
Railway Track Irregularity Estimation Using Car Body Vibration: A Data-Driven Approach for Regional Railway


Abstract
:1. Introduction
2. Measurement System and Procedure for Estimating Track Irregularities
2.1. Onboard Sensing Device and Track Condition Monitoring System
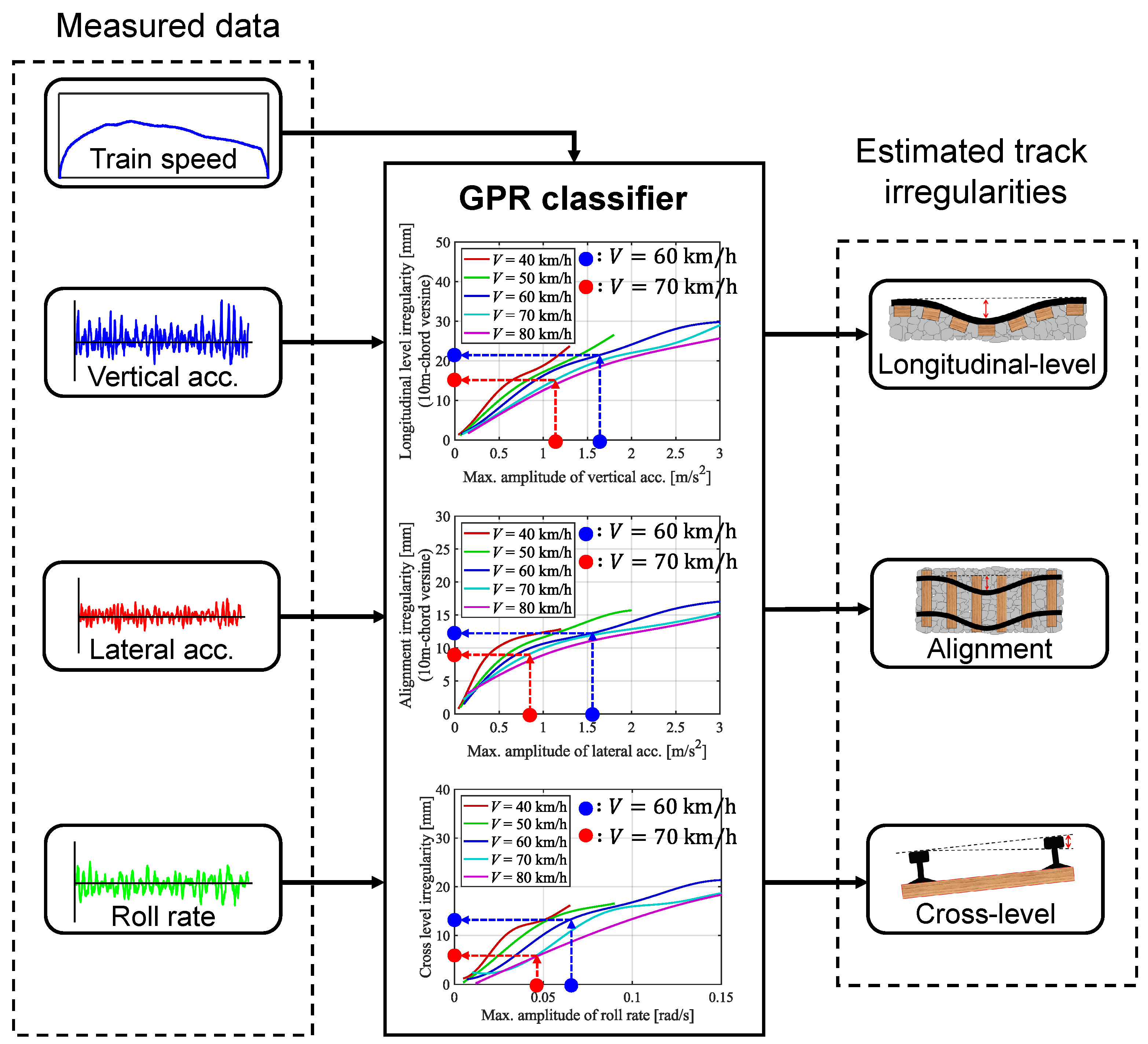
2.2. Procedure for Estimating Track Irregularities
- 1.
- A railway vehicle model is prepared with multibody dynamics.
- 2.
- From the track irregularity power spectrum density (PSD), we generate track geometries for the profile, alignment, and cross-level.
- 3.
- The longitudinal-level and alignment irregularities are calculated using the 10 m-chord versine method.
- 4.
- The vehicle model is travelled on a track with the generated track geometries, and the vertical acceleration, lateral acceleration, and roll rate are calculated.
- 5.
- A dataset is created with the calculated maximum value of the car body vibration as input x and track irregularity as output y.
- 6.
- GPR is applied to the dataset to create a regression model.
- 7.
- The measured car body vibration of the actual vehicle is input into the constructed regression model to statistically estimate the track irregularity.
