

Linear Matrix Inequality Approach to Designing Damping and Tracking Control for Nanopositioning Application


Abstract
:1. Introduction
2. Preliminary Definitions
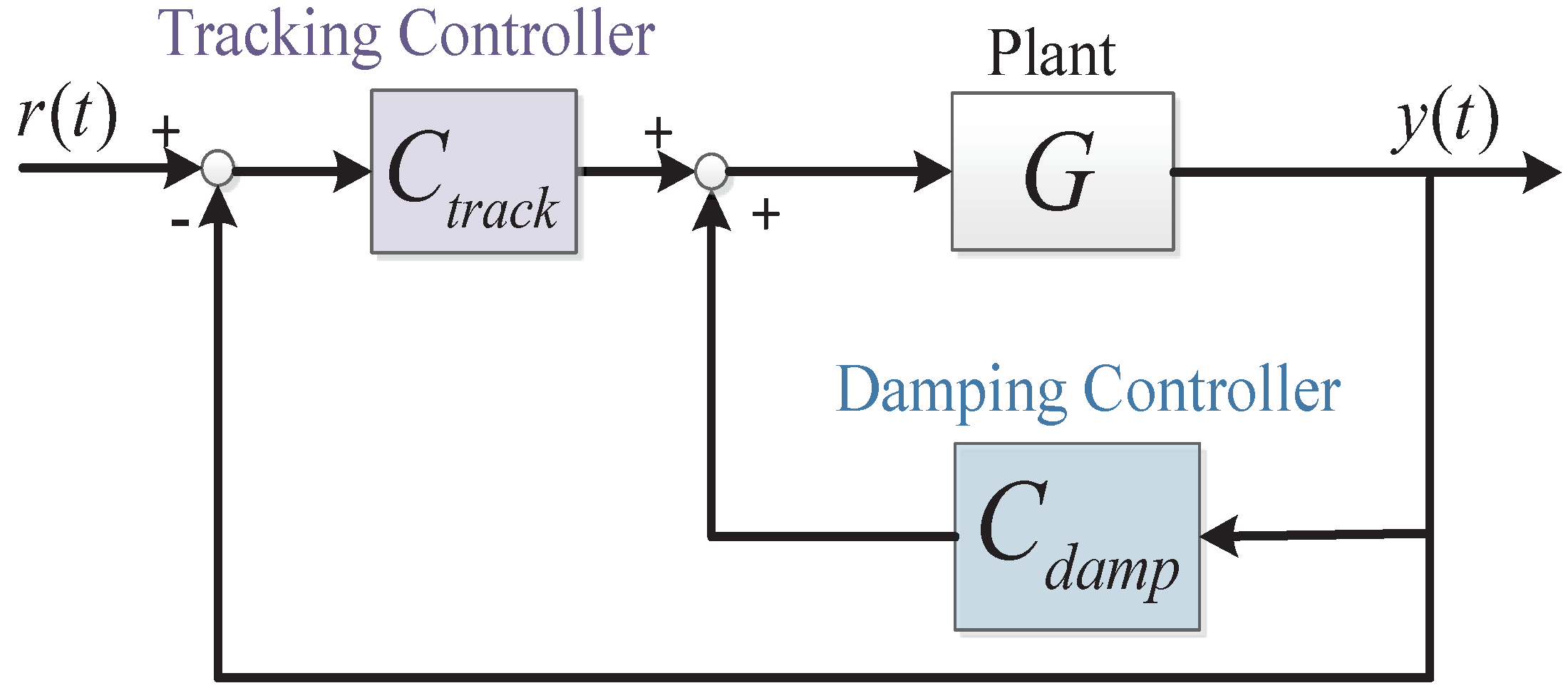
3. Controller Design
3.1. PPF Controller Design
3.2. PVPF and PAVPF Controller Design
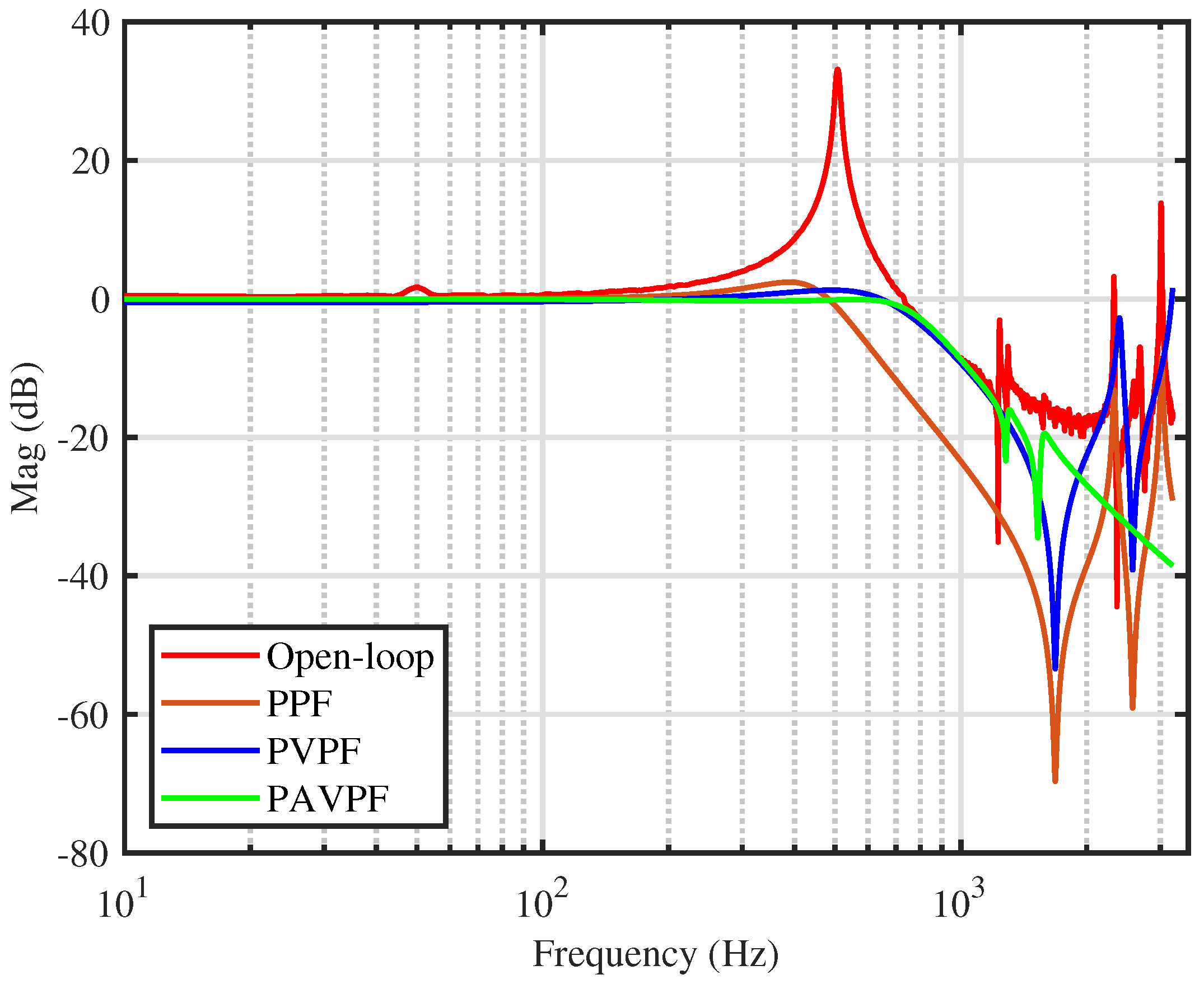
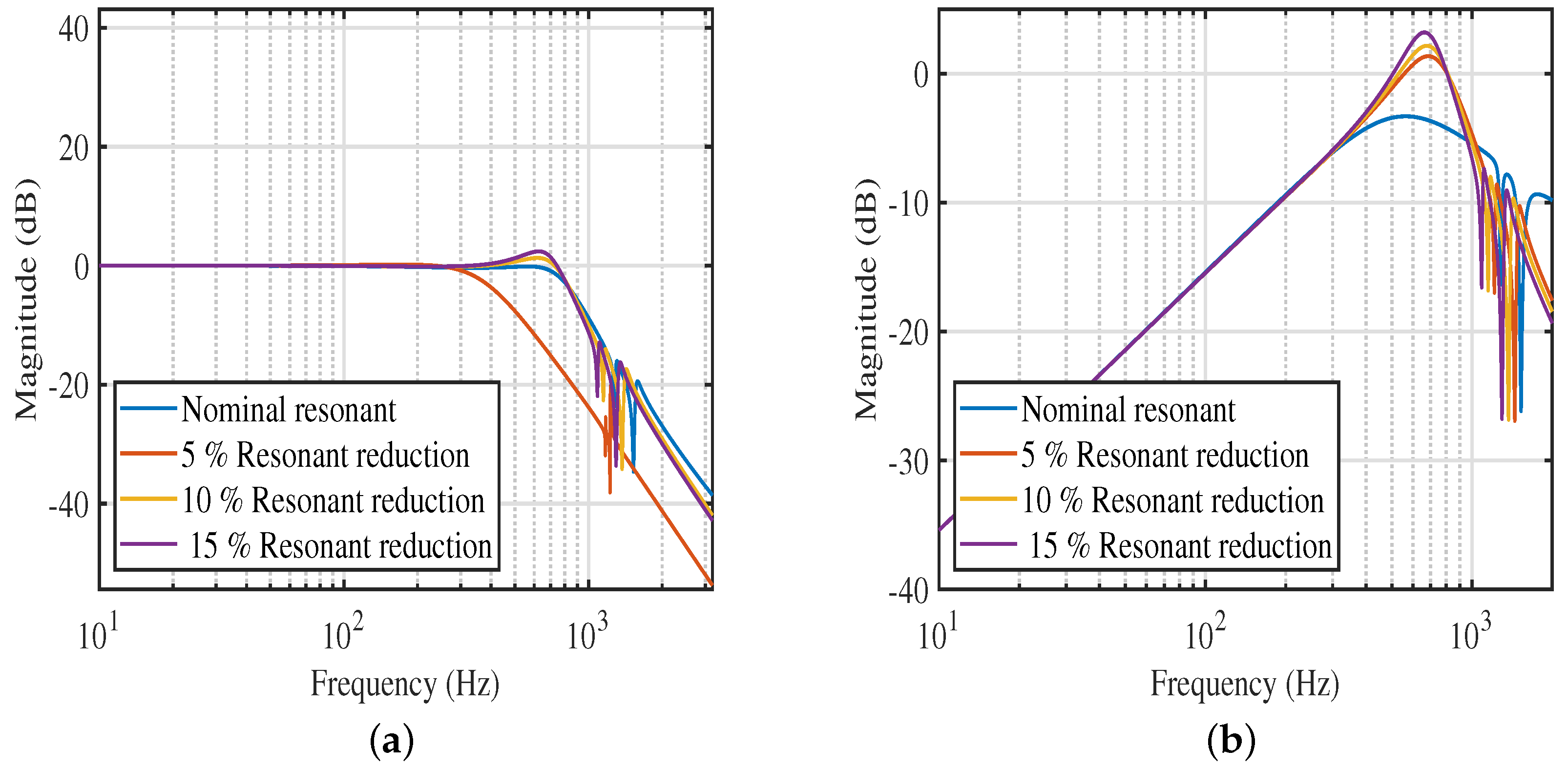
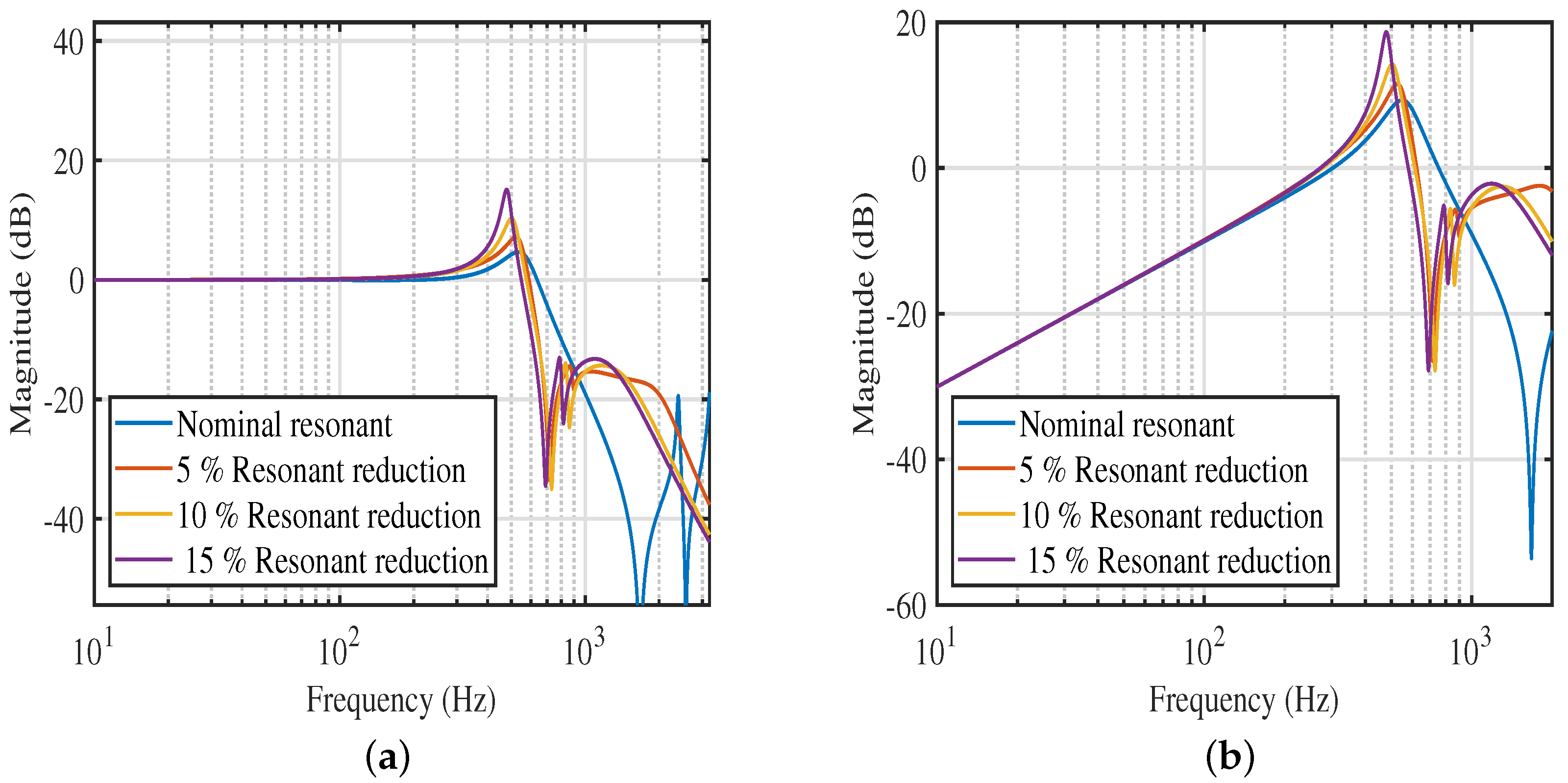
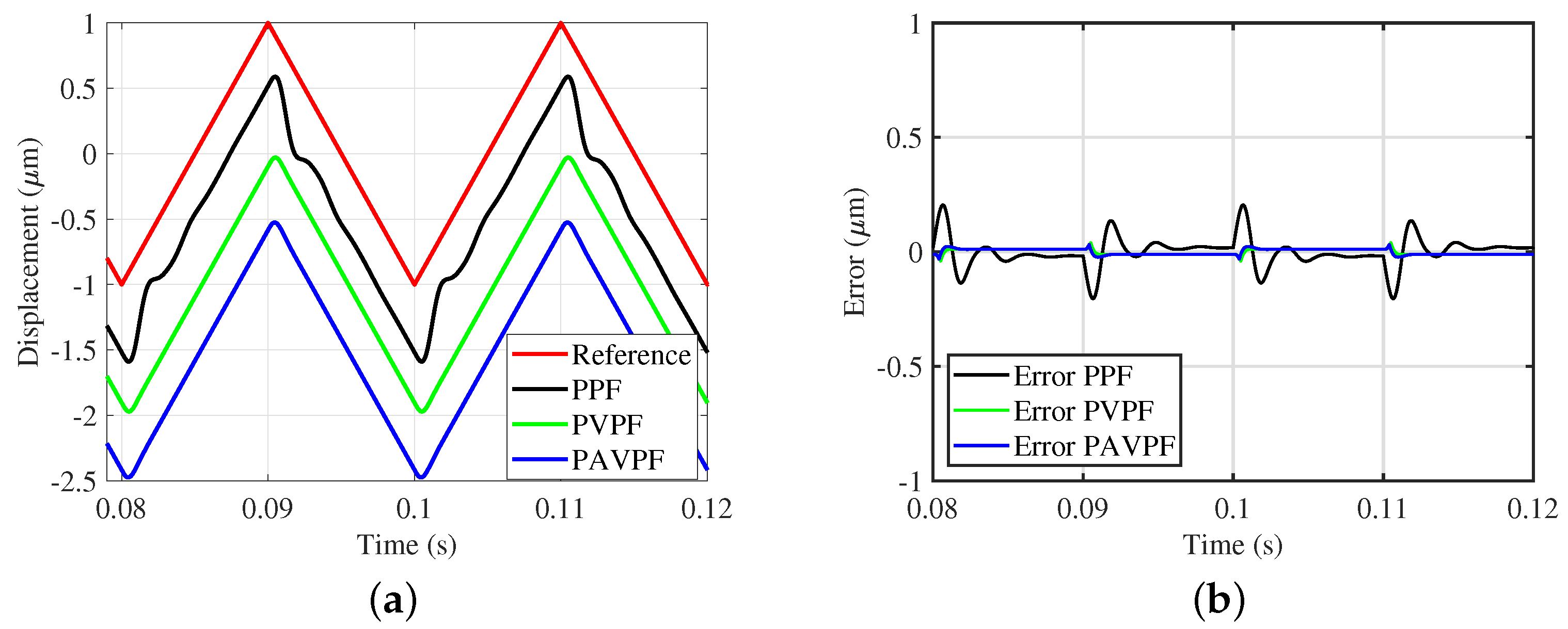
4. Comparative Closed-Loop Performance Evaluation
Closed-Loop Analysis against Frequency-Domain Performance Metrics
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fanson, J.L.; Caughey, T.K. Positive position feedback control for large space structures. AIAA J. 1990, 28, 717–723. [Google Scholar] [CrossRef]
