A problem shared by most drivers in cities is the time spent looking for a parking spot. Apart from the owners, tenants or beneficiaries of a parking space, this wastes everyone’s time and has even a deleterious effect on the society. Indeed, cruising is not only bothersome but in addition the riding time generates a series of cascading externalities: (i) economic damages (turnover loss for retailers located in critical areas, time subtracted to work, higher fuel consumption, delays, etc.); (ii) pollution increase (3 to 15 extra min per trip per car of useless emissions); (iii) traffic congestion (30% of congestion generated by cruising in San Francisco) and consequent reduced efficiency of public transport systems; (iv) negative impact on the well-being of the driver (time invested in parking instead of meaningful or productive activities, stress accumulation and more time sit); and (v) negative impact on the well-being of any citizen (emission and sound pollution levels, traffic, and pedestrian safety).
In European big cities, cruising time generates an average 30% additional traffic [
1]. For smaller cities the rate is 5–10%. Overall, 70 million hours are lost per year, which represents an economic loss of 600 M€ per year [
2]. In New York City, the hardest-hit U.S. urban area, drivers on average waste 107 h a year, with 2.243
$ in wasted time, fuel, and emissions per driver, plus 4.3 billion
$ in costs to the Big Apple [
3]. Cars individual use will not disappear any time soon: actually global car sales are rising. With 68% of the human population living in urban areas by 2050 (United Nations estimate), we need to act urgently to reduce the impact of mass car circulation on society and the environment, with solutions implementable in the span of a few months, cost-effective and with no need of specific infrastructural interventions.
In the general context of the smart city, the previous issue makes sense as mobility was identified by Guedes et al. [
4], along with 7 out of 20 others, as having the “highest priority for the development of smarter and more sustainable cities”. More specifically, Munhoz et al. [
5] carried out a broad study on the main factors favouring intelligent urban mobility; among these, the authors highlighted “cooperation between stakeholders”, “technological innovation” and “smart parking”, all characteristics that fit well to the ReadyPark solution presented in this paper.
1.1. Parking Spots Supply & Demand
If we follow the supply/demand metaphor, the resources here are the parking spots. A giver is a driver whose vehicle is parked and will eventually leave from the parking space to “give” his/her spot, and a taker is a driver who is driving on the streets and will eventually look for a parking space to “take” the spot. Each driver is alternately producer (i.e., giver) and consumer (i.e., taker) of resources. We are therefore in a producer–consumer schema and the problem is to balance at any time supply and demand. The difficulty to match supply and demand is that (i) the numbers of takers and givers may markedly differ and may even vary over time and that (ii) the driving time and the parking time are in most cases independent.
In order to balance supply with demand, and so to favour swaps, it is necessary that the two frequencies of occurrence, search for a spot by a taker and disposal of his spot by a giver, are close, that is the Supply/Demand ratio (hereinafter
) (Equation (
1)) is close to 1.
where
parking_time is the time during which a vehicle is parked and
driving_time is the time between two consecutive parking of a vehicle.
Of course, in all generality, there may be an imbalance between supply and demand but the problem addressed here is the lack of available parking spaces for the number of drivers looking for a spot, that is, when demand exceeds supply, i.e., .
For there to be an exchange of places between a taker and a giver, there must be a space-time coincidence; that is, the two drivers must be in the same area at the same time. It is worth noting that this statement makes sense only in situations without intelligent parking allocation. Time coincidence depends both on the density of vehicles in the city and the number of parking spots. Without intelligent parking allocation, spatial coincidence requires the taker and the giver to be very close to each other, and perhaps even the former on the street and the latter in the adjacent parking spot. In order to relax this last constraint, we propose the ReadyPark solution based on a collaborative parking search strategy.
1.2. Previous Works
The field of smart cities has experienced strong growth in recent years [
6]. In this context, one of the most significant issues addressed relates to the management of urban transports [
7,
8]. The challenges addressed in this area are traditionally classified according to three axes:
Parking spaces,
Traffic information, and
Trajectories. The common point of all these works is the need for efficient data sensors to improve the quality of services. This has been pointed out by Illari et al. [
9] who compared traditional
wireless sensor networks, for which sensors are statically deployed on the ground to
collaborative sensing, assuming mobile crowdsensing devices or participatory sensing, to highlight how the collaborative dimension provides key benefits in urban transportation.
In this paper, we focus on the problem of
parking space management that is an important challenge in big cities for reducing the traffic, limiting vehicle energy consumption and decreasing greenhouse gas emissions [
10]. As shown in an article published in 2016 [
11], this problematic is a major issue in urban management, since Aliedani et al. studied the impact of searching for parking spaces and shown that approximately 730 tons of carbon dioxide (CO
2), 95,000 h of time and 47,000 gallons of fuel are used per year in finding of parking in Los Angeles (USA). Such impacts had already been observed in a 2006 study [
12].
Thus, numerous work have been proposed for intelligent management of parking spaces [
13]. Pioneering works in the field have exploited hardware sensors that were able to capture raw data directly from the environment. The best-known projects concern sensor networks located on sidewalks [
14], fixed or mobile cameras [
15,
16] capturing parking spaces or ultra-sonic sensors on parking lots [
10]. The information captured is sent to a central server which has got an overall information on free parking spaces.
With the development of the IoT (Internet of Things), some approaches have proposed IoT-based architecture to address the parking space problem. For instance, Lanza et al. [
17] propose an IoT platform able to provide real-time data about available parking places both indoor and outdoor. The available parking spots can then be visualised on a mobile app.
