Simplified Analysis for Multiple Input Systems: A Toolbox Study Illustrated on F-16 Measurements


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Basics
2.1. Definitions and Assumptions
2.2. Measurement and Instrumentation
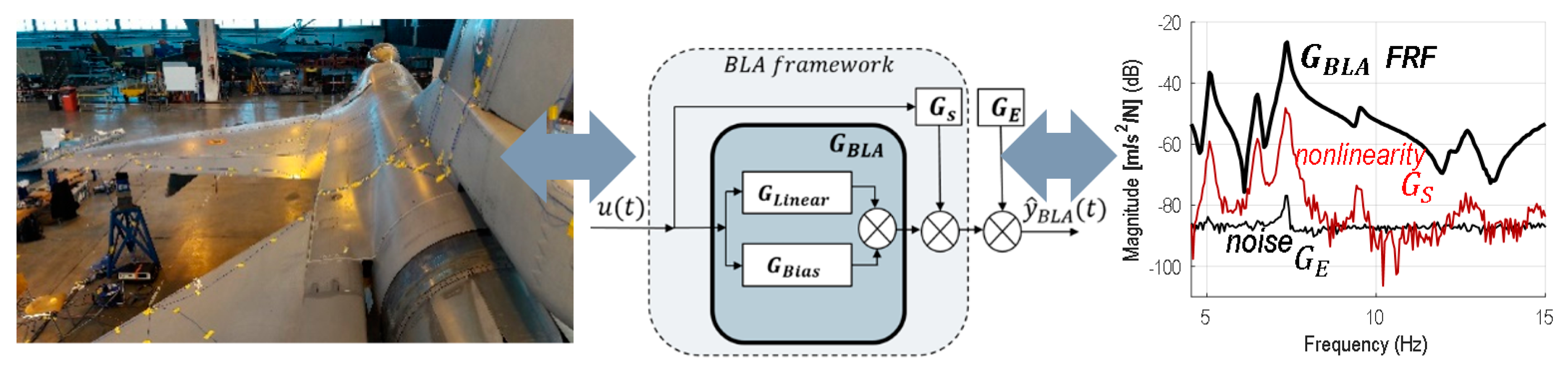
2.3. Best Linear Approximation Framework
3. The Toolbox
3.1. Introduction
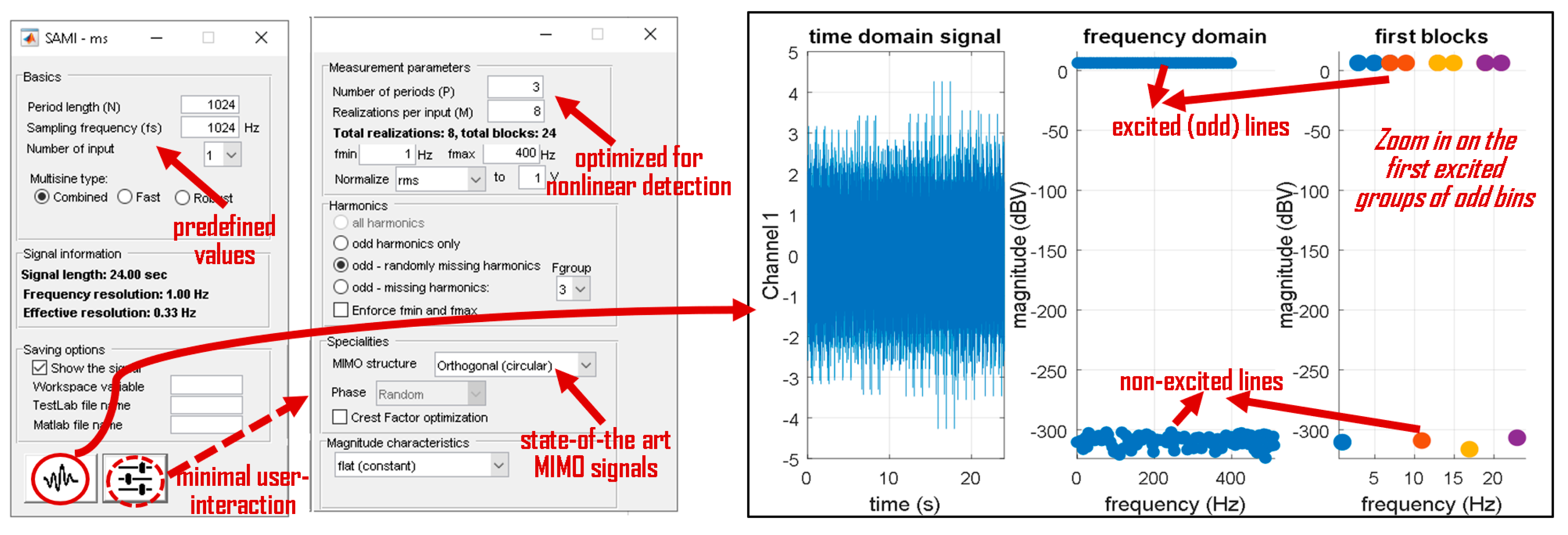
- The design of experiment layer addresses the signal design, and the choice of measurement parameters.