- Bhikkaji, B.; Ratnam, M.; Fleming, A.J.; Moheimani, S.O.R. High-performance control of piezoelectric tube scanners. IEEE Trans. Control Syst. Technol. 2007, 15, 853–866. [Google Scholar] [CrossRef]
- Tao, Y.; Li, L.; Li, H.; Zhu, L. High-Bandwidth Tracking Control of Piezoactuated Nanopositioning Stages via Active Modal Control. IEEE Trans. Autom. Sci. Eng. 2021, 19, 2998–3006. [Google Scholar] [CrossRef]
- Li, L.; Li, C.X.; Gu, G.; Zhu, L.M. Positive acceleration, velocity and position feedback based damping control approach for piezo-actuated nanopositioning stages. Mechatronics 2017, 47, 97–104. [Google Scholar] [CrossRef]
- Syed, H.H. Comparative study between positive position feedback and negative derivative feedback for vibration control of a flexible arm featuring piezoelectric actuator. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417718801. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Chen, H. Adaptive sliding mode control for uncertain active suspension systems with prescribed performance. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 6414–6422. [Google Scholar] [CrossRef]
- Devasia, S.; Eleftheriou, E.; Moheimani, S.O.R. Survey of Control Issues in Nanopositioning. IEEE Trans. Control. Syst. Technol. 2007, 15, 802–823. [Google Scholar] [CrossRef]
- Aphale, S.S.; Bhikkaji, B.; Moheimani, S.O.R. Minimizing scanning errors in piezoelectric stack-actuated nanopositioning platforms. IEEE Trans. Nanotechnol. 2008, 7, 79–90. [Google Scholar] [CrossRef]
- Wang, X.; Li, L.; Zhu, Z.; Zhu, L. Simultaneous damping and tracking control of a normal-stressed electromagnetic actuated nanopositioning stage. Sens. Actuators Phys. 2022, 338, 113467. [Google Scholar] [CrossRef]
