
Monitoring and Forecasting of Key Functions and Technologies for Automated Driving


Abstract
:1. Introduction
1.1. Literature Review
- (1)
- Monitoring uses a large amount of information to inform a prediction of the development of technologies. Among others, methods of bibliometrics (patents and publications) [9,10,11,12,13,14,15,16,17], text mining [10,12,17,18] and social network analysis (SNA) [19,20] are used [6,7]. Text mining consists of the extraction of information from natural language sources. It is often combined with patent and publication analyses. Publication analyses use meta or content information, while patent analyses use structured patent classification data in addition [6,16]. The authors of [9] use patent analysis to identify technological areas relevant to self-driving vehicles. The authors of [10] also address self-driving technology but examine publications in addition to patents and further employ text mining. Both studies identify relevant technologies for self-driving vehicles but lack information on their temporal development. The authors of [11] use patents to derive the life cycle stages of technologies, thus providing information on their temporal development. In SNAs, linkages between different actors in a domain are examined in order to derive developments in the network. In [20], the author shows the connections of different automotive trends in a network based on a preceding patent analysis. Since this requires high computing effort, only patent abstracts were used. In [19], the authors identify analogous technologies from bibliometrics and SNA in order to subsequently derive the future development of various technologies of autonomous vehicles via S-curve models. The methods vary significantly in complexity depending on their implementation. SNAs and text mining requires in-depth knowledge of coding and machine learning.
- (2)
- Trend analysis and statistical methods use historical data to project future developments [6,7]. Trend analysis extrapolates past information, with the selection of the correct fitting curve significantly influencing the result [6]. In S-curve approaches, future developments are projected using growth curves of established technology. This approach generally performs well when life-cycle models of similar technologies are available [7]. These methods often build on those also applied for monitoring technologies, e.g., [11,19] (see above). In [21], the authors apply the web search analysis method: it examines web search traffic data on fuel cell vehicles to derive an indication of life cycle curves.
- (3)
- In case of insufficient quantitative or structured information available, expert elicitation methods are commonly used: interviews, surveys, Delphi surveys, workshops etc. [6,7,8]. While these are generally inexpensive and straightforward to implement, setting up a qualitatively and quantitatively adequate panel of experts is challenging. Moreover, experts’ opinions are subjective and can be incorrect [6]. Among expert surveys, Delphi surveys are most popular [8]: multiple experts are surveyed anonymously in several iterative rounds. Consolidated feedback of other experts’ opinions provided following each iteration can lead to changing experts’ opinions during the process; consensus may be created after several rounds. Compared to other expert methods, a well-conducted Delphi survey can increase the reliability of the results [22]. In the automotive sector, Refs. [23,24] use Delphi surveys to derive statements on drivers and barriers of car sharing as well as short-, medium- and long-term technological developments of sustainable production, respectively.
- (4)
- Models or simulations simplify real-world systems to derive insights and statements about their future behavior. Building reliable models is usually expensive and complex but provides the possibility to investigate developments in the context of changing conditions. Systems dynamics and agent-based modeling can, in contrast to simpler input-output models, simulate interactions in a complex environment and incorporate uncertainties [6,7,8]. In [25,26,27] the authors use models to simulate the development of the electric vehicle market. The authors of [28,29] simulate the market uptake of autonomous vehicles. The quality of the results strongly depends on the quality of the input data [8].
- (5)
- Scenarios represent possible conceptions of the future considering different assumptions. This allows a flexible representation of a range of future possibilities, even if the data basis is weak [6,7,8]. For example, Ref. [30] has conducted several workshops with experts to develop different scenarios for the introduction of autonomous vehicles and their implications on mobility behavior. However, scenarios are highly speculative and thus generally more unreliable than other technology forecasting methods [6,7,8].
1.2. Contribution of This Paper
- (1)
- (2)
- The complexity of the method should be appropriate for the user. The authros of [42] identify a need for “easily comprehensible, timely, and cheap sources of [technology forecasting] for small companies,” which may not be the case for sophisticated simulation models, software-based SNA and text mining.
- (3)
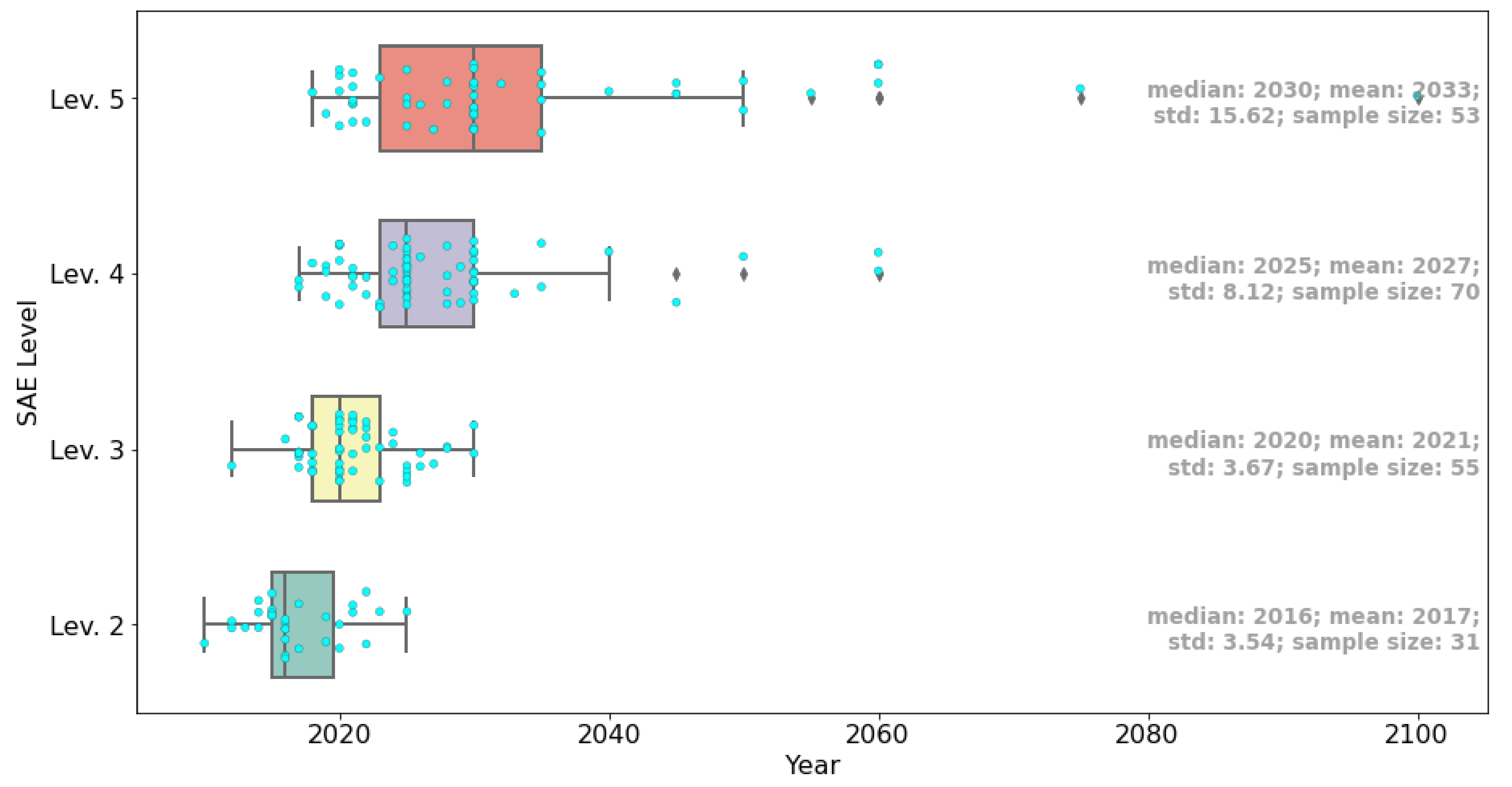
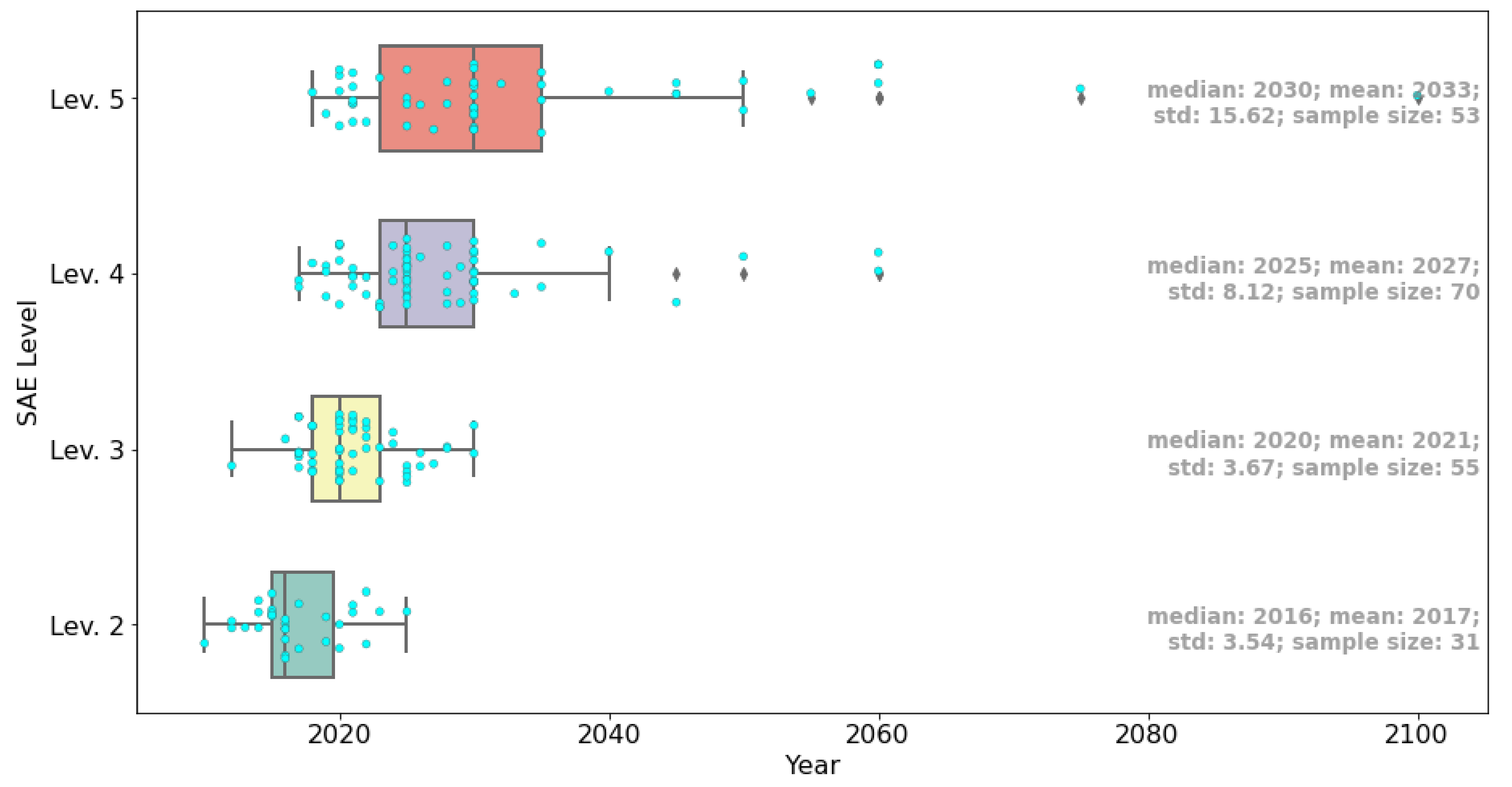
- A broader range of technologies required to achieve functions of self-driving vehicles should be examined, not only singular technologies. Depending on the level of detail, functions may represent different levels of automation (SAE level) or, with higher granularity, functions such as lane keep assist or adaptive cruise control.
