
A Termination Criterion for Probabilistic Point Clouds Registration


Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
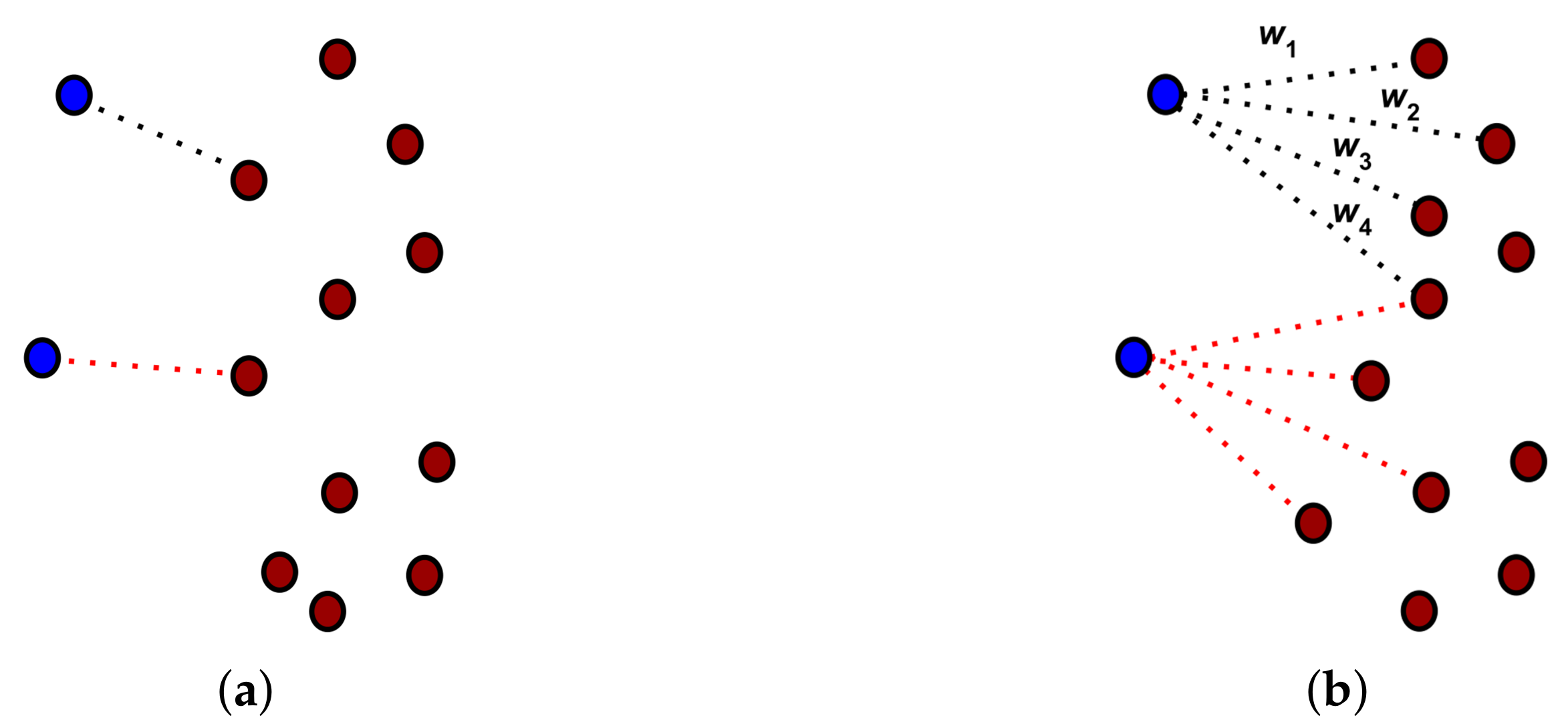
3.1. Probabilistic Point Clouds Registration
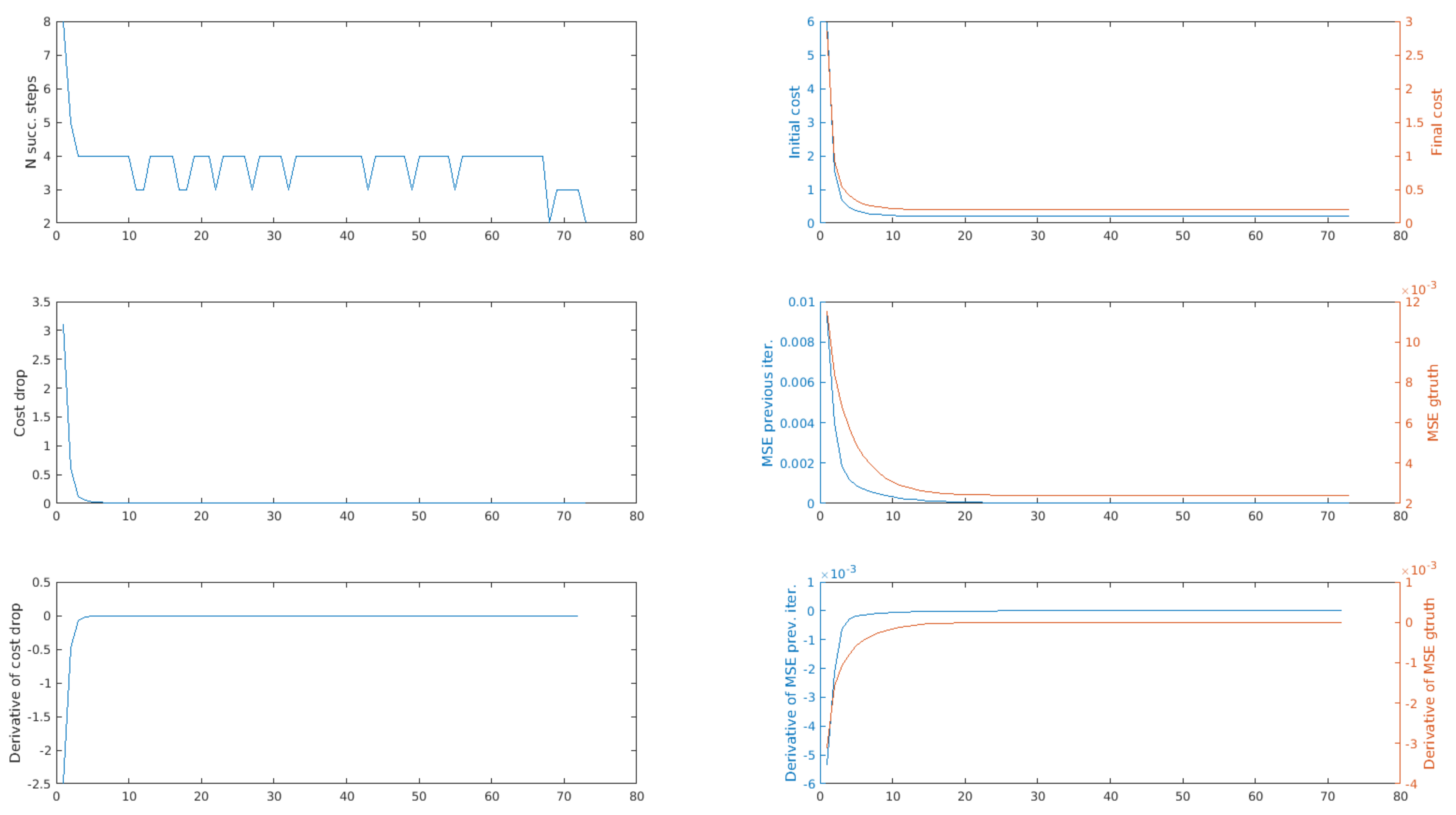
3.2. Termination Criteria
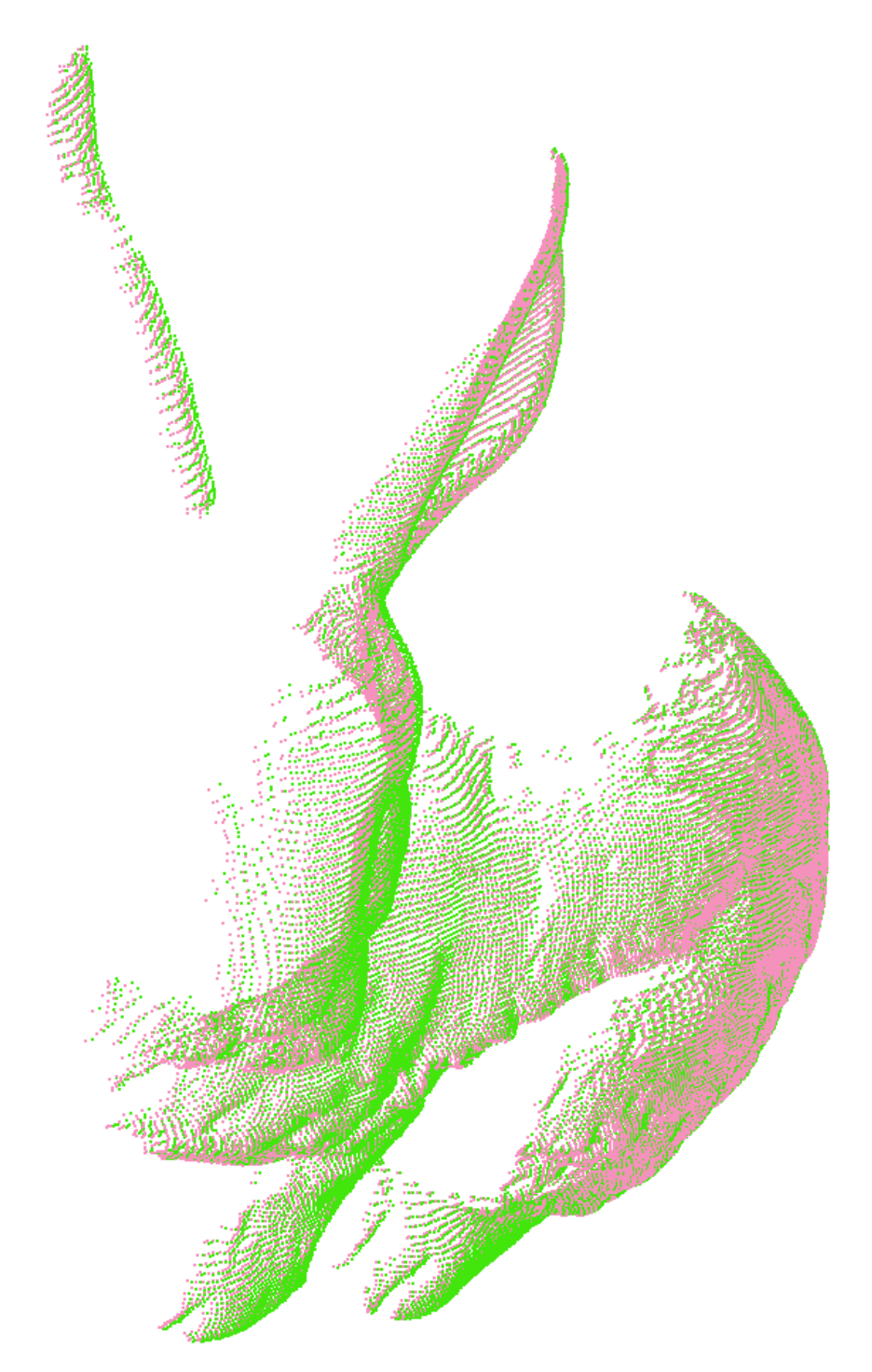
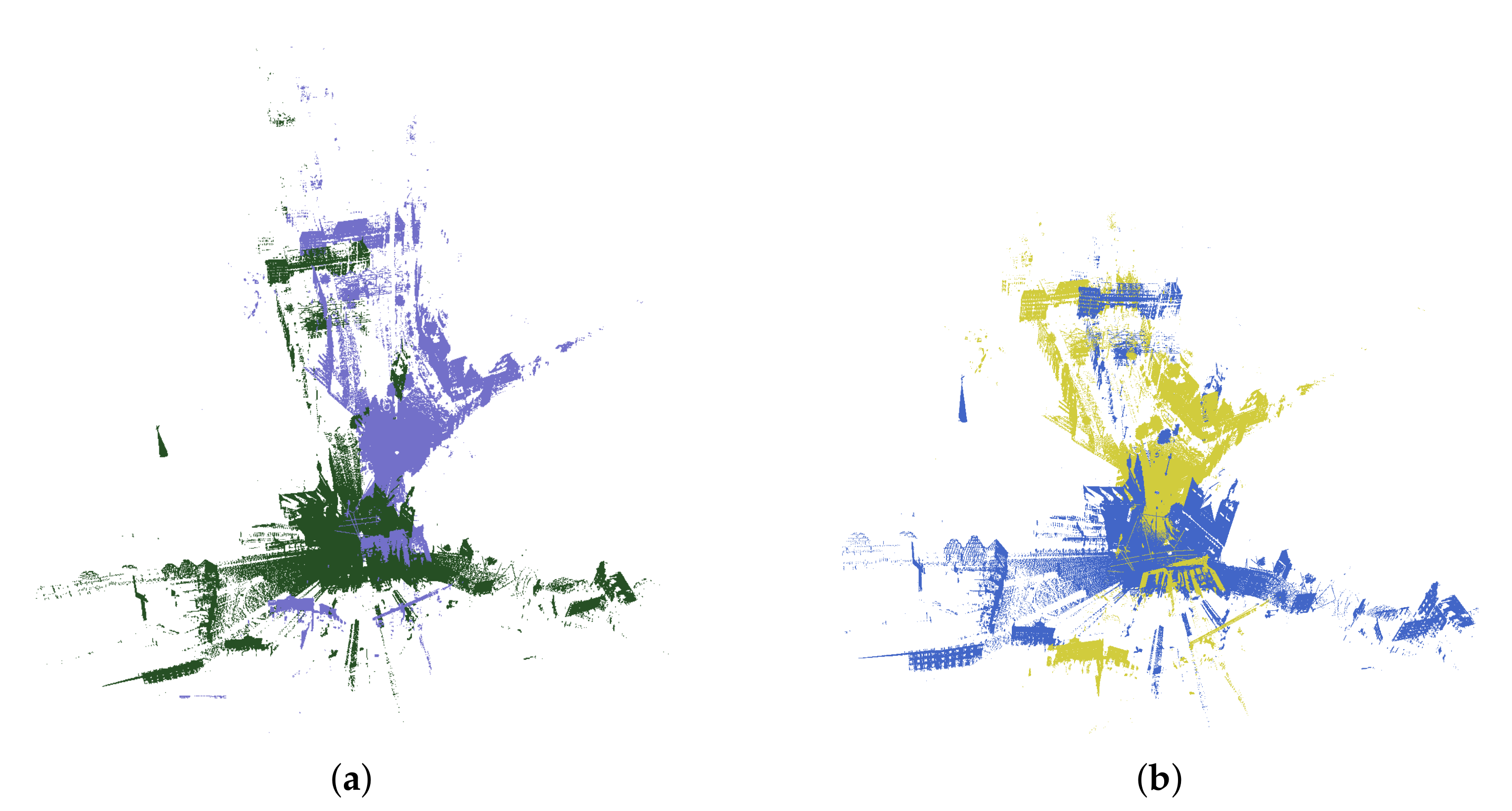
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PPCR | Probabilistic Point Clouds Registration |
| ICP | Iterative Closest Point |
| MSE | Mean Squared Error |
References
- Besl, P.; McKay, N.D. A method for registration of 3-D shapes. Pattern Anal. Mach. Intell. IEEE Trans. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modeling by registration of multiple range images. In Proceedings of the Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 2724–2729. [Google Scholar]
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Int. J. Comput. Vis. 1994, 13, 119–152. [Google Scholar] [CrossRef]