- Russell, D.; Fleming, A.J.; Aphale, S.S. Simultaneous Optimization of Damping and Tracking Controller Parameters Via Selective Pole Placement for Enhanced Positioning Bandwidth of Nanopositioners. ASME 2015, 137, 101004. [Google Scholar] [CrossRef]
- Babarinde, A.K.; Li, L.; Zhu, L.; Aphale, S.S. Experimental validation of the simultaneous damping and tracking controller design strategy for high-bandwidth nanopositioning—A PAVPF approach. IET Control Theory Appl. 2020, 14, 3506–3514. [Google Scholar] [CrossRef]
- Visalakshi, V.; Khare, S.; Moheimani, S.O.R.; Bhikkaji, B. Design of Positive Position Feedback Controllers for Collocated Systems. In Proceedings of the American Control Conference (ACC), Atlanta, GA, USA, 25–28 May 2021; pp. 4791–4796. [Google Scholar]
- Mahmoud Abdallah, M.; Fareh, R. Fractional order active disturbance rejection control for trajectory tracking for 4-DOF serial link manipulator. Int. J. Model. Identif. Control. 2020, 36, 57–65. [Google Scholar] [CrossRef]
- Algrnaodi, M.M.; Maarouf Saad, M.; Saad, M.; Fareh, R.; Brahmi, A. Trajectory tracking for mobile manipulator based on nonlinear active disturbance rejection control. Int. J. Model. Identif. Control 2021, 37, 95–105. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | Damping | Tracking | dB Bandwidth (Hz) |
|---|---|---|---|
| PPF + I | 536 | ||
| PVPF + I | 805 | ||
| PAVPF + I | 808 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Babarinde, A.K.; Aphale, S.S. Linear Matrix Inequality Approach to Designing Damping and Tracking Control for Nanopositioning Application. Vibration 2022, 5, 846-859. https://doi.org/10.3390/vibration5040050
Babarinde AK, Aphale SS. Linear Matrix Inequality Approach to Designing Damping and Tracking Control for Nanopositioning Application. Vibration. 2022; 5(4):846-859. https://doi.org/10.3390/vibration5040050
Chicago/Turabian StyleBabarinde, Adedayo K., and Sumeet S. Aphale. 2022. "Linear Matrix Inequality Approach to Designing Damping and Tracking Control for Nanopositioning Application" Vibration 5, no. 4: 846-859. https://doi.org/10.3390/vibration5040050
APA StyleBabarinde, A. K., & Aphale, S. S. (2022). Linear Matrix Inequality Approach to Designing Damping and Tracking Control for Nanopositioning Application. Vibration, 5(4), 846-859. https://doi.org/10.3390/vibration5040050