the chosen range as stated in Equation (7).
- Perform a fit of the frequency response magnitude data for the selected order using the MATLAB built-in command fitmagfrd obtained in the previous step.
- Convert the state-space model obtained in the previous step to a transfer function model.
3. Results and Discussions
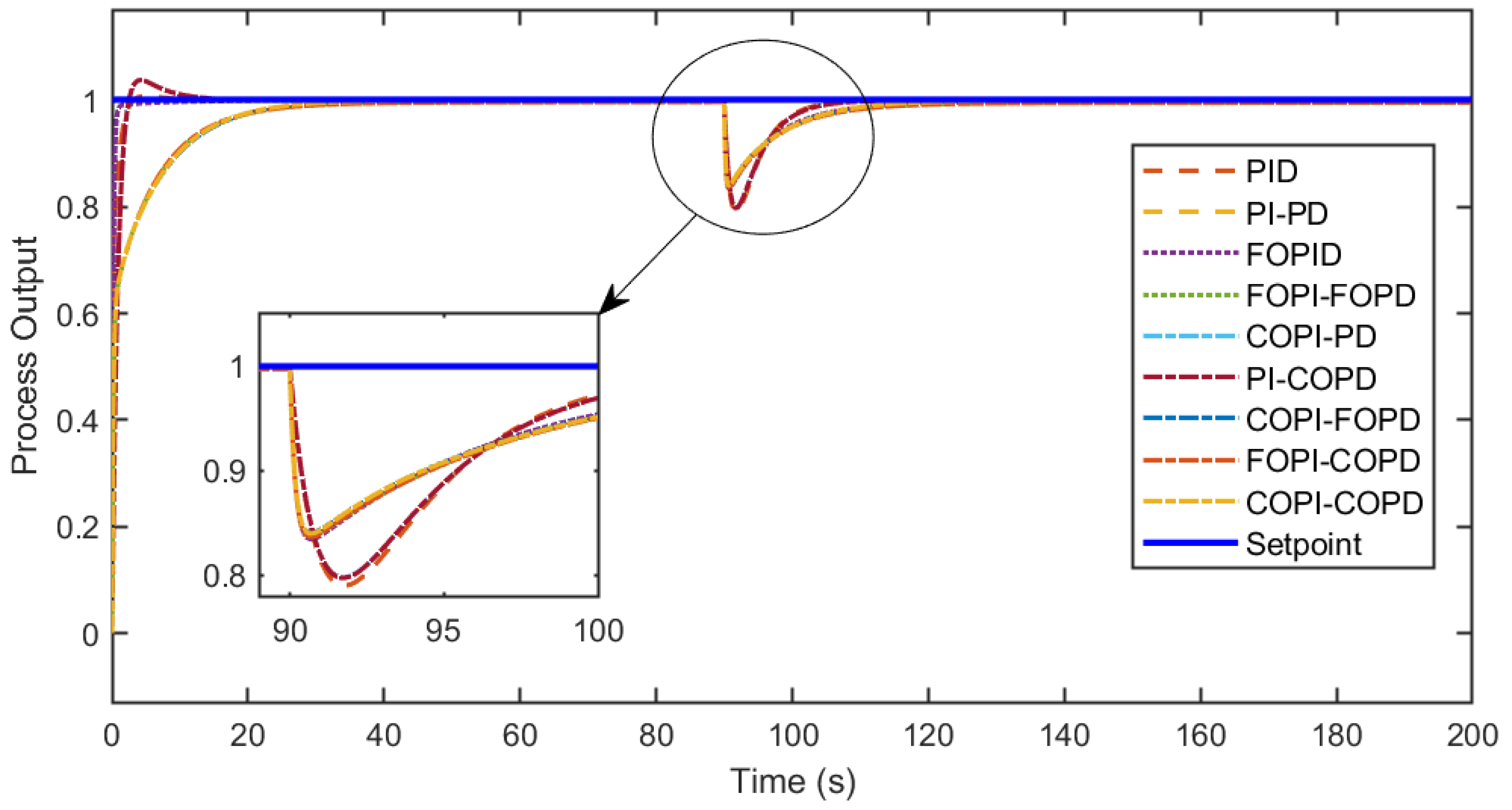
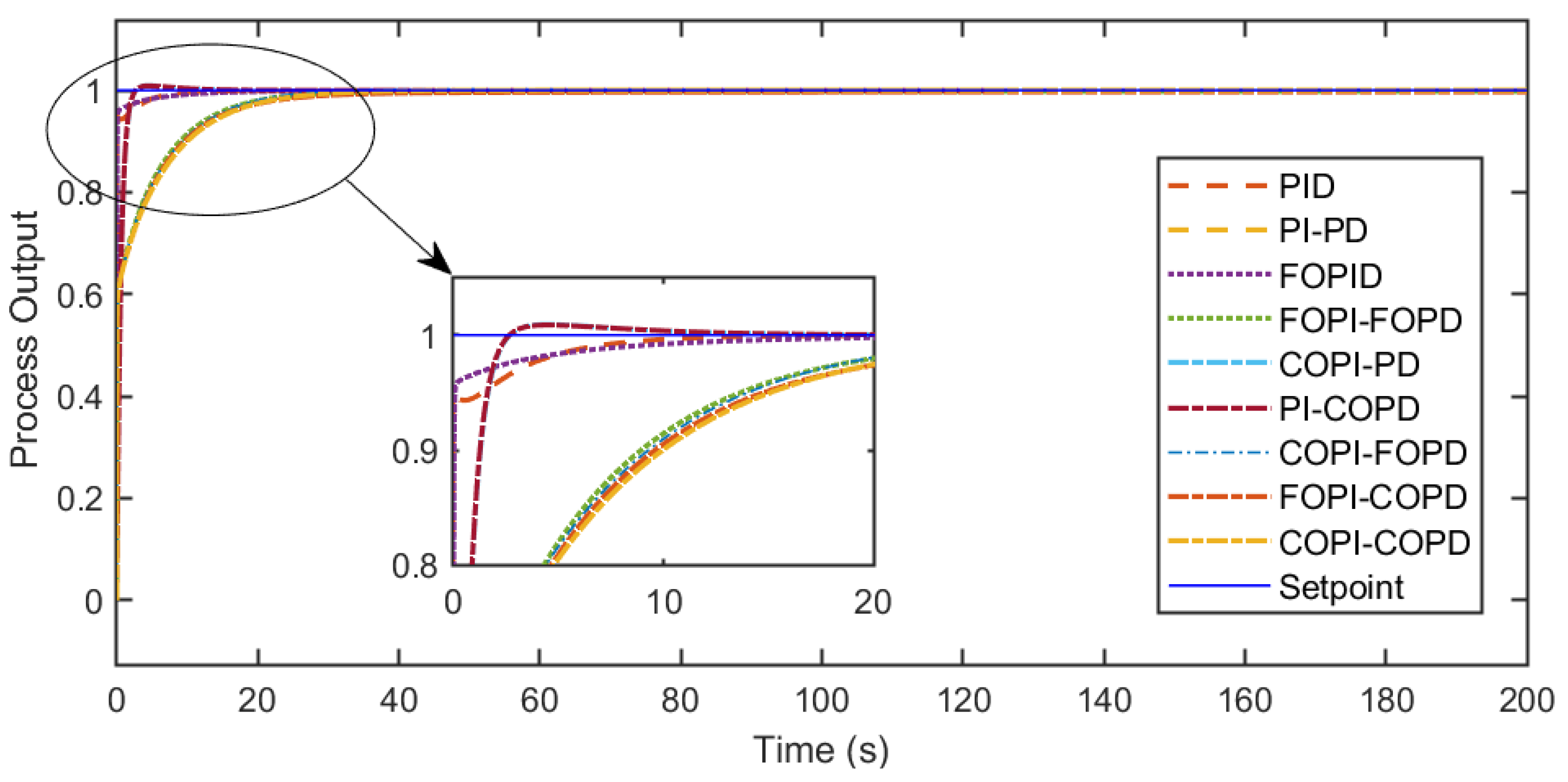
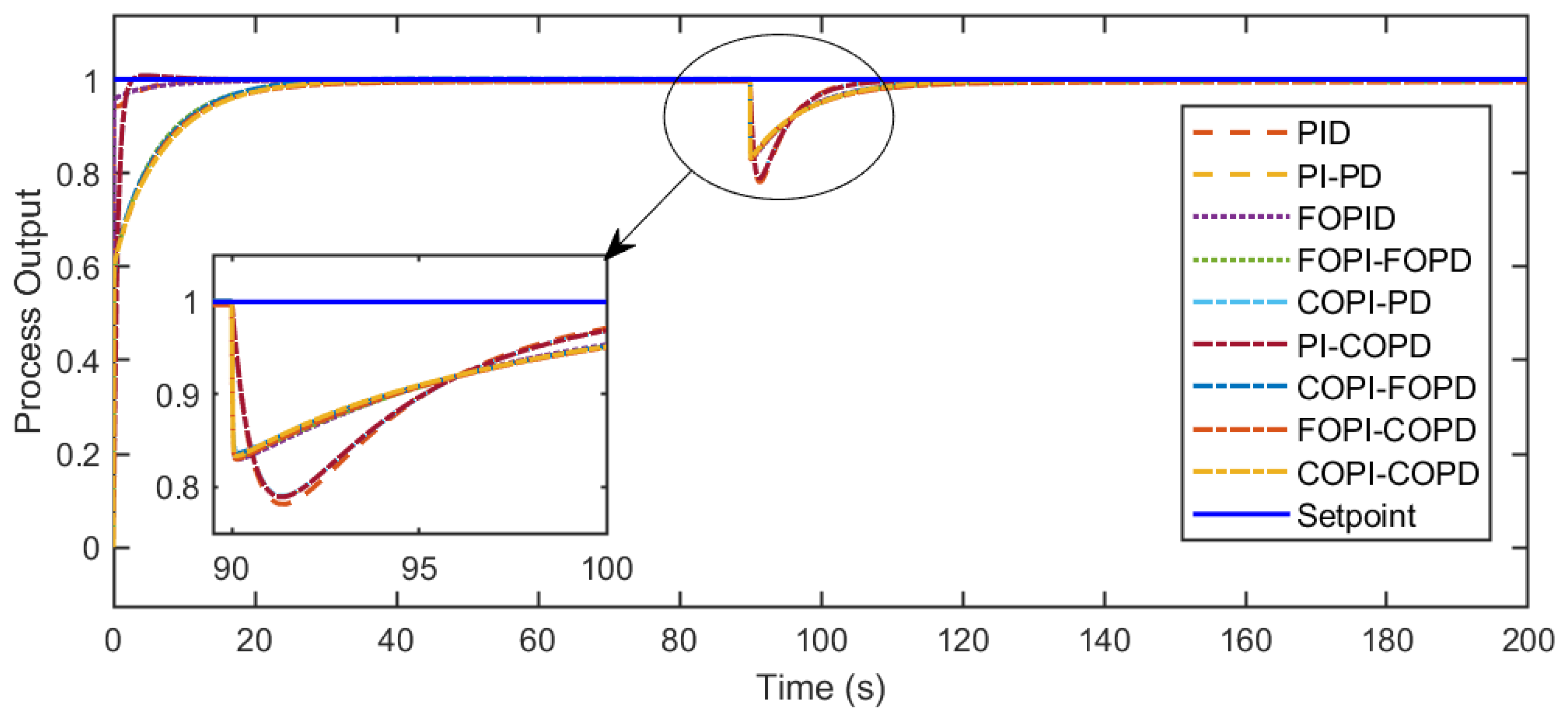
3.1. Simulation Study
3.1.1. First-Order Process Model
3.1.2. Second-Order Process Model
3.1.3. Third-Order Process Model
3.2. Experimental Study
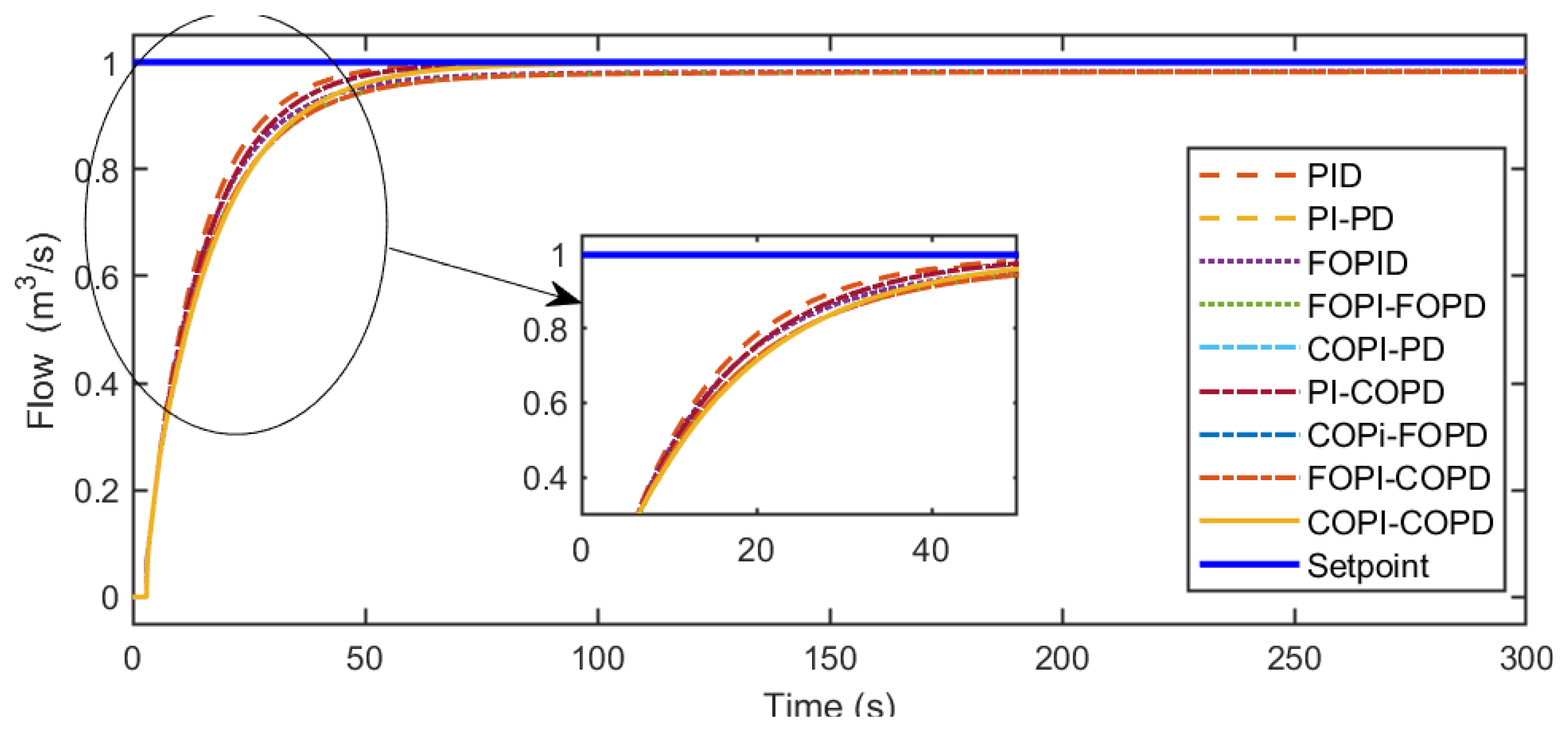
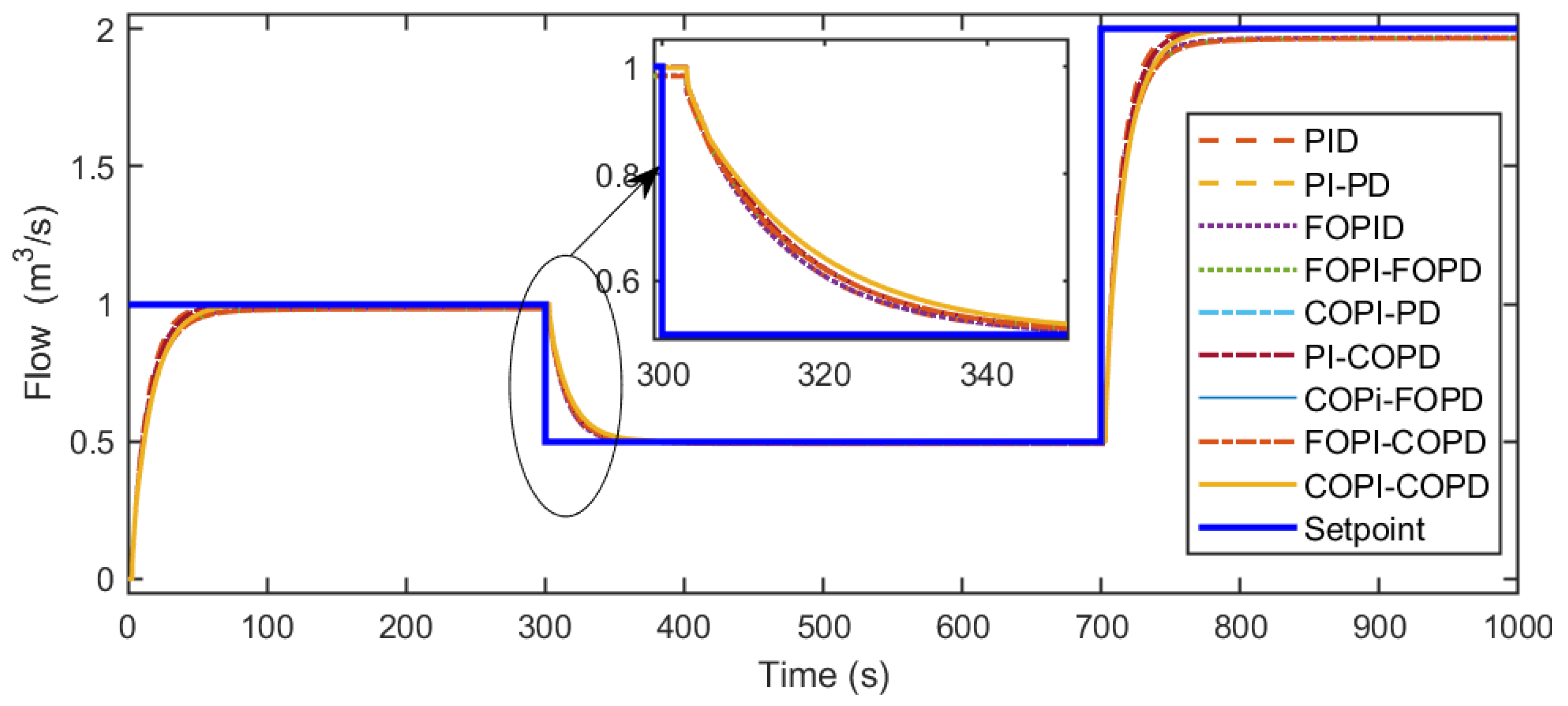
3.2.1. Flow Process Model
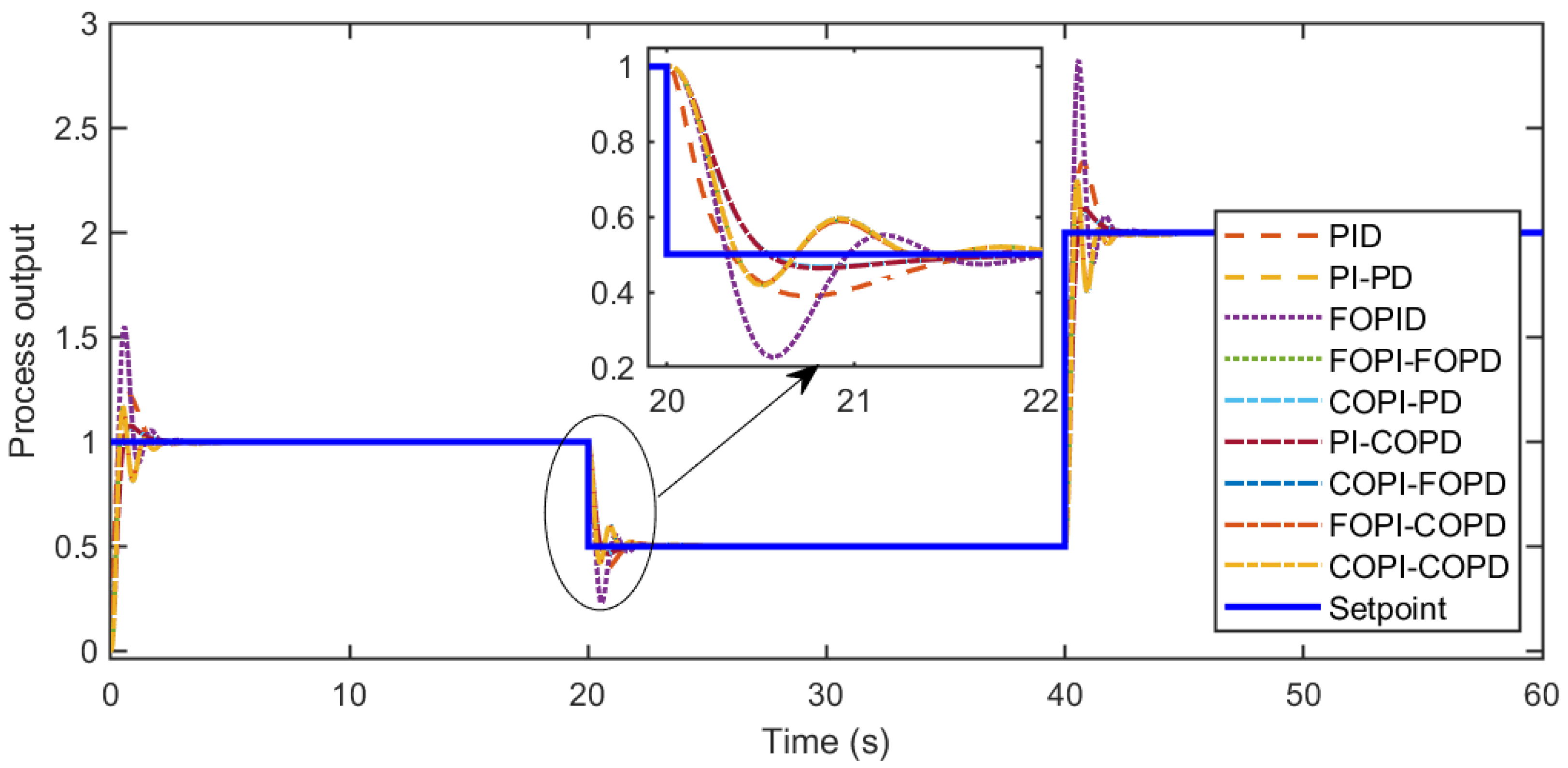
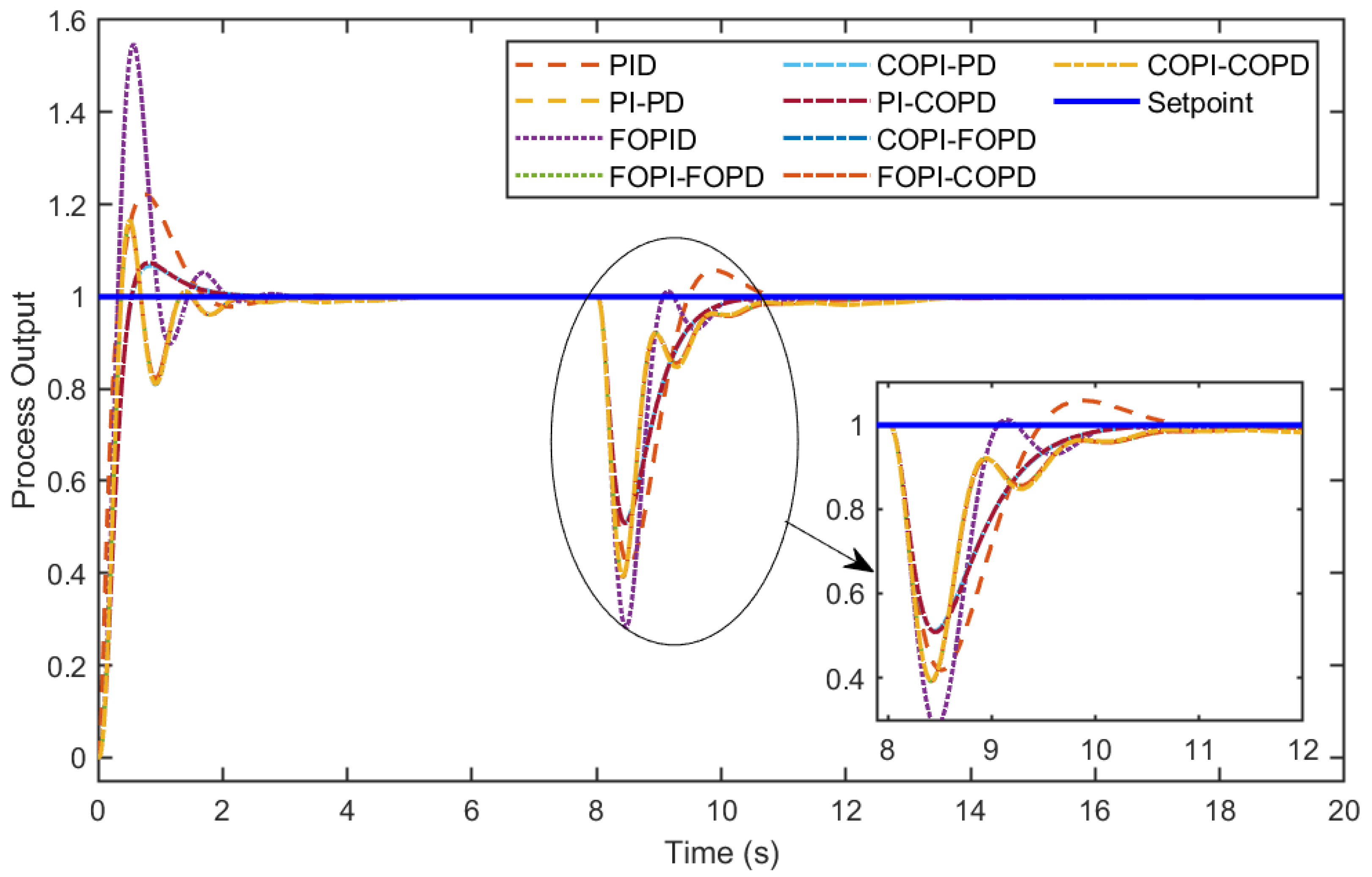
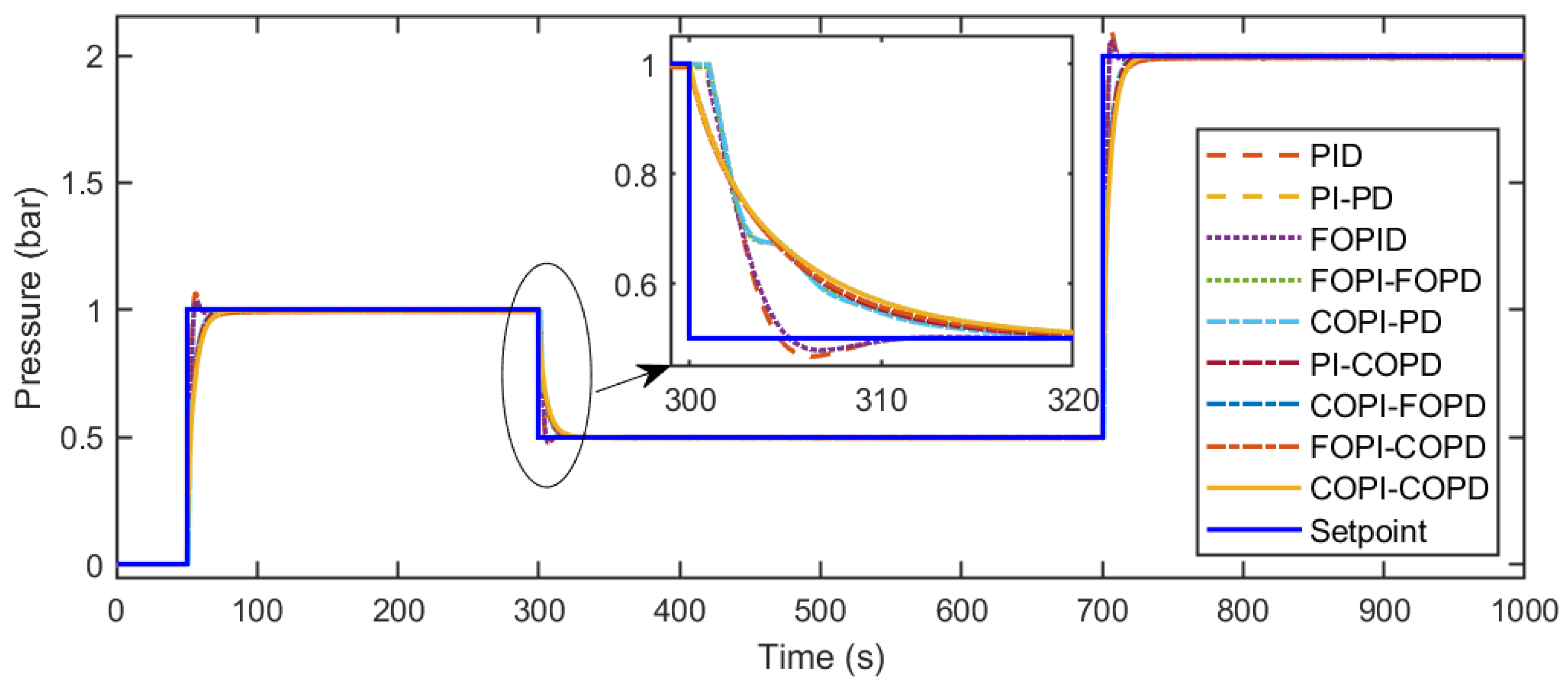
3.2.2. Pressure Process Model
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lloyds Raja, G.; Ali, A. New PI-PD controller design strategy for industrial unstable and integrating processes with dead time and inverse response. J. Control Autom. Electr. Syst. 2021, 32, 266–280. [Google Scholar] [CrossRef]
- Onat, C. A new design method for PI–PD control of unstable processes with dead time. ISA Trans. 2019, 84, 69–81. [Google Scholar] [CrossRef] [PubMed]
- Du, X.; Wang, J.; Jegatheesan, V.; Shi, G. Dissolved oxygen control in activated sludge process using a neural network-based adaptive PID algorithm. Appl. Sci. 2018, 8, 261. [Google Scholar] [CrossRef]
- Feng, Y.; Wu, M.; Chen, X.; Chen, L.; Du, S. A fuzzy PID controller with nonlinear compensation term for mold level of continuous casting process. Inf. Sci. 2020, 539, 487–503. [Google Scholar] [CrossRef]
- Bingi, K.; Ibrahim, R.; Noh Karsiti, M.; Miya Hassan, S. Fractional-order PI-PD control of real-time pressure process. Prog. Fract. Differ. Appl. 2020, 6, 289–299. [Google Scholar]
- George, M.A.; Elwakil, A.S.; Allagui, A.; Psychalinos, C. Design of Complex-Order PI/PID Speed Controllers and its FPAA Realization. IEEE Access 2023. [Google Scholar] [CrossRef]
- Bao, Y.; Cheng, P.; Pham, K.; Blasch, E.; Shen, D.; Tian, X.; Chen, G. PID-based automatic gain control for satellite transponder under partial-time partial-band AWGN jamming. In Proceedings of the Sensors and Systems for Space Applications XVI, Orlando, FL, USA, 30 April–5 May 2023; SPIE: Bellingham, WA, USA, 2023; Volume 12546, pp. 61–68. [Google Scholar]