- (4)
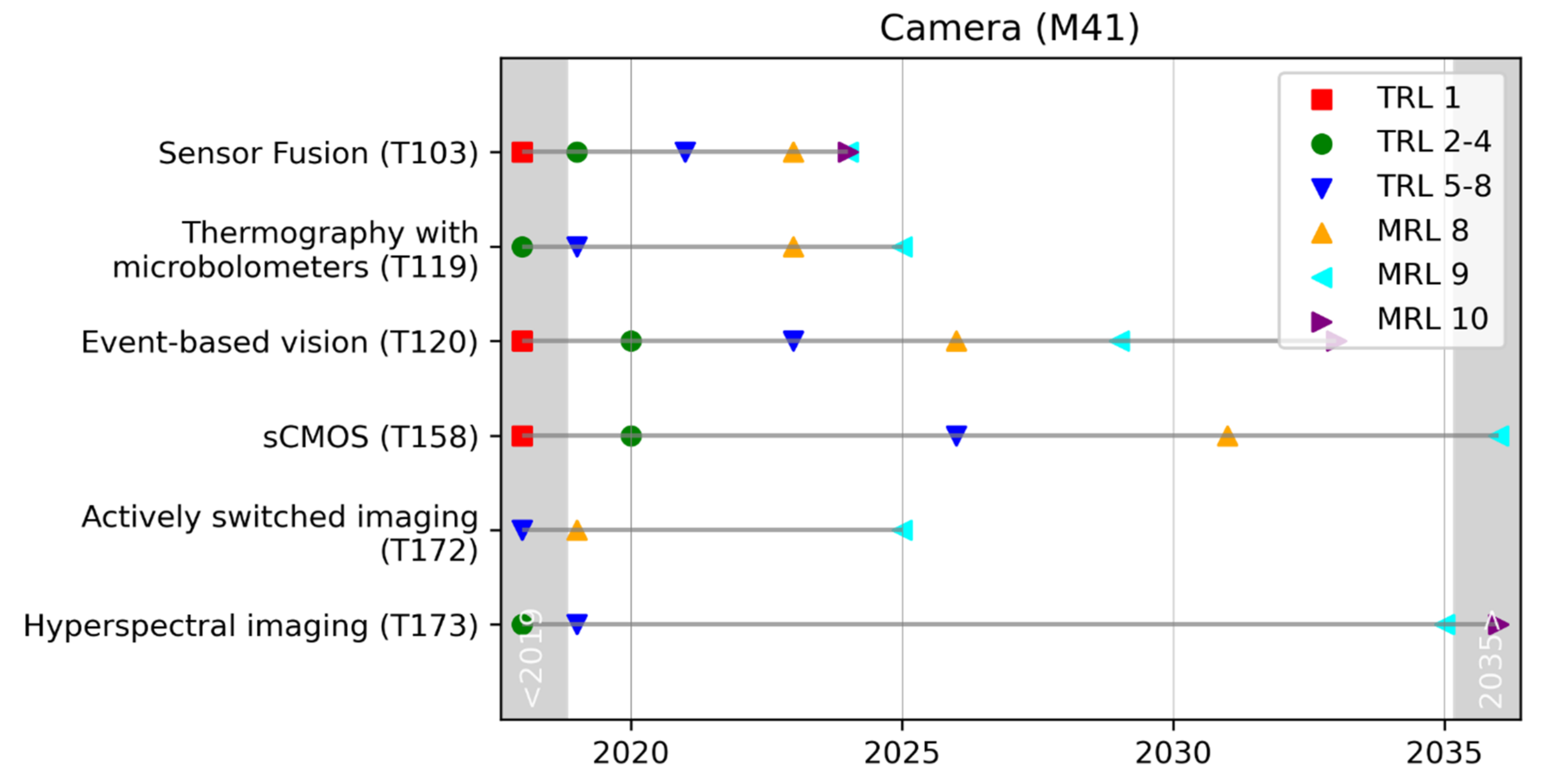
- A temporal indication of the development of the technologies should be provided, ideally based on their maturity levels.
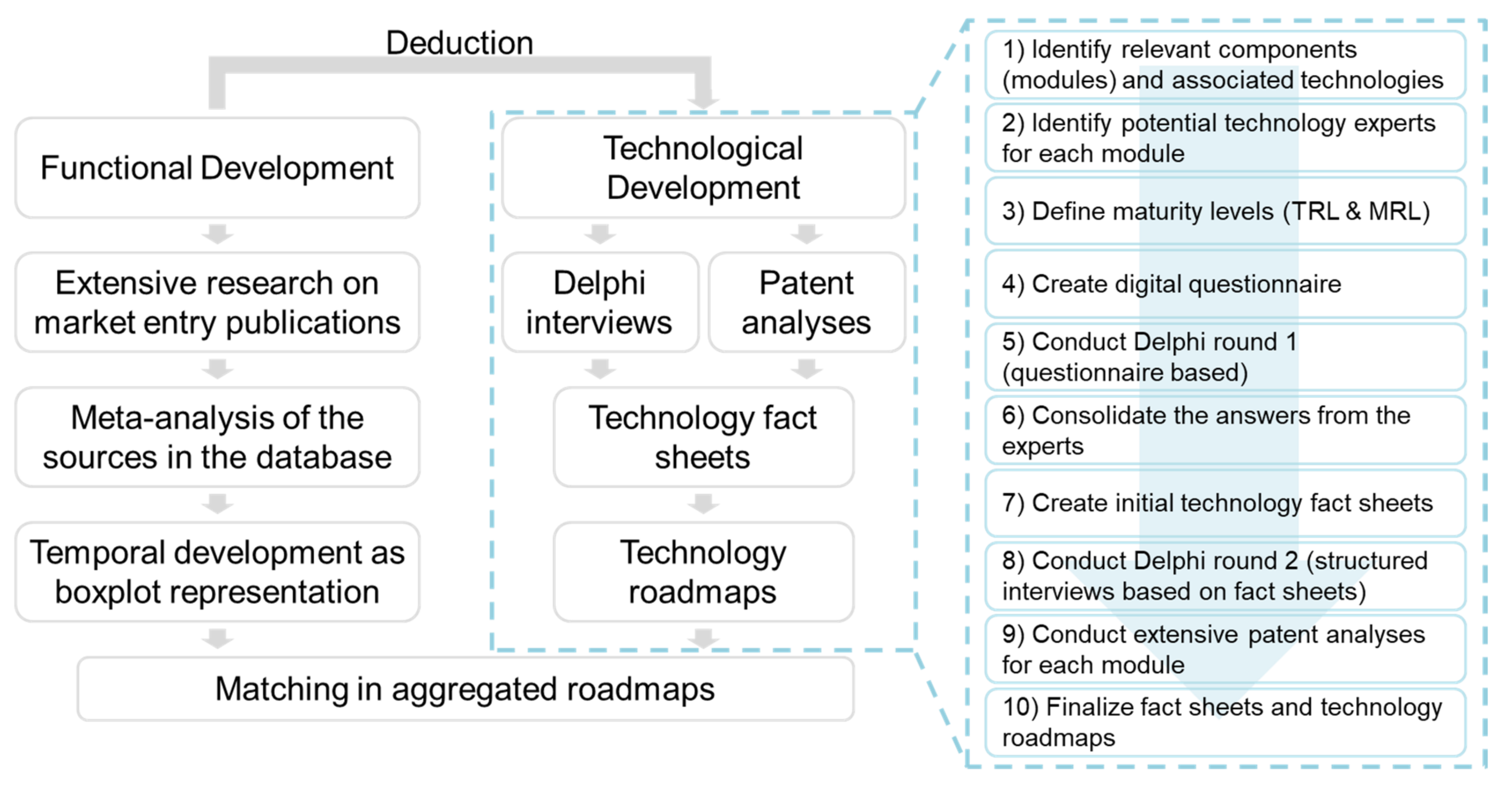
2. Methodology
2.1. Publication Analysis for Functional Development
2.2. Delphi Survey and Patent Analyses for Technological Development
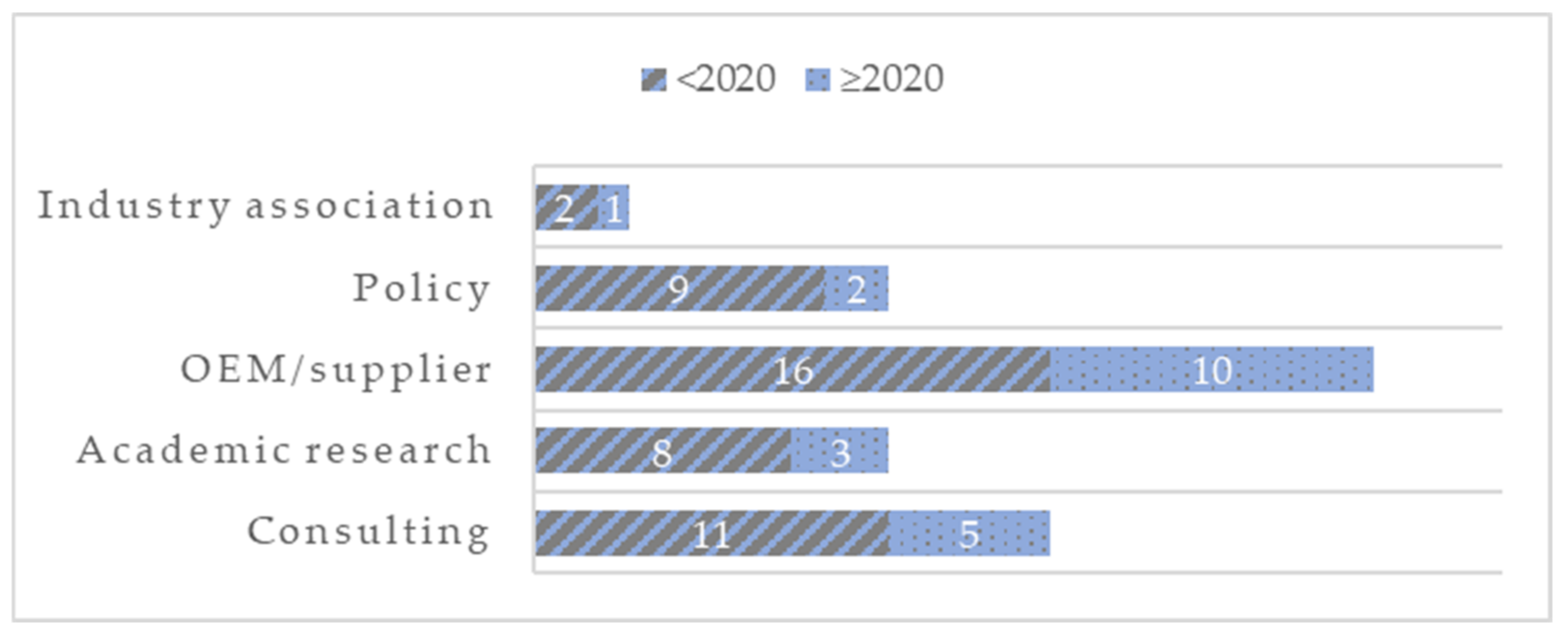
2.2.1. Identification of Relevant Modules
2.2.2. Practice-Oriented Classification of Maturity Levels