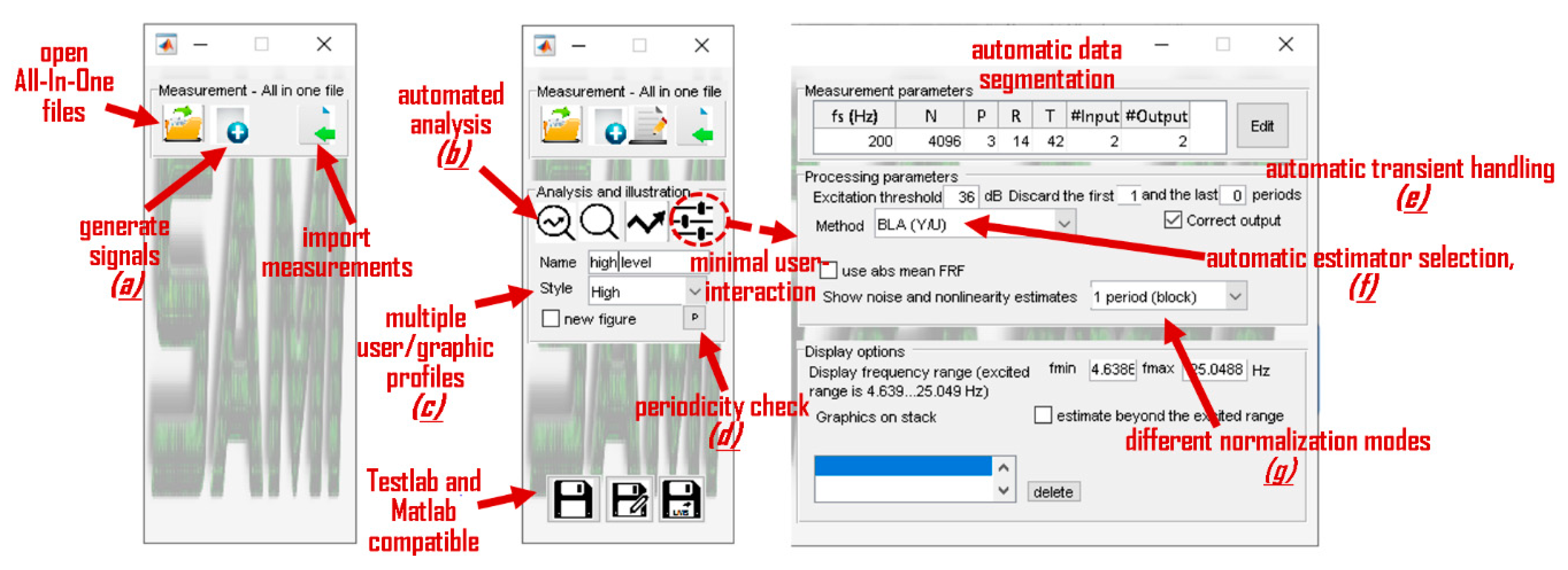
- The pre-processing layer considers a check-up of the input (reference) channels and provides an early warning to the user when the inputs are too strongly correlated. Furthermore, it segments the measurement data over the periods and realizations, and it sets up the processing parameters for the BLA estimation.
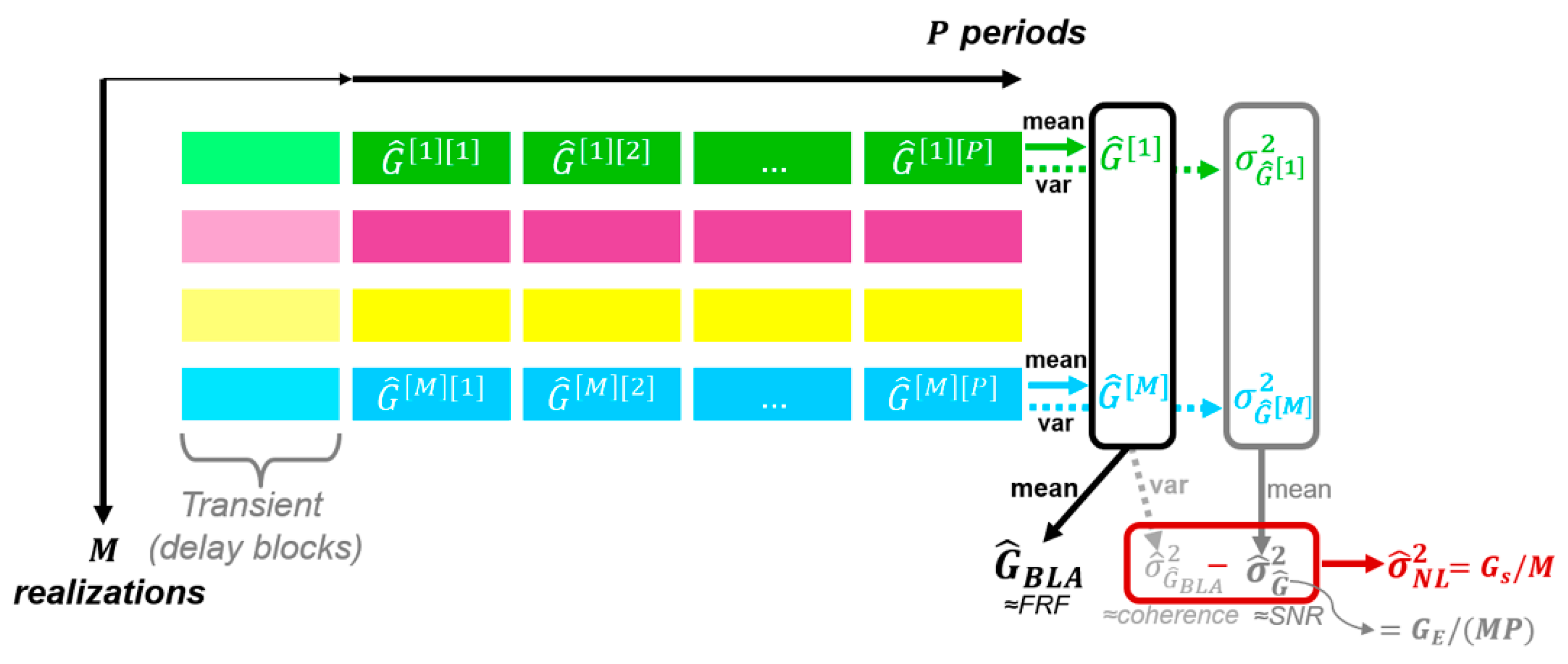
- The BLA estimation layer provides the BLA FRF estimation, calculates advanced statistics of the noise and nonlinearity, and when it applies, estimates the transient term.