- Agamennoni, G.; Fontana, S.; Siegwart, R.Y.; Sorrenti, D.G. Point clouds registration with probabilistic data association. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4092–4098. [Google Scholar]
- Holz, D.; Ichim, A.E.; Tombari, F.; Rusu, R.B.; Behnke, S. Registration with the point cloud library: A modular framework for aligning in 3-d. IEEE Robot. Autom. Mag. 2015, 22, 110–124. [Google Scholar] [CrossRef]
- Fontana, S.; Cattaneo, D.; Ballardini, A.L.; Vaghi, M.; Sorrenti, D.G. A benchmark for point clouds registration algorithms. Robot. Auton. Syst. 2021, 140, 103734. [Google Scholar] [CrossRef]
- Rusu, R.; Blodow, N.; Marton, Z.; Beetz, M. Aligning point cloud views using persistent feature histograms. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3384–3391. [Google Scholar] [CrossRef]
- Rusu, R.; Blodow, N.; Beetz, M. Fast Point Feature Histograms (FPFH) for 3D registration. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Jiang, J.; Cheng, J.; Chen, X. Registration for 3-D point cloud using angular-invariant feature. Neurocomputing 2009, 72, 3839–3844. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Zeng, A.; Song, S.; Nießner, M.; Fisher, M.; Xiao, J.; Funkhouser, T. 3dmatch: Learning local geometric descriptors from rgb-d reconstructions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1802–1811. [Google Scholar]
- Gojcic, Z.; Zhou, C.; Wegner, J.D.; Wieser, A. The perfect match: 3d point cloud matching with smoothed densities. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 5545–5554. [Google Scholar]
- Aoki, Y.; Goforth, H.; Srivatsan, R.A.; Lucey, S. Pointnetlk: Robust & efficient point cloud registration using pointnet. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 7163–7172. [Google Scholar]
- Sarode, V.; Li, X.; Goforth, H.; Aoki, Y.; Srivatsan, R.A.; Lucey, S.; Choset, H. Pcrnet: Point cloud registration network using pointnet encoding. arXiv 2019, arXiv:1908.07906. [Google Scholar]