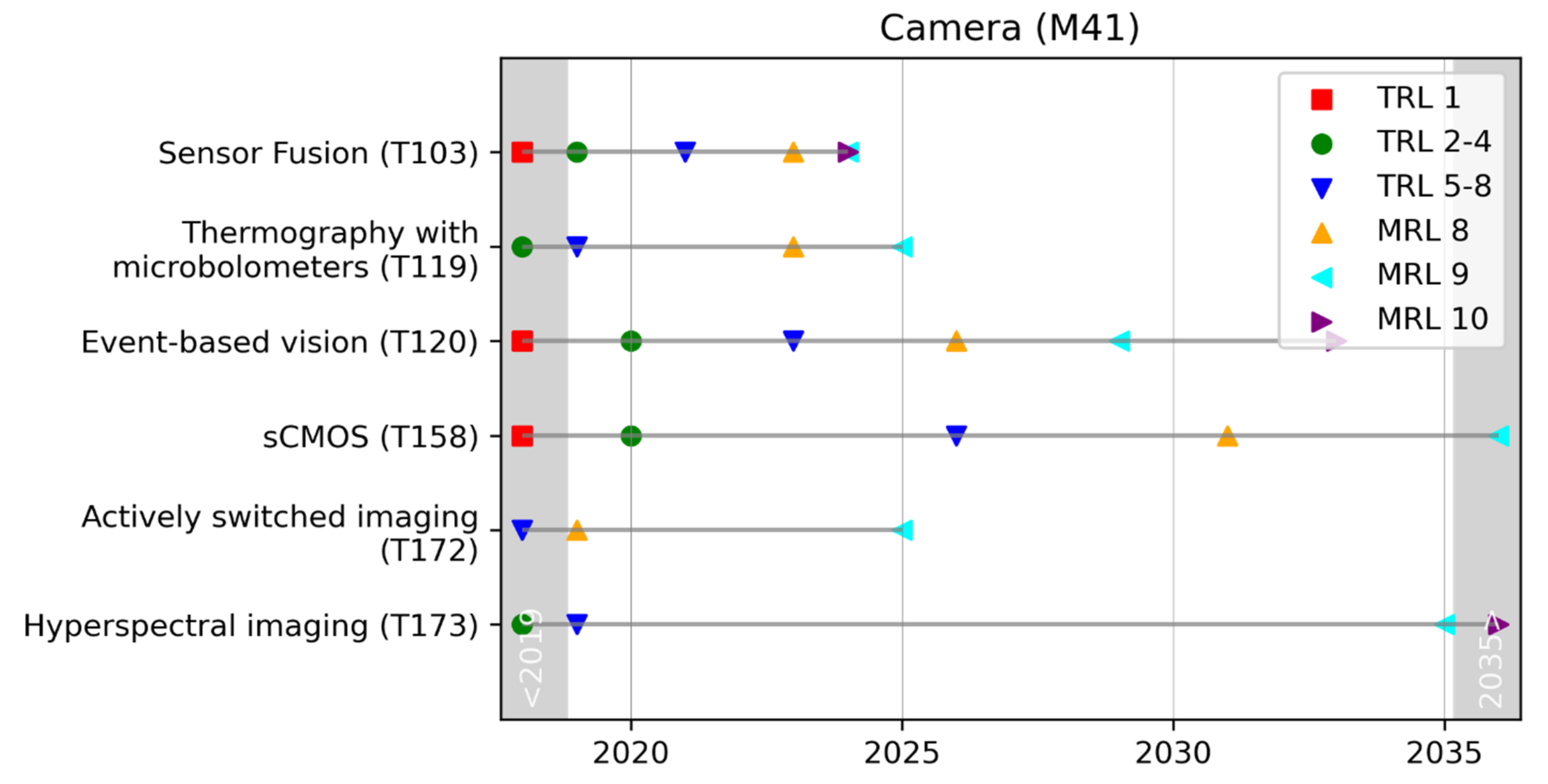
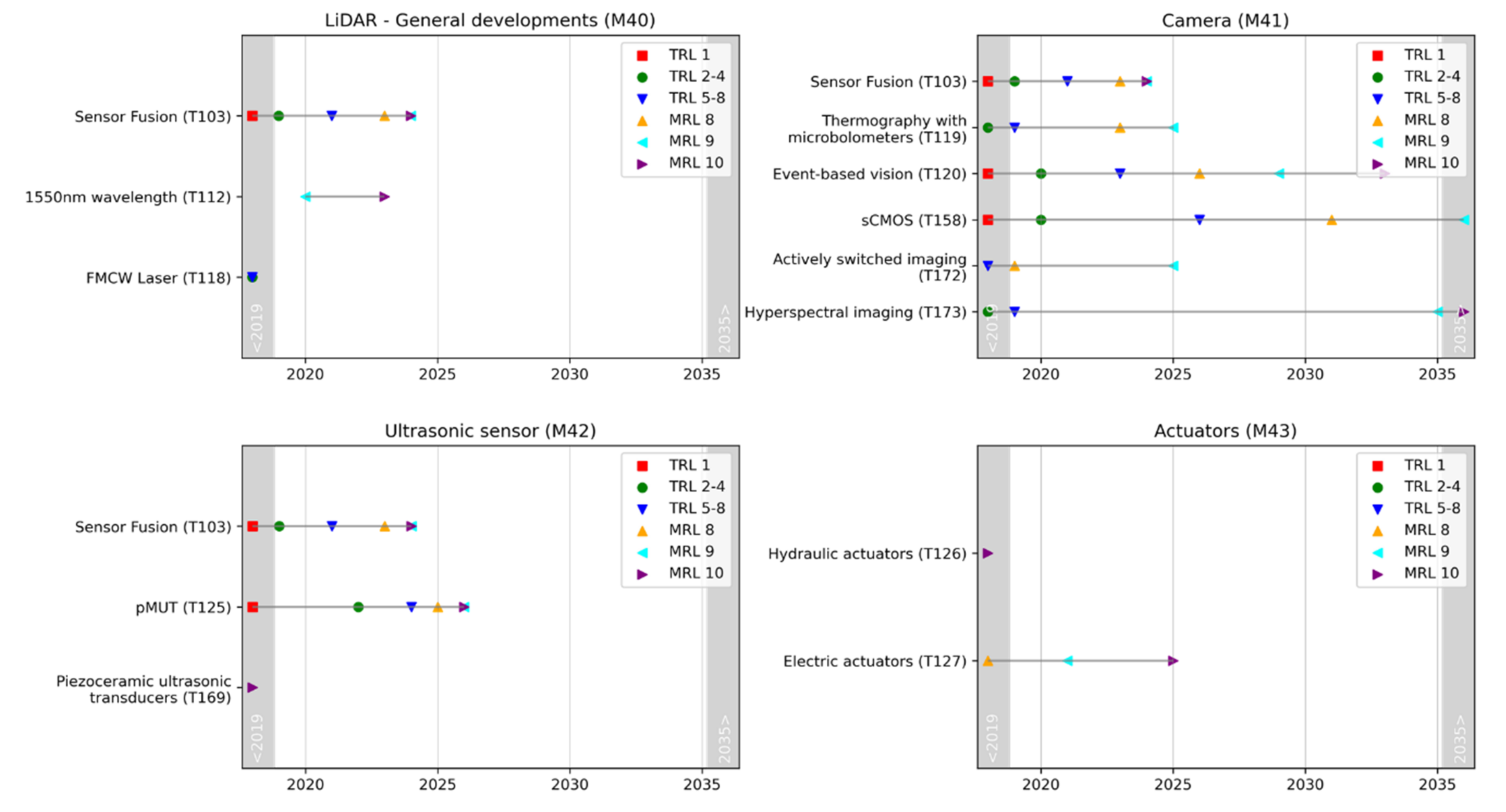
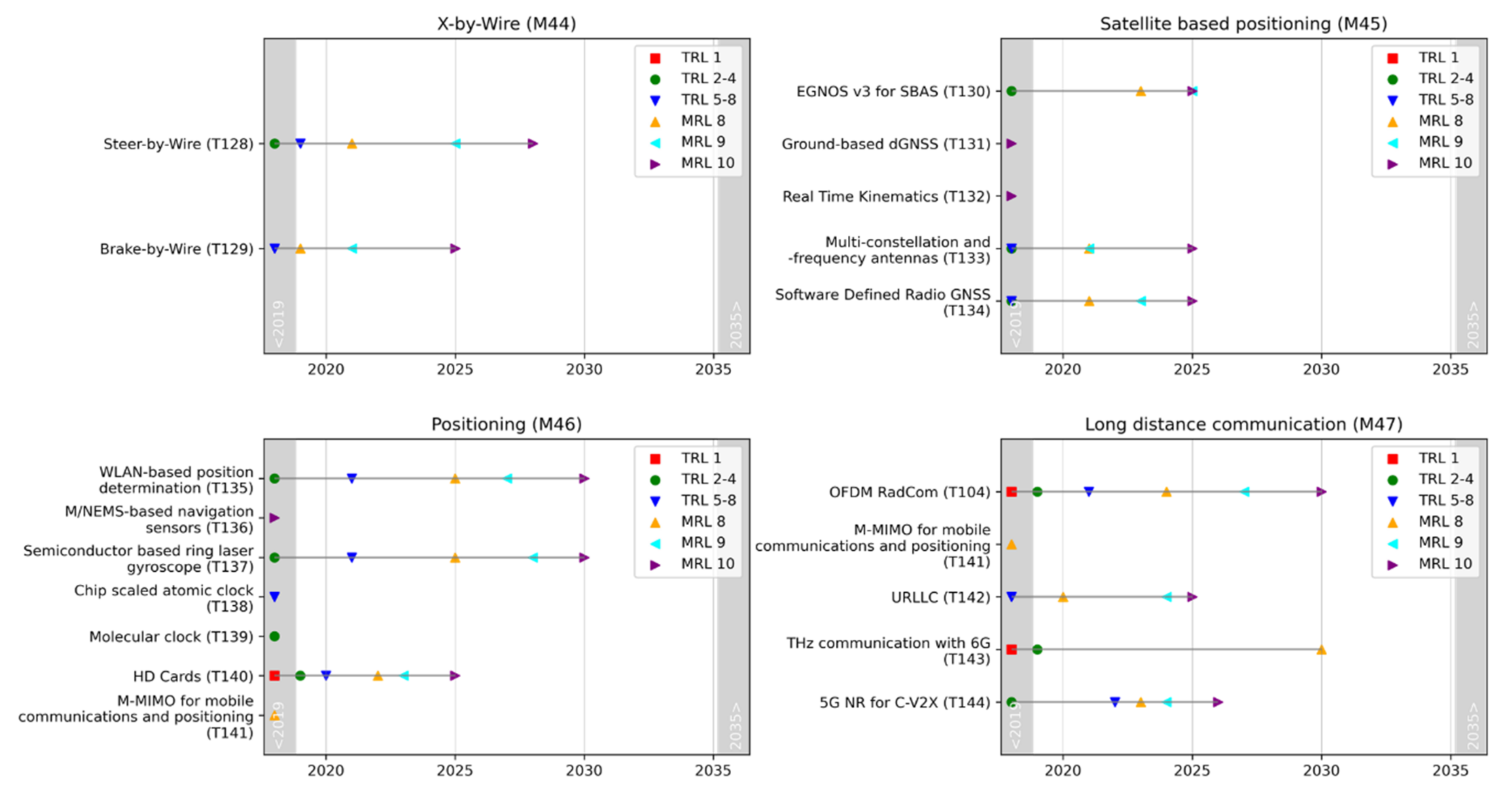
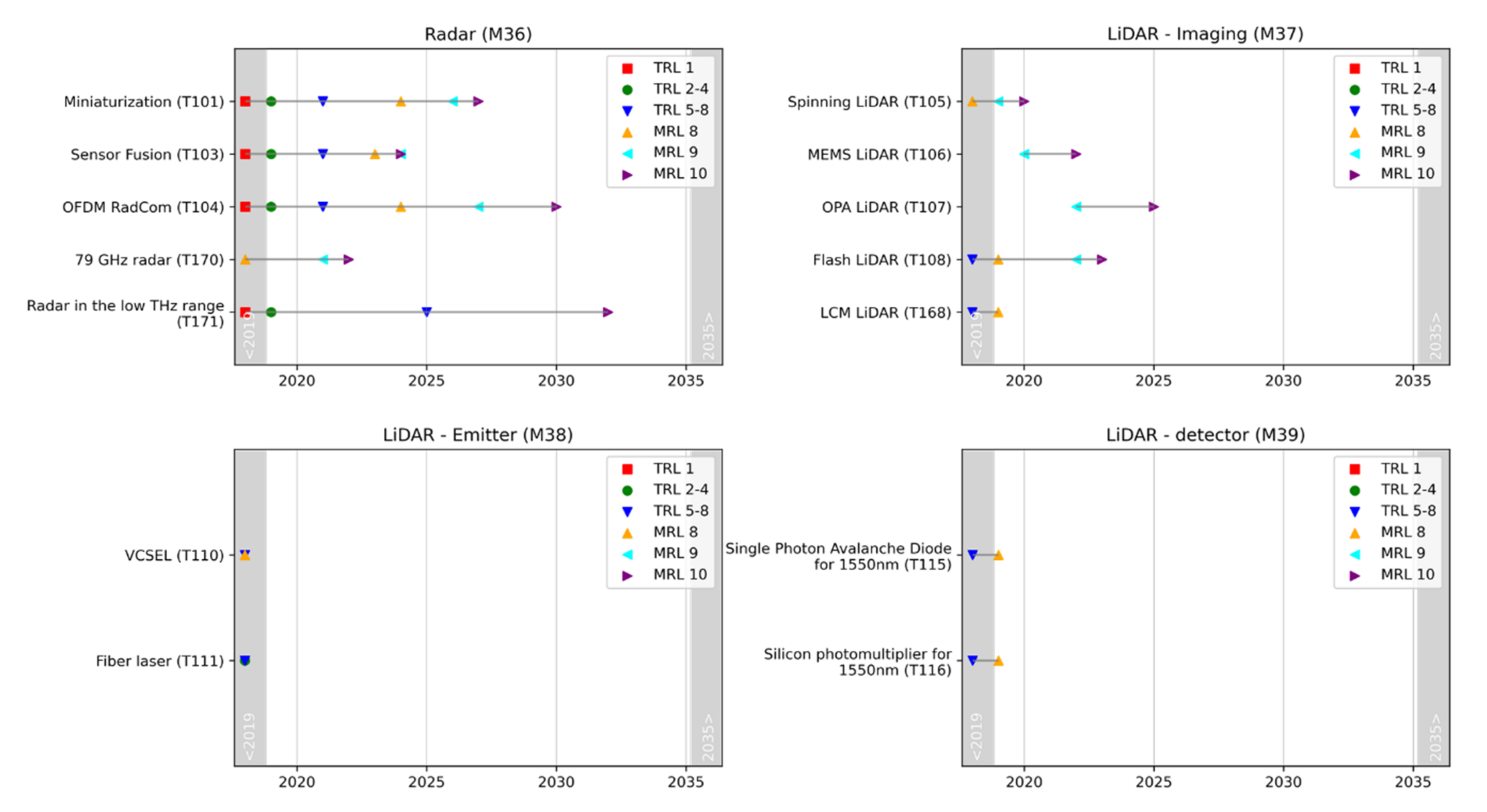
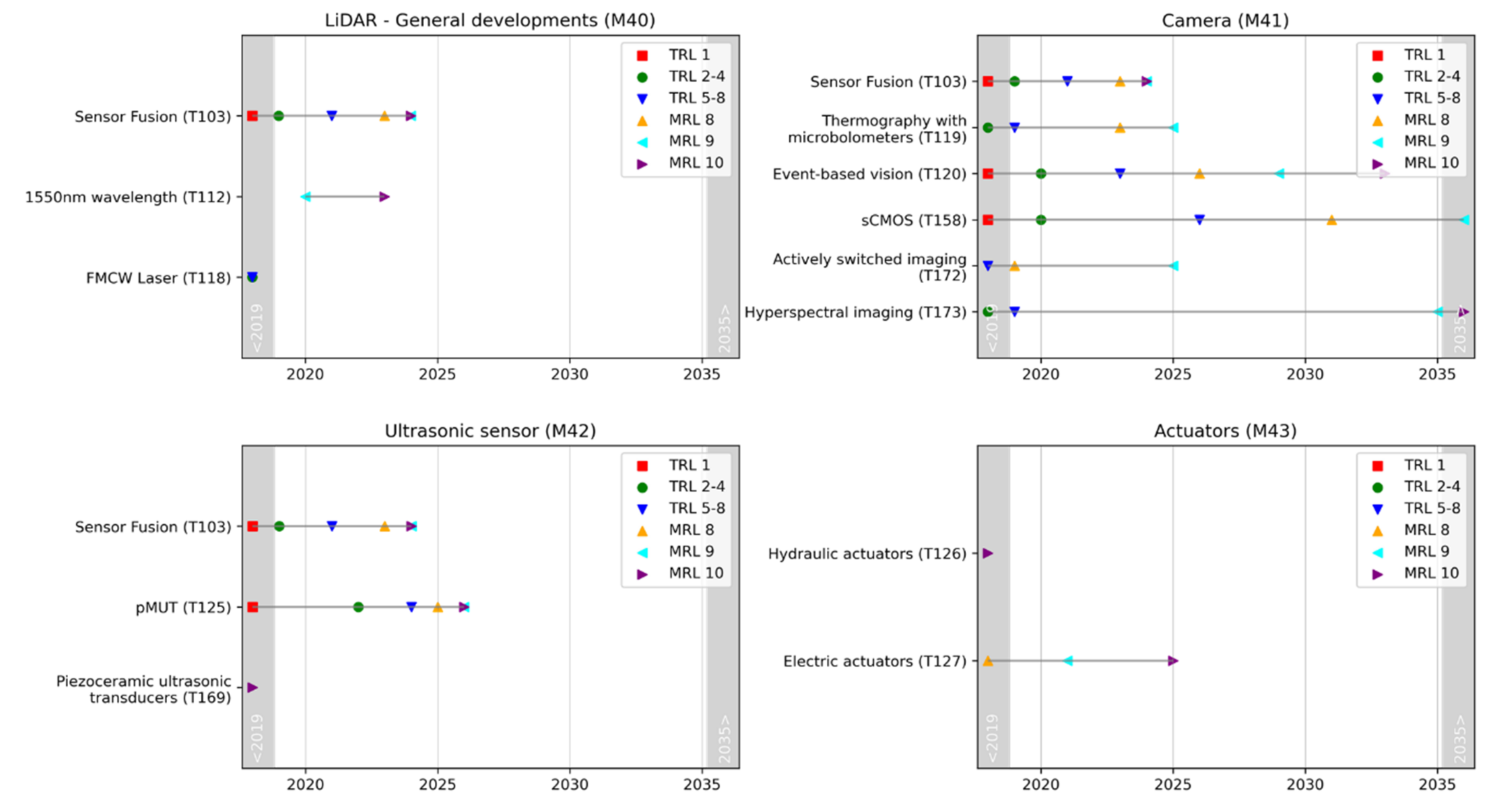
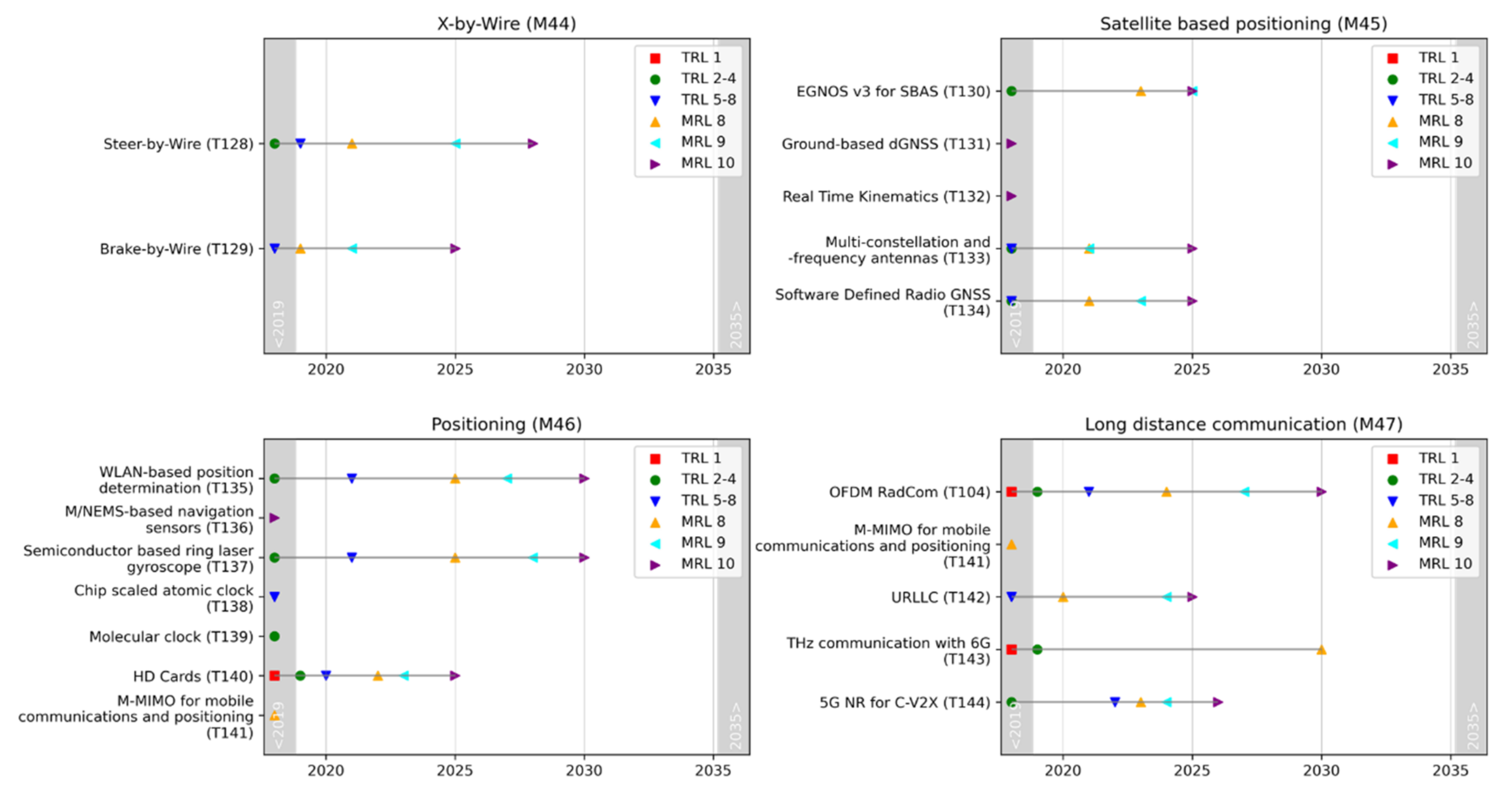
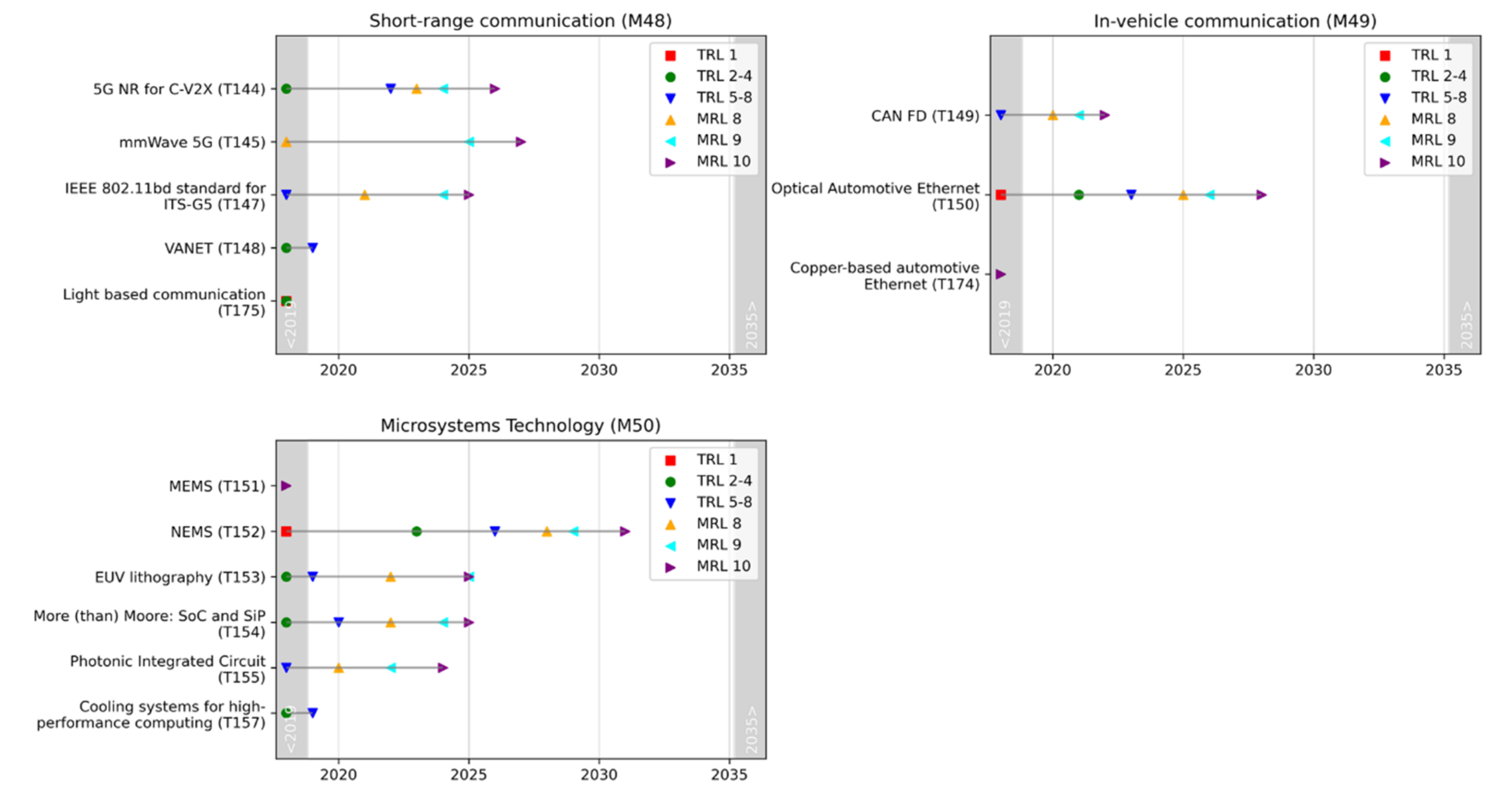
2.2.3. Structured Presentation in Technology Roadmaps
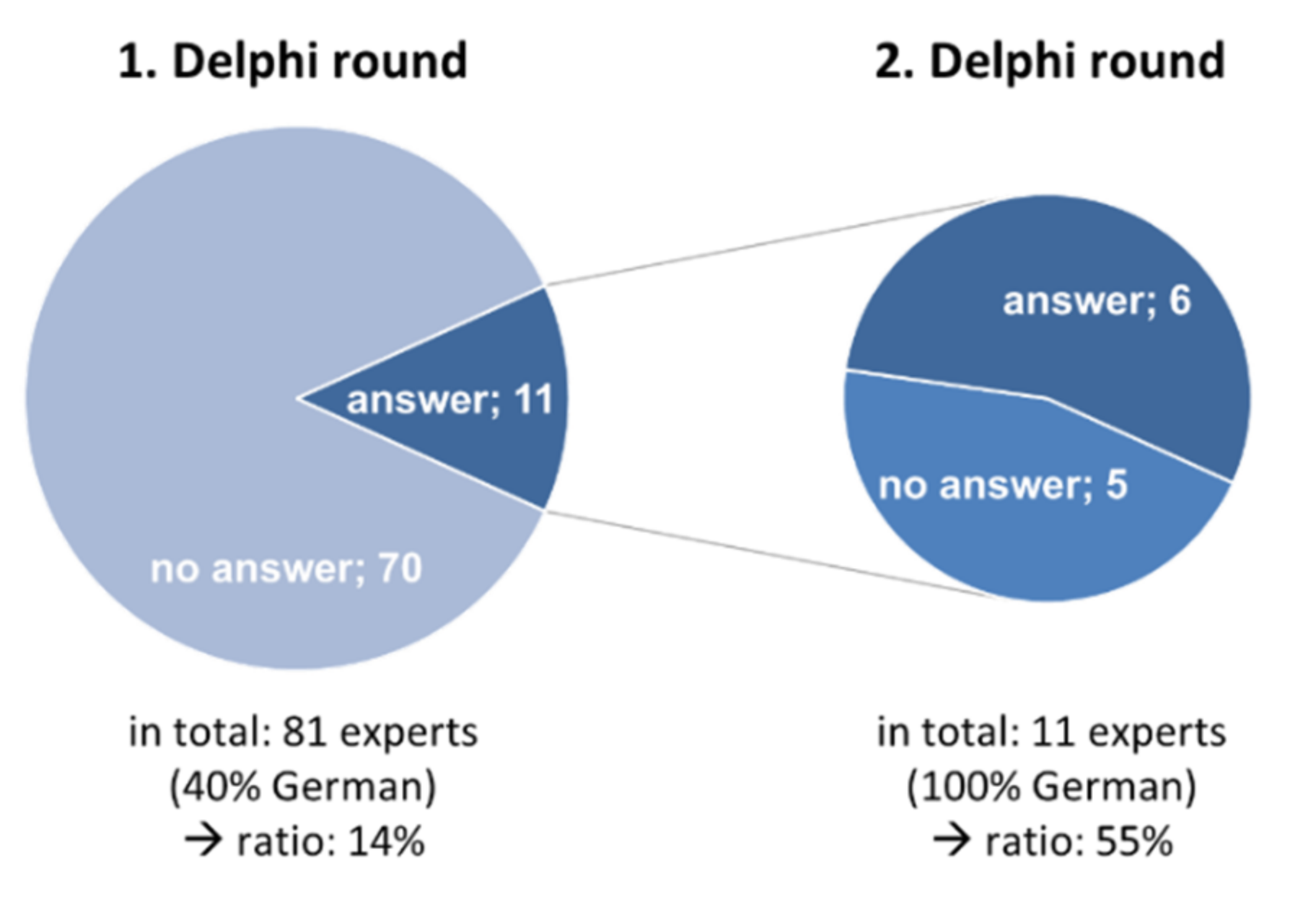
2.2.4. Delphi Survey
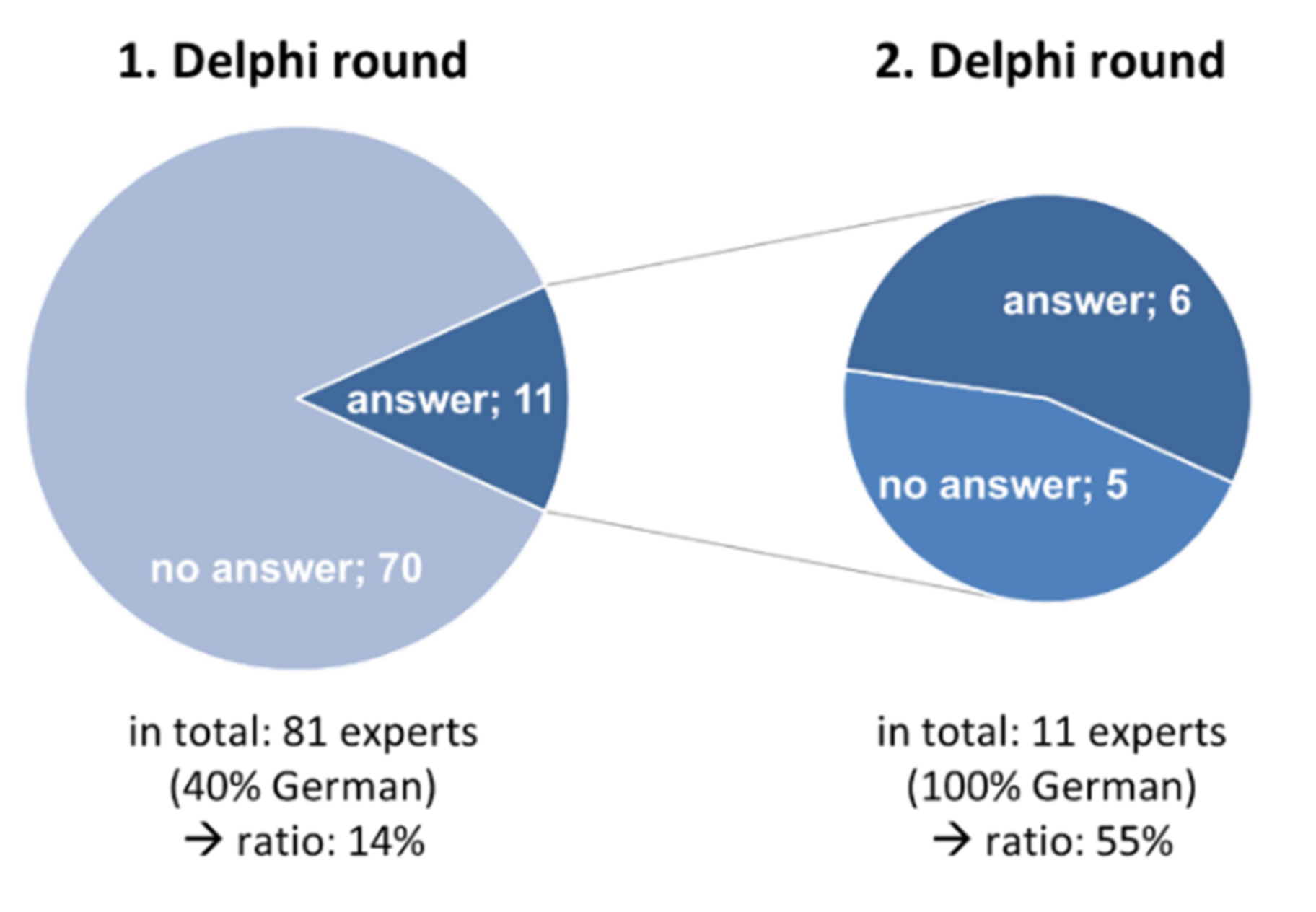
- Identification of experts in a Delphi panel (the initial base must be large enough so that, despite the expected shrinkage in each round, there are enough experts left in the last Delphi round);
- Survey of the panel with a structured questionnaire;
- Anonymity of the responses as well as of the experts;
- Consolidation of the answers after each round of questioning, including reasons for drastic discrepancies;
- (Multiple) repetition (min. two rounds) of the survey.