- Das, D.; Chakraborty, S.; Raja, G.L. Enhanced dual-DOF PI-PD control of integrating-type chemical processes. Int. J. Chem. React. Eng. 2022. [Google Scholar] [CrossRef]
- Peker, F.; Kaya, I. Identification and real time control of an inverted pendulum using PI-PD controller. In Proceedings of the 2017 IEEE 21st International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 19–21 October 2017; pp. 771–776. [Google Scholar]
- Muresan, C.I.; Copot, C.; Birs, I.; De Keyser, R.; Vanlanduit, S.; Ionescu, C.M. Experimental validation of a novel auto-tuning method for a fractional order PI controller on an UR10 robot. Algorithms 2018, 11, 95. [Google Scholar] [CrossRef]
- Xu, L.; Song, B.; Cao, M.; Xiao, Y. A new approach to optimal design of digital fractional-order PIλDμ controller. Neurocomputing 2019, 363, 66–77. [Google Scholar] [CrossRef]
- Dash, P.; Saikia, L.C.; Sinha, N. Flower pollination algorithm optimized PI-PD cascade controller in automatic generation control of a multi-area power system. Int. J. Electr. Power Energy Syst. 2016, 82, 19–28. [Google Scholar] [CrossRef]
- Mondal, R.; Dey, J. A novel design methodology on cascaded fractional order (FO) PI-PD control and its real time implementation to Cart-Inverted Pendulum System. ISA Trans. 2022, 130, 565–581. [Google Scholar] [CrossRef] [PubMed]
- Devan, P.; Hussin, F.A.; Ibrahim, R.B.; Bingi, K.; Nagarajapandian, M.; Assaad, M. An arithmetic-trigonometric optimization algorithm with application for control of real-time pressure process plant. Sensors 2022, 22, 617. [Google Scholar] [CrossRef] [PubMed]
- Padhy, S.; Panda, S. A hybrid stochastic fractal search and pattern search technique based cascade PI-PD controller for automatic generation control of multi-source power systems in presence of plug in electric vehicles. CAAI Trans. Intell. Technol. 2017, 2, 12–25. [Google Scholar] [CrossRef]
- Shanthini, C.; Devi, V.K.; Rajendran, S.; Jena, D. Comparative analysis of PID, I-PD and fractional order PI-PD for a DC-DC converter. In Proceedings of the 2022 IEEE North Karnataka Subsection Flagship International Conference (NKCon), Vijayapura, India, 20–21 November 2022; pp. 1–5. [Google Scholar]
- Singh, V.K.; Sharma, S.; Padhy, P.K. Controlling of AVR Voltage and Speed of DC Motor Using Modified PI-PD Controller. In Proceedings of the 2018 2nd IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 22–24 October 2018; pp. 858–863. [Google Scholar]
