2. Potentialities of Deep Water Shipwreck Investigation
Deep water contexts are of great interest for many reasons. They are very important to the study of direct and offshore routes [
2] given that 98% of known shipwrecks lie a few miles from the coast, which means that known sites in deep waters, far from the coast, are still very rare.
On the other hand, the location of a shipwreck more than 4 or 5 miles from the coast does not automatically mean that the ship was sailing an offshore route without the possibility of visually following the coast. Instead, storms or the loss of the ability to control the route, because of the rudder or the sail breaking, could push the ship adrift. An example is the story of the
Querina ship which, in 1431, after a storm that dismantled its rudder and its sails, was pushed by the sea from the Channel to the coasts of Norway after more than one month of sailing without any control [
3].
However, this is only one of hundreds of examples that we could cite from any period. Indeed, the location of a shipwreck does not always imply that the ship lost its route at the same point [
2].
Notwithstanding these limits, the position of a shipwreck located offshore can be considered to reconstruct the maritime space and maritime connectivity in the past. We can study the types of routes (both tramp trade and freight line), the connections among small harbours or direct lines among main harbours, and the regional or interregional trade. The study of trade models, without chronological limits, can benefit greatly from the identification of shipwrecks offshore. It would be interesting to determine whether these ships were bigger or more/differently equipped in comparison to those that sailed close to the coast, which kind of goods were moved offshore and, obviously, what the routes were. In some cases, this kind of route far from the coast was necessary. This is the case of the Roman ships of the
annona, which had to sail from the North African shores to Rome while crossing the Channel of Sicily. Since they could sink in deep water, far from the coast and very far from the better-investigated maritime space, we have still not recognized them, although knowledge from them would be crucial for the study of the Roman economy.
1 Similarly, knowledge could be garnered regarding traffic directed to the great and small isolated islands, such as Sardinia, Corsica, Cyprus and Malta.
Shipwrecks located offshore can also be useful in studying the techniques of sailing and navigation. This is particularly interesting for the Ancient and Medieval periods of which we have poor information from traditional sources. For example, it seems very important to understand whether the ships that frequented the Mediterranean in the Greek and in the Early Medieval periods, which, according to what we know, had a limited tonnage, were technically able to sail for long distances offshore, like the Roman
onerariae represented by the Madrague de Giens and the Albenga shipwrecks, and by many ships carrying marble stones [
6].
Deep shipwrecks often retain a relatively “good” level of conservation. Given that these ships did not impact against reefs or crags, and that they usually sank intact, their aspect is seldom compromised by the dynamic of the shipwreck. Indeed, the ships can reach the sea bottom in correspondence with the position of navigation, and remain intact on the sand, often with the cargo in a whole state, as it had been on the surface. This is evident from the observation of hundreds of shipwrecks, especially ancient cargos of amphoras, stones blocks, or building materials dated from the Greek to the Medieval period.
The depth, then, permits relatively good protection from treasure hunters, who can seldom exceed a depth of 100 metres, although very well-equipped pirates, breaking national laws and the UNESCO Convention on the Protection of the Underwater Cultural Heritage (2001), visited deeper sites such as the 1000 m deep wreck of the
Nuestra Senora de las Mercedes [
7] and the Spanish galleon
San José, sunk off Columbia on a seabed at 600 m deep (
https://www.cbsnews.com/news/san-jose-shipwreck-colombia-200-tons-treasure/ (accessed on 20 July 2022)).
The depth also provides protection from the impact of trawling nets. In the Mediterranean, down to many hundreds of metres, these are the most devastating actors for shipwrecks [
8]. The depth can permit the survival of the sites, which either are sufficiently deep or are protected by the morphology of the seabed or are in an area not attended by fishing vessels. On the other hand, the experience of the shipwrecks of the Adriatic demonstrates that, in shallow waters, underwater sites can survive only thanks to the protection of very irregular rocky sea bottoms, with deep cavities, or the covering of a thick layer of sand [
9].