3. Generation of Track Irregularity and Car Body Vibration
3.1. Overview of the Simulation
3.2. Vehicle Model
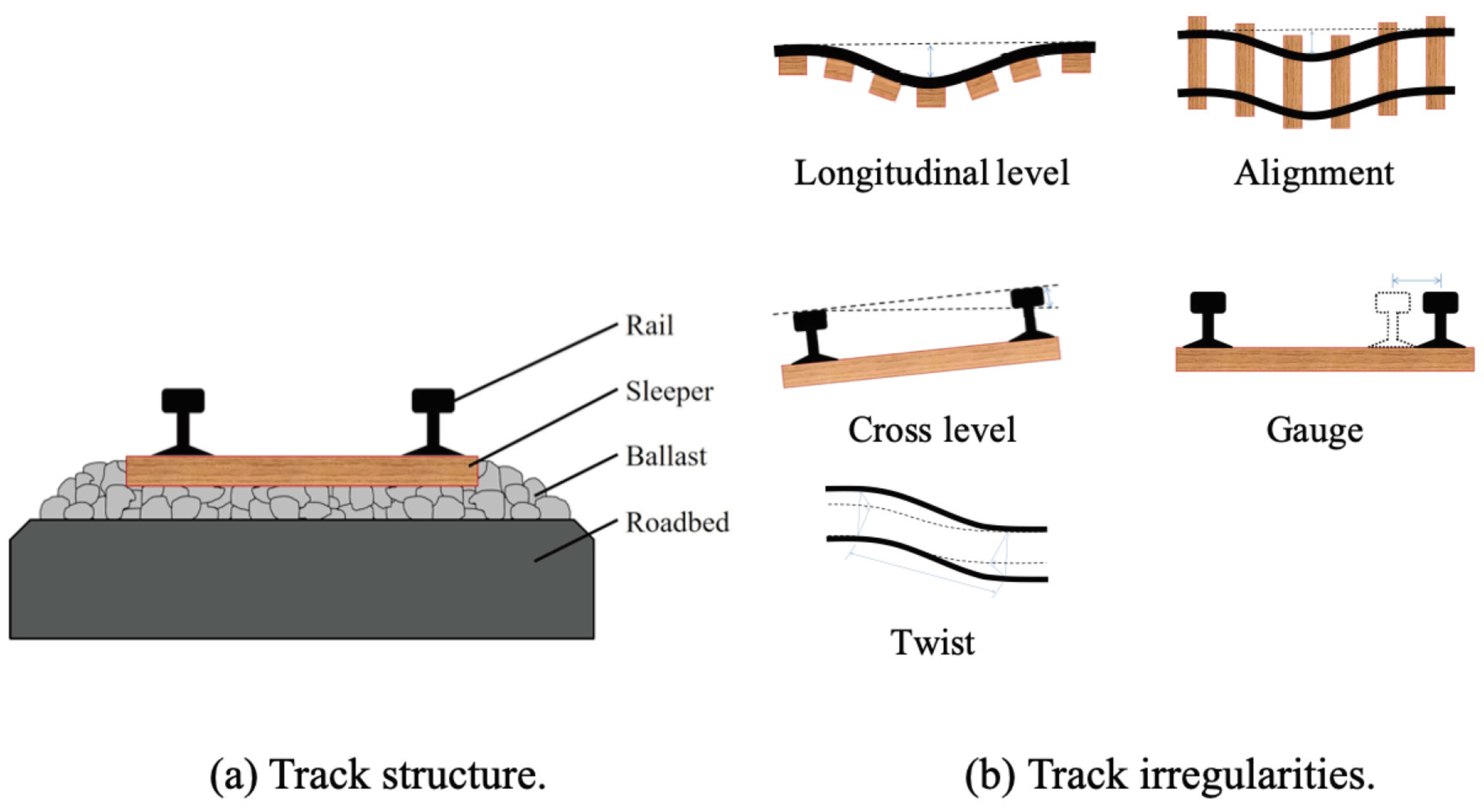
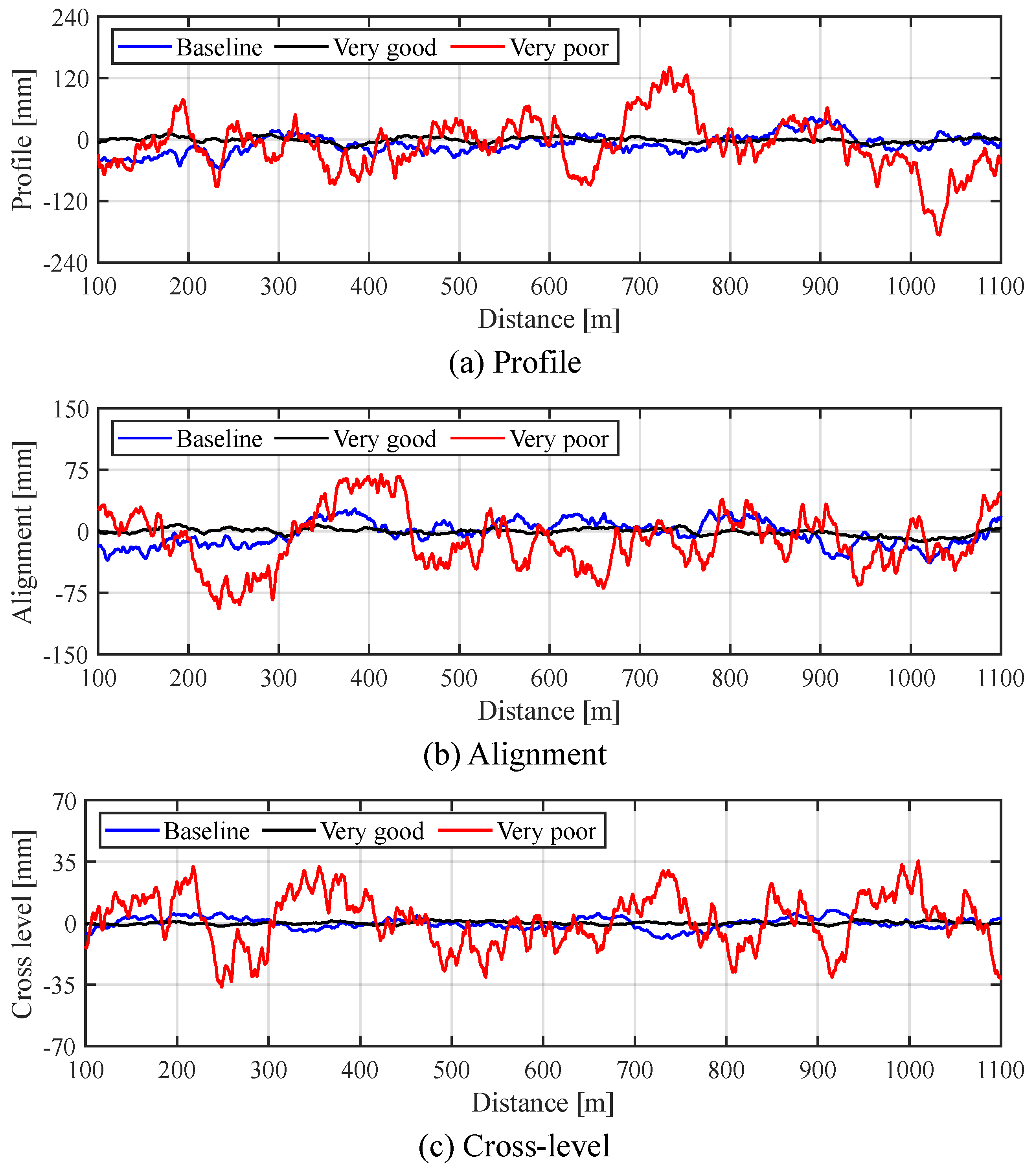
3.3. Track Model
- Profile
- Alignment
- Cross-levelwhere the following is true:
- : PSD of track geometry ;
- : spatial angular frequency [rad/m];
- : critical spatial angular frequency [rad/m];
- a: half of the nominal rolling circle distance of the wheel;
- : roughness coefficients for track geometry.