- Singh, V.K.; Padhy, P. A new approach to PI-PD controller Design using modified relay feedback. In Proceedings of the 2018 International Conference on Power Energy, Environment and Intelligent Control (PEEIC), Greater Noida, India, 13–14 April 2018; pp. 349–353. [Google Scholar]
- Muresan, C.I.; Dulf, E.H.; Both, R. Vector-based tuning and experimental validation of fractional-order PI/PD controllers. Nonlinear Dyn. 2016, 84, 179–188. [Google Scholar] [CrossRef]
- Roong, A.S.C.; Shin-Homg, C.; Said, M.A.B. Position control of a magnetic levitation system via a PI-PD control with feedforward compensation. In Proceedings of the 2017 IEEE 56th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Kanazawa, Japan, 19–22 September 2017; pp. 73–78. [Google Scholar]
- Ozan, G.; Nusret, T. Voltage control at building integrated photovoltaic and wind turbine system with PI-PD controller. Avrupa Bilim ve Teknoloji Dergisi 2020, 18, 992–1003. [Google Scholar]
- Peram, M.; Mishra, S.; Vemulapaty, M.; Verma, B.; Padhy, P.K. Optimal PI-PD and I-PD controller design using cuckoo search algorithm. In Proceedings of the 2018 IEEE 5th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 22–23 February 2018; pp. 643–646. [Google Scholar]
- Irshad, M.; Ali, A. Robust PI-PD controller design for integrating and unstable processes. IFAC-PapersOnLine 2020, 53, 135–140. [Google Scholar] [CrossRef]
- Ali, H.I.; Saeed, A.H. Robust Tuning of PI-PD Controller for Antilock Braking System. Al-Nahrain J. Eng. Sci. 2017, 20, 983–995. [Google Scholar]
- Merrikh-Bayat, F. An iterative LMI approach for H∞ synthesis of multivariable PI/PD controllers for stable and unstable processes. Chem. Eng. Res. Des. 2018, 132, 606–615. [Google Scholar] [CrossRef]
- Zou, H.; Li, H. Improved PI-PD control design using predictive functional optimization for temperature model of a fluidized catalytic cracking unit. ISA Trans. 2017, 67, 215–221. [Google Scholar] [CrossRef]
- Alyoussef, F.; Kaya, I. Simple PI-PD tuning rules based on the centroid of the stability region for controlling unstable and integrating processes. ISA Trans. 2023, 134, 238–255. [Google Scholar] [CrossRef]
- Bingi, K.; Ibrahim, R.; Karsiti, M.N.; Hassan, S.M.; Harindran, V.R. Real-time control of pressure plant using 2DOF fractional-order PID controller. Arab. J. Sci. Eng. 2019, 44, 2091–2102. [Google Scholar] [CrossRef]