The environment of the deep sea of the Mediterranean, as opposed to the Baltic sea and the anoxic waters (below 600 feet) of the Black Sea, is not so favourable to the conservation of organic material because the high temperatures are conducive to organic activity.
Xylophaga is, of course, able to survive until about 200/300 m, where it is still able to attack wood, but some non-archaeological studies have hypothesized that it can live much deeper [
10,
11]. The observation of many deep shipwrecks suggests that
Xylophaga can live also in deeper waters, since in the Mediterranean Sea it is very rare to find traces of archaeological wood not protected by sand. There is a lot to investigate regarding the formation of concretions over pottery and metal objects in deep water because, in some cases, they are absent, while on some sites they are present and quite thick. It also seems that corrosion has no limits in terms of depth [
12], while sedimentation is clearly much reduced because of the absence of hydrodynamism able to move the sand.
A totally different case can be found in the formation processes in the deep sea bottoms of the Baltic Sea [
13,
14] and the Black Sea [
15], where recent and less recent discoveries have returned shipwrecks with wood in excellent states of conservation.
3. The First Steps of the Deep Water Archaeology in Italy and Tuscany
Stereoscopic images of the 7th century AD shipwreck of Yassi Ada carried out in 1964 by the mini submersible
Asherad can be considered the first case of using deep water technology in underwater archaeology to integrate the work of divers [
16]. After this experience, carried out by the team of the University of Pennsylvania, in Turkish waters, a similar activity was carried out at Lipari by a mini submarine belonging to the Italian Sub Sea Oil Services operating in collaboration with the archaeologists of the Institute of Nautical Archaeology. The expedition, composed in part by a team of divers working in saturation aboard the Italian ship Corsair between 1976 and 1978, completed the investigation on the Hellenistic shipwreck, lying about 60 m deep, but with scattered finds 90 m deep, where, in 1969, the director and the assistant of the
Deutsches Archäologisches Institut of Rome tragically lost their lives [
17].
In the same years, another Italian company, the Snamprogetti, in the Sicily Channel, made a quick survey, through images and remote sensing for the position, with a mini submarine of a shipwreck with 5th century BC amphoras at a depth of 530 m [
18]. After these cases, we had to wait many years before an Italian company or institution carried out other missions of this kind.
At the end of the 1980s, the French technical service Infremer, while engaged in the recovery of pieces of the DC 9 airplane off Ustica on a sea bottom that was 3200 m deep, happened to discover a cargo of the 6th century AD with African amphoras [
19]. This find offered us the first evidence of the potentialities of deep-water archaeology, albeit as the result of a non-scientific mission.
In France in the 1980s, archaeologists from DRASSM (Département des recherches archéologiques subaquatiques et sous-marines) had already carried out some important deep-water investigations on Roman shipwrecks using technology and without the direct presence of divers [
7]. Photogrammetric documentation and small recoveries of finds were carried out with ROVs
2 and mini submarines in 1981 on the Bènat 4 shipwreck that was on a sea bottom of 328 m, and in 1987, on the Basses de Can site that was on a sea bottom of just 80 m. Moreover, these French activities continued, in 1993 on the 662 m deep Arles 4 shipwreck, in 1996 on the Sud-Caveaux 1 site that was 64 m deep, and in 2000 on the Grand Ribaud F shipwreck that was 60 m deep. Such activities became quite common in the DRASSM programs of investigation [
20].
A study carried out quite close to the Italian coast, and which left its mark on the discipline, was the JASON project, coordinated by the oceanographer R.D. Ballard and the archaeologist A.M. McCann on the Skerki Bank in the Channel of Sicily [
21]. Here, in 1989, a US mission using a ROV on a sea bottom of 818 m recovered some finds in international waters. This mission then continued over several years, also along the Italian coasts [
4], and received critical reactions among some Italian archaeologists (La Repubblica, 2.8.1997,
https://ricerca.repubblica.it/repubblica/archivio/repubblica/1997/08/02/america-ruba-nostri-tesori.html (accessed on 20 July 2022)). Ballard’s team, in 1999, west of Israel, surveyed also two 400 m deep Phoenician shipwrecks of the 8th century AD [
22].
