
Constant Luminous Flux Approach for Portable Light-Emitting Diode Lamps Based on the Zero-Average Dynamic Controller




Abstract
1. Introduction
- Compared to other solutions, this paper presents a solution for maintaining constant luminous flux in portable lighting based on LEDs, using the ZAD and PID controllers.
- The electronic control system demonstrates the feasibility of adaptive current regulation to maintain constant luminous flux in the lighting system.
- The previous literature has not presented a detailed mathematical model that considers the required current variation and maintains similar luminous flux in a portable LED lamp. Therefore, this paper presents a mathematical model for the controller and the adjustment of the monitoring of the current is given in the paper. In addition, the results of tests that consider changes in operating conditions are presented to demonstrate the effectiveness of the proposed control.
2. Materials and Methods
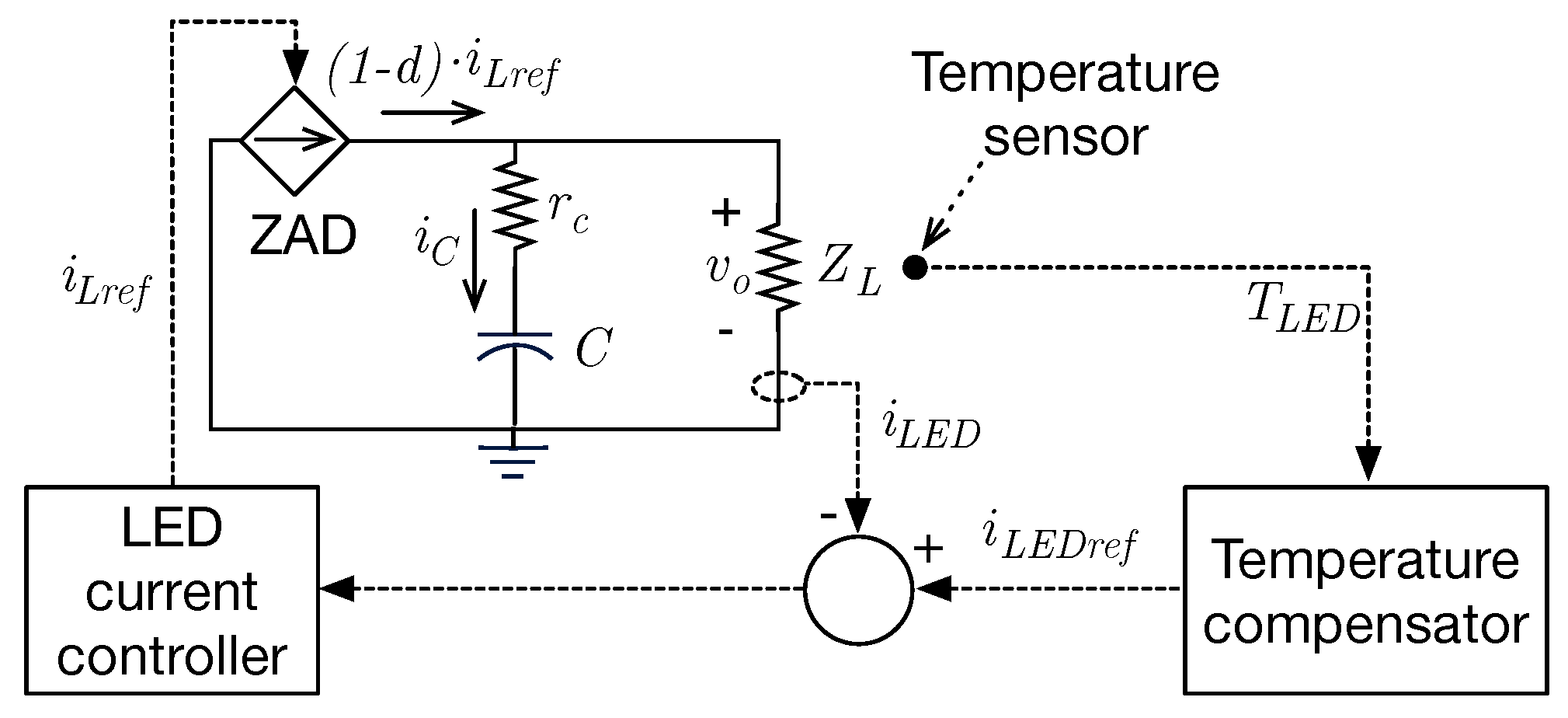
2.1. General Diagram
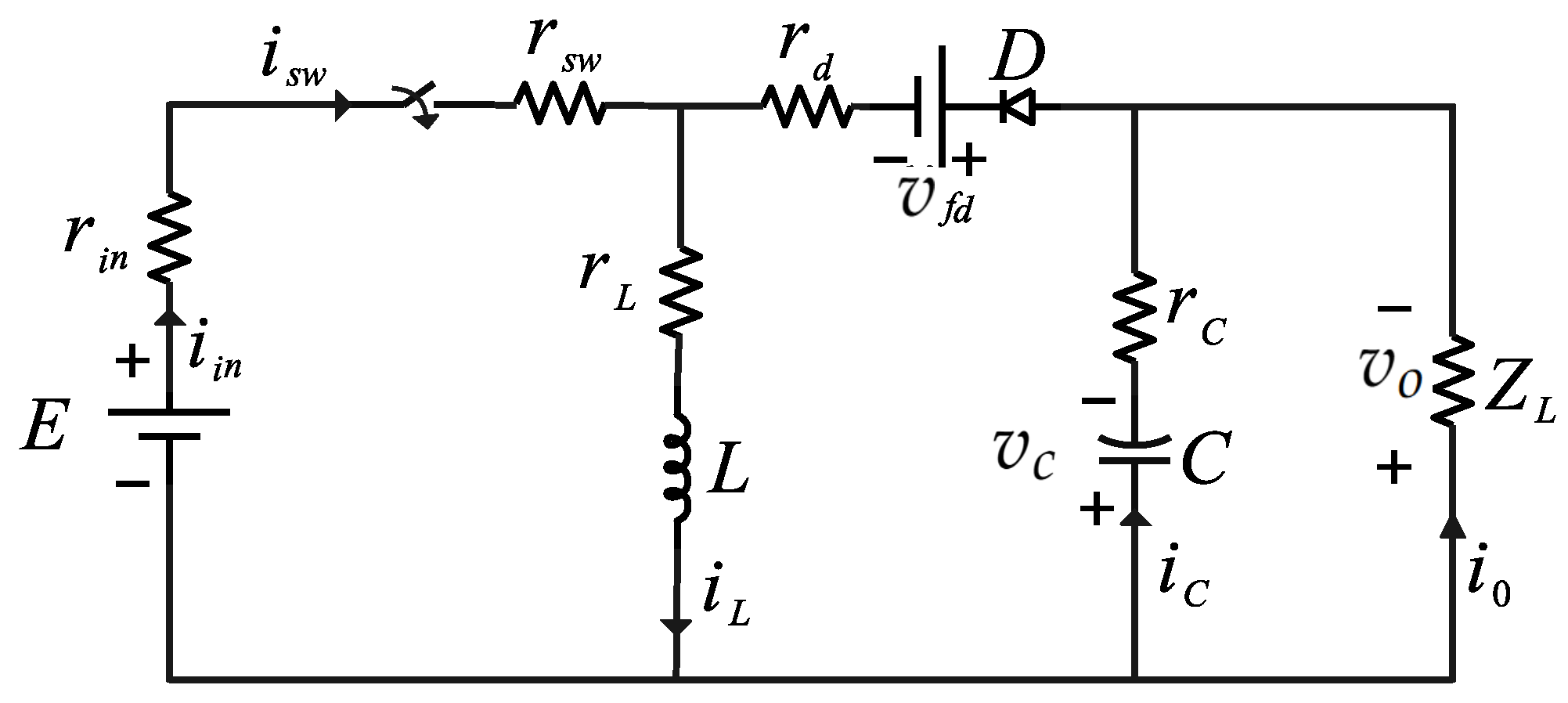