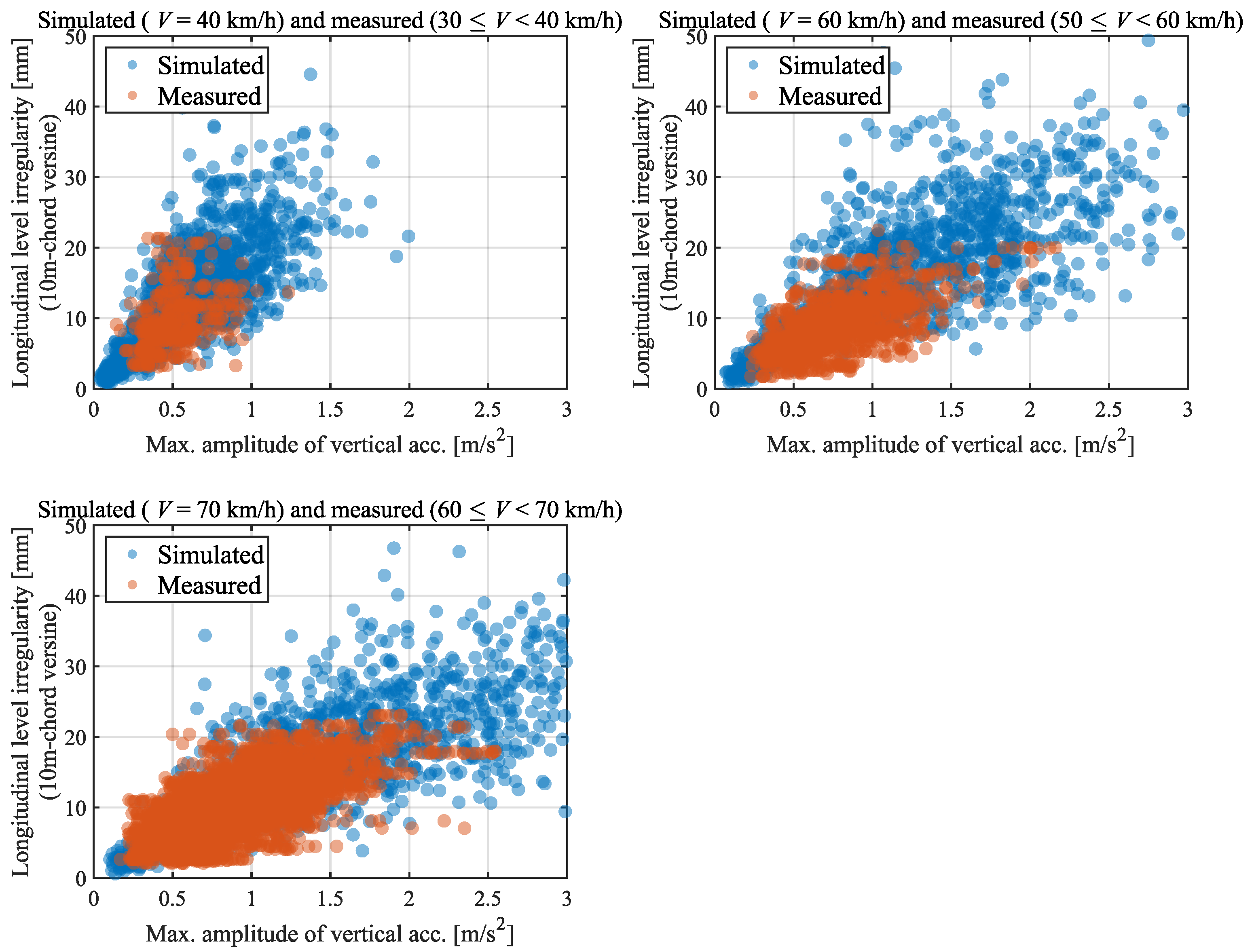
3.4. Evaluation of Simulation Model
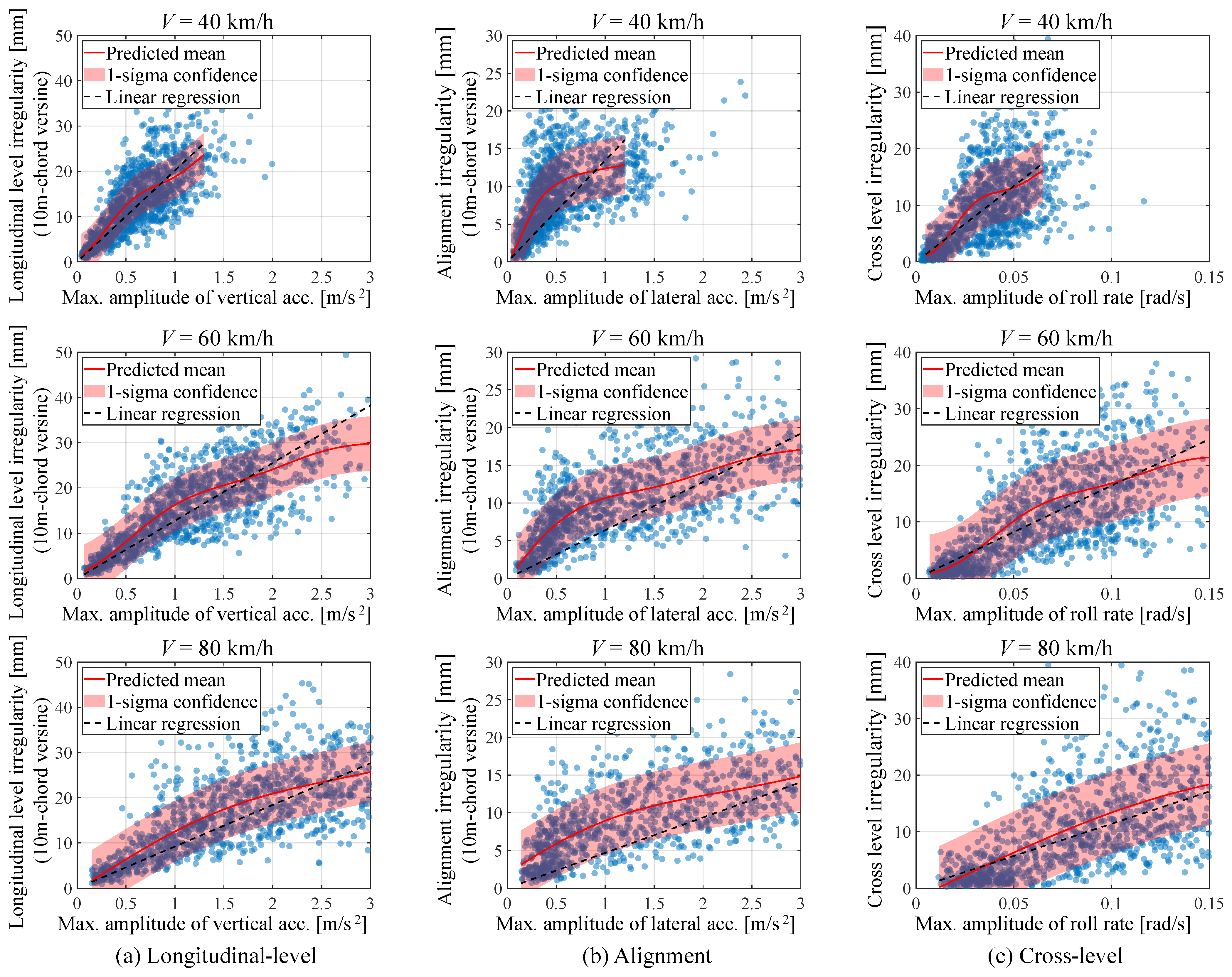
3.5. Relation between Car Body Vibration and Track Irregularity
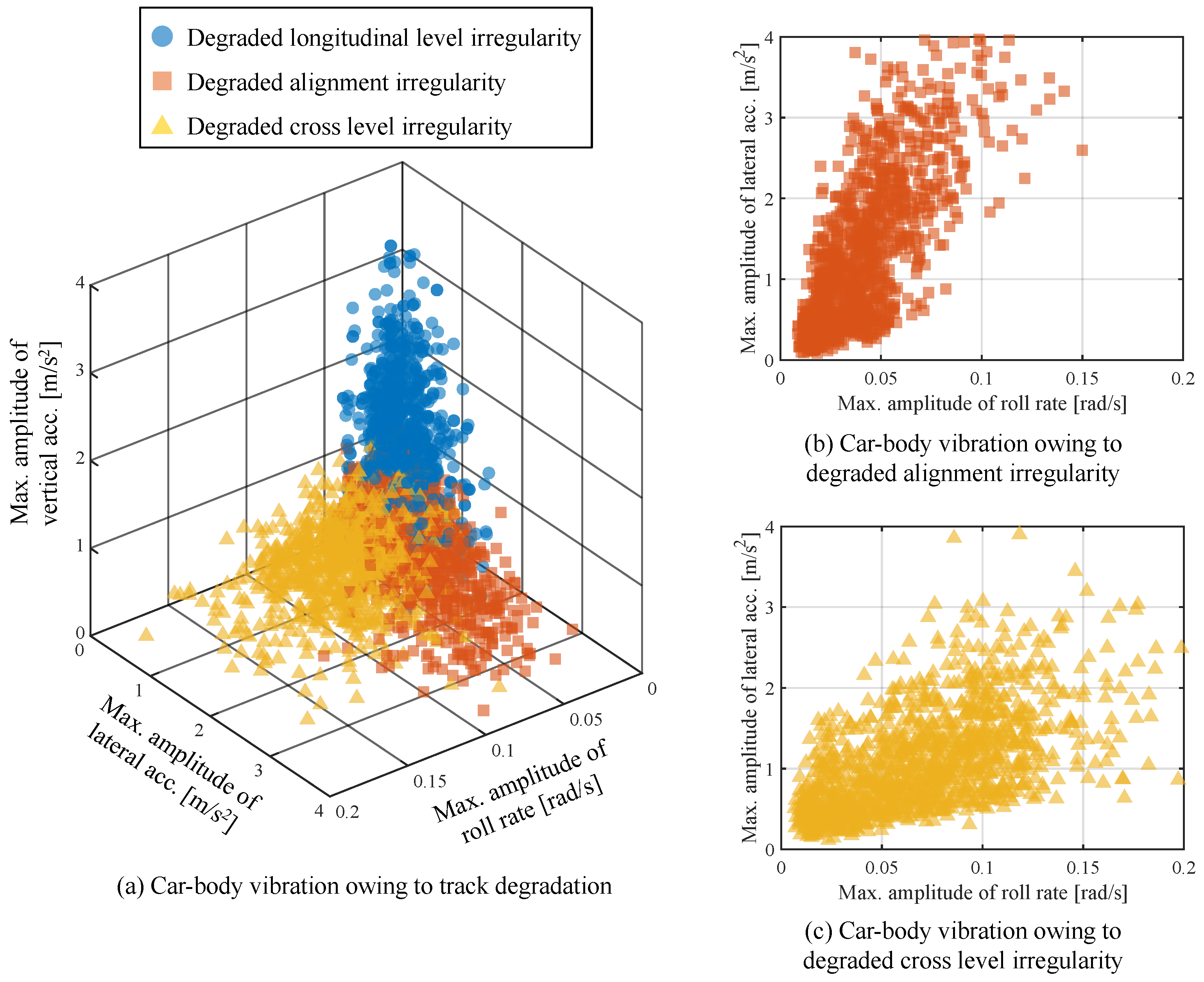
3.5.1. Feature Space Consisting of Car Body Vibration
- Case 1: Tracks in which only the longitudinal-level irregularity is statistically varied,
- Case 2: Tracks in which only the alignment irregularity is statistically varied,
- Case 3: Tracks in which only the cross-level irregularity is statistically varied.