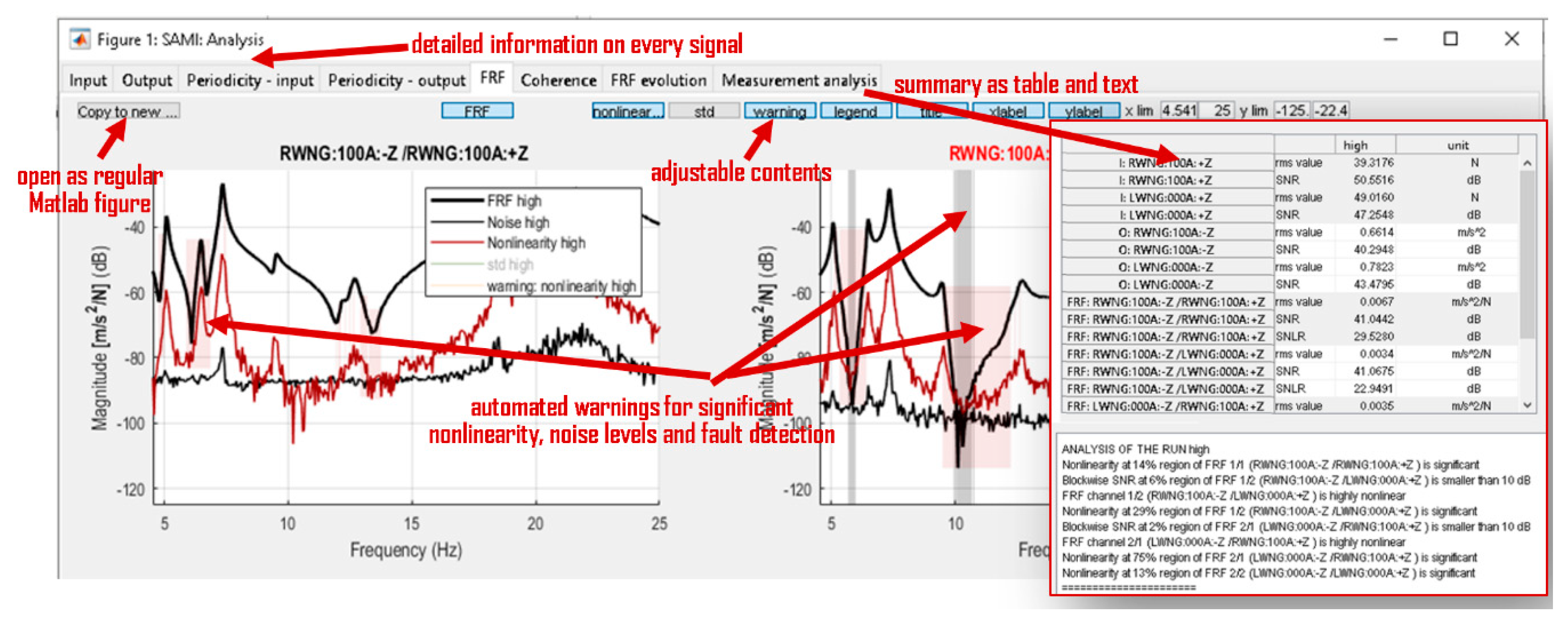
- The post-processing layer makes the estimation results and warnings accessible in a condensed form. It provides users with the FRF, noise, and nonlinearity estimates. It is possible to automatically highlight the FRF (or input, output, reference) channels that have significant nonlinearity or noise levels based on the user-defined profiles. Furthermore, channels with sensory faults and/or imperfections, and correlated inputs are detected as well.