Research in this field conducted by Italian institutions arrived much later than in France. In 1999, the Soprintendenza per i Beni Archeologici della Toscana organized a prospection on the 177 m deep Roman shipwreck Elba-sud, close the island of Elba, thanks to the collaboration of the private French company Comex [
23,
24]. In 2004, as part of the Archeomar project conducted by the Ministry of Cultural Heritage and Activities, Comex, tasked with the explorations, discovered a Roman shipwreck on the 92 m sea bottom close the island of Capri (
www.archeomedia.net, accessed on 20 July 2022). In 2010, during this project, at the Scoglietto di Portoferraio (Elba), at a depth of 78 m, Comex and Aurora Trust documented a cargo of Maiolica pottery from the 18th century. In the same year, the project allowed the study of a cargo of
dolia off the southern coast of the Gorgona Island on a sea bottom of 178 m [
25].
Other Italian superintendencies, such as the Soprintendenza del Mare of Sicily, collaborated with the Aurora Trust Foundation to carry out investigations on deep shipwrecks at Ventotene (2008–9), Capri (2010–11), Panarea (2010 and 2015) and Messina [
25,
26] (
www.auroratrust.com, accessed on 20 July 2022). Since 2005, the Soprintendenza del Mare, thanks to the collaboration of the RPM Foundation, has also worked with ROVs on the 90 m deep sea bottom of the Favignana island where the
rostra were found [
26]. In this case, technology was used to assist the work of technical divers at a depth that could be reached by human divers. The same kind of experience of ROVs in collaboration with divers was carried out, in 2009–2010, on the 65 m-deep shipwrecks with
dolia of Marciana Marina (LI) by the Soprintendenza of Tuscany and the Politecnico della Marche [
24].
With the exception of the latter, all these studies undertaken by Italian institutions were possible thanks to the collaboration of French and USA companies and trusts—sometimes under contract, as in the case of the Archeomar project. Other discoveries and investigations were made by chance on the occasion of offshore works, such as the recently explored Archaic shipwreck investigated at 780 m in the Canale d’Otranto under the coordination of the Soprintendenza Nazionale per il Patrimonio Culturale Subacqueo during the installation of pipes (
www.ansa.it, accessed on 16 October 2021);
www.patrimoniosubacqueo.it/il-relitto-alto-arcaico-del-canale-di-otranto/ (accessed on 20 July 2022)).
4. Experiences of Deep Water Investigation by ROVs in the Tyrrenian Sea with the Azionemare Foundation
In recent years, ROVs have been increasingly used to explore the depths, playing an important role in various fields of marine scientific research, and allowing the broadening of knowledge in the field of maritime archaeology [
27,
28]. ROVs suitable for deep water investigations (>300 m) are generally heavy and bulky, and must be supported by large expensive survey vessels, the associated costs being well beyond the reach of scientific researchers who, in most cases, do not have adequate funds. The Azionemare Foundation has tackled the problem and has adopted non-standard and intelligent solutions.
The main tools needed for the research and study of a wreck at depths between 150 and 1000 m are:
- -
a long-range sonar able to detect the morphology of the bottom and the presence of any object;
- -
capacity for georeferencing a particular anomaly detected by the sonar on the seabed;
- -
a vessel equipped with dynamic positioning, capable of moving to the vertical above the anomaly and remaining stationary, automatically controlled by a computer;
- -
an ROV to be sent to the bottom to recognize the nature of the anomaly and to study it in the case of an ancient wreck.