3.5.2. Construction of a Dataset Comprising Car Body Vibration and Track Irregularities
4. Regression Analysis of Car Body Vibration and Track Irregularity
4.1. Gaussian Process Regression (GPR)
4.2. Track Irregularity Estimation Using Gaussian Process Regression
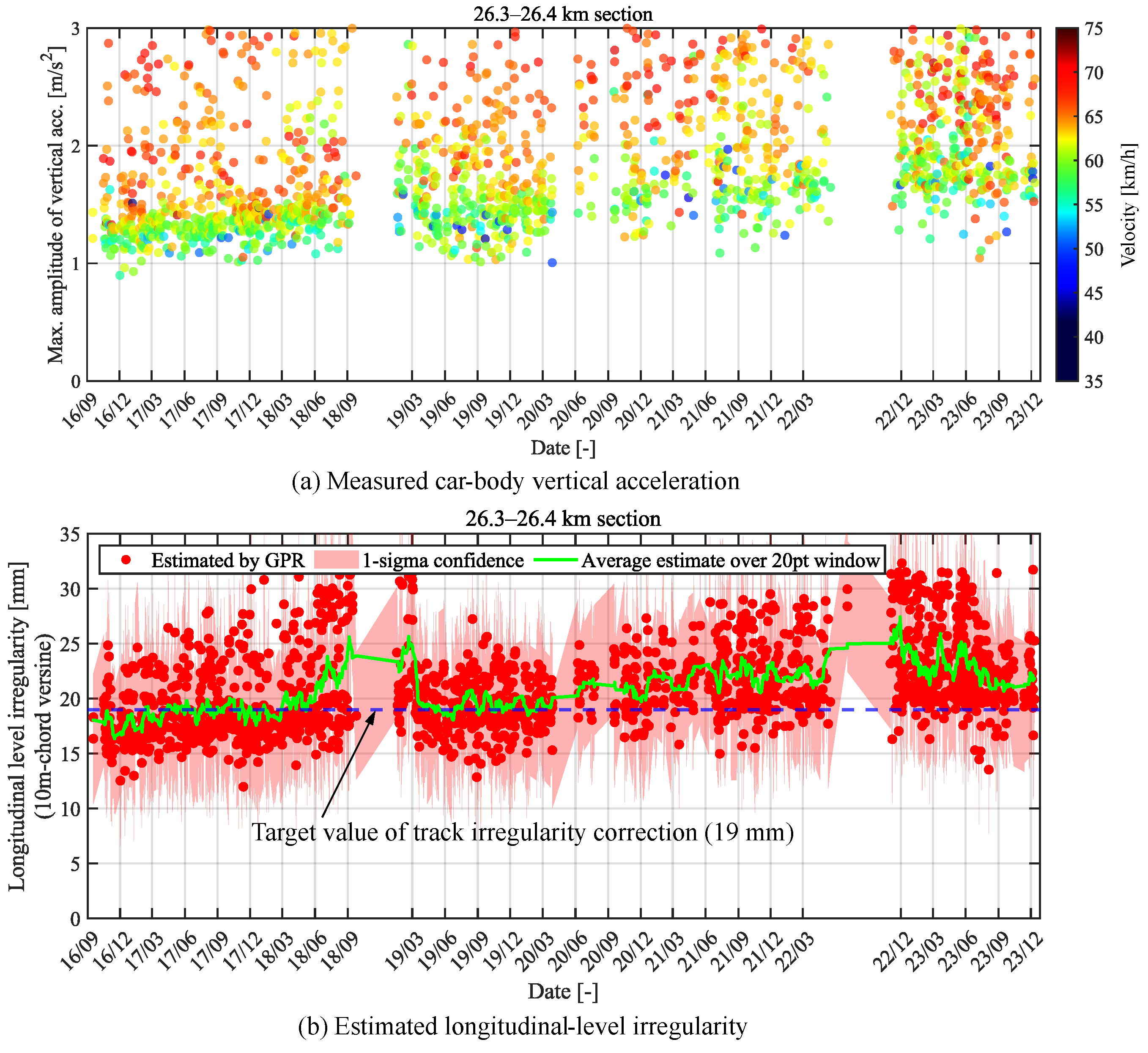
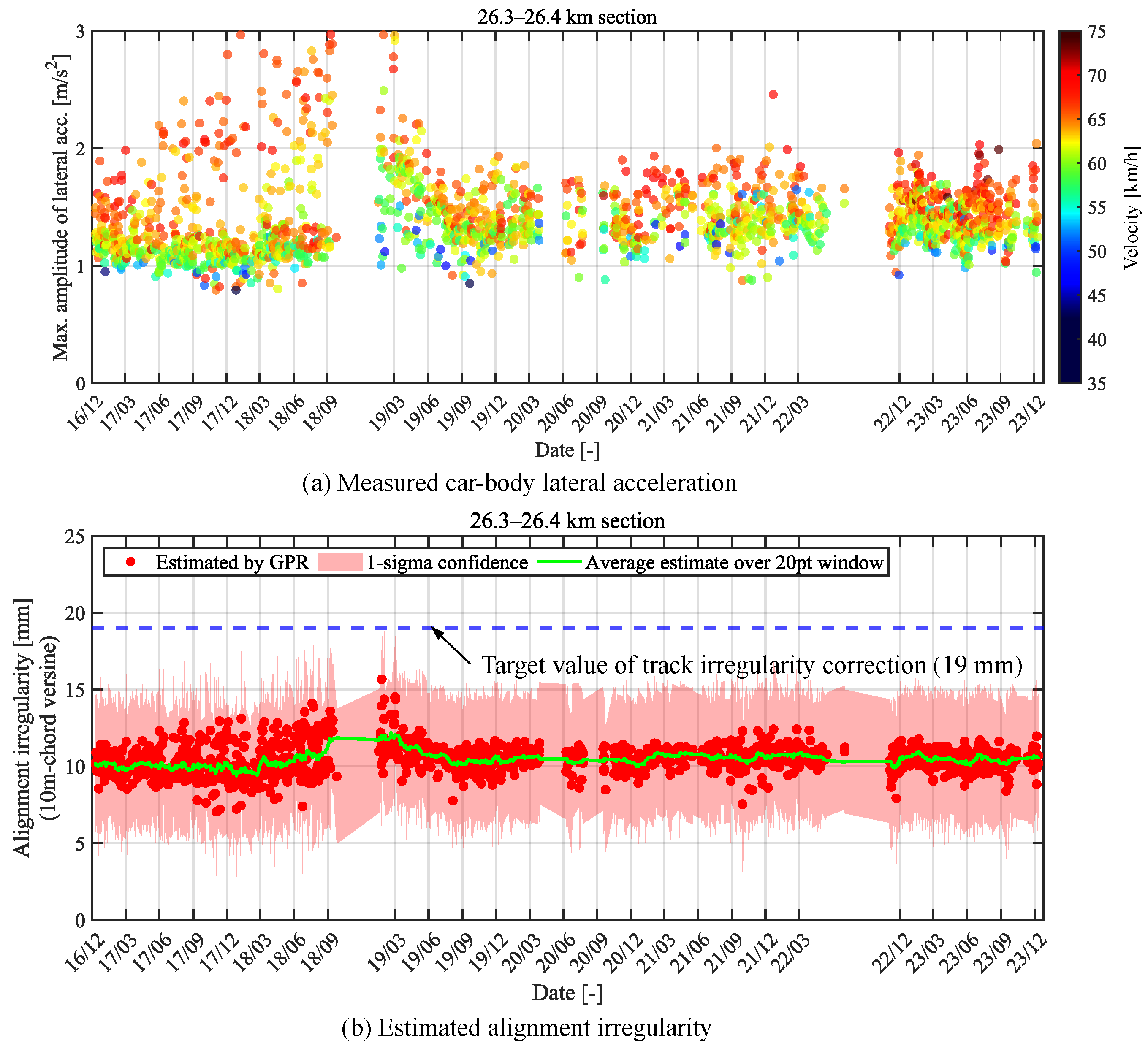
5. Application to Track-Condition Monitoring in a Regional Railway
5.1. Track Irregularity Estimation Procedure and Results
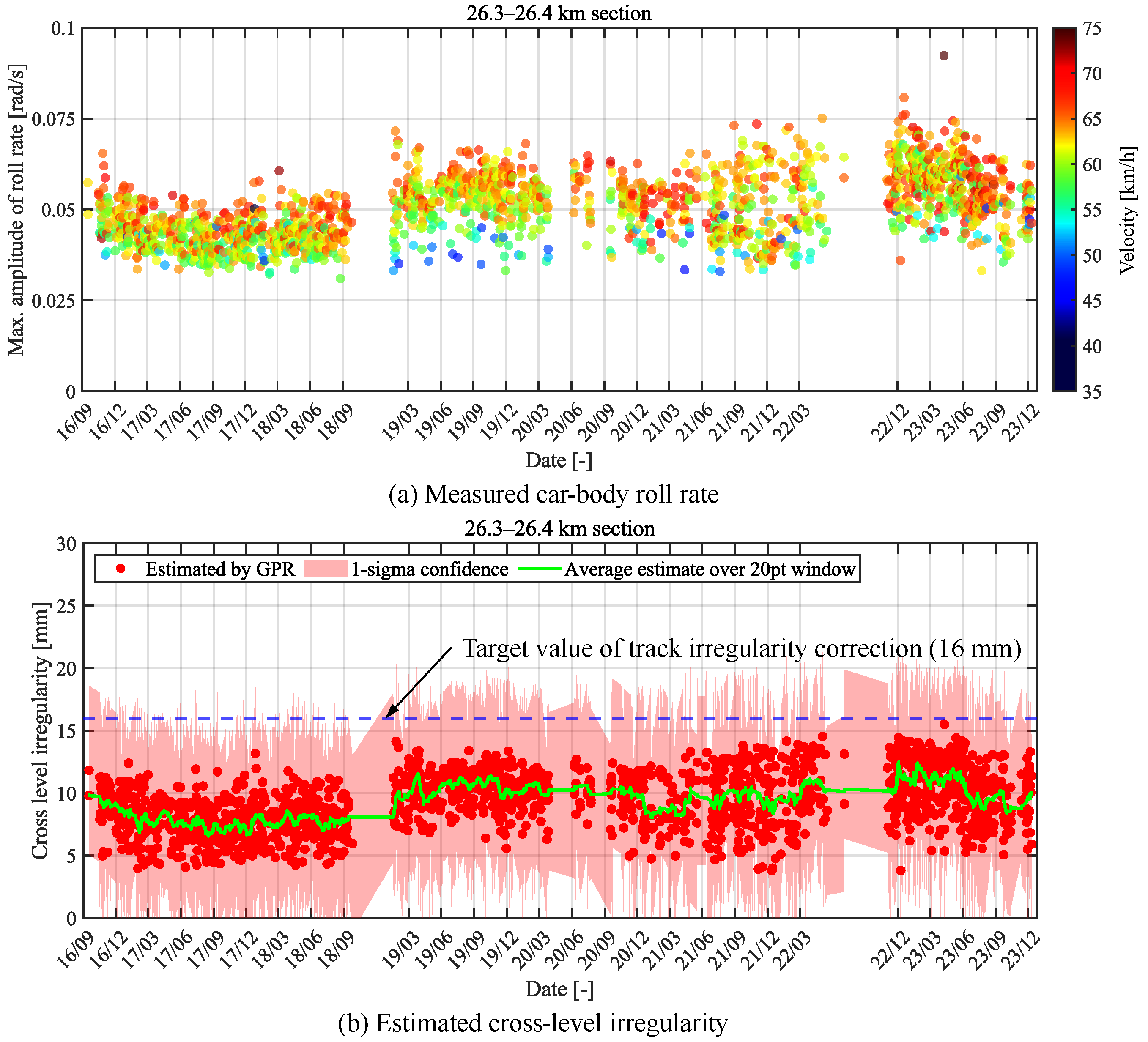
5.2. Estimation of Changes in Track Irregularities
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GNSS | global navigation satellite system |
| PSD | power spectral density |
| GPR | Gaussian process regression |
References
- Naseri, R.; Mohammadzadeh, S.; Rizos, D.C. Rail surface spot irregularity effects in vehicle-track interaction simulations of train-track-bridge interaction. J. Vib. Control. 2024. [Google Scholar] [CrossRef]
- Song, Y.; Liu, Z.; Gao, S. Current Collection Quality of High-speed Rail Pantograph-catenary Considering Geometry Deviation at 400 km/h and Above. IEEE Trans. Veh. Technol. 2024. [Google Scholar] [CrossRef]
- Tsunashima, H.; Mori, H.; Ogino, M.; Asano, A. Development of Track Condition Monitoring System Using Onboard Sensing Device. In Railway Research; Zboinski, K., Ed.; InTech: London, UK, 2015. [Google Scholar]
- Tsunashima, H. Condition Monitoring of Railway Tracks from Car-Body Vibration Using a Machine Learning Technique. Appl. Sci. 2019, 9, 2734. [Google Scholar] [CrossRef]
- Tsunashima, H.; Hirose, R. Condition monitoring of railway track from car-body vibration using time-frequency analysis. Veh. Syst. Dyn. 2020, 60, 1170–1187. [Google Scholar] [CrossRef]
- Weston, P.; Roberts, C.; Yeo, G.; Stewar, E. Perspectives on railway track geometry condition monitoring from in-service railway vehicles. Veh. Syst. Dyn. 2015, 53, 1063–1091. [Google Scholar] [CrossRef]
- Chen, X.; Chai, X.; Cao, X. The time-frequency analysis of the train axle box acceleration signals using empirical mode decomposition. Comput. Model New Technol. 2014, 18, 356–360. [Google Scholar]
- Karis, T.; Berg, M.; Stichel, S. Correlation of track irregularities and vehicle responses based on measured data. Veh. Syst. Dyn. 2018, 56, 967–981. [Google Scholar] [CrossRef]
- Tsai, H.C.; Wang, C.Y.; Huang, N.E. Railway track inspection based on the vibration response to a scheduled train and the Hilbert–Huang transform. Proc. Inst. Mech. Eng. F. J. Rail Rapid Transit. 2014, 229, 815–829. [Google Scholar] [CrossRef]