2.2. Electrical Circuit Model
2.3. ZAD Control
2.4. LED Current Control
2.5. Parameters of the Circuit
2.6. Parameters of the LED Current Controller and Batteries
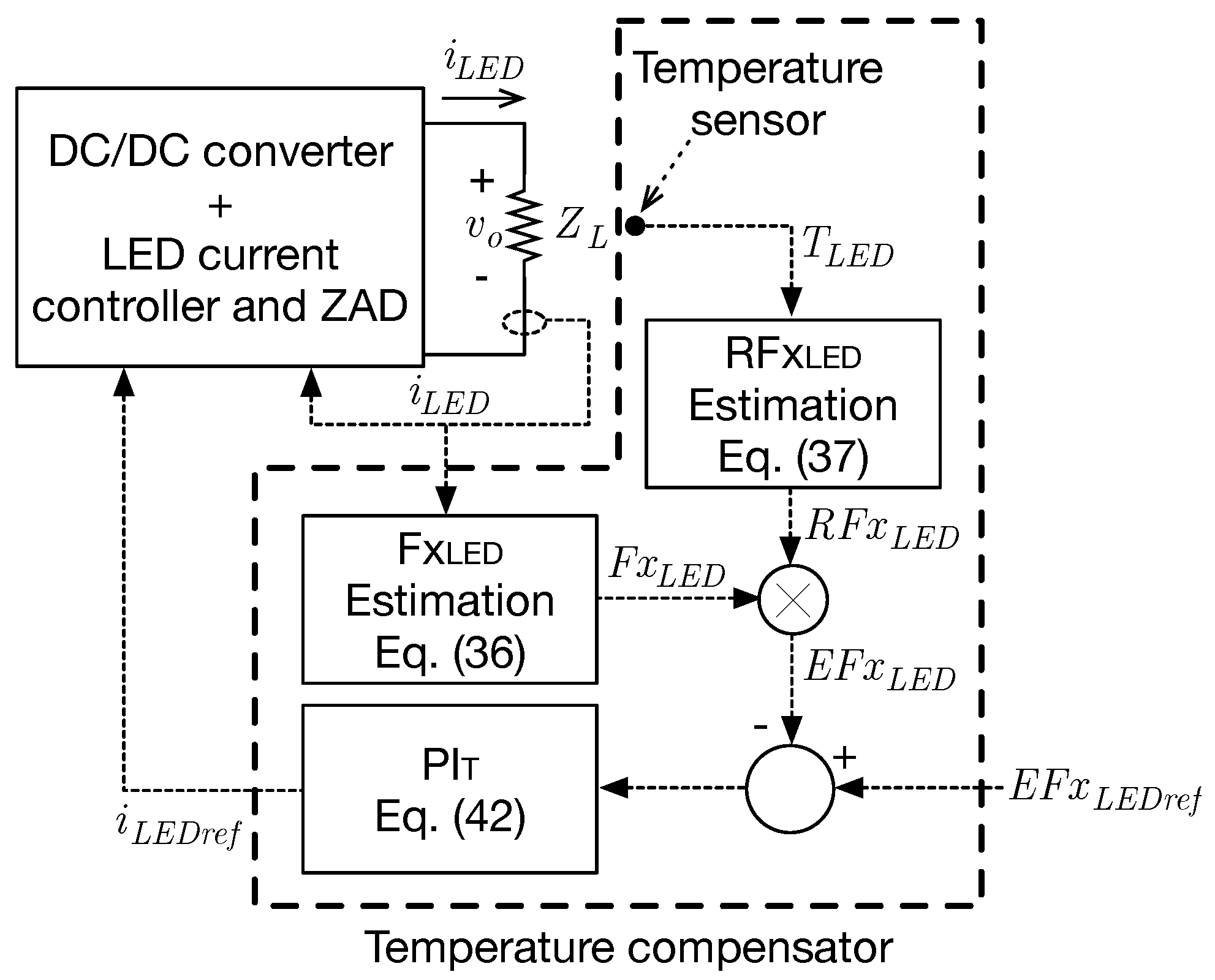
2.7. Temperature Compensation and Luminous Flux Regulation
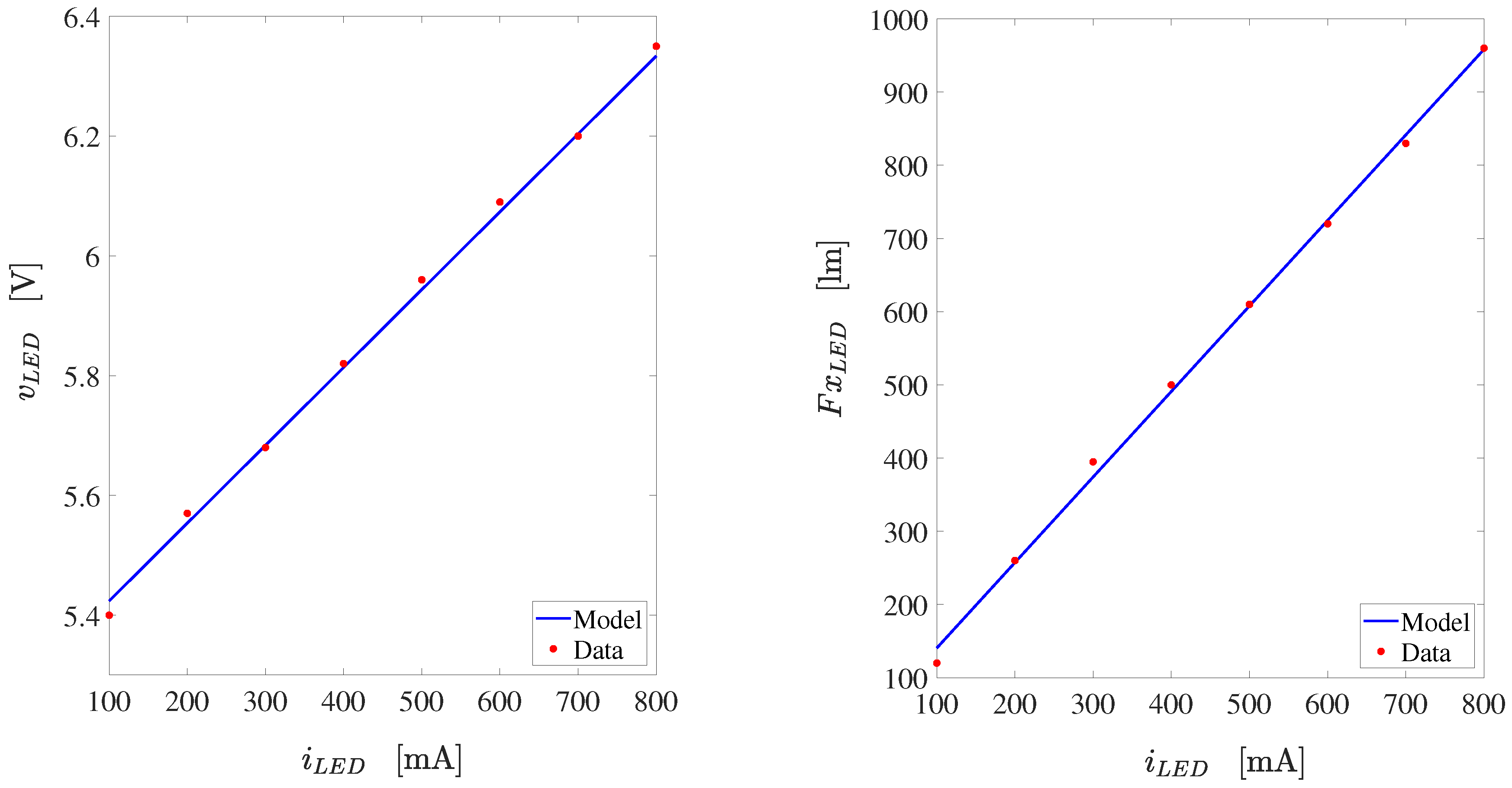
- The voltage vs. current relation.
- The luminous flux vs. current relation.
- The luminous flux vs. temperature relation.
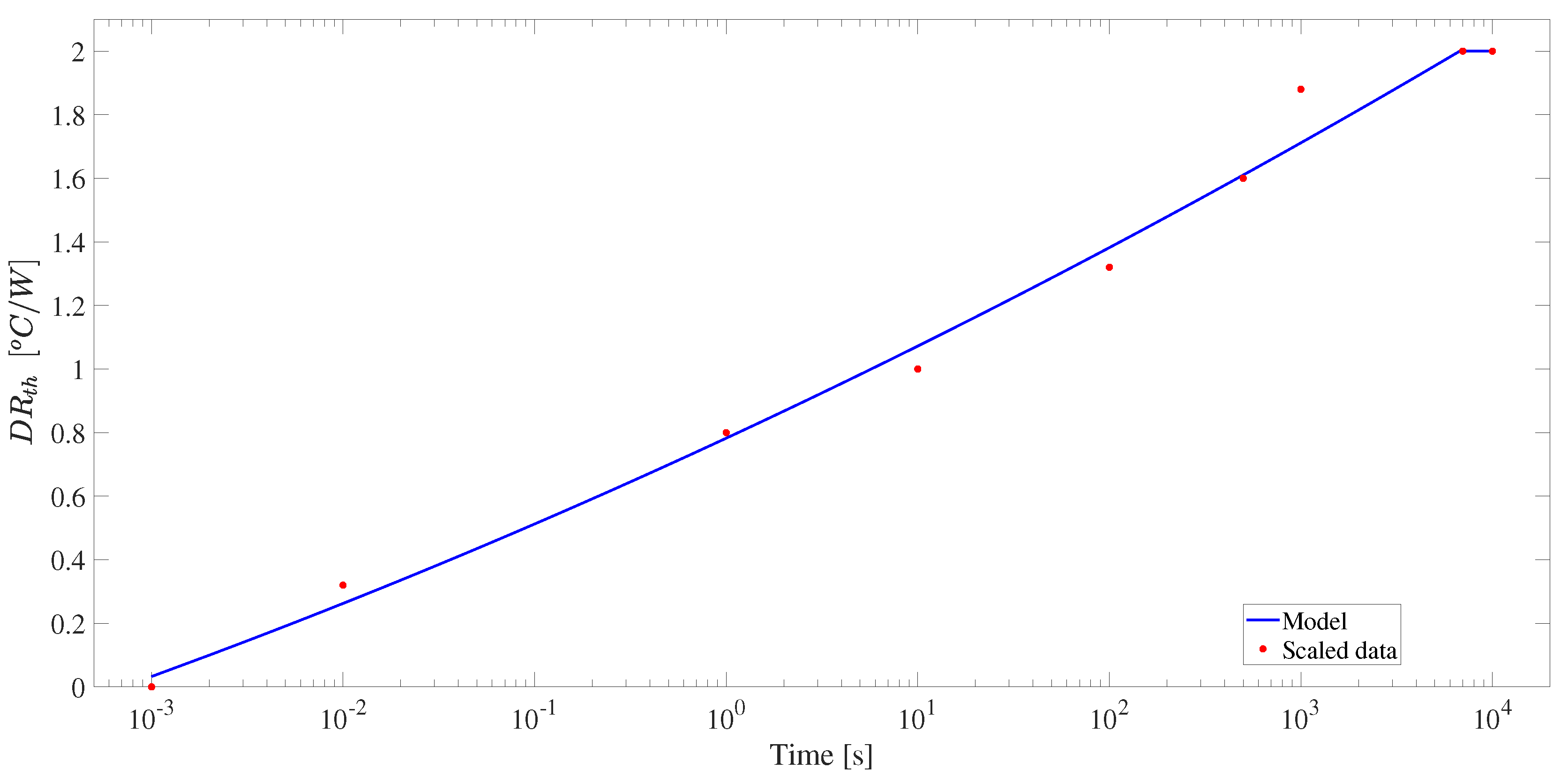
- The temperature variation vs. the operating time.