3.2. Multisine Signals
3.3. Measurement Processing
4. Experimental Illustration
4.1. F16 Measurement
4.2. Data Processing
4.3. Reference and Input Signal
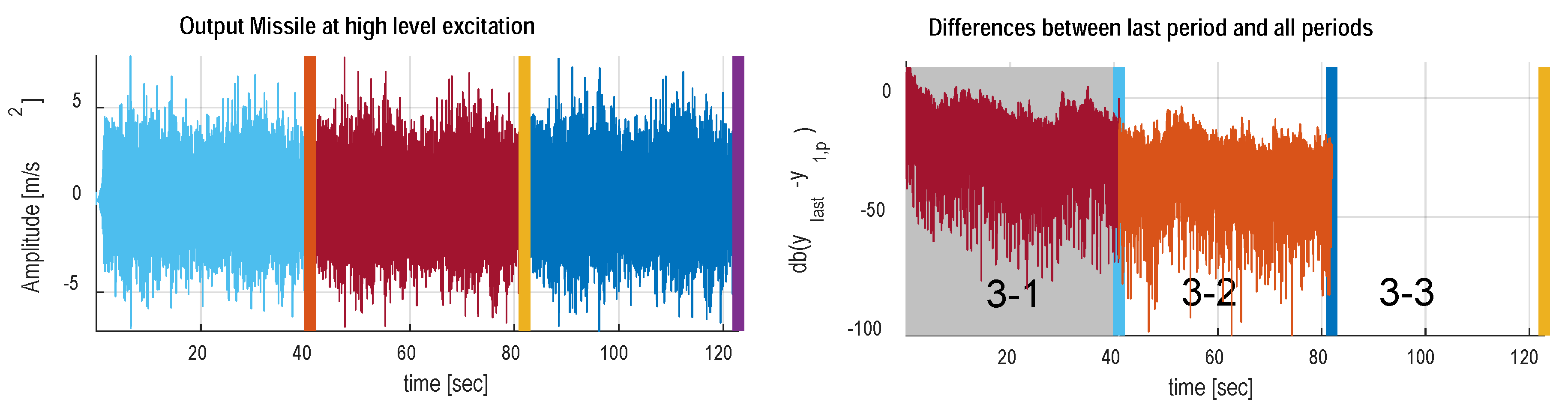
4.4. Payload Measurement
4.5. FRF Analysis
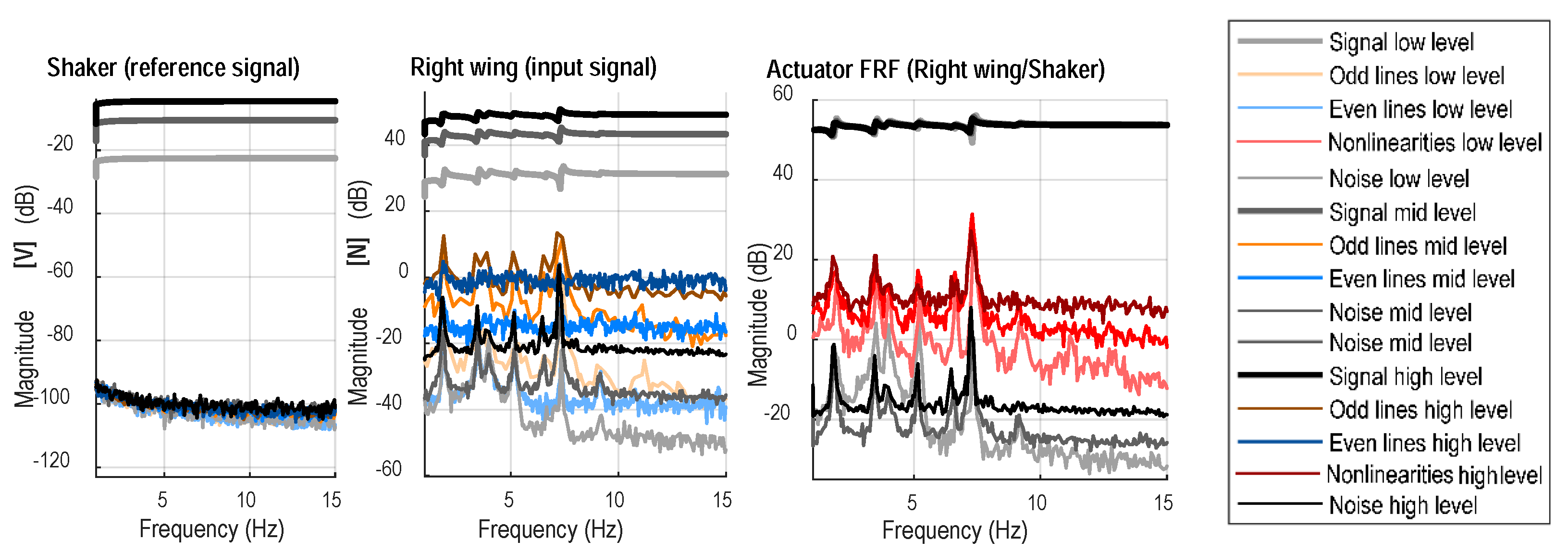