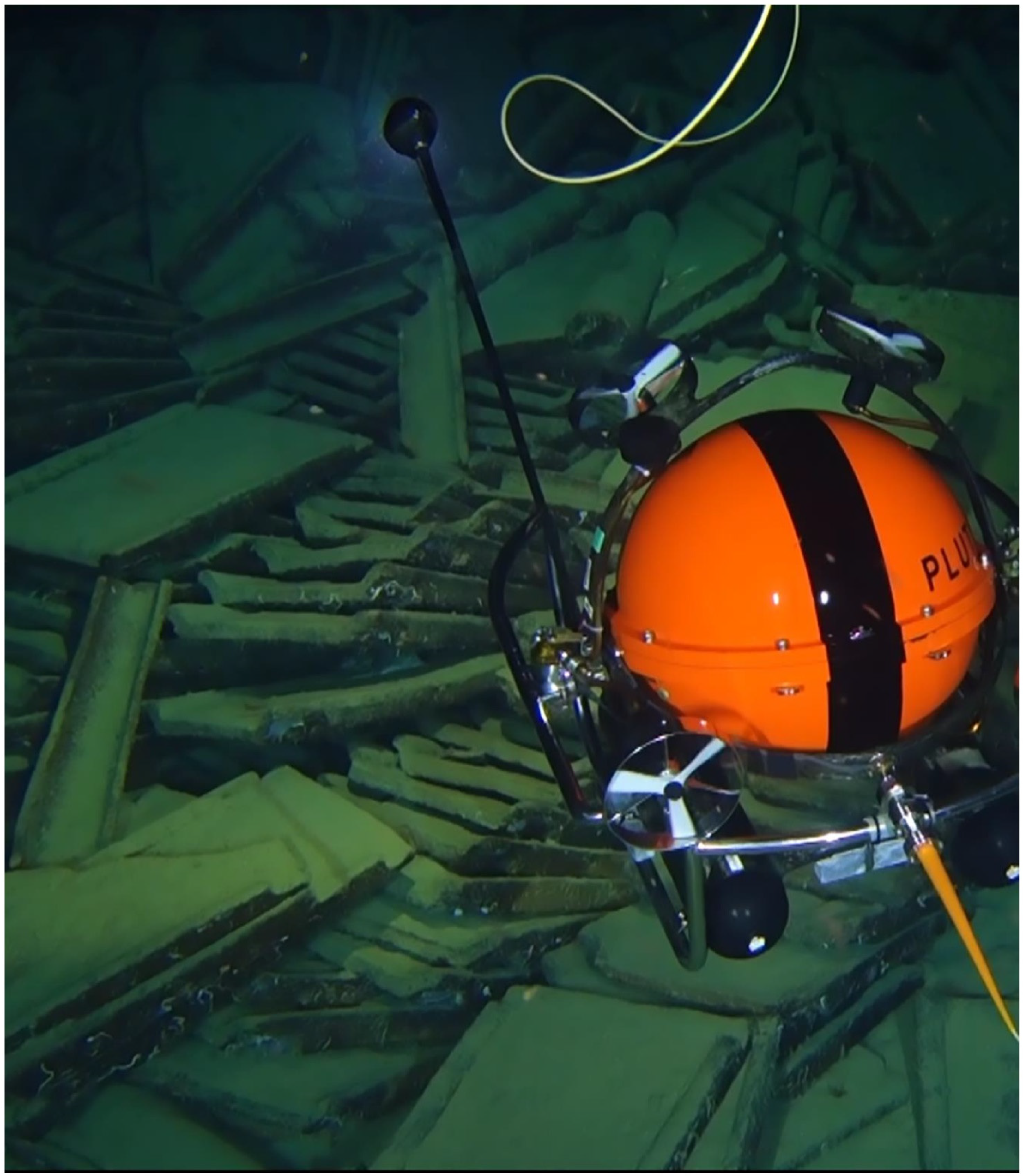
Guido Gay has created a company that, for 40 years, has been producing Pluto ROVs (
Figure 1) used by the Military in mine-hunting jobs. Years ago, he had the opportunity to build a vessel also suitable for experimenting with the Plutos. Among various solutions, he chose to design and build a sailing catamaran. Thus was born the Daedalus, a 21 m long catamaran completely different from the shapes currently in use (
Figure 2). This was a fast, stable, spacious and comfortable boat, equipped with dynamic positioning and all the instruments necessary to explore the deep seabed, as well as a workshop-laboratory and a control room (
Figure 3) for working with two Pluto wire-guided submarine vehicles. Automatisms and servos allow a single person to maneuver the whole boat.