- Zheng, M.; Huang, T.; Zhang, G. A new design method for PI-PD control of unstable fractional-order system with time delay. Complexity 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Ranjbaran, K.; Tabatabaei, M. Fractional order [PI],[PD] and [PI][PD] controller design using Bode’s integrals. Int. J. Dyn. Control 2018, 6, 200–212. [Google Scholar] [CrossRef]
- Ozyetkin, M.M. A simple tuning method of fractional order PIλ-PDμ controllers for time delay systems. ISA Trans. 2018, 74, 77–87. [Google Scholar] [CrossRef] [PubMed]
- Ozyetkin, M.M.; Onat, C.; Tan, N. PI-PD controller design for time delay systems via the weighted geometrical center method. Asian J. Control 2020, 22, 1811–1826. [Google Scholar] [CrossRef]
- Dakua, B.K.; Ansari, M.S.; Bhoi, S.; Pati, B.B. Design of PI λ- PD μ Controller for Industrial Unstable and Integrating Processes with Time Delays. In Proceedings of the International Symposium on Sustainable Energy and Technological Advancements, Shillong, India, 24–25 February 2023; Springer: New York, NY, USA, 2023; pp. 261–275. [Google Scholar]
- Nema, S.; Padhy, P.K. MPSO PI-PD controller for SISO processes. In Proceedings of the 2015 IEEE 9th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 9–10 January 2015; pp. 1–6. [Google Scholar]
- Guedri, B.; Chaari, A. Design and optimal tuning of fractional order αIP-PD controller for unstable and integrating processes. In Proceedings of the 2017 IEEE International Conference on Advanced Systems and Electric Technologies (IC_ASET), Hammamet, Tunisia, 14–17 January 2017; pp. 216–220. [Google Scholar]
- Sengupta, S.; Karan, S.; Dey, C. MSP designing with optimal fractional PI–PD controller for IPTD processes. Chem. Prod. Process Model. 2022. [Google Scholar] [CrossRef]
- Upadhyaya, A.; Gaur, P. Speed Control of Hybrid Electric Vehicle using cascade control of Fractional order PI and PD controllers tuned by PSO. In Proceedings of the 2021 IEEE 18th India Council International Conference (INDICON), Guwahati, India, 19–21 December 2021; pp. 1–6. [Google Scholar]
- Bingi, K.; Ibrahim, R.; Karsiti, M.N.; Hassan, S.M.; Harindran, V.R. Fractional-Order Systems and PID Controllers; Springer: Cham, Switzerland, 2020; Volume 264. [Google Scholar]
- Abdulwahhab, O.W. Design of a complex fractional order PID controller for a first order plus time delay system. ISA Trans. 2020, 99, 154–158. [Google Scholar] [CrossRef] [PubMed]