- Set the LED current to the desired value.
- Calculate the LED voltage using (35) and the LED power as .
- The increment in the LED temperature is calculated as . Then, the LED temperature is calculated by adding the ambient temperature as .
- The theoretical luminous flux of the LED is calculated from (36).
- The relative luminous flux caused by the LED temperature is calculated from (37).
- Finally, the effective luminous flux produced by the LED, due to the temperature effect, is calculated from (38).
3. Results and Analysis
3.1. Tests Performed in the System
- Test 1: LED current control in boost mode with a 12-volt battery.
- Test 2: LED current control in buck-boost mode with a 18-volt battery.
- Test 3: LED current control in buck mode with a 24-volt battery.
- Test 4: LED current control with a discharged 12-volt battery.
- Test 5: luminous flux regulation, testing the LED start-up and long time operation.
3.2. Test 1: LED Current Control in Boost Mode
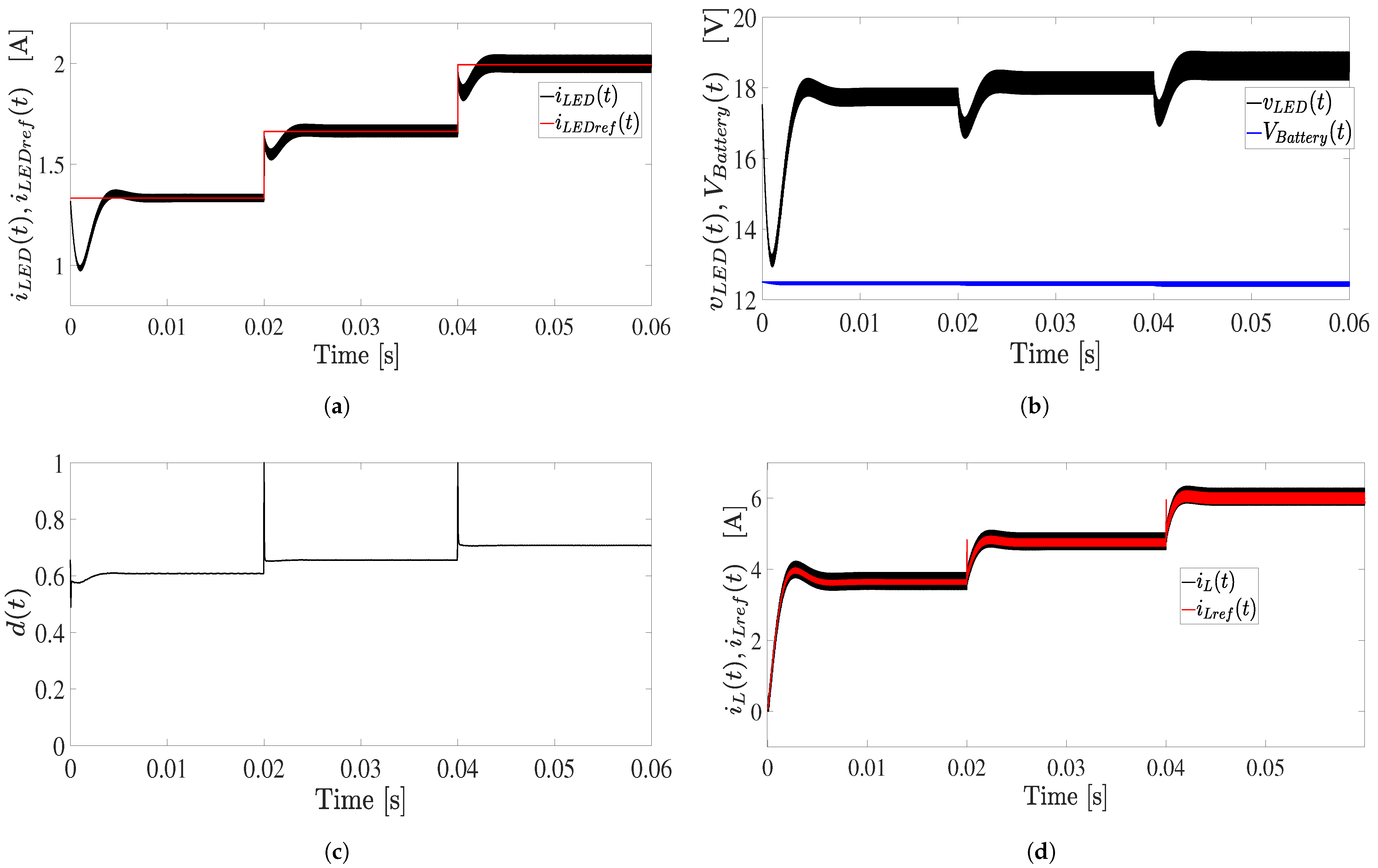
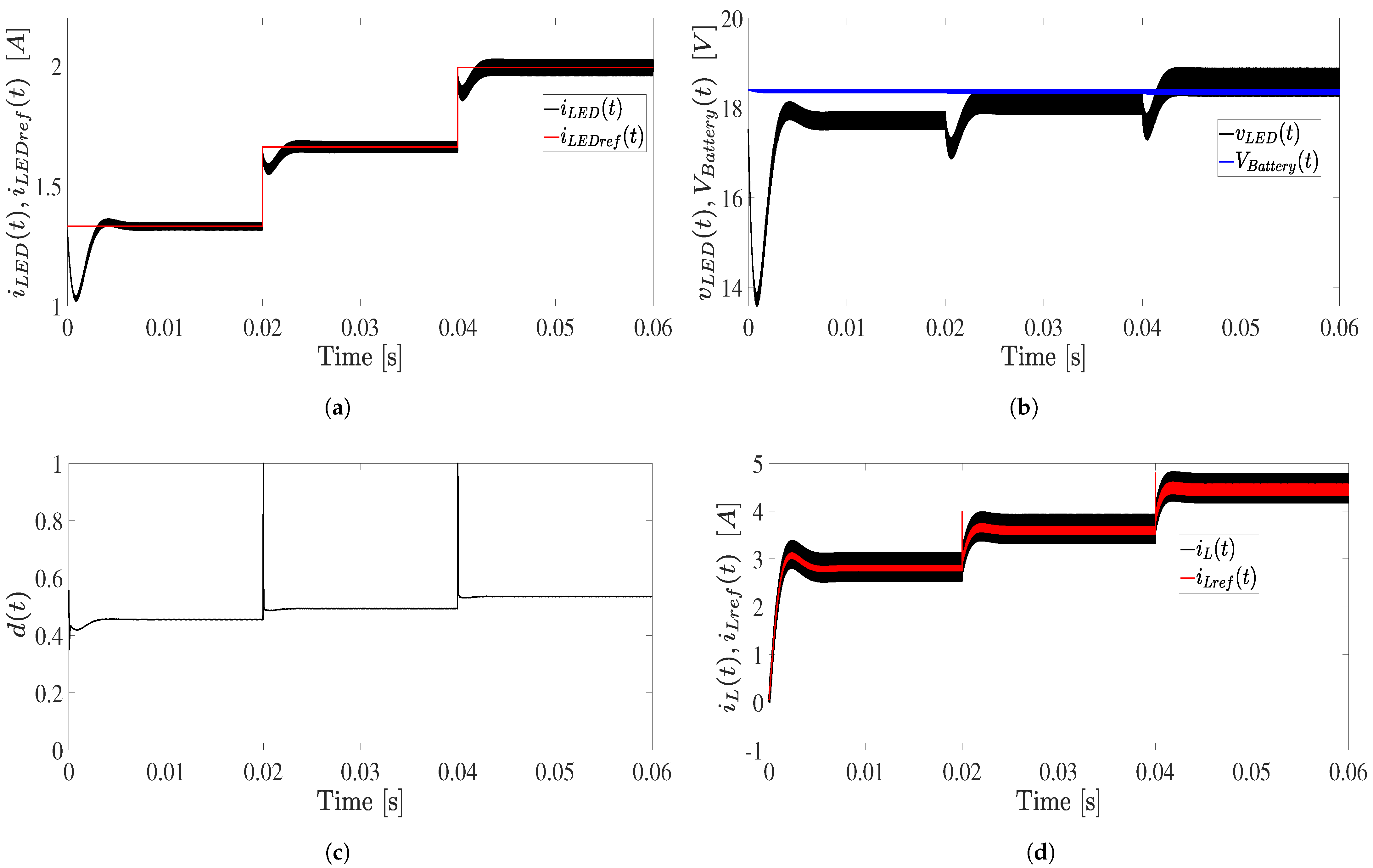
3.3. Test 2: LED Current Control in Buck-Boost Mode
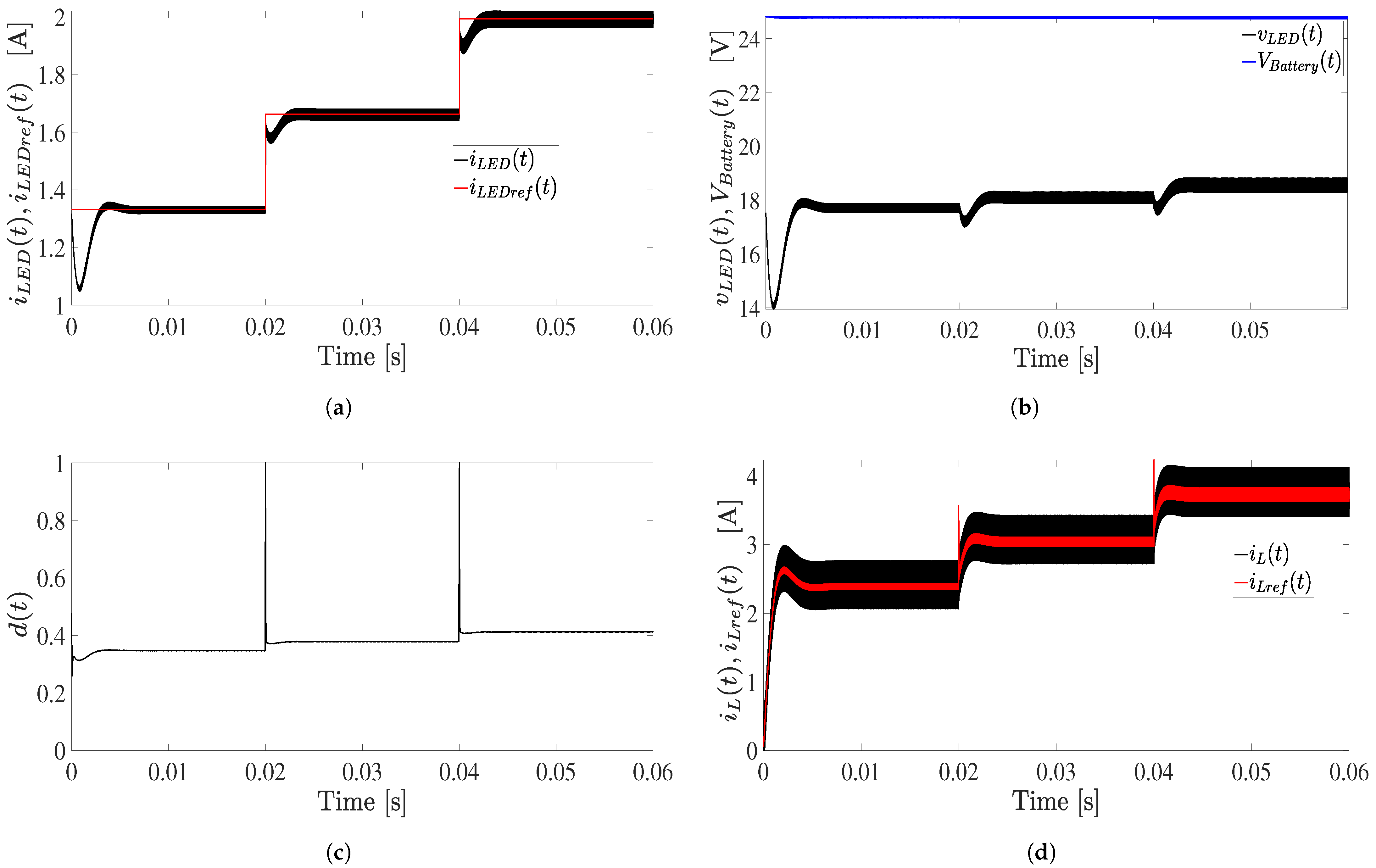
3.4. Test 3: LED Current Control in Buck Mode
3.5. Test 4: LED Current Control with Discharged Battery
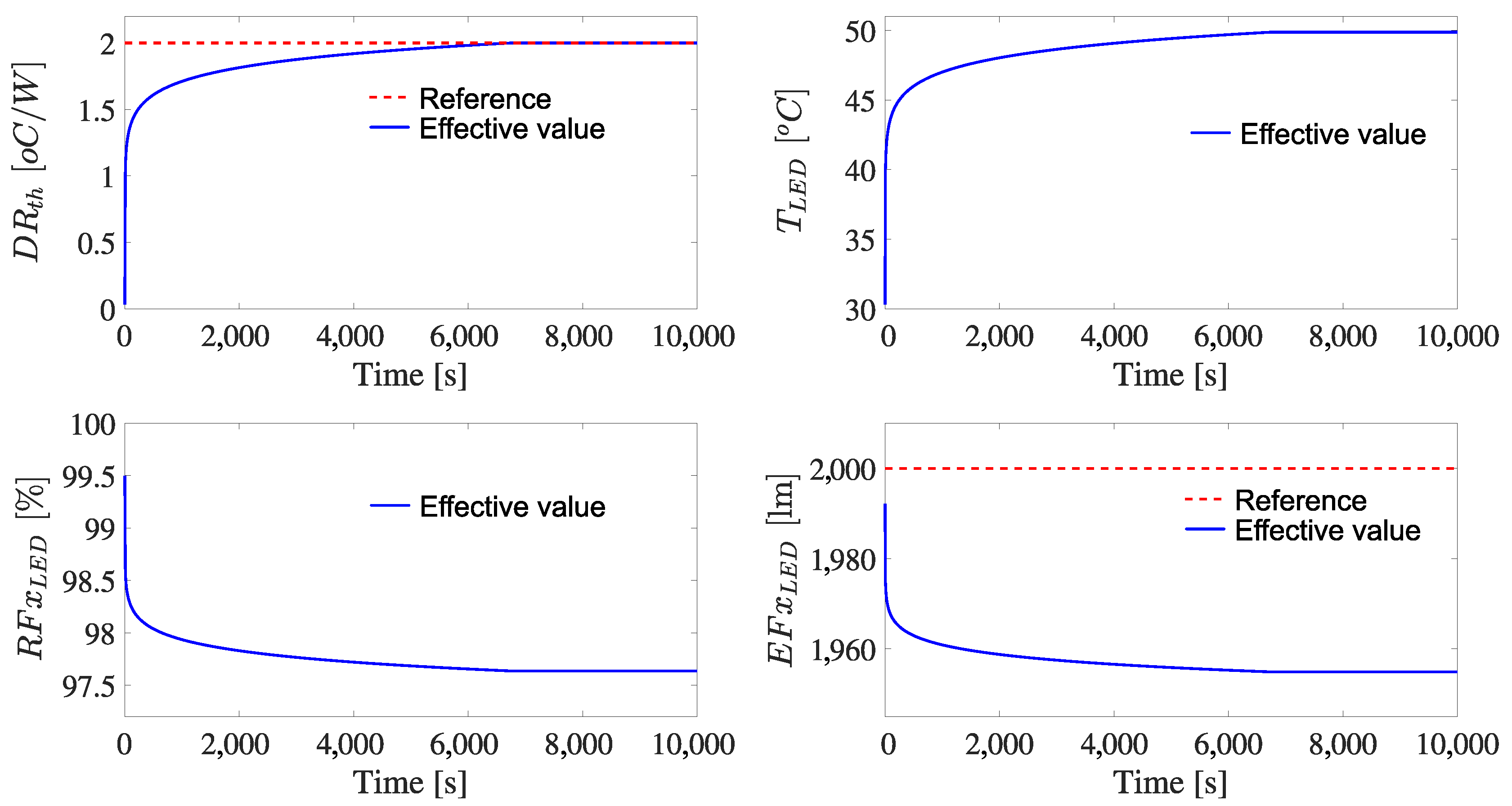
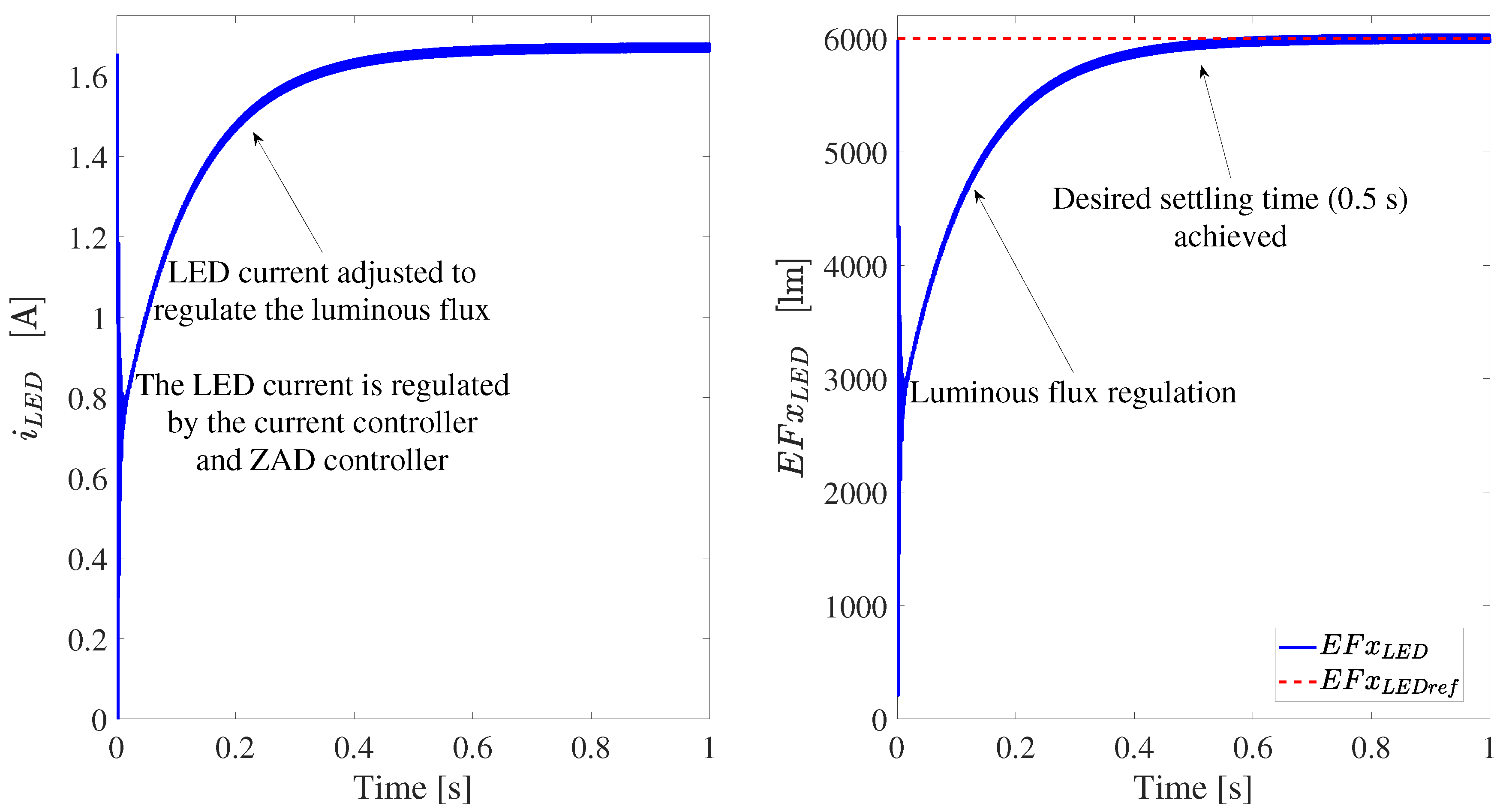
3.6. Test 5: Luminous Flux Regulation
4. Conclusions
- This system can adapt the current to maintain constant luminous flux required for reliable portable lighting applications used in outdoor activities.
- The ZAD and PID controllers are capable of switching the MOSFET at a fixed switching frequency as the duty cycle is constant and not saturated. This would reduce switching losses, audible noise in the coil, and subharmonic electromagnetic interferences and chattering.
- The system is able to work even with batteries of different voltages and presents the same behavior in terms of luminosity. The only difference is that, depending on the value of the battery at the input, the system behaves as an elevator or reducer.