- Zhou, Q.Y.; Park, J.; Koltun, V. Fast global registration. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016; pp. 766–782. [Google Scholar]
- Yang, H.; Shi, J.; Carlone, L. Teaser: Fast and certifiable point cloud registration. IEEE Trans. Robot. 2020. [Google Scholar] [CrossRef]
- Pomerleau, F.; Colas, F.; Siegwart, R.; Magnenat, S. Comparing ICP variants on real-world data sets. Auton. Robot. 2013, 34, 133–148. [Google Scholar] [CrossRef]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-ICP. Robot. Sci. Syst. 2009, 2, 435. [Google Scholar]
- Biber, P.; Straßer, W. The normal distributions transform: A new approach to laser scan matching. Intell. Robots Syst. 2003, 3, 2743–2748. [Google Scholar]
- Merten, H. The Three-Dimensional Normal-Distributions Transform. Threshold 2008, 10, 3. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Padmanabhan, V.; Rhinehart, R.R. A novel termination criterion for optimization. In Proceedings of the 2005, American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 2281–2286. [Google Scholar]
- Zielinski, K.; Laur, R. Stopping criteria for a constrained single-objective particle swarm optimization algorithm. Informatica 2007, 31, 51–59. [Google Scholar]
- Greenhalgh, D.; Marshall, S. Convergence criteria for genetic algorithms. SIAM J. Comput. 2000, 30, 269–282. [Google Scholar] [CrossRef]
- Studniarski, M. Stopping criteria for genetic algorithms with application to multiobjective optimization. In International Conference on Parallel Problem Solving from Nature; Springer: Berlin/Heidelberg, Germany, 2010; pp. 697–706. [Google Scholar]
- Moon, T.K. The expectation-maximization algorithm. IEEE Signal Process. Mag. 1996, 13, 47–60. [Google Scholar] [CrossRef]
- Turk, G. The Stanford Bunny. Available online: http://www.cc.gatech.edu/~turk/bunny/bunny.html (accessed on 17 March 2021).