- Fawwaz, M.A.; Bingi, K.; Ibrahim, R.; Devan, P.A.M.; Prusty, B.R. Design of pidd α controller for robust performance of process plants. Algorithms 2023, 16, 437. [Google Scholar] [CrossRef]
- Devan, P.A.M.; Ibrahim, R.; Omar, M.; Bingi, K.; Abdulrab, H. A novel hybrid harris hawk-arithmetic optimization algorithm for industrial wireless mesh networks. Sensors 2023, 23, 6224. [Google Scholar] [CrossRef] [PubMed]
- Selvam, A.M.D.P.; Hussin, F.A.; Ibrahim, R.; Bingi, K.; Nagarajapandian, M. Optimal Fractional-Order Predictive PI Controllers: For Process Control Applications with Additional Filtering; Springer Nature: Singapore, 2022. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Controller | Tuning Technique | No. of Parameters | System | Comparing Controllers | Performance Measure |
|---|---|---|---|---|---|---|
| [2] | PI-PD | Auto tuning | 4 | First and second-order unstable system with time delay | PID | Peak time, IAE, Settling time, Overshoot, Rise time |
| [12] | PI-PD | Ziegler–Nichols | 4 | First-order plus dead time (stable and unstable system) | I, PI, and PID | Settling time, Peak overshoot, Peak undershoot (-ve), IAE, ISE, ITAE, ITSE |
| [24] | PI-PD | Particle Swarm Optimization (PSO) | 4 | Antilock braking system | Feedback linearization | Friction coefficient (), Settling time, Rise time, Stopping distance (m), Range of torque (N.m) |
| [25] | PI-PD | Trial and error | 4 | First and second-order system, higher-order unstable dead time system | PI and PID | Steady state error, Settling time, Peak overshoot |
| [26] | PI-PD | Ziegler–Nichols | 4 | Second-order system, temperature control for oil-cooling machines | PID and modified PID | Disturbance rejection |
| [20] | PI-PD | Trial and error | 4 | Magnetic levitation system | Feedforward PI-PD | Settling time, Overshoot |
| [21] | PI-PD | Trial and error | 4 | Photovoltaic and wind turbine system | IPI, FOPI | Voltage |
| [27] | PI-PD | Polynomial curve fitting techniques | 4 | First and second-order system with time delay | PID | Settling time, Overshoot, Jmin |
| [28] | Fractional-order PI-PD | Ziegler–Nichols | 6 | Pressure process | PID, FOPID, PI-PD, and FOPI-PD | Rise time, Settling time, IAE Peak overshoot, ISE |
| [29] | Fractional-order PI-PD | Trial and error | 5 | Second-order dead time and oscillatory system | PI-PD | Rise time, IAE, Settling time, Peak overshoot |