- The system works efficiently even if the battery is discharged and maintains the luminous flux constant until it is totally discharged.
- The system can provide uniform illumination during charge and discharge conditions, enhancing usability for outdoor activities, emergency situations, and professional applications. The system is applicable to improve the user experience in activities that require similar illumination over long periods.
- The integration of the temperature compensation loop successfully preserves the effective luminous flux over extended operation times, confirming the controller’s robustness against thermal variations in real use scenarios.
- The joint implementation of the ZAD and PID controllers guarantees precise LED current regulation, enabling smooth tracking of dynamic reference changes with minimal ripple and no overshoot.
- Simulation results confirm that the ZAD-PID control structure is robust against input voltage drops and temperature-induced variations, delivering consistent performance under representative real-world operating conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Apostolidou, N.; Valsamas, F.; Baros, D.; Loupis, M.; Dasteridis, V.; Kokkinis, C. Innovative energy-recovery unit for the LED-lighting system of heavy-duty vehicles. Clean Technol. 2021, 3, 581–593. [Google Scholar] [CrossRef]
- Kim, H.C.; Choi, M.C.; Kim, S.; Jeong, D.K. An AC–DC LED driver with a two-parallel inverted buck topology for reducing the light flicker in lighting applications to low-risk levels. IEEE Trans. Power Electron. 2017, 32, 3879–3891. [Google Scholar] [CrossRef]
- Pinto, R.A.; Cosetin, M.R.; Campos, A.; Dalla Costa, M.A.; do Prado, R.N. Compact emergency lamp using power LEDs. IEEE Trans. Ind. Electron. 2012, 59, 1728–1738. [Google Scholar] [CrossRef]
- Pulli, T.; Dönsberg, T.; Poikonen, T.; Manoocheri, F.; Kärhä, P.; Ikonen, E. Advantages of white LED lamps and new detector technology in photometry. Light Sci. Appl. 2015, 4, e332. [Google Scholar] [CrossRef]