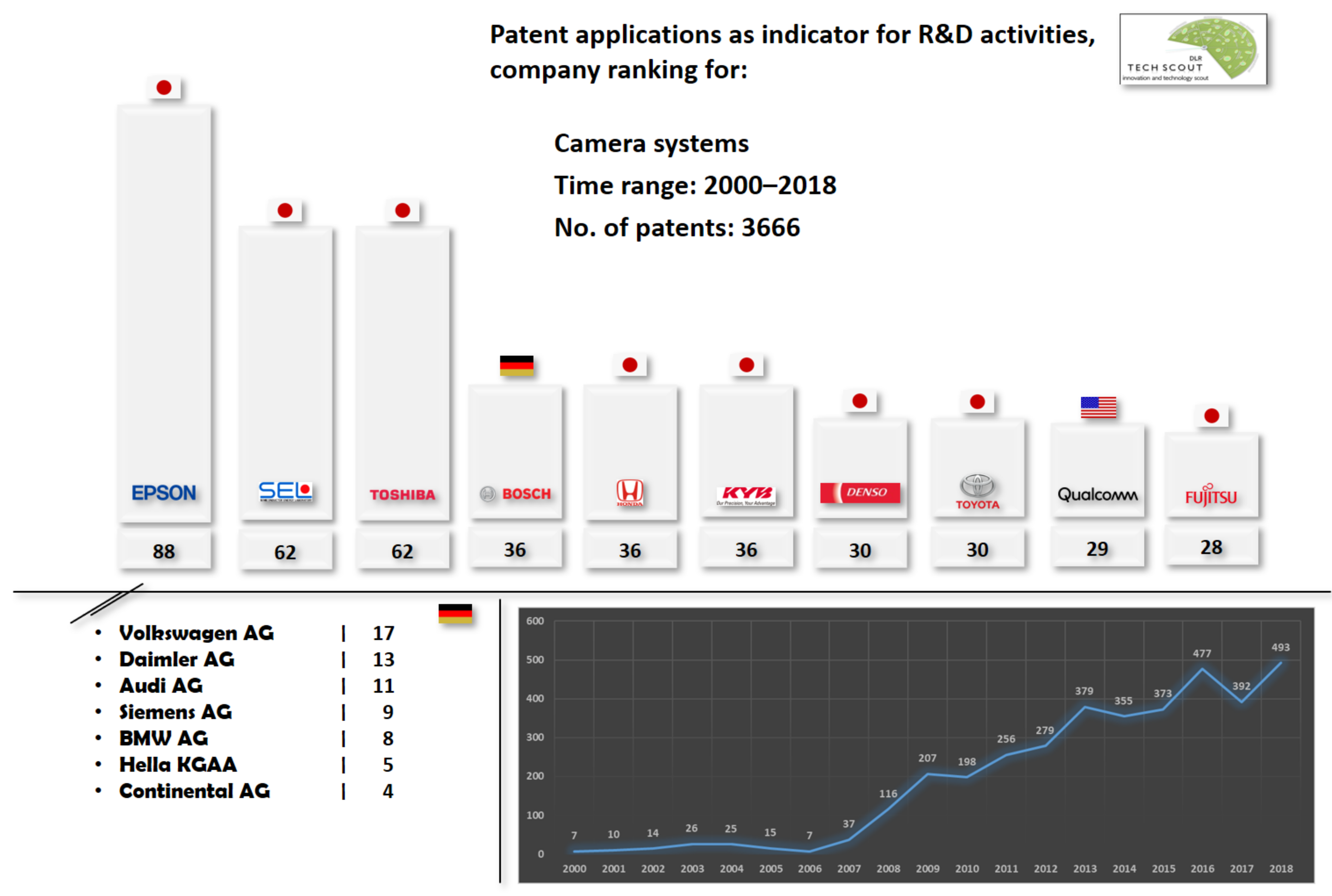
2.2.5. Patent Analysis
3. Results
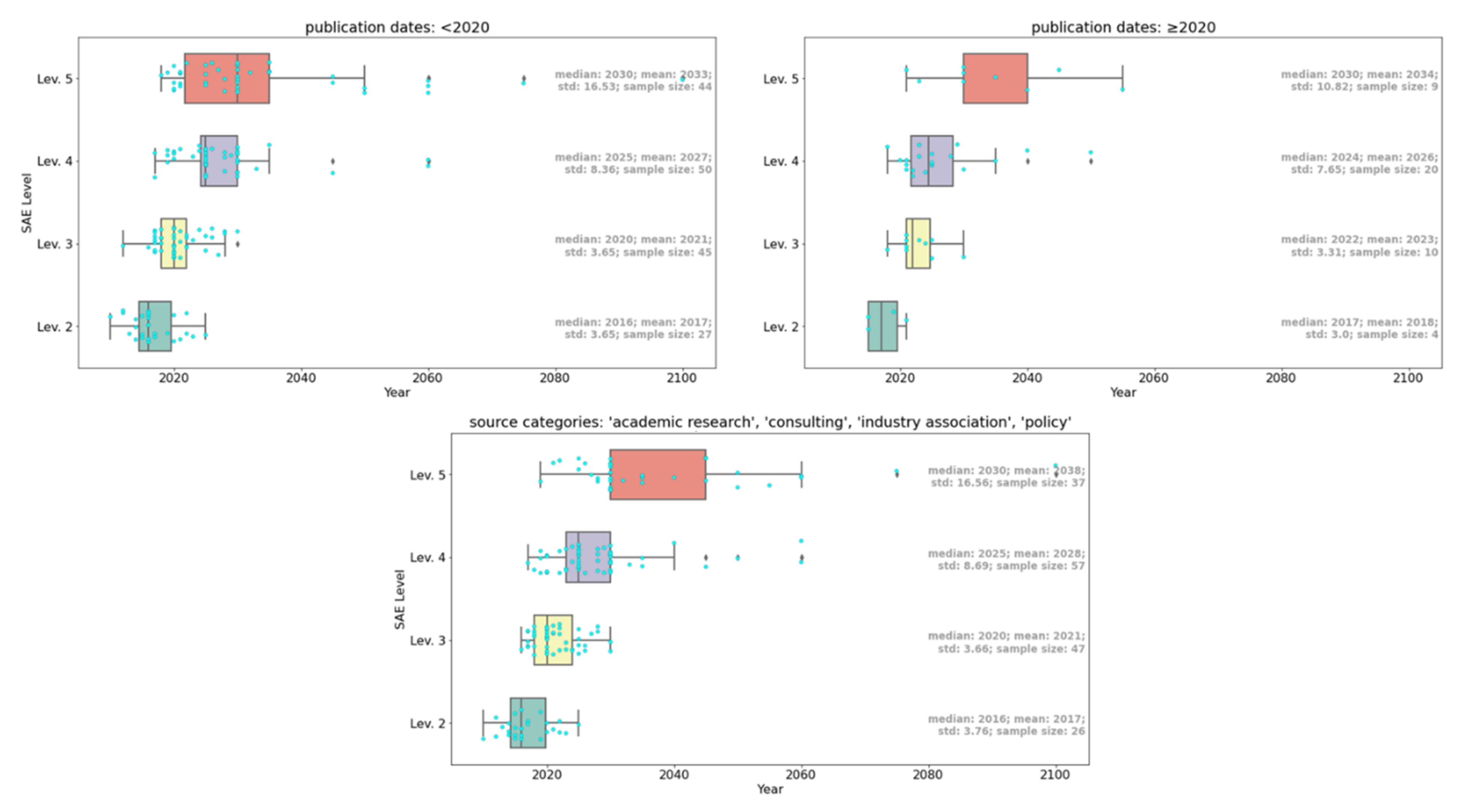
3.1. Trends in Functional Development
3.2. Trends in Technological Development
3.2.1. Roadmaps Based on Delphi Survey
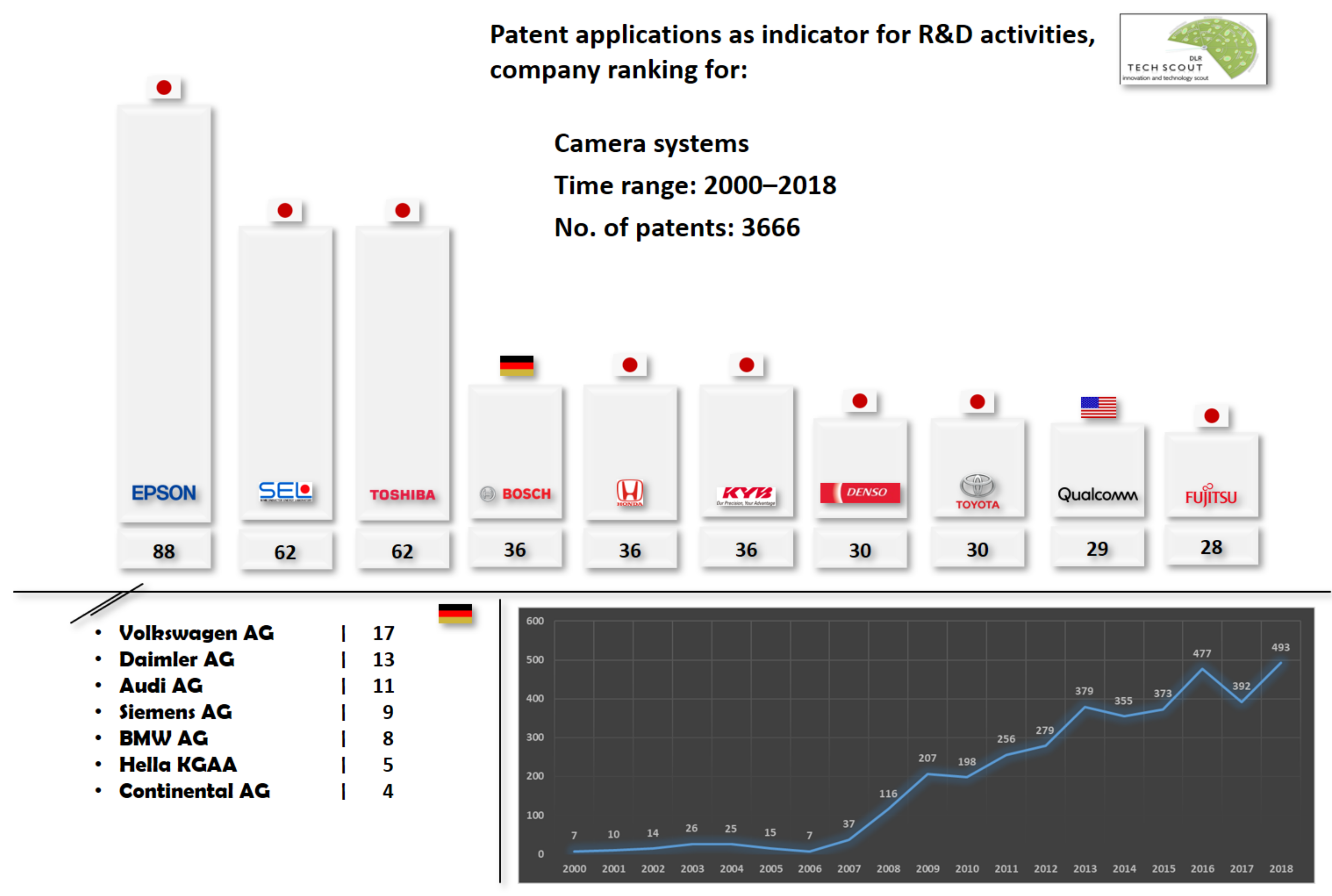
3.2.2. Patent Analyses
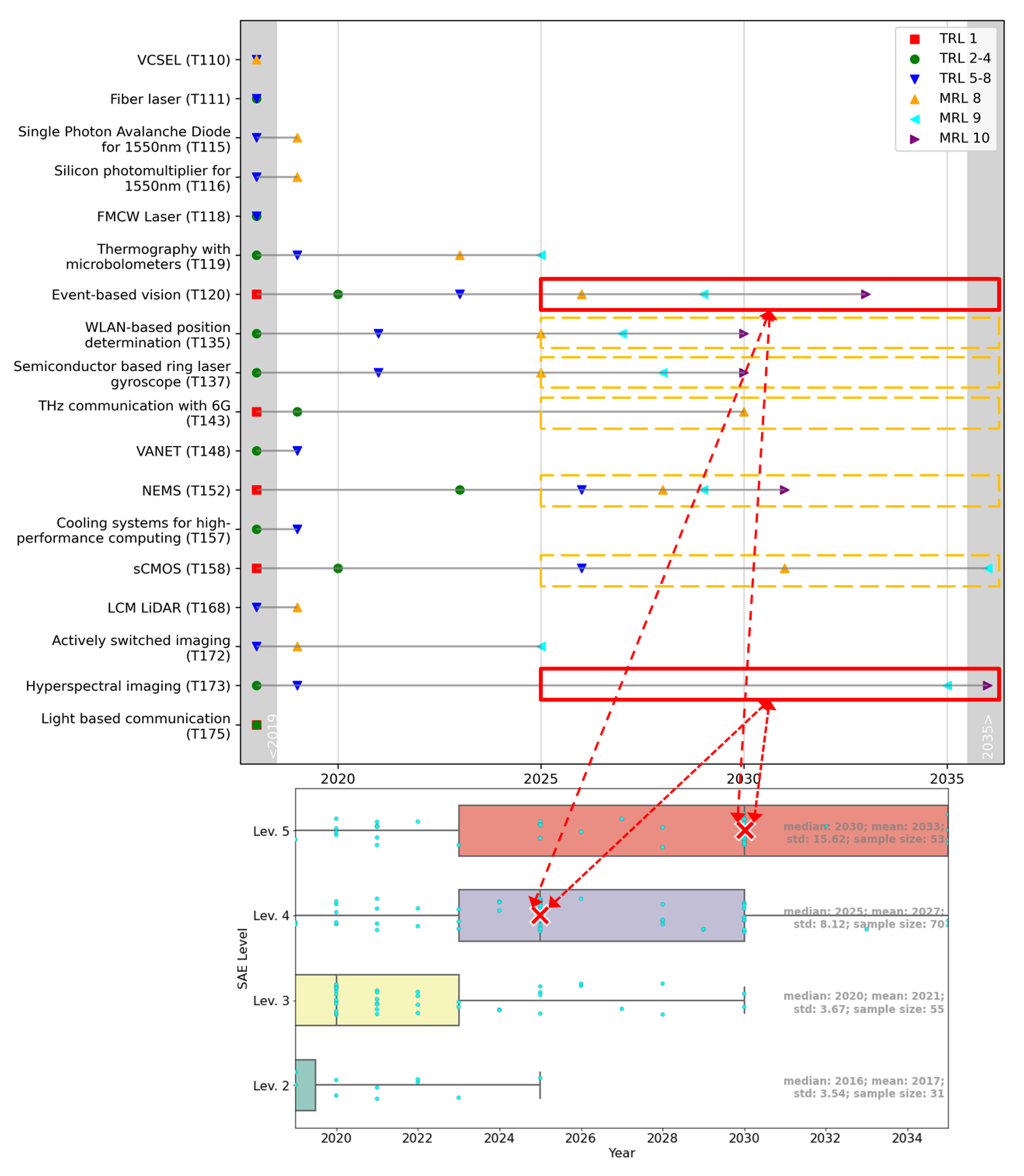
3.3. Aggregation of Functional and Technological Roadmaps
4. Discussion
- (1)
- While other works combine different technology forecasting methods for pre- or post-processing [11,19], the approach described in this paper utilizes two different approaches for a functional assessment on the one side and a technological evaluation on the other side. Contrasting the respective findings validates or disproves them. In any case, it creates a sophisticated basis for deep-dive discussions among technology and business experts.
- (2)
- The authors of [42] demand an easy-to-use and low-effort technology forecasting methodology for SMEs. The methodology proposed in our study does not require complex computing efforts. However, it can still be varied in its complexity: for example, the more experts that are included in the Delphi expert panel, the more time is needed to conduct the survey, thereby improving the reliability of results.
- (3)
- This method starts from the perspective of functional development and, subsequently, derives technologies that are required for achieving these functions. Thus, a broad range of relevant technologies is evaluated, rather than individual, isolated technologies.
- (4)
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Category |
|---|---|
| [61] | OEM/supplier |
| [62] | OEM/supplier |
| [63] | Academic research |
| [64] | OEM/supplier |
| [65] | Consulting |
| [66] | Consulting |
| [67] | Policy |
| [68] | Policy |
| [69] | OEM/supplier |
| [70] | Academic research |
| [71] | Academic research |
| [72] | Academic research |
| [73] | OEM/supplier |
| [74] | Consulting |
| [75] | OEM/supplier |
| [76] | Industry association |
| [77] | Policy |
| [78] | Policy |
| [79] | Policy |
| [80] | Policy |
| [81] | Policy |
| [82] | Policy |
| [83] | Academic research |
| [84] | Academic research |
| [85] | OEM/supplier |
| [86] | OEM/supplier |
| [87] | OEM/supplier |
| [88] | OEM/supplier |
| [89] | Consulting |
| [90] | Consulting |
| [91] | Academic research |
| [92] | Policy |
| [93] | Consulting |
| [94] | Consulting |
| [95] | Academic research |
| [96] | Academic research |
| [97] | Consulting |
| [98] | Consulting |
| [99] | Consulting |
| [100] | Academic research |
| [101] | Consulting |
| [102] | Policy |
| [103] | Consulting |
| [104] | Consulting |
| [105] | Consulting |
| [106] | Consulting |
| [107] | Policy |
| [108] | OEM/supplier |
| [109] | Industry association |
| [110] | Industry association |
| [111] | OEM/supplier |
| [112] | OEM/supplier |
| [113] | Consulting |
| [114] | OEM/supplier |
| [115] | OEM/supplier |
References
- Laube, T. Methodik des Interorganisationalen Technologietransfers: Ein Technologie-Roadmap-Basiertes Verfahren für Kleine und Mittlere Technologieorientierte Unternehmen; University of Stuttgart: Stuttgart, Germany, 2009. [Google Scholar]
- Wildemann, H. Wissensmanagement und Unternehmenserfolg: Erfolgspotentiale, Einführungsstrategien und Organisation des Wissensmanagements. In Wissensmanagement in Produktion und Umweltschutz; Haasis, H.-D., Kriwald, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2001; pp. 21–44. ISBN 978-3-642-63171-9. [Google Scholar]
- Woisetschläger, D.M. Consumer Perceptions of Automated Driving Technologies: An Examination of Use Cases and Branding Strategies. In Autonomous Driving; Maurer, M., Gerdes, J.C., Lenz, B., Winner, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 687–706. ISBN 978-3-662-48847-8. [Google Scholar]
- Meyer, G.; Deix, S. Research and Innovation for Automated Driving in Germany and Europe. In Road Vehicle Automation: Based on an Expert Workshop Organized by the Transportation Research Board; Meyer, G., Beiker, S., Eds.; Springer: Cham, Switzerland, 2014; pp. 71–81. ISBN 978-3-319-05989-1. [Google Scholar]
- Gordon, T.J.; Lidberg, M. Automated driving and autonomous functions on road vehicles. Veh. Syst. Dyn. 2015, 53, 958–994. [Google Scholar] [CrossRef] [Green Version]
- Calleja-Sanz, G.; Olivella-Nadal, J.; Solé-Parellada, F. Technology Forecasting: Recent Trends and New Methods. In Research Methodology in Management and Industrial Engineering; Machado, C., Davim, J.P., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 45–69. ISBN 978-3-030-40895-4. [Google Scholar]
- Roper, A.T.; Cunningham, S.W.; Porter, A.L.; Mason, T.W.; Rossini, F.A.; Banks, J. Forecasting and Management of Technology, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011; ISBN 9780470440902. [Google Scholar]