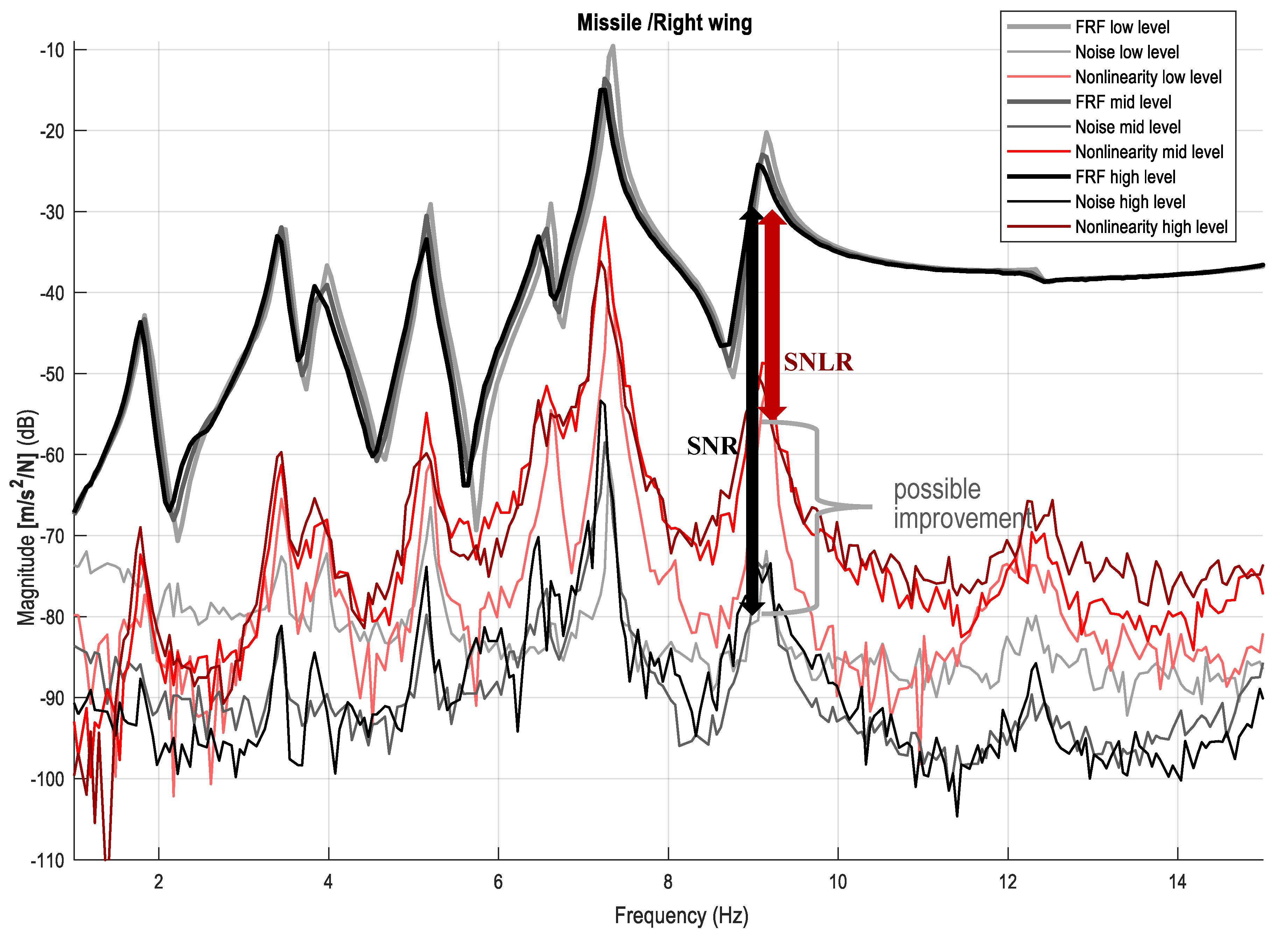
4.5.1. FRFs at Different Excitation Levels
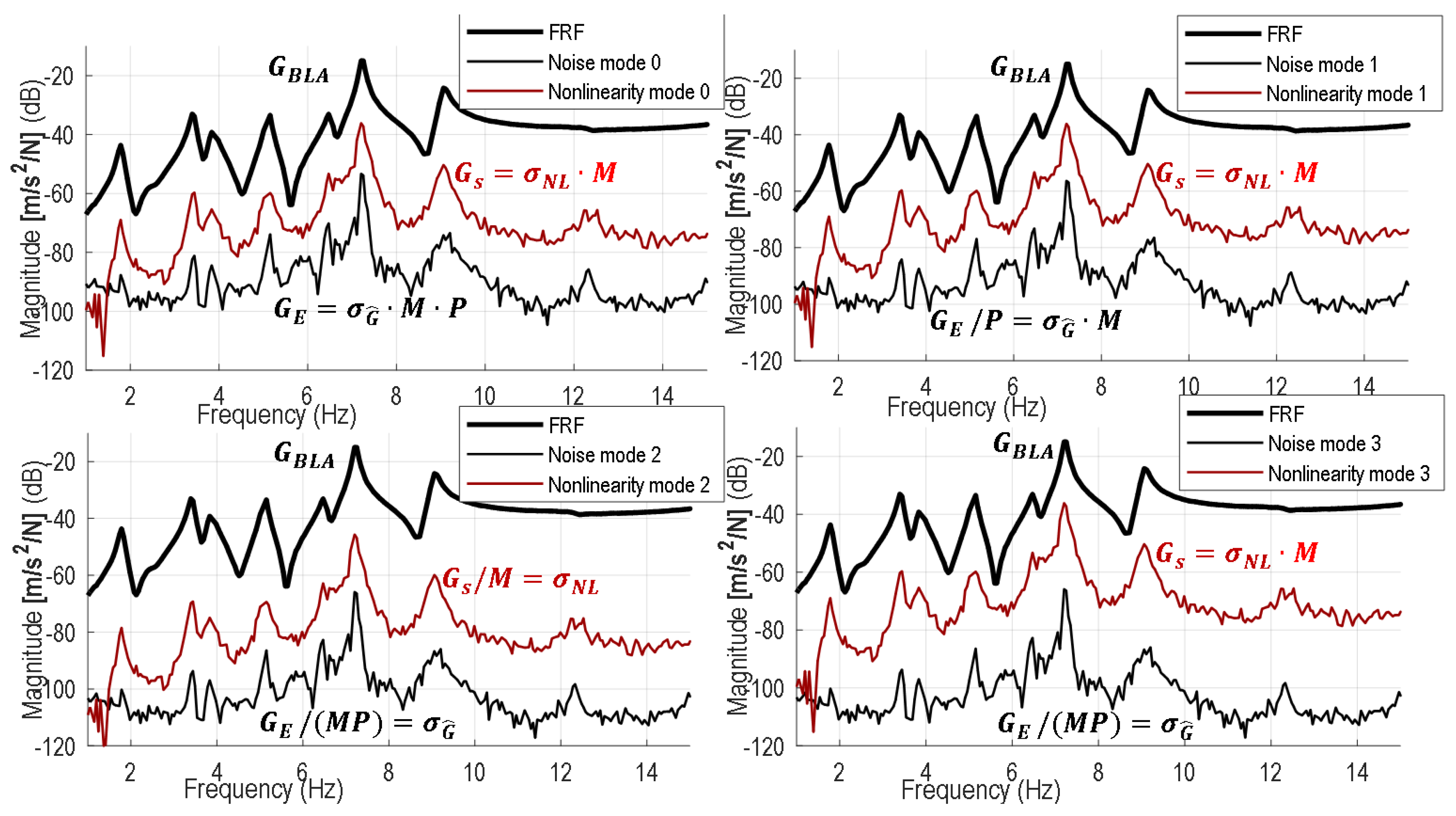
4.5.2. Normalization Modes.
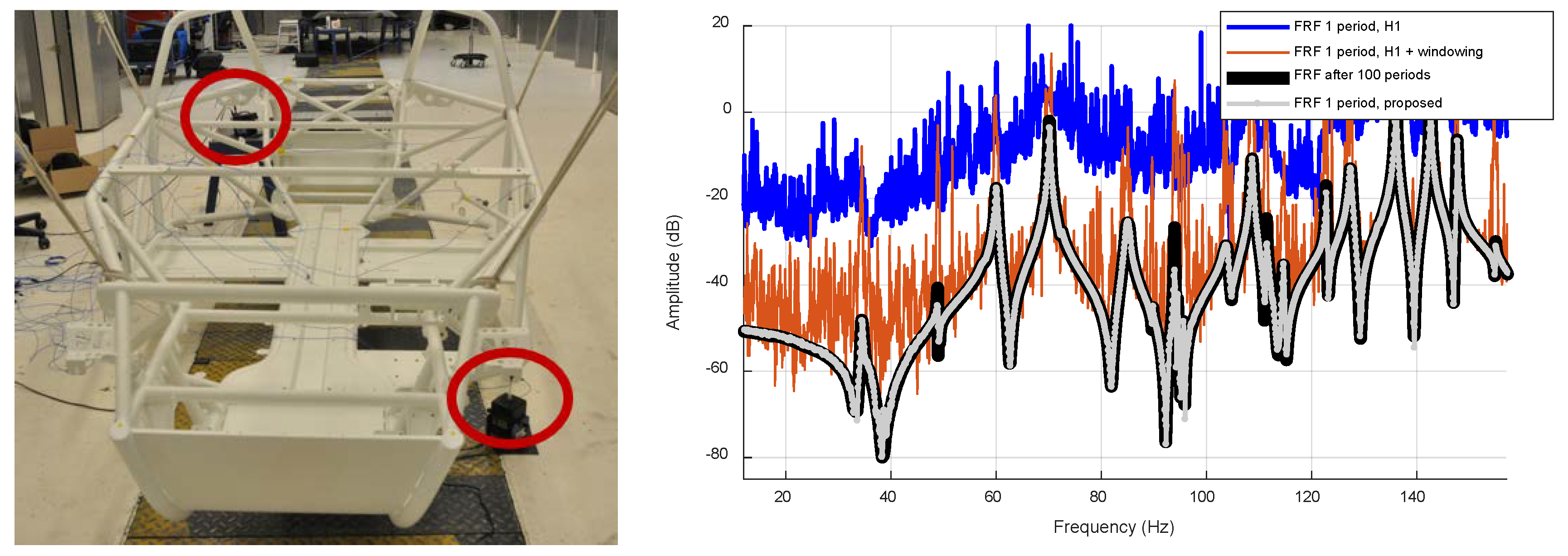
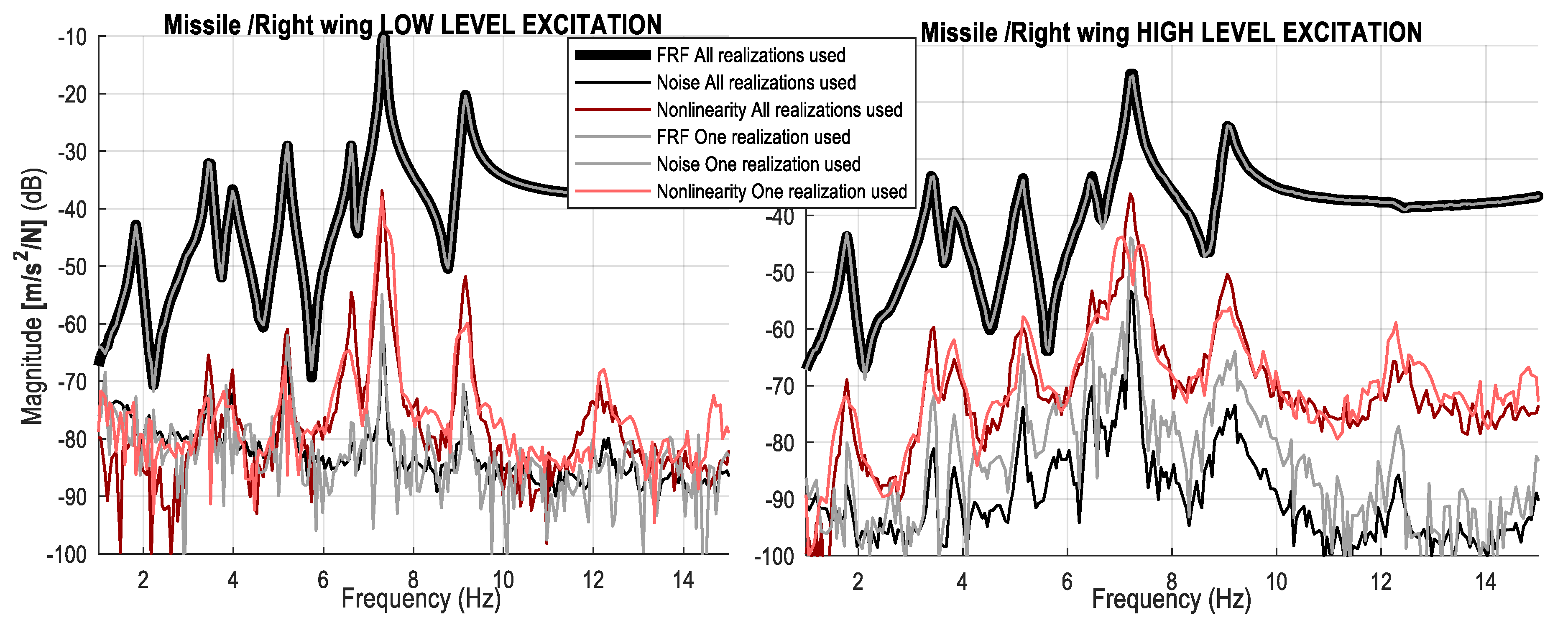
4.5.3. Using One Realization
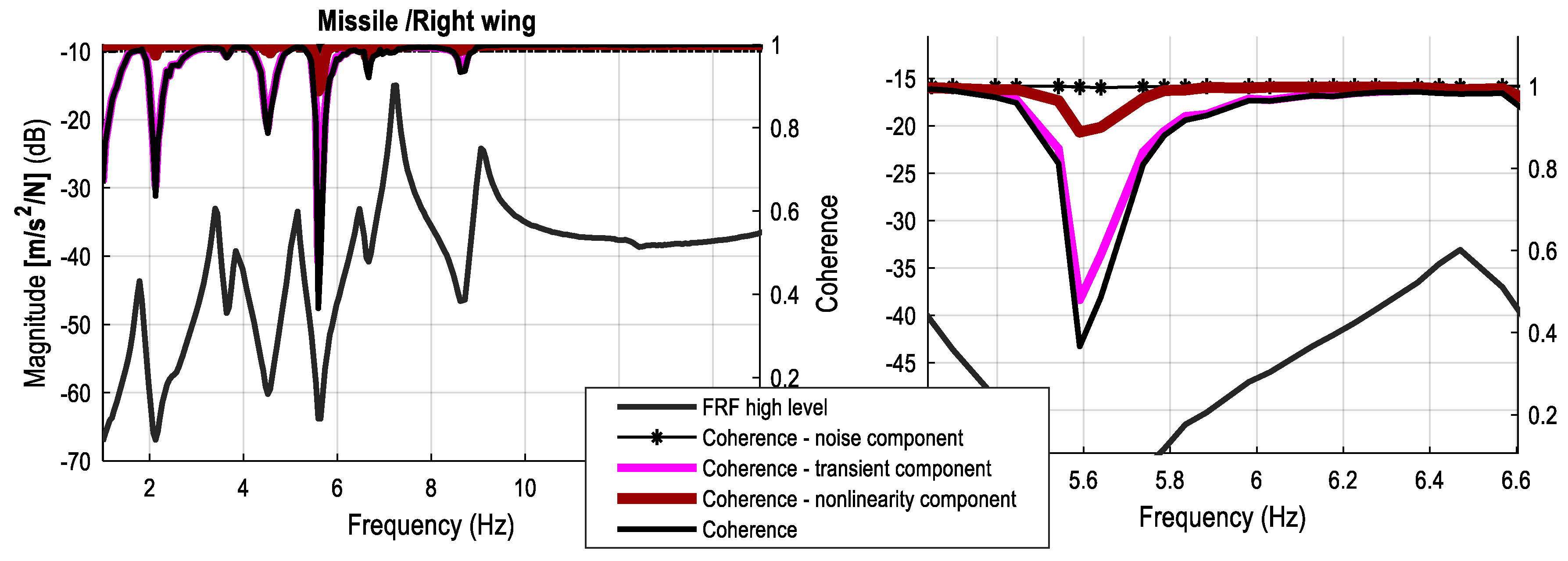
4.5.4. Coherence Function
5. Conclusions
- It requires minimal user-interaction, and no expert-user
- Excitation signals are optimized for structures with multiple inputs
- The reference, input and output measurements were nonparametrically characterized
- The actuator system is characterized to improve the output measurement quality in case of nonlinear actuator and/or feedback
- An advanced frequency response matrix estimation method is used. It is a simple but robust estimation process; at each excitation level of noise, nonlinearity and transient information can be retrieved.