More recent works have addressed this issue as a complex system [
18] in which agents interact to facilitate the management of parking spaces. The very strong potential of collaborative approaches to address parking space problem had already been highlighted in [
9], where the authors showed how
“collaborative sensing can provide key benefits in urban transportation, contributing to higher travel efficiency, safety, and reduced pollution, through innovative applications that benefit from the data sensed collaboratively”. For instance, Higuchi et al. [
19] present a collaborative approach, called
Co-Park, in which a group of connected vehicles communicate, forming a
vehicular micro cloud cluster, in order to find available parking spots in a timely fashion. The approach was evaluated with a simulation that highlighted the reduction of the trip time for participating vehicles against non-participating vehicles.
On the principle of the collaborative model,
GaParking [
20] proposes an approach to share private residential parking spaces between residents and public users. In this approach, parking spot owners are supposed to register their vacant parking space in the model which can be reserved by a driver. By using numerical experiments, the authors show how the proposed sharing parking strategy makes use of private resources to benefit the community. Popular applications based on this principle are now available such as
JustPark [
13] or
MobyPark [
21].
While these approaches are popular, they nevertheless assume that available parking spaces and their duration are known in advance. However, in most cases, drivers turn in the streets searching for a free parking space. To allow a more dynamic management of parking spaces between those who leave a parking space and who are looking for one, some studies have adopted a multi-agents based models to simulate various kinds of driver collaborative behaviours. For instance, Chalamish et al. [
22] use a multi-agent based model to simulate different parking search strategies. This approach has thus allowed to highlight the evolution of the average search time according to the search strategy adopted.
Other works have attempted to take into account requirements on some parking attributes. Di Napoli et al. [
23] use a multi-agent system to address the parking space allocation as the result of an agreement between parking providers and parking requestors. The approach takes into account user requirements on a parking space in terms of its location and cost, and the vendor requirements in terms of income and city regulations to obtain an efficient parking allocation and traffic redirection.
1.3. ReadyPark Collaborative Parking Search Strategy
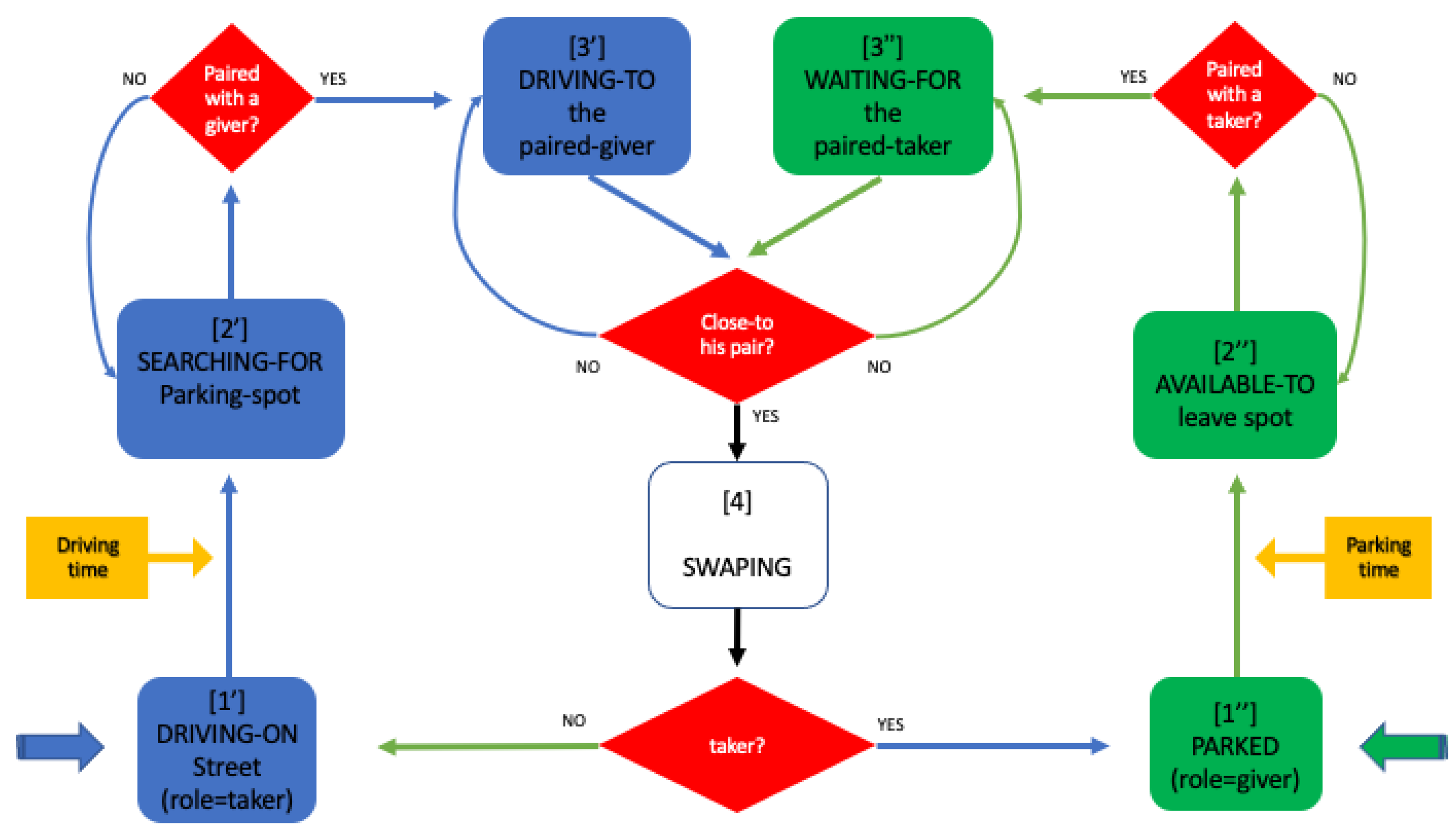