- Borrmann, D.; Neuchter, A. The Bremen Dataset. Available online: http://kos.informatik.uni-osnabrueck.de/3Dscans/ (accessed on 17 March 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | MSE | Iterations |
|---|---|---|
| Corridor | 0.31 | 14 |
| Office | 0.42 | 19 |
| Linkoping | 0.53 | 8 |
| Bunny | 0.0025 | 19 |
| Bremen | 0.45 | 8 |
| Dataset | MSE | Iterations |
|---|---|---|
| Corridor | 0.66 | 100 |
| Office | 0.48 | 100 |
| Linkoping | 0.50 | 100 |
| Bunny | 0.0024 | 100 |
| Bremen | 0.48 | 100 |
| Sequence | Cost Drop | N. of Iterations | 100 Iterations |
|---|---|---|---|
| box_met | 1.17 | 29.33 | 1.92 |
| hauptgebaude | 0.01 | 31.46 | 0.01 |
| pioneer_slam3 | 0.19 | 24.29 | 0.08 |
| urban05 | 0.36 | 21.81 | 1.13 |
| gazebo_winter | 0.02 | 29.97 | 0.02 |
| planetary_map | 0.59 | 14.82 | 0.42 |
| long_office_household | 0.19 | 23.96 | 0.17 |
| plain | 0.26 | 19.32 | 0.06 |
| pioneer_slam | 0.19 | 27.27 | 0.16 |
| stairs | 0.03 | 24.02 | 0.03 |
| gazebo_summer | 0.06 | 25.11 | 0.04 |
| wood_autumn | 0.02 | 29.34 | 0.02 |
| apartment | 0.07 | 23.04 | 0.06 |
| wood_summer | 0.02 | 30.71 | 0.01 |
| p2at_met | 0.50 | 18.55 | 0.27 |
| total | 0.12 | 18.55 | 0.08 |
| Sequence | 0.75 Quantile (Cost Drop) | 0.95 Quantile (Cost Drop) | 0.75 Quantile (100 Iterations) | 0.95 Quantile (100 Iterations) |
|---|---|---|---|---|
| box_met | 2.26 | 3.95 | 3.36 | 5.02 |
| hauptgebaude | 0.03 | 0.72 | 0.02 | 0.78 |
| pioneer_slam3 | 0.38 | 0.77 | 0.18 | 0.78 |
| urban05 | 0.50 | 2.12 | 1.77 | 3.33 |
| gazebo_winter | 0.03 | 0.23 | 0.03 | 0.05 |
| planetary_map | 1.16 | 2.18 | 0.83 | 1.81 |
| long_office_household | 0.66 | 2.00 | 0.62 | 2.07 |
| plain | 0.50 | 0.94 | 0.20 | 1.00 |
| pioneer_slam | 0.43 | 3.54 | 0.45 | 4.68 |
| stairs | 0.09 | 0.24 | 0.09 | 0.24 |
| gazebo_summer | 0.20 | 0.65 | 0.13 | 1.02 |
| wood_autumn | 0.03 | 0.27 | 0.03 | 0.04 |
| apartment | 0.29 | 1.30 | 0.27 | 2.02 |
| wood_summer | 0.02 | 0.27 | 0.02 | 0.03 |
| p2at_met | 1.04 | 2.00 | 0.84 | 2.29 |
| total | 0.44 | 1.79 | 0.47 | 2.38 |
| Sequence | Median | 0.75 Quantile | 0.95 Quantile | Iterations |
|---|---|---|---|---|
| box_met | 1.28 | 2.49 | 4.27 | 39.40 |
| hauptgebaude | 0.01 | 0.02 | 0.77 | 42.35 |
| pioneer_slam3 | 0.15 | 0.34 | 0.75 | 36.34 |
| urban05 | 0.44 | 0.65 | 4.31 | 39.65 |
| gazebo_winter | 0.02 | 0.03 | 0.05 | 41.09 |
| planetary_map | 0.54 | 1.08 | 2.07 | 24.89 |
| long_office_household | 0.17 | 0.63 | 1.99 | 35.20 |
| plain | 0.17 | 0.46 | 0.93 | 31.78 |
| pioneer_slam | 0.18 | 0.44 | 3.64 | 38.13 |
| stairs | 0.03 | 0.09 | 0.23 | 34.08 |
| gazebo_summer | 0.05 | 0.19 | 0.74 | 35.96 |
| wood_autumn | 0.02 | 0.03 | 0.06 | 40.41 |
| apartment | 0.06 | 0.28 | 1.50 | 33.36 |
| wood_summer | 0.01 | 0.02 | 0.03 | 42.44 |
| p2at_met | 0.47 | 0.97 | 1.96 | 29.75 |
| total | 0.10 | 0.45 | 1.86 | 29.75 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fontana, S.; Sorrenti, D.G. A Termination Criterion for Probabilistic Point Clouds Registration. Signals 2021, 2, 159-173. https://doi.org/10.3390/signals2020013
Fontana S, Sorrenti DG. A Termination Criterion for Probabilistic Point Clouds Registration. Signals. 2021; 2(2):159-173. https://doi.org/10.3390/signals2020013
Chicago/Turabian StyleFontana, Simone, and Domenico Giorgio Sorrenti. 2021. "A Termination Criterion for Probabilistic Point Clouds Registration" Signals 2, no. 2: 159-173. https://doi.org/10.3390/signals2020013