- Vieira, J.A.B.; Mota, A.M. Implementation of a stand-alone photovoltaic lighting system with MPPT battery charging and LED current control. In Proceedings of the 2010 IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010. [Google Scholar]
- Esteki, M.; Khajehoddin, S.A.; Safaee, A.; Li, Y. LED Systems Applications and LED Driver Topologies: A Review. IEEE Access 2023, 11, 38324–38358. [Google Scholar] [CrossRef]
- Singh, S.; Bhullar, S. Hardware implementation of auto switching and light intensity control of LED lamps. Balk. J. Electr. Comput. Eng. 2016, 4, 67–71. [Google Scholar] [CrossRef]
- DiLouie, C. Advanced Lighting Controls: Energy Savings, Productivity, Technology and Applications; River: Gistrup, Denmark, 2021. [Google Scholar]
- Chepurna, O.; Grebinyk, A.; Petrushko, Y.; Prylutska, S.; Grebinyk, S.; Yashchuk, V.; Matyshevska, O.; Ritter, U.; Dandekar, T.; Frohme, M.; et al. LED-based portable light source for photodynamic therapy. In Proceedings of the Optics in Health Care and Biomedical Optics IX, Hangzhou, China, 21–23 October 2019. [Google Scholar]
- Bastian, A.; Devara, K.; Ramadhanty, S.; Abuzairi, T. Design of portable emergency lamp utilizing thin film solar cell and inflatable case. E3S Web Conf. 2018, 67, 01019. [Google Scholar] [CrossRef]
- Restrepo Alvarez, A.F.; Bolivar Chaves, O.F.; Arias, C.M.; Villamil Villar, B.I. Development of a portable lighting system powered by photovoltaic solar energy: Chucheros-Buenaventura community application case. Ing. Compet. 2021, 23, e21010806. [Google Scholar]
- Matoso, H.M.; Morais, L.M.F.; Cortizo, P.C.; Donoso-Garcia, P.F. Intelligent power LED lighting system with wireless communication. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar]
- Torrisi, A.; Baggio, F.; Brunelli, D. Visible light communication for intermittent computing battery-less IoT devices. In Lecture Notes in Electrical Engineering; Springer International Publishing: Cham, Switzerland, 2022; pp. 155–163. [Google Scholar]