| [16] | Fractional-order PI-PD | PSO and Genetic algorithm | 4 | DC-DC converter | PID, I-PD, and FOPI-PD | Settling time, Overshoot |
| [30] | Fractional-order PI-PD | Bode’s integrals | 6 | pH control, distillation column and liquid level plant | FOPI and FOPD | Overshoot, settling time and ITAE |
| [31] | Fractional-order PI-PD | Stability boundary locus and the weighted geometrical centre | 6 | pH control and multiple dead time process models | Different PI-PD control designs | Statistical analysis |
| [15] | Cascade PI-PD | Stochastic fractal search and Pattern search algorithm | 4 | Plug-in Electric Vehicles | PI and PID | Settling time, IAE, ISE, ITAE, ITSE |
| [13] | Fractional-order cascaded PI-PD | Graphical method | 6 | Cart-Inverted Pendulum, second and third-order linear time-invariant unstable system | PI λ-PDμ, -, PIλDμ | Settling time, Overshoot, Phase margin (deg), Bandwidth (rad/s), Delay margin () |
| [17] | Modified PI-PD | Auto tuning | 7 | DC motor, automatic voltage regulator | PID, modified PID, and modified PI-PD | Settling time, Overshoot, IAE |
| [18] | Modified PI-PD | Ziegler–Nichols | 7 | Aircraft pitch angle and disc position control | PID | Settling time, Overshoot, IAE, Gain and Phase margin |
| [32] | Improved PI-PD | Trial and error | 6 | FOPTD DC motor model | - | Steady state error |
| [21] | Modified PI-PD Smith predictor | Auto tuning | 4 | Multiple dead time process models | Smith predictor PI and Smith predictor PID | Settling time, Overshoot |
| [22] | Optimal PI-PD | Cuckoo search algorithm | 4 | DC motor, third-order system transfer function | I-PD | Settling time, ISE |
| Controllers | OS (%) | Settling Time (, Seconds) | Rise Time (, Seconds) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PID | 17.5 | 4.12 | 9.46 | - | - | - | - | 0.7406 | 98.3306 | 66.4899 |
| PI-PD | 17.5 | 4.12 | 9.46 | - | - | - | - | 3.7814 | 117.7727 | 32.3616 |
| FOPID | 17.5 | 4.12 | 9.46 | 0.98 | 0.02 | - | - | 0 | 86.9470 | 30.8176 |
| FOPI-FOPD | 17.5 | 4.12 | 9.46 | 0.98 | 0.02 | - | - | 0 | 138.7361 | 68.7531 |
| COPI-PD | 17.5 | 4.12 | 9.46 | 0.98 | - | 0.01 | - | 3.7814 | 117.7864 | 32.3687 |
| PI-COPD | 17.5 | 4.12 | 9.46 | - | 0.02 | - | 0.01 | 3.7642 | 117.6919 | 31.7754 |
| COPI-FOPD | 17.5 | 4.12 | 9.46 | 0.98 | 0.02 | 0.01 | - | 0.0318 | 139.1953 | 69.9659 |