- Sun, X.; Fei, Y.; Shi, J.; Zaitian, K.; Yunlai, Z. On-Board Detection of Longitudinal Track Irregularity. IEEE Access 2021, 9, 14025–14037. [Google Scholar] [CrossRef]
- Chudzikiewicz, A.; Bogacz, R.; Kostrzewski, M.; Konowrocki, R. Condition monitoring of railway track systems by using acceleration signals on wheelset axle-boxes. Transport 2019, 33, 555–566. [Google Scholar] [CrossRef]
- Westeon, P.F.; Ling, C.S.; Roberts, C.; Goodman, C.J.; Li, P.; Goodall, R.M. Monitoring vertical track irregularity from in-service railway vehicles. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit. 2007, 221, 75–88. [Google Scholar] [CrossRef]
- Weston, P.F.; Ling, C.S.; Goodman, C.J.; Roberts, C.; Li, P.; Goodall, R.M. Monitoring lateral track irregularity from in-service railway vehicles. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit. 2007, 221, 89–100. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Obrien, E.; Quirke, P.; Bowe, C. Railway Track Monitoring Using Train Measurements: An Experimental Case Study. Appl. Sci. 2019, 9, 4859. [Google Scholar] [CrossRef]
- Tsunashima, H.; Ono, H.; Takata, T.; Ogata, S. Development and Operation of Track Condition Monitoring System Using In-Service Train. Appl. Sci. 2023, 13, 3835. [Google Scholar] [CrossRef]
- Ono, H.; Tsunashima, H.; Takata, T.; Ogata, S. Development and operation of a system for diagnosing the condition of regional railways tracks. Mech. Eng. J. 2023, 10, 22-00239. [Google Scholar] [CrossRef]
- Bai, L.; Liu, R.; Li, Q. Data-driven bias correction and defect diagnosis model for in-service vehicle acceleration measurements. Sensors 2020, 20, 872. [Google Scholar] [CrossRef] [PubMed]
- Wei, X.; Liu, F.; Jia, L. Urban rail track condition monitoring based on in-service vehicle acceleration measurements. Measurement 2016, 80, 21–228. [Google Scholar] [CrossRef]
- Balouchi, F.; Bevan, A.; Formston, R. Development of railway track condition monitoring from multi-train in-service vehicles. Veh. Syst. Dyn. 2021, 59, 1397–1417. [Google Scholar] [CrossRef]
- Chellaswamy, C.; Geetha, T.S.; Vanathi, A.; Venkatachalam, K. An IoT based rail track condition monitoring and derailment prevention system. Int. J. Technol. 2020, 11, 81–107. [Google Scholar] [CrossRef]
- Rodríguez, A.; Sanudo, S.; Miranda, M.; Gomez, A.; Benavente, J. Smartphones and tablets applications in railways, ride comfort and track quality. Transition zones analysis. Measurement 2021, 182, 109644. [Google Scholar] [CrossRef]