To decide where to dive the Pluto in order to see something of interest, it is necessary to explore the seabed with a sonar. An inexpensive but effective solution has been found in a specifically designed transducer built on purpose, mounted on the catamaran’s hull and connected to a normal hydrographic sounder transceiver. The result is a side-scan sonar capable of “photographing” the seabed up to 1500 m deep at a rate of over 20 square kilometers per hour. A mound of Roman amphoras is seen by the sonar as a shaded spot, and the same sonar is then able to determine its precise geographical position. Once a sonar anomaly has been detected and located, it is necessary to go and verify it with the eyes of the camera. Either Pluto Palla (
Figure 4) or Multipluto can carry out this task. These two vehicles are also original developments. Small and with unparalleled performance, they are a development of the others. They weight only 60 kg and can reach a depth of 2000 m. Of course, they shoot stills and take high-resolution video, they carry a manipulator arm, and, with particular tools, they hook and retrieve artifacts (
Figure 5). The Plutos are equipped with instruments to navigate with precision and can take shots intended to be processed in photomosaics and three-dimensional models (see further). The Daedalus catamaran therefore has the performance of an oceanographic vessel, but surprisingly enough, she operates with only two crew members at fractional costs and with great flexibility of intervention.
Except in difficult weather conditions, the long-range sonar is always activated when underway. The emission occurs with a 50 kHz ultrasound beam in the shape of a vertical fan oriented laterally perpendicular to the motion of the boat, so as to strike a strip of seabed about one kilometer wide on the left side of the catamaran. The beam is quite narrow, at about two degrees, and the advancement of the boat allows one to construct an image of the bottom seen not perpendicularly downwards but in profile; in this way any objects stand out very clearly.
A computer records on the nautical chart both the boat’s course and the strip of seabed hit by the sonar. Sonar images of the same bottom stripe are stored in another folder. A subsequent navigation will be adjacent to the corridor already explored, in order to widen the beaten area without leaving unexplored points. To date, mainly in the Tyrrhenian Sea, areas of the seabed reaching about 14,000 square kilometers have been explored. The potential of the sonar is optimized in sandy and muddy bottoms, where a wreck is more easily identifiable than a rocky bottom. If an anomaly in the seabed raises the suspicion that it is an ancient wreck or something else of interest, the Daedalus makes various orthogonal passes at an appropriate distance, and the fine beam of the sonar determines two or more bearings referred to the boat, so that the underwater position can be calculated with a good geographical accuracy (20 m). At this point, dynamic positioning comes into play; this is a device that manages to keep the ship stationary on the located anomaly by acting on auxiliary thrusters that can be activated by a computer automatically.
Generally speaking, only medium or large vessels specialized for research or underwater work are equipped with this system. In Italy, none of the research vessels available are equipped with dynamic positioning. Only oil works vessels or military mine-hunters are fitted with dynamic positioning capabilities.
The Daedalus catamaran has been designed as an innovative sailing pleasure yacht with the addition of several features designed and built in house, suitable for scientific activity. One of them is the DP, a propeller that is normally hidden in the hull, which can extend out into the water when necessary. The computer controls its orientation and rotation speed in order to keep the boat steady against the current and against the wind. This is a job that could also be done manually but would require a dedicated person. The DP will maintain the position of Daedalus under the conditions of 12-knot wind and 2-knot tide, in seastate 3.