- Firat, A.K.; Woon, W.L.; Madnick, S. Technological Forecasting—A Review; Composite Information Systems Laboratory (CISL), Massachusetts Institute of Technology (MIT): Cambridge, MA, USA, 2008; (CISL# 2008-15); Available online: http://web.mit.edu/smadnick/www/wp/2008-15.pdf (accessed on 28 March 2022).
- Ji, Y.; Zhu, X.; Zhao, T.; Wu, L.; Sun, M. Revealing Technology Innovation, Competition and Cooperation of Self-Driving Vehicles from Patent Perspective. IEEE Access 2020, 8, 221191–221202. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, Y.; Ma, X.; Zhang, Y. Forecasting the Development of Self-Driving Technology in China by Multidimensional Information. J. Adv. Transp. 2021, 2021, 1693459. [Google Scholar] [CrossRef]
- Gao, L.; Porter, A.L.; Wang, J.; Fang, S.; Zhang, X.; Ma, T.; Wang, W.; Huang, L. Technology life cycle analysis method based on patent documents. Technol. Forecast. Soc. Chang. 2013, 80, 398–407. [Google Scholar] [CrossRef]
- Jung, S.; Kandadi, R.R.; Datta, R.; Benton, R.; Segev, A. Identification of Technology-Relevant Entities Based on Trend Curves. In Proceedings of the 9th International Conference on Information Technology Convergence and Services (ITCSE 2020), Vancouver, BC, Canada, 30–31 May 2020; AIRCC Publishing Corporation: Vancouver, BC, Canada, 2020; pp. 1–13. [Google Scholar]
- Wang, L.; Jiang, S.; Zhang, S. Mapping technological trajectories and exploring knowledge sources: A case study of 3D printing technologies. Technol. Forecast. Soc. Chang. 2020, 161, 120251. [Google Scholar] [CrossRef]
- Zhou, Y.; Dong, F.; Liu, Y.; Li, Z.; Du, J.; Zhang, L. Forecasting emerging technologies using data augmentation and deep learning. Scientometrics 2020, 123, 1–29. [Google Scholar] [CrossRef] [Green Version]
- Daim, T.; Lai, K.K.; Yalcin, H.; Alsoubie, F.; Kumar, V. Forecasting technological positioning through technology knowledge redundancy: Patent citation analysis of IoT, cybersecurity, and Blockchain. Technol. Forecast. Soc. Chang. 2020, 161, 120329. [Google Scholar] [CrossRef]
- Daim, T.U.; Rueda, G.; Martin, H.; Gerdsri, P. Forecasting emerging technologies: Use of bibliometrics and patent analysis. Technol. Forecast. Soc. Chang. 2006, 73, 981–1012. [Google Scholar] [CrossRef]
- Ranaei, S.; Karvonen, M.; Suominen, A.; Kässi, T. Patent-based technology forecasting: Case of electric and hydrogen vehicle. Int. J. Energy Technol. Policy 2016, 12, 20–40. [Google Scholar] [CrossRef]
- Kayser, V. Extending the Knowledge Base of Foresight: The Contribution of Text Mining. Master’s Thesis, Technische Universität Berlin, Berlin, Germany, 2016. [Google Scholar]
- Li, S.; Garces, E.; Daim, T. Technology forecasting by analogy-based on social network analysis: The case of autonomous vehicles. Technol. Forecast. Soc. Chang. 2019, 148, 119731. [Google Scholar] [CrossRef]
- Csizmazia, R.A. Identifying Automotive Industry Trends: Data Mining from Intellectual Property Databases. J. Bus. Manag. Stud. 2021, 3, 120–124. [Google Scholar] [CrossRef]
- Jun, S.-P.; Sung, T.-E.; Park, H.-W. Forecasting by analogy using the web search traffic. Technol. Forecast. Soc. Chang. 2017, 115, 37–51. [Google Scholar] [CrossRef] [Green Version]
- Rowe, G.; Wright, G. The Delphi technique as a forecasting tool: Issues and analysis. Int. J. Forecast. 1999, 15, 353–375. [Google Scholar] [CrossRef]
- Merfeld, K.; Wilhelms, M.-P.; Henkel, S.; Kreutzer, K. Carsharing with shared autonomous vehicles: Uncovering drivers, barriers and future developments—A four-stage Delphi study. Technol. Forecast. Soc. Chang. 2019, 144, 66–81. [Google Scholar] [CrossRef]
- Förster, B. Technology foresight for sustainable production in the German automotive supplier industry. Technol. Forecast. Soc. Chang. 2015, 92, 237–248. [Google Scholar] [CrossRef]
- Park, S.Y.; Kim, J.W.; Lee, D.H. Development of a market penetration forecasting model for Hydrogen Fuel Cell Vehicles considering infrastructure and cost reduction effects. Energy Policy 2011, 39, 3307–3315. [Google Scholar] [CrossRef]
- Propfe, B.; Kreyenberg, D.; Wind, J.; Schmid, S. Market penetration analysis of electric vehicles in the German passenger car market towards 2030. Int. J. Hydrogen Energy 2013, 38, 5201–5208. [Google Scholar] [CrossRef]
- Ehrenberger, S.; Seum, S.; Pregger, T.; Simon, S.; Knitschky, G.; Kugler, U. Land transport development in three integrated scenarios for Germany—Technology options, energy demand and emissions. Transp. Res. Part D Transp. Environ. 2021, 90, 102669. [Google Scholar] [CrossRef]
- Lavasani, M.; Jin, X.; Du, Y. Market Penetration Model for Autonomous Vehicles on the Basis of Earlier Technology Adoption Experience. Transp. Res. Rec. 2016, 2597, 67–74. [Google Scholar] [CrossRef]
- Yole Développement. The Automotive LiDAR Market. 2018. Available online: http://www.woodsidecap.com/wp-content/uploads/2018/04/Yole_WCP-LiDAR-Report_April-2018-FINAL.pdf (accessed on 19 March 2022).