- Cong, J.; Gao, M.; Miranda, M.; Wang, Y.; Chen, R.; Wang, P. Subway rail transit monitoring by built-in sensor platform of smartphone. Front. Inf. Technol. Electron. Eng. 2020, 21, 1226–1238. [Google Scholar] [CrossRef]
- Paixão, A.; Fortunato, E.; Calçada, R. Smartphone’s Sensing Capabilities for On-Board Railway Track Monitoring: Structural Performance and Geometrical Degradation Assessment. Adv. Civ. Eng. 2019, 2019, 1729153. [Google Scholar] [CrossRef]
- Tsunashima, H.; Honda, R.; Matsumoto, A. Track Condition Monitoring Based on In-Service Train Vibration Data Using Smartphones. In Civil Engineering; Hessami, G., Muttram, R., Eds.; InTech: London, UK, 2024. [Google Scholar]
- Odashima, M.; Azami, S.; Naganuma, Y.; Mori, H.; Tsunahsima, H. Track geometry estimation of a conventional railway from car-body acceleration measurement. Mech. Eng. J. 2017, 4, 16-00498. [Google Scholar] [CrossRef]
- Xiao, X.; Zhe Sun, Z.; Shen, W. A Kalman filter algorithm for identifying track irregularities of railway bridges using vehicle dynamic responses. Mech. Syst. Signal Process. 2020, 138, 106582. [Google Scholar] [CrossRef]
- Paglia, L.; Reyes, A.; Gialleonar, D.; Facchinetti, A.; Carnevale, M. A speed-dependent condition monitoring system for track geometry estimation using inertial measurements. In Proceedings of the 28th IAVSD International Symposium on Dynamics of Vehicles on Roads and Tracks, Ottawa, ON, Canada, 21–25 August 2023. [Google Scholar]
- Tsunashima, H. Data-driven track irregularity estimation technique using car-body vibration. In Proceedings of the 28th IAVSD International Symposium on Dynamics of Vehicles on Roads and Tracks, Ottawa, ON, Canada, 21–25 August 2023. [Google Scholar]
- Claus, H.; Schiehlen, W. Modeling and simulation of railway bogie structural vibrations. Veh. Syst. Dyn. 1998, 29 (Suppl. 1), 538–552. [Google Scholar] [CrossRef]
- Wang, D.H.; Liao, W.H. Semi-active suspension systems for railway vehicles using magnetorheological dampers. Part I: System integration and modelling. Veh. Syst. Dyn. 2009, 47, 1305–1325. [Google Scholar] [CrossRef]
- Berawi, A. Improving Railway Track Maintenance Using Power Spectral Density (PSD). Doctoral Dissertation, University of The University of Porto, Porto, Portugal, August 2013. Available online: https://api.semanticscholar.org/CorpusID:111822997 (accessed on 1 July 2024).