The project concepts of the Pluto Palla and Multipluto are original and unusual. The original idea behind these developments lies in the extreme homogeneity of the project, which includes the development and production of most of the subsystems, to better match the characteristics of each other and to obtain a vehicle with maximum performance with the lowest mass, as well as a very compact footprint. In fact, nothing exists today that comes close to the performance of the Pluto, which can explore as deep as 2000 m with a 60 kg vehicle, as well as another 60 kg remote-controlled cable drum, and which remains there to work for 8 h.
Pluto Palla and Multipluto are observation and light-manipulation vehicles. The photo video camera used is an off-the-shelf Sony RM-100 V with a 20 Mpixel HD video sensor (4K version also available), modified to be controlled from the surface. In fact, high-quality photos and videos are recorded by remote control in the camera itself, while navigation and orientation data are recorded every minute on the audio track by a synthetic voice. The porthole is compensated acrylic optical. The lighting is supplied by nine headlights of 4000 lumens each, arranged in such a way as to illuminate the best in terms of both the distance, reducing backscattering, and up close. The camera is housed in a small head mounted on a gooseneck with full pan and tilt and the ability to adjust the elevation; from bottom contact to the macro shooting of small objects, it can rise over the top of the vehicle to observe the whole of the upper hemisphere. The vehicle employs a propulsion system that can push it up to 3 knots and is designed to not raise dust in the observation area. The manipulator arm can lift heavy objects up to 10 kg. A special hook connected to a separate line can be carried by the Pluto to engage the handle of an amphora and retrieve it. Current conditions in the Mediterranean only affect the first 50–100 m from the surface and can be easily overcome by ballasting the cable. At depth, the current can reach a few tenths of a knot.
Normally, to go down to depths of, for example, a thousand meters, heavy equipment must be used that can only be installed on ships of adequate tonnage, for example the André Malraux of the French DRASSM (233 tons versus 29 tons of the Daedalus); the Plutos, on the other hand, is battery-powered, thus eliminating the large umbilical cable that carries energy from the surface down to the vehicle. The roller of this cable constitutes the bulk and is the most important weight of all the other vehicles, which imposes the use of ships. The potential benefits of such a light and compact instrument are many, such as for the recovery of instrumentation (in one case, Multipluto recovered a disabled Hugin AUV from 700 m, and in another a military object of 500 kg from 1000 m depth), as well as for the identification and inspection of ancient and modern wrecks, as in the case of the cruiser Giovanni dalle Bande Nere sunk in World War II and lying at a depth of 1750 m.
The Multipluto ROV can be transported in a normal car, loaded by hand on boats and used without the need for system installation. Recovery and deployment can be done by sliding the vehicle by hand or using a small davit. All these tools make the Daedalus catamaran capable of replacing an expensive research vessel for exploration, investigation, surveying and study at great depth, which may also involve light manipulation.
In ten years of navigation exploring the Ligurian and the Tyrrhenian Seas, the Daedalus has discovered 43 wrecks from the Roman era lying at depths between 150 m and 900 m, as well as 24 modern wrecks including the Battleship Roma at 1200 m deep. By considering only the 43 ancient Roman wrecks, Azionemare has located, inspected and identified each and all of them. In general, it was immediately realized that all but three had been affected by damage due to the passage of trawling nets. Many deposits have been totally devastated by the fishing nets, while others show only the first layer of amphorae upset and crushing. This was believed to be the most serious conservation problem, as opposed to looting on coastal deposits accessible to scuba divers.
Studies and samplings have been carried out on some of these wrecks in collaboration with the competent authorities. For example, on the Daedalus 26 wreck located south of Portofino at a depth of 710 m, two photomosaics were made at a two-year interval: they were almost unrecognizable, so significant was the upheaval and the dispersion of the amphorae [
29].