- Milakis, D.; Snelder, M.; van Arem, B.; van Wee, B.; Correia, H.d.A.G. Development and transport implications of automated vehicles in The Netherlands: Scenarios for 2030 and 2050. Eur. J. Transp. Infrastruct. Res. 2017, 17, 63–98. [Google Scholar] [CrossRef]
- Halicka, K. Main Concepts of Technology Analysis in the Light of the Literature on the Subject. Procedia Eng. 2017, 182, 291–298. [Google Scholar] [CrossRef]
- Technologie-Roadmapping; Möhrle, M.G.; Isenmann, R. (Eds.) Springer: Berlin/Heidelberg, Germany, 2017; ISBN 978-3-662-52709-2. [Google Scholar]
- Abele, T. Verfahren für das Technologie-Roadmapping zur Unterstützung des Strategischen Technologiemanagements; Jost-Jetter: Heimsheim, Germany, 2006; ISBN 978-3-936947-94-6. [Google Scholar]
- Huang, L.; Zhang, Y.; Guo, Y.; Zhu, D.; Porter, A.L. Four dimensional Science and Technology planning: A new approach based on bibliometrics and technology roadmapping. Technol. Forecast. Soc. Chang. 2014, 81, 39–48. [Google Scholar] [CrossRef]
- Martin, H.; Daim, T.U. Technology roadmap development process (TRDP) for the service sector: A conceptual framework. Technol. Soc. 2012, 34, 94–105. [Google Scholar] [CrossRef]
- Phaal, R.; Farrukh, C.J.; Probert, D.R. Technology roadmapping—A planning framework for evolution and revolution. Technol. Forecast. Soc. Chang. 2004, 71, 5–26. [Google Scholar] [CrossRef]
- Gandomi, A.; Haider, M. Beyond the hype: Big data concepts, methods, and analytics. Int. J. Inf. Manag. 2015, 35, 137–144. [Google Scholar] [CrossRef] [Green Version]
- Thai, M.T.; Wu, W.; Xiong, H. Big Data in Complex and Social Networks; CRC Press: New York, NY, USA, 2017; ISBN 9781315396699. [Google Scholar]
- Michard, F.; Teboul, J.L. Predictive analytics: Beyond the buzz. Ann. Intensive Care 2019, 9, 46. [Google Scholar] [CrossRef]
- Sivarajah, U.; Kamal, M.M.; Irani, Z.; Weerakkody, V. Critical analysis of Big Data challenges and analytical methods. J. Bus. Res. 2017, 70, 263–286. [Google Scholar] [CrossRef] [Green Version]
- Najafabadi, M.M.; Villanustre, F.; Khoshgoftaar, T.M.; Seliya, N.; Wald, R.; Muharemagic, E. Deep learning applications and challenges in big data analytics. J. Big Data 2015, 2, 1. [Google Scholar] [CrossRef] [Green Version]
- Coates, V.; Farooque, M.; Klavans, R.; Lapid, K.; Linstone, H.A.; Pistorius, C.; Porter, A.L. On the Future of Technological Forecasting. Technol. Forecast. Soc. Chang. 2001, 67, 1–17. [Google Scholar] [CrossRef]
- NASA. Technology Readiness Level Definitions. 2010. Available online: https://www.nasa.gov/pdf/458490main_TRL_Definitions.pdf (accessed on 23 December 2020).
- Williamson, R.; Beasley, J. Automotive Technology and Manufacturing Readiness Levels. 2011. Available online: https://www.smmt.co.uk/wp-content/uploads/sites/2/Automotive-Technology-and-Manufacturing-Readiness-Levels.pdf (accessed on 28 March 2022).
- Ulrich, C.; Frieske, B.; Bickel, P.; Marthaler, F.; Stieler, S.; Schmid, S.; Ott, S. Analysis and Presentation of the Development Status of Vehicle Technologies for Electrification and Automation by Creating a Technology Calendar. In Proceedings of the 21th Internationales Stuttgarter Symposium; Bargende, M., Reuss, H.-C., Wagner, A., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2021; pp. 321–332. ISBN 978-3-658-33465-9. [Google Scholar]
- Ammon, U. Delphi-Befragung. In Handbuch Methoden der Organisationsforschung; Kühl, S., Strodtholz, P., Taffertshofer, A., Eds.; VS Verlag für Sozialwissenschaften: Wiesbaden, Germany, 2009; pp. 458–476. ISBN 978-3-531-15827-3. [Google Scholar]
- VDI. VDI 3780: Technikbewertung Begriffe und Grundlagen; Verein Deutscher Ingenieure: Düsseldorf, Germany, 2000. [Google Scholar]
- Hasson, F.; Keeney, S.; McKenna, H. Research guidelines for the Delphi survey technique. J. Adv. Nurs. 2000, 32, 1008–1015. [Google Scholar] [CrossRef] [Green Version]
- Hsu, C.-C.; Sandford, B.A. Minimizing Non-Response in The Delphi Process: How to Respond to Non-Response. Pract. Assess. Res. Eval. 2007, 12, 17. [Google Scholar] [CrossRef]
- Waskom, M. seaborn: Statistical data visualization. J. Open Source Softw. 2021, 6, 3021. [Google Scholar] [CrossRef]
- Hunter, J.D. Matplotlib: A 2D Graphics Environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]
- McKinney, W. Data Structures for Statistical Computing in Python: Pandas. In Proceedings of the 9th Python in Science Conference, Austin, TX, USA, 28 June–3 July 2010; 2010; pp. 56–61. [Google Scholar]
- Ulrich, C.; Frieske, B.; Schmid, S.; Stieler, S.; Schwarz-Kocher, M.; Marthaler, F.; Ott, S.; Reinemann, J.; Bickel, P.; Schwarz, S.; et al. Technologiekalender Strukturwandel Automobil Baden-Württemberg (TKBW)—Technologiesteckbriefe. 2020. Available online: www.tkbw.de (accessed on 12 January 2021).
- Croucher, D. Camera Comparison: Prime 95B Scientific CMOS and EMCCD. 2017. Available online: https://www.photometrics.com/resources/technotes/pdfs/CameraComparison-Prime95B-sCMOS-and-EMCCD-TechNote.pdf (accessed on 24 August 2019).
- Wallace, J. Photonics Products: Scientific CMOS Cameras: sCMOS Cameras Reach New Levels of Capability. 2018. Available online: https://www.laserfocusworld.com/detectors-imaging/article/16555375/photonics-products-scientific-cmos-cameras-scmos-cameras-reach-new-levels-of-capability (accessed on 24 March 2022).
- Winkens, C.; Sattler, F.; Paulus, D. Hyperspectral Terrain Classification for Ground Vehicles. In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications; SCITEPRESS—Science and Technology Publications: Porto, Portugal, 2017; pp. 417–424. ISBN 978-989-758-226-4. [Google Scholar]
- Pinchon, N.; Cassignol, O.; Nicolas, A.; Bernardin, F.; Leduc, P.; Tarel, J.-P.; Brémond, R.; Bercier, E.; Brunet, J. All-Weather Vision for Automotive Safety: Which Spectral Band? In Advanced Microsystems for Automotive Applications 2018; Dubbert, J., Müller, B., Meyer, G., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 3–15. ISBN 978-3-319-99762-9. [Google Scholar]
- Takumi, K.; Watanabe, K.; Ha, Q.; Tejero-De-Pablos, A.; Ushiku, Y.; Harada, T. Multispectral Object Detection for Autonomous Vehicles. In Proceedings of the on Thematic Workshops of ACM Multimedia 2017—Thematic Workshops ’17, Mountain View, CA, USA, 23–27 October 2017; ACM Press: Mountain View, CA, USA, 2017; pp. 35–43. ISBN 978-1-4503-5416-5. [Google Scholar]
- Ulrich, C.; Frieske, B.; Schmid, S.; Stieler, S.; Schwarz-Kocher, M.; Marthaler, F.; Ott, S.; Reinemann, J.; Bickel, P.; Schwarz, S.; et al. Technologiekalender Strukturwandel Automobil Baden-Württemberg (TKBW)—Modulkatalog. 2020. Available online: www.tkbw.de (accessed on 11 January 2021).
- Münster, M.; Brost, M.; Siefkes, T.; Kopp, G.; Beeh, E.; Rinderknecht, F.; Schmid, S.; Osebek, M.; Scheibe, S.; Hahn, R.; et al. U-Shift II Vision and Project Goals. In 22. Internationales Stuttgarter Symposium: Automobil- und Motorentechnik, 1st ed.; Bargende, M., Reuss, H.-C., Wagner, A., Eds.; Springer Fachmedien Wiesbaden; Imprint Springer Vieweg: Wiesbaden, Germany, 2022; pp. 18–31. ISBN 978-3-658-37010-7. [Google Scholar]
- Chan, C.-Y. Advancements, prospects, and impacts of automated driving systems. Int. J. Transp. Sci. Technol. 2017, 6, 208–216. [Google Scholar] [CrossRef]
- Business Insider Deutschland. Artemis: Audi Gibt Einen Einblick in das Geheimprojekt um den A8-Nachfolger. 2021. Available online: https://www.businessinsider.de/wirtschaft/artemis-audi-gibt-einblick-in-das-geheimprojekt-um-den-a8-nachfolger-b/ (accessed on 9 September 2021).
- Boghani, H.; Papazikou, E.; Zwart, R.; Roussou, J.; Hu, B.; Filtness, A.; Papadoulis, A. Defining the Future of Passenger Car Transport: Deliverable D6.1 of the H2020 Project LEVITATE. 2019. Available online: https://levitate-project.eu/wp-content/uploads/2019/11/D6.1-Defining-the-future-of-passenger-car-transport.pdf (accessed on 9 September 2021).
- Crowe, S. AutoX Opens Robotaxi Service to Public in Shenzhen. 2021. Available online: https://www.therobotreport.com/autox-shenzhen-robotaxi-service-opens-to-public/ (accessed on 9 September 2021).
- Boston Consulting Group. Back to the Future: The Road to Autonomous Driving. 2015. Available online: https://de.slideshare.net/TheBostonConsultingGroup/the-road-to-autonomous-driving (accessed on 9 September 2021).
- Boston Consulting Group. Mobility. Available online: https://www.bcg.com/de-de/industries/public-sector/mobility (accessed on 9 April 2021).
- BMVI. Gesetz zum Autonomen Fahren Tritt in Kraft. Available online: https://www.bmvi.de/SharedDocs/DE/Artikel/DG/gesetz-zum-autonomen-fahren.html (accessed on 9 September 2021).
- BMVit. AustrianResearch, Development & Innovation Roadmap for Automated Vehicles. 2016. Available online: https://www.ffg.at/sites/default/files/downloads/call/austrian_roadmap_automated_vehicles.pdf (accessed on 9 September 2021).
- BMW. Autonomes Fahren. Available online: https://www.bmwgroup.com/de/innovation/technologie-und-mobilitaet/autonomes-fahren.html (accessed on 9 September 2021).