- Wu, M.T.; Lin, C.L.; Lin, C.C.; Chung, L.P. Stabilising current driver for high-voltage light-emitting diodes. IET Power Electron. 2014, 7, 1024–1030. [Google Scholar] [CrossRef]
- Shankar, A.; Vijayakumar, K.; Babu, B.C.; Durusu, A. Smart LED lighting system for energy efficient industrial and commercial LVDC nanogrid powered buildings with BIPV. In Proceedings of the 2020 International Conference on Smart Energy Systems and Technologies (SEST), Istanbul, Turkey, 7–9 September 2020. [Google Scholar]
- Hariri, A.; Lemaster, J.; Wang, J.; Jeevarathinam, A.S.; Chao, D.L.; Jokerst, J.V. The characterization of an economic and portable LED-based photoacoustic imaging system to facilitate molecular imaging. Photoacoustics 2018, 9, 10–20. [Google Scholar] [CrossRef] [PubMed]
- Raypah, M.E.; Mahmud, S.; Devarajan, M.; AlShammari, A. Enhancement of luminous flux of InGaAlP-based low-power SMD LEDs using substrates with different thermal resistances. Microelectron. Int. 2020, 38, 6–13. [Google Scholar] [CrossRef]
- Chen, W.; Fan, J.; Qian, C.; Pu, B.; Fan, X.; Zhang, G. Reliability assessment of light-emitting diode packages with both luminous flux response surface model and spectral power distribution method. IEEE Access 2019, 7, 68495–68502. [Google Scholar] [CrossRef]
- LUMINUS. MP-5050-240E. Mid Power LED. Product Datasheet. Available online: https://download.luminus.com/datasheets/Luminus_MP5050_240E_Datasheet.pdf (accessed on 15 April 2025).
- Górecki, K.; Ptak, P.; Janicki, M.; Napieralska, M. Comparison of properties for selected experimental set-ups dedicated to measuring thermal parameters of power LEDs. Energies 2021, 14, 3240. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Input Voltage | 12 VDC |
| Source Resistance | 0.3 |
| Inductor L | 0.784 mH |
| Inductor Resistance | 0.2 |
| Diode Forward Voltage | 0.7 V |
| Diode Resistance | 0.03 |
| MOSFET Switch Resistance | 0.0175 |
| Capacitance C | 132 |
| Capacitor Resistance | 0.05 |
| Impedance per group | 3.9375 |