Sampling operations of finds were carried out on about ten wrecks thanks to the use either of a special hook, carried out by the ROV and linked to the boat by a thin line capable of lifting a maximum of one hundred kilos of weight, and to the manipulator arm, which can tighten with delicately adjustable force in order not to damage fragile objects. When it has been planned to recover a certain number of small finds, the manipulator can place a container on the bottom, and each object can be deposited inside it; when full, the same manipulator can grab the container and bring it back to the surface together with the vehicle.
5. Experience of Photogrammetric Documentation on Tyrrhenian Deep Shipwreck
ROVs are widely used for mapping and monitoring cultural and natural heritage, or to document the phases of the work of archaeologist during excavation; their main application is linked to photogrammetric surveys for documentation [
15,
30,
31]. Important results of the application of the photogrammetric technique in deep waters have been obtained from recent studies through collaboration with the Azionemare Foundation.
After some short studies with low-cost self-built ROVs, in which the quality of the underwater photogrammetric survey was tested through an accurate comparison between images and video footage of different cameras [
32], the team of the Ca’ Foscari University of Venice had the opportunity to create synergy between its photogrammetric skills and the most advanced technologies of Azionemare. As part of the projects “The routes of ancient marble” and “Digital photogrammetry in underwater archaeology”, it was possible to document and study two important wrecks in the Tyrrhenian Sea, Dae37 and Dae27
3. The documentation of the two shipwrecks was realized using a professional camera directly mounted inside the head of the ROV with the support of eight lateral external lights for environmental illumination. The processing and the alignment of extrapolated frames (831 for Dae37 and 3668 for Dae27) from the videos was realized with Agisoft Metashape and resulted in an accurate photogrammetric model. The versatility of photogrammetry allows the application of this technique in contexts where natural light is totally absent and the archaeological site is visible only with powerful artificial lights; the effect of the changing shadows on the subject is reduced thanks to the wide overlap between the strips, realized in a bustrophedic way, and it is largely resolved through the algorithms of the latest generation of photogrammetric software [
15,
30,
33].
The first experimentation of the photogrammetric technique was carried out on Dae37, a large cargo of 17 lithic (presumably marble) blocks, with dimensions from 2 to 4 m, with a minimum thickness of 20 to 100 cm and Dressel two to four amphoras dated to the 1st century AD, which sank a few miles northwest of the island of Gorgona at a depth of 280 m (
Figure 6). The survey was carried out with the use of Multipluto which, through remote-controlled navigation, documented the site with parallel and overlapping strips realized in both directions (longitudinal and transversal to the shape of the site) in order to represent the details of the blocks and obtain an accurate model of the complete cargo.
Photogrammetry is important for surveying underwater archaeological sites, but it is also useful as a base for the analysis and calculation of the tonnage of the cargos [
6,
34]. In order to obtain the volumes of the blocks and calculate their weight, first, the model has been scaled thanks to the known measures of two different types of Dressel 2–4, recovered from the shipwreck thanks to a specific hook on the ROV, and both of them have been documented directly on board through a photogrammetric survey. Then, the individual meshes of the marble blocks were extrapolated from the sea bottom, and they were processed and closed in the invisible portion of marble; for this operation, we have chosen two different methods of processing the tonnage. First, we have calculated the minimum tonnage, creating a surface on the side directly in contact with the sea bottom; then, a slightly heavier tonnage has been calculated, hypothesizing the hide height of the block by analysing the completely visible blocks and subdividing the blocks into different categories.
With this technique, it was possible to weigh the biggest block, which was 100 tons, and then double the weight of all the other blocks, resulting in an apparently unbalanced configuration and assessment of the marble cargo, with much more weight on one extremity than on the other one.
A second mission was carried out on the Dae27 wreck, a cargo of Roman Dressel 1 amphoras and tiles, sunk at a depth of 640 m off the island of Pianosa. This archaeological site is really important for different reasons: the cargo is preserved inside a pit, probably created by the impact of the shipwreck on the sea bottom, presenting an interesting situation regarding the formation process of shipwrecks, and it represents rare evidence of the long-range transport of material for roof construction. The shipwreck could be dated around the 2nd or 1st century BC, but extensive study and analysis will be conducted after the recovery of an amphora and a tile during the next campaign.