- CEDR. MANTRA. 2017. Available online: https://www.cedr.eu/download/D2.1-Vehicle-fleet-penetrations-and-ODD-coverage.pdf (accessed on 9 September 2021).
- Center for Automotive Research. Technology Roadmap: Intelligent Mobility Technologies. 2019. Available online: https://www.cargroup.org/wp-content/uploads/2019/09/Technology-Roadmap-White-Paper.pdf (accessed on 9 September 2021).
- Clavert, S.C.; Wilmink, I.R.; Soekroella, A.M.; van Arem, B. Considering knowledge gaps for automated driving in conventional traffic. In Proceedings of the Fourth International Conference on Advances in Civil, Structural and Environmental Engineering—ACSEE 2016; Institute of Research Engineers and Doctors: Rome, Italy, 2016; pp. 102–111. ISBN 978-1-63248-114-6. [Google Scholar]
- Daimler. Hochautomatisiertes Fahren: Die S-Klasse Fährt Voran. Available online: https://media.daimler.com/marsMediaSite/de/instance/ko/Hochautomatisiertes-Fahren-Die-S-Klasse-faehrt-voran.xhtml?oid=47164442 (accessed on 9 September 2021).
- Deloitte. Urbane Mobilität und Autonomes Fahren im Jahr 2035. 2019. Available online: https://www2.deloitte.com/de/de/pages/trends/urbane-mobilitaet-autonomes-fahren-2035.html (accessed on 13 October 2020).
- e.Go. e.GO Mover Erhält Straßenzulassung. 2021. Available online: https://mediacenter.e-go-mobile.com/de/newspool/pressemitteilung-e.go-mover-erhaelt-strassenzulassung/ (accessed on 9 September 2021).
- EPoSS. European Roadmap Smart Systems for Automated Driving. 2015. Available online: http://www.a3ps.at/site/sites/default/files/newsletter/2015/no08/EPOSS.pdf (accessed on 9 September 2021).
- ERTRAC. Automated Driving Roadmap. 2015. Available online: https://www.ertrac.org/uploads/documentsearch/id38/ERTRAC_Automated-Driving-2015.pdf (accessed on 9 September 2021).
- ERTRAC. Automated Driving Roadmap. 2017. Available online: https://www.ertrac.org/uploads/images/ERTRAC_Automated_Driving_2017.pdf (accessed on 9 September 2021).
- ERTRAC. Connected Automated Driving Roadmap, Brussels. 2019. Available online: https://www.ertrac.org/uploads/documentsearch/id57/ERTRAC-CAD-Roadmap-2019.pdf (accessed on 16 July 2019).
- Europäisches Parlament. Automated Vehicles in the EU. 2016. Available online: https://www.europarl.europa.eu/RegData/etudes/BRIE/2016/573902/EPRS_BRI(2016)573902_EN.pdf (accessed on 9 September 2021).
- Europäische Kommission. The Future of Road Transport: Implications of Automated, Connected, Low-Carbon and Shared Mobility; Publications Office of the European Union: Luxembourg, 2019; ISBN 9789276143185. [Google Scholar]
- Finnish Transport Agency. Road Transport Automation Road Map and Action Plan 2016–2020. 2016. Available online: https://julkaisut.vayla.fi/pdf8/lts_2016-19eng_road_transport_web.pdf (accessed on 9 September 2021).
- Krail, M.; Hellekes, J.; Schneider, U.; Dütschke, E.; Schellert, M.; Rüdiger, D.; Steindl, A.; Luchmann, I.; Waßmuth, V.; Flämig, H.; et al. Energie- und Treibhausgaswirkungen des Automatisierten und Vernetzten Fahrens im Straßenverkehr; Fraunhofer-Institut für System- und Innovationsforschung (ISI): Karlsruhe, Germany, 2019. [Google Scholar]
- Lalli, M. Autonomes Fahren und die Zukunft der Mobilität; Springer: Berlin/Heidelberg, Germany, 2020; ISBN 978-3-662-61811-0. [Google Scholar]
- Wayland, M. Cruise Expects GM to Begin Production of New Driverless Vehicle in Early 2023. 2021. Available online: https://www.cnbc.com/2021/05/13/gm-to-begin-production-of-new-driverless-cruise-vehicle-in-early-2023.html (accessed on 9 September 2021).
- Honda. Automated Drive. Available online: https://global.honda/innovation/automated-drive/detail.html (accessed on 9 September 2021).
- Honda. Honda to Begin Sales of Legend with New Honda SENSING Elite. Available online: https://global.honda/newsroom/news/2021/4210304eng-legend.html (accessed on 9 September 2021).
- Hyundai. Autonomous. Available online: https://tech.hyundaimotorgroup.com/mobility-device/autonomous/ (accessed on 9 September 2021).
- IDTechEx. Autonome Autos, Robotaxis & Sensoren 2022–2042. 2021. Available online: https://www.idtechex.com/de/research-report/autonomous-cars-robotaxis-and-sensors-2022-2042/832 (accessed on 9 September 2021).
- IHS Markit. Emerging Technologies. 2014. Available online: https://autotechinsight.ihsmarkit.com/_assets/sampledownloads/auto-tech-report-emerging-tech-autonomous-car-2013-sample_1404310053.pdf (accessed on 9 September 2021).
- Institute for Mobility Research. Autonomous Driving: The Impact of Vehicle Automation on Mobility Behaviour. 2016. Available online: https://www.bmwgroup.com/content/dam/grpw/websites/bmwgroup_com/company/downloads/de/2016/2016-BMW-Group-IFMO-Publikation-Dezember.pdf (accessed on 19 March 2022).
- Japan Automobile Manufacturers Association. On the Road to Automated Driving: A JAMA Overview of the Advances Made So Far and the Further Progress Required to Make Automated Driving a Reality. 2016. Available online: http://www.jama-english.jp/publications/On_the_road_to_automated_driving.pdf (accessed on 9 September 2021).
- KPMG International. Autonomous Vehicles Readiness Index. 2020. Available online: https://assets.kpmg/content/dam/kpmg/uk/pdf/2020/07/2020-autonomous-vehicles-readiness-index.pdf (accessed on 19 March 2022).
- KPMG. Connected and Autonomous Vehicles—The UK Economic Opportunity. 2015. Available online: https://assets.kpmg/content/dam/kpmg/images/2015/05/connected-and-autonomous-vehicles.pdf (accessed on 9 September 2021).
- Levinson, D. Climbing Mount Next: The Effects of Autonomous Vehicles on Society. 2015. Available online: https://conservancy.umn.edu/bitstream/handle/11299/172960/6%20MJLST_v162_Levinson_787-810.pdf?sequence=1&isAllowed=y (accessed on 9 September 2021).
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning. 2021. Available online: https://www.vtpi.org/avip.pdf (accessed on 9 September 2021).
- McKinsey & Company. How China Will Help Fuel the Revolution in Autonomous Vehicles. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/how-china-will-help-fuel-the-revolution-in-autonomous-vehicles (accessed on 9 September 2021).
- McKinsey & Company. Private Autonomous Vehicles: The Other Side of the Robo-Taxi Story. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/private-autonomous-vehicles-the-other-side-of-the-robo-taxi-story (accessed on 9 September 2021).
- McKinsey & Company. Autonomous Driving. Available online: https://www.mckinsey.com/features/mckinsey-center-for-future-mobility/overview/autonomous-driving (accessed on 9 September 2021).
- Roos, M.; Siegmann, M. Technologie-Roadmap für das Autonome Autofahren: Eine Wettbewerbsorientierte Technik- und Marktstudie für Deutschland. 2020. Available online: https://www.econstor.eu/bitstream/10419/222428/1/1724770225.pdf (accessed on 9 September 2021).
- Morgan Stanley. Autonomous Cars: Self-Driving the New Auto Industry Paradigm. 2013. Available online: https://studylib.net/doc/8717560/autonomous-cars--self-driving-the-new-auto-industry-paradigm (accessed on 9 September 2021).
- NHTSA. Human Factors Evaluation of Level 2 And Level 3 Automated Driving Concepts. 2014. Available online: https://www.nhtsa.gov/sites/nhtsa.gov/files/812043_hf-evaluationlevel2andlevel3automateddrivingconceptsv2.pdf (accessed on 9 September 2021).
- Wyman, O. The True Value of Autonomous Driving. 2015. Available online: https://www.oliverwyman.de/content/dam/oliver-wyman/global/en/2015/jul/Oliver-Wyman-6-11-Automotive-Manager-2015-Autonomous-Driving.pdf (accessed on 9 September 2021).
- Ptolemus. The Autonomous Vehicle Global Study. Available online: https://www.ptolemus.com/research/theautonomousvehicleglobalstudy2017/ (accessed on 9 September 2021).
- PWC. Digital Auto Report. Available online: https://www.strategyand.pwc.com/de/en/industries/automotive/digital-auto-report.html (accessed on 9 September 2021).
- Bernhart, W.; Ernst, C.-S. Israels Automotive & Smart Mobility Industry. 2018. Available online: https://www.rolandberger.com/en/Insights/Publications/Israel%27s-automotive-smart-mobility-industry.html (accessed on 9 September 2021).
- Sächsisches Staatsministerium für Wirtschaft, Arbeit und Verkehr. Auswirkung der Einführung des Autonomen Fahrens auf die Beschäftigung im Öffentlichen Personennahverkehr. 2021. Available online: https://publikationen.sachsen.de/bdb/artikel/37871/documents/58458 (accessed on 9 September 2021).
- Toyota. Toyota Automated Driving. 2020. Available online: https://automatedtoyota.com/docs/10/1a0b46b2c789165fdf296ad6d74e796f2b57837f9/ATwhitepaper.pdf (accessed on 9 September 2021).
- VDA. Automation: From Driver Assistance Systems to Automated Driving; Verband der Automobilindustrie e. V.: Berlin, Germany, 2015. [Google Scholar]
- VDA. Automatisiertes Fahren. Available online: https://www.vda.de/de/themen/innovation-und-technik/automatisiertes-fahren/automatisiertes-fahren.html (accessed on 9 September 2021).
- Volkswagen AG. Volkswagen Nutzfahrzeuge Treibt Die Entwicklung Autonomer Systeme für Mobility as a Service Voran. Available online: https://www.volkswagenag.com/de/news/2021/02/volkswagen-commercial-vehicles-moves-ahead-with-autonomous-drivi.html (accessed on 9 September 2021).
- Waymo. FAQ. Available online: https://waymo.com/faq/ (accessed on 9 September 2021).
- Yole Développement. Sensors and Data Management for Autonomous Vehicles. 2015. Available online: https://yole-i-micronews-com.osu.eu-west-2.outscale.com/uploads/2019/03/Yole_Sensors_and_Data_Management_for_Autonomous_Vehicles_October_2015_Sample.pdf (accessed on 23 August 2019).
- ZF-Friedrichshafen AG. Magazin. Available online: https://www.zf.com/corporate/de_de/magazine/magazin_artikel_viewpage_22123624.html (accessed on 9 September 2021).
- ZF-Friedrichshafen AG. In Fünf Schritten zum Selbstfahrenden Auto. Available online: https://www.zf.com/mobile/de/stories_2497.html (accessed on 9 September 2021).

| SAE Level | Title |
|---|---|
| 0 | No Driving Automation |
| 1 | Driver Assistance |
| 2 | Partial Driving Automation |
| 3 | Conditional Driving Automation |
| 4 | High Driving Automation |
| 5 | Full Driving Automation |
| Level | Title | Description |
|---|---|---|
| TRL 1 | Basic research | Fundamental principles reported; scientific research conducted; performance predicted |
| TRL 2–4 | Technological research | Technology component and/or basic subsystem validated in the laboratory or in a test environment; basic concept observed in other industries; requirements and interactions with relevant vehicle systems identified |
| TRL 5–8 | Product demonstration | Testing and demonstration phases completed; technology proven in its final form and under the expected conditions; performance validated |
| MRL 8 | Initial production | Initial production up and running; manufacturing and quality processes proven in the production environment; early supply chain established and stable |
| MRL 9 | Mass production capability demonstrated | Capability for mass production demonstrated; key system design features stable and proven in testing and evaluation; materials available to meet projected volume production; manufacturing processes established |
| MRL 10 | Successful mass production proven | Full rate production demonstrated; engineering changes limited to quality and cost improvements; system, components, etc., are in volume production and meet all design, performance, quality and reliability requirements; all materials, manufacturing processes, inspection and test equipment are in volume production and controlled for quality assurance purposes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ulrich, C.; Frieske, B.; Schmid, S.A.; Friedrich, H.E. Monitoring and Forecasting of Key Functions and Technologies for Automated Driving. Forecasting 2022, 4, 477-500. https://doi.org/10.3390/forecast4020027
Ulrich C, Frieske B, Schmid SA, Friedrich HE. Monitoring and Forecasting of Key Functions and Technologies for Automated Driving. Forecasting. 2022; 4(2):477-500. https://doi.org/10.3390/forecast4020027
Chicago/Turabian StyleUlrich, Christian, Benjamin Frieske, Stephan A. Schmid, and Horst E. Friedrich. 2022. "Monitoring and Forecasting of Key Functions and Technologies for Automated Driving" Forecasting 4, no. 2: 477-500. https://doi.org/10.3390/forecast4020027
APA StyleUlrich, C., Frieske, B., Schmid, S. A., & Friedrich, H. E. (2022). Monitoring and Forecasting of Key Functions and Technologies for Automated Driving. Forecasting, 4(2), 477-500. https://doi.org/10.3390/forecast4020027