| FOPI-COPD | 17.5 | 4.12 | 9.46 | 0.98 | 0.02 | - | 0.01 | 0 | 138.5352 | 68.5506 |
| COPI-COPD | 17.5 | 4.12 | 9.46 | 0.98 | 0.02 | 0.01 | 0.01 | 0.0014 | 138.9981 | 69.7455 |
| Controllers | OS (%) | Settling Time (, Seconds) | Rise Time (, Seconds) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PID | 17.5 | 4.12 | 9.46 | - | - | - | - | 3.663 × 10 | 116.8035 | 14.1159 |
| PI-PD | 17.5 | 4.12 | 9.46 | - | - | - | - | 0.9225 | 105.4154 | 34.6860 |
| FOPID | 17.5 | 4.12 | 9.46 | 0.98 | 0.02 | - | - | 0 | 113.8499 | 30.5718 |
| FOPI-FOPD | 17.5 | 4.12 | 9.46 | 0.98 | 0.02 | - | - | 0.0547 | 146.5290 | 93.6863 |
| COPI-PD | 17.5 | 4.12 | 9.46 | 0.98 | - | 0.01 | - | 0.9242 | 105.4284 | 34.6943 |
| PI-COPD | 17.5 | 4.12 | 9.46 | - | 0.02 | - | 0.01 | 0.8785 | 105.2664 | 33.0961 |
| COPI-FOPD | 17.5 | 4.12 | 9.46 | 0.98 | 0.02 | 0.01 | - | 0.1751 | 147.0024 | 94.8372 |
| FOPI-COPD | 17.5 | 4.12 | 9.46 | 0.98 | 0.02 | - | 0.01 | 0 | 148.1435 | 95.0625 |
| COPI-COPD | 17.5 | 4.12 | 9.46 | 0.98 | 0.02 | 0.01 | 0.01 | 0.0076 | 148.6575 | 96.3397 |
| Controllers | OS (%) | Settling Time (, Seconds) | Rise Time (, Seconds) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PID | 2.4532 | 4.8789 | 0.3314 | - | - | - | - | 22.1842 | 97.8430 | 17.0763 |
| PI-PD | 2.4532 | 4.8789 | 0.3314 | - | - | - | - | 6.7384 | 88.5320 | 15.3694 |
| FOPID | 2.4532 | 4.8789 | 0.3314 | 0.98 | 0.02 | - | - | 54.8152 | 93.8416 | 11.3073 |
| FOPI-FOPD | 2.4532 | 4.8789 | 0.3314 | 0.98 | 0.02 | - | - | 15.8640 | 94.9228 | 12.0943 |
| COPI-PD | 2.4532 | 4.8789 | 0.3314 | 0.98 | - | 0.01 | - | 6.6980 | 88.5421 | 15.3753 |
| PI-COPD | 2.4532 | 4.8789 | 0.3314 | - | 0.02 | - | 0.01 | 7.3362 | 88.0580 | 15.3340 |
| COPI-FOPD | 2.4532 | 4.8789 | 0.3314 | 0.98 | 0.02 | 0.01 | - | 16.5639 | 94.7933 | 12.0374 |
| FOPI-COPD | 2.4532 | 4.8789 | 0.3314 | 0.98 | 0.02 | - | 0.01 | 15.8146 | 94.8964 | 12.0969 |
| COPI-COPD | 2.4532 | 4.8789 | 0.3314 | 0.98 | 0.02 | 0.01 | 0.01 | 16.5141 | 94.7665 | 12.04 |
| Controllers | OS (%) | Settling Time (, Seconds) | Rise Time (, Seconds) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PID | 1 | 1 | 0.1 | - | - | - | - | 6.1045 × | 237.6946 | 78.3350 |
| PI-PD | 1 | 1 | 0.1 | - | - | - | - | 0 | 240.7698 | 80.6822 |
| FOPID | 1 | 1 | 0.1 | 0.98 | 0.02 | - | - | 1.2636 × | 239.3677 | 79.5915 |
| FOPI-FOPD | 1 | 1 | 0.1 | 0.98 | 0.02 | - | - | 0 | 241.8704 | 81.9465 |