| Control parameter with ZAD | −0.0032 |
| Switching Frequency = | 20 kHz |
| PI Controller Proportional Gain | 3.4905 A/A |
| PI Controller Integral Gain | 5627.1 A/s |
| Thermal Resistance (steady state) | 2 °C/W |
| Ambient Temperature | 30 °C |
| Battery | Voltage (V) | Capacity (Ah) | Cost (USD) | Service Time (h) |
|---|---|---|---|---|
| CA1233 | 12 | 3.3 | $11.56 | 2 |
| BW 1280 F1 | 12 | 8 | $24.99 | 5 |
| PC36-12NB | 10.5 | 38.6 | $81.75 | 24 |
| Battery | Battery Chemistry | Voltage (V) | Capacity (Ah) | Cost (USD) | Service Time at 5 A |
|---|---|---|---|---|---|
| BW 1280 F1 | Lead Acid | 12 | 8 | $24.99 | 1.6 h |
| TOOL-486LI-30 | Lithium Ion | 18 | 3 | $38.69 | 0.6 h |
| UPS-BAT/VRLA-WTR | Lead Acid | 24 | 13 | $695.54 | 2.4 h |
| CUSTOM-334 | Nickel Metal Hydride | 12 | 0.4 | $25.58 | 288 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the International Institute of Knowledge Innovation and Invention. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramos-Paja, C.A.; Hoyos, F.E.; Candelo-Becerra, J.E. Constant Luminous Flux Approach for Portable Light-Emitting Diode Lamps Based on the Zero-Average Dynamic Controller. Appl. Syst. Innov. 2025, 8, 59. https://doi.org/10.3390/asi8030059
Ramos-Paja CA, Hoyos FE, Candelo-Becerra JE. Constant Luminous Flux Approach for Portable Light-Emitting Diode Lamps Based on the Zero-Average Dynamic Controller. Applied System Innovation. 2025; 8(3):59. https://doi.org/10.3390/asi8030059
Chicago/Turabian StyleRamos-Paja, Carlos A., Fredy E. Hoyos, and John E. Candelo-Becerra. 2025. "Constant Luminous Flux Approach for Portable Light-Emitting Diode Lamps Based on the Zero-Average Dynamic Controller" Applied System Innovation 8, no. 3: 59. https://doi.org/10.3390/asi8030059
APA StyleRamos-Paja, C. A., Hoyos, F. E., & Candelo-Becerra, J. E. (2025). Constant Luminous Flux Approach for Portable Light-Emitting Diode Lamps Based on the Zero-Average Dynamic Controller. Applied System Innovation, 8(3), 59. https://doi.org/10.3390/asi8030059