Author Contributions
Funding
Conflicts of Interest
References
- Kerschen, G.; Worden, K.; Vakakis, A.F.; Golinval, J.-C. Past, present and future of nonlinear system identification in structural dynamics. Mech. Syst. Signal Process. 2006, 20, 505–592. [Google Scholar] [CrossRef]
- Worden, K.; Tomlinson, G.R. Nonlinearity in Structural Dynamics: Detection, Identification and Modelling; Institute of Physics Publishing: Bristol, UK, 2001. [Google Scholar]
- Schoukens, J.; Godfrey, K.; Schoukens, M. Nonparametric data-driven modeling of linear systems: Estimating the frequency response and impulse response function. IEEE Control Syst. Mag. 2018, 38, 49–88. [Google Scholar] [CrossRef]
- Schoukens, J.; Ljung, L. Nonlinear System Identification: A User-Oriented Road Map. IEEE Control Syst. Mag. 2019, 39, 28–99. [Google Scholar]
- Lauwers, L.; Schoukens, J.; Pintelon, R.; Enqvist, M. Nonlinear Structure Analysis Using the Best Linear. In Proceedings of the International Conference on Noise and Vibration Engineering, Leuven, Belgium, 18–20 September 2006. [Google Scholar]
- Esfahani, A.; Schoukens, J.; Vanbeylen, L. Using the Best Linear Approximation with Varying Excitation Signals for Nonlinear System Characterization. IEEE Trans. Instrum. Meas. 2016, 65, 1271–1280. [Google Scholar] [CrossRef][Green Version]
- Wong, H.K.; Schoukens, J.; Godfrey, K. Analysis of Best Linear Approximation of a Wiener–Hammerstein System for Arbitrary Amplitude Distributions. IEEE Trans. Instrum. Meas. 2012, 61, 645–654. [Google Scholar] [CrossRef]
- Schoukens, J.; Pintelon, R. Study of the Variance of Parametric Estimates of the Best Linear Approximation of Nonlinear Systems. IEEE Trans. Instrum. Meas. 2010, 59, 3156–3167. [Google Scholar] [CrossRef]
- Schoukens, J.; Vaes, M.; Pintelon, R. Linear System Identification in a Nonlinear Setting. Nonparametric Analysis of the Nonlinear Distortions and Their Impact on the Best Linear Approximation. IEEE Control Syst. Mag. 2016, 36, 38–69. [Google Scholar]
- Pintelon, R.; Schoukens, J. System Identification: A Frequency Domain Approach, 2nd ed.; Wiley-IEEE Press: Hoboken, NJ, USA, 2012; ISBN 978-0470640371. [Google Scholar]
- Csurcsia, P.Z. Static nonlinearity handling using best linear approximation: An introduction. Pollack Period. 2013, 8, 153–166. [Google Scholar] [CrossRef]
- Heylen, W.; Sas, P. Modal Analysis Theory and Testing; Lirias: Leuven, Belgium, 2005. [Google Scholar]
- Schoukens, J.; Pintelon, R.; Rolain, Y. Mastering System Identification in 100 Exercises; John Wiley & Sons: Hoboken, NJ, USA, 2012; ISBN 978047093698. [Google Scholar]
- Csurcsia, P.Z.; Peeters, B.; Schoukens, J. The Best Linear Approximation of MIMO Systems: First Results on Simplified Nonlinearity Assessment. In Proceedings of the IMAC International Modal Analysis Conference, Orlando, FL, USA, 28–31 January 2019. [Google Scholar]
- McKelvey, T.; Guérin, G. Non-parametric frequency response estimation using a local rational model. In Proceedings of the IFAC Symposium on System Identification, Brussels, Belgium, 11–13 July 2012. [Google Scholar]
- Priemer, R. Introductory Signal Processing; World Scientific: Singapore, 1991; ISBN 9971509199. [Google Scholar]
- Siemens, Simcenter Testlab. Available online: https://www.plm.automation.siemens.com/global/en/products/simcenter/ (accessed on 1 February 2020).
- Kay, S.M. Modern Spectral Estimation: Theory and Application; Prentice Hall Signal Processing Series; Pearson Education India: Bengaluru, Indian, 1988. [Google Scholar]
- Alvarez Blanco, M.; Csurcsia, P.Z.; Peeters, B.; Janssens, K.; Desmet, W. Nonlinearity assessment of MIMO electroacoustic systems on direct field environmental acoustic testing. In Proceedings of the International conference on Noise and Vibration, Leuven, Belgium, 17–19 September 2018. [Google Scholar]
- Noël, J.P.; Schoukens, M. F-16 aircraft benchmark based on ground vibration test data. In Proceedings of the 2017 Workshop on Nonlinear System Identification Benchmarks, Brussels, Belgium, 24–26 April 2017. [Google Scholar]
- Gómez González, A.; Rodríguez, J.; Sagartzazu, X.; Schumacher, A.; Isasa, I. Multiple Coherence Method in Time Domain for the Analysis of the Transmission Paths of Noise and Vibrations with Non-Stationary Signals. In Proceedings of the International Vibration and Noise Conference, Leuven, Belgium, 20–22 September 2010. [Google Scholar]














© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Csurcsia, P.Z.; Peeters, B.; Schoukens, J.; De Troyer, T. Simplified Analysis for Multiple Input Systems: A Toolbox Study Illustrated on F-16 Measurements. Vibration 2020, 3, 70-84. https://doi.org/10.3390/vibration3020007
Csurcsia PZ, Peeters B, Schoukens J, De Troyer T. Simplified Analysis for Multiple Input Systems: A Toolbox Study Illustrated on F-16 Measurements. Vibration. 2020; 3(2):70-84. https://doi.org/10.3390/vibration3020007
Chicago/Turabian StyleCsurcsia, Péter Zoltán, Bart Peeters, Johan Schoukens, and Tim De Troyer. 2020. "Simplified Analysis for Multiple Input Systems: A Toolbox Study Illustrated on F-16 Measurements" Vibration 3, no. 2: 70-84. https://doi.org/10.3390/vibration3020007
APA StyleCsurcsia, P. Z., Peeters, B., Schoukens, J., & De Troyer, T. (2020). Simplified Analysis for Multiple Input Systems: A Toolbox Study Illustrated on F-16 Measurements. Vibration, 3(2), 70-84. https://doi.org/10.3390/vibration3020007