| COPI-PD | 1 | 1 | 0.1 | 0.98 | - | 0.01 | - | 1.2549 × | 239.3861 | 79.6018 |
| PI-COPD | 1 | 1 | 0.1 | - | 0.02 | - | 0.01 | 1.2648 × | 239.3679 | 79.5916 |
| COPI-FOPD | 1 | 1 | 0.1 | 0.98 | 0.02 | 0.01 | - | 2.6519 × | 241.5152 | 82.1655 |
| FOPI-COPD | 1 | 1 | 0.1 | 0.98 | 0.02 | - | 0.01 | 0 | 241.8741 | 81.9517 |
| COPI-COPD | 1 | 1 | 0.1 | 0.98 | 0.02 | 0.01 | 0.01 | 2.3946 × | 241.5194 | 82.1699 |
| Controllers | OS (%) | Settling Time (, Seconds) | Rise Time (, Seconds) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PID | 0.5 | 0.5 | −0.01 | - | - | - | - | 6.5841 | 163.0095 | 18.5776 |
| PI-PD | 0.5 | 0.5 | −0.01 | - | - | - | - | 0.3905 | 175.9587 | 38.7020 |
| FOPID | 0.5 | 0.5 | −0.01 | 0.98 | 0.02 | - | - | 4.0610 | 162.1264 | 25.0510 |
| FOPI-FOPD | 0.5 | 0.5 | −0.01 | 0.98 | 0.02 | - | - | 0.2565 | 178.9595 | 40.4344 |
| COPI-PD | 0.5 | 0.5 | −0.01 | 0.98 | - | 0.01 | - | 0.2876 | 176.0390 | 38.7466 |
| PI-COPD | 0.5 | 0.5 | −0.01 | - | 0.02 | - | 0.01 | 7.5495 × | 177.5542 | 83.0930 |
| COPI-FOPD | 0.5 | 0.5 | −0.01 | 0.98 | 0.02 | 0.01 | - | 0 | 180.4267 | 86.5732 |
| FOPI-COPD | 0.5 | 0.5 | −0.01 | 0.98 | 0.02 | - | 0.01 | 0 | 180.2877 | 84.9259 |
| COPI-COPD | 0.5 | 0.5 | −0.01 | 0.98 | 0.02 | 0.01 | 0.01 | 2.1894 × | 180.4000 | 86.4863 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bin Roslan, M.N.; Bingi, K.; Devan, P.A.M.; Ibrahim, R. Design and Development of Complex-Order PI-PD Controllers: Case Studies on Pressure and Flow Process Control. Appl. Syst. Innov. 2024, 7, 33. https://doi.org/10.3390/asi7030033
Bin Roslan MN, Bingi K, Devan PAM, Ibrahim R. Design and Development of Complex-Order PI-PD Controllers: Case Studies on Pressure and Flow Process Control. Applied System Innovation. 2024; 7(3):33. https://doi.org/10.3390/asi7030033
Chicago/Turabian StyleBin Roslan, Muhammad Najmi, Kishore Bingi, P. Arun Mozhi Devan, and Rosdiazli Ibrahim. 2024. "Design and Development of Complex-Order PI-PD Controllers: Case Studies on Pressure and Flow Process Control" Applied System Innovation 7, no. 3: 33. https://doi.org/10.3390/asi7030033
APA StyleBin Roslan, M. N., Bingi, K., Devan, P. A. M., & Ibrahim, R. (2024). Design and Development of Complex-Order PI-PD Controllers: Case Studies on Pressure and Flow Process Control. Applied System Innovation, 7(3), 33. https://doi.org/10.3390/asi7030033