This survey, as for the Dae37, was made using the images taken by the Multipluto, which, in this case, made radial and concentric strips following the mound conformation of the wreck; the survey was particularly difficult due to the numerous objects and the conformation of the finds, which required thousands of frames to represent the cargo in detail (
Figure 7 and
Figure 8). The photogrammetric 3D model provided documentary evidence of the characteristic of the mound of the cargo and the pit that contains the shipwreck, thus allowing important analysis of the shipwreck; it is possible to approximately calculate the number of amphoras and tiles and the hypothetical volume and weight of the cargo, as completed in other contexts [
9].
6. Aspect of the Mediterranean Deep Shipwrecks
When observing the ancient shipwrecks investigated by the Azionemare Foundation, we can make some interesting observations regarding their aspect in comparison with other shipwrecks of the Mediterranean. Indeed, the facies of these sites are similar, with most of them being dated to the Greek or Roman period; they are cargoes of non-perishable goods, such as amphoras, stone blocks, tiles, pottery and metal ingots. These are of course the less perishable materials, but also the more visible cargoes. Their appearance is often coherent, retaining the organization they had aboard.
The result of the disappearance of the wooden deck is particularly evident in the Dae 39 shipwreck, a cargo of Dressel 1B amphoras preliminarily dated to between the end of the 2nd and the end of the 1st century BC. The location on the top of the amphoras cargo of a
doliolum (
Figure 9a), a few tiles (
Figure 9b) and a rotary milestone (made by
meta and
catillus) (
Figure 9b) indicates that, originally, these objects were, of course, on the deck and that, after the degradation of the wood, they collapsed. The location of the rotary millstone on the top of the cargo can also be seen on other Mediterranean archaeological sites, such as the Roman cargo documented by the Aurora Trust off Messina (
www.auroratrust.com (accessed on 20 July 2022)) or the wreck at Skerki bank [
21]. We know that millstones were often used aboard to mill the grain, and that they were not merely the object of trading [
35].
The location on an extremity of the shipwreck of lead stocks of unpreserved wooden anchors is evidence of their original position on the presumed bow of the ship [
36]. This is a frequently recurring situation, which can be seen in the Dae 22, 33/34, but which is particularly evident on the Dae 27, on the Dae 42 (
Figure 10a) and on the Dae 39. On this last shipwreck, the extremity of the presumed bow also hosts an iron arrow-shaped anchor (
Figure 9c). The presence of the anchors in this position is fairly frequent on other deep shipwrecks.
A careful observation of these sites sometimes allows pottery items to be identified, which were presumably part of the crew’s equipment. The distinction between this pottery and the cargo is possible thanks to the limited numbers of pieces and their isolated position on an extremity. This can be appreciated on the Dae 42 shipwreck, a cargo of Dressel 1C, Brindisine and Lamboglia 2 amphoras, preliminarily dated between the end of the 2nd and the middle of the 1st century BC (
Figure 10a–c). On this site, it is also possible to see some lead ingots, which could be a secondary part of the cargo (
Figure 10b).
On none of these sites did we recognize organic finds, a situation that confirms the fact that, aboard an ancient ship, differently to what happened on Late-Medieval or later vessels, both the equipment and the personal belongings, except for very small objects, which are not easy to recognize on the seabed, and the pottery, were mainly made of perishable materials [
37]. The recent discovery of Roman ships in excellent conditions in the deep waters of the Black Sea confirms this image, because its preliminary observation does not show objects made with materials different from wood and ropes, such as metal [
15] and the numerous images and videos on the web].
Among the post-depositional formation processes of these deep shipwrecks, we can include the entrapment of garbage. Indeed, the shipwreck is a trap on the seabed for plastic, glass, ropes and any kind of garbage lost by fishing boats and other vessels (
Figure 11).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}