- Wang, J. An Intuitive Tutorial to Gaussian Processes Regression. arXiv 2009, arXiv:2009.10862. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Unit | Value |
|---|---|---|
| Car body mass | kg | 25,000 |
| Bogie mass | kg | 3100 |
| Wheelset mass | kg | 1500 |
| Car body inertia about x axis | 49,000 | |
| Car body inertia about y axis | 900,000 | |
| Car body inertia about z axis | 841,000 | |
| Bogie inertia about x axis | 2511 | |
| Bogie inertia about y axis | 1743.75 | |
| Bogie inertia about z axis | 1743.75 | |
| Wheelset inertia about x axis | 735 | |
| Wheelset inertia about y axis | 93.75 | |
| Wheelset inertia about z axis | 735 | |
| Car body base | m | 14 |
| Wheel base | m | 2.1 |
| Gauge | m | 1.067 |
| Wheel radius | m | 0.43 |
| Primary suspension vertical stiffness | kN/m | 12,000 |
| Secondary suspension vertical stiffness | kN/m | 400 |
| Primary suspension lateral stiffness | kN/m | 6000 |
| Secondary suspension lateral stiffness | kN/m | 150 |
| Primary suspension longitudinal stiffness | kN/m | 8000 |
| Secondary suspension longitudinal stiffness | kN/m | 1000 |
| Primary suspension vertical damping | kNs/m | 40 |
| Secondary suspension vertical damping | kNs/m | 14 |
| Primary suspension lateral damping | kNs/m | 40 |
| Secondary suspension lateral damping | kNs/m | 180 |
| Primary suspension longitudinal damping | kNs/m | 40 |
| Secondary suspension longitudinal damping | kNs/m | 14 |
| Parameters | Very Good | Baseline | Very Poor |
|---|---|---|---|
| [rad/m] | 0.8 | 0.8 | 0.8 |
| [rad/m] | 0.02 | 0.02 | 0.02 |
| [rad/m] | 0.01 | 0.01 | 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsunashima, H.; Yagura, N. Railway Track Irregularity Estimation Using Car Body Vibration: A Data-Driven Approach for Regional Railway. Vibration 2024, 7, 928-948. https://doi.org/10.3390/vibration7040049
Tsunashima H, Yagura N. Railway Track Irregularity Estimation Using Car Body Vibration: A Data-Driven Approach for Regional Railway. Vibration. 2024; 7(4):928-948. https://doi.org/10.3390/vibration7040049
Chicago/Turabian StyleTsunashima, Hitoshi, and Nozomu Yagura. 2024. "Railway Track Irregularity Estimation Using Car Body Vibration: A Data-Driven Approach for Regional Railway" Vibration 7, no. 4: 928-948. https://doi.org/10.3390/vibration7040049
APA StyleTsunashima, H., & Yagura, N. (2024). Railway Track Irregularity Estimation Using Car Body Vibration: A Data-Driven Approach for Regional Railway. Vibration, 7(4), 928-948. https://doi.org/10.3390/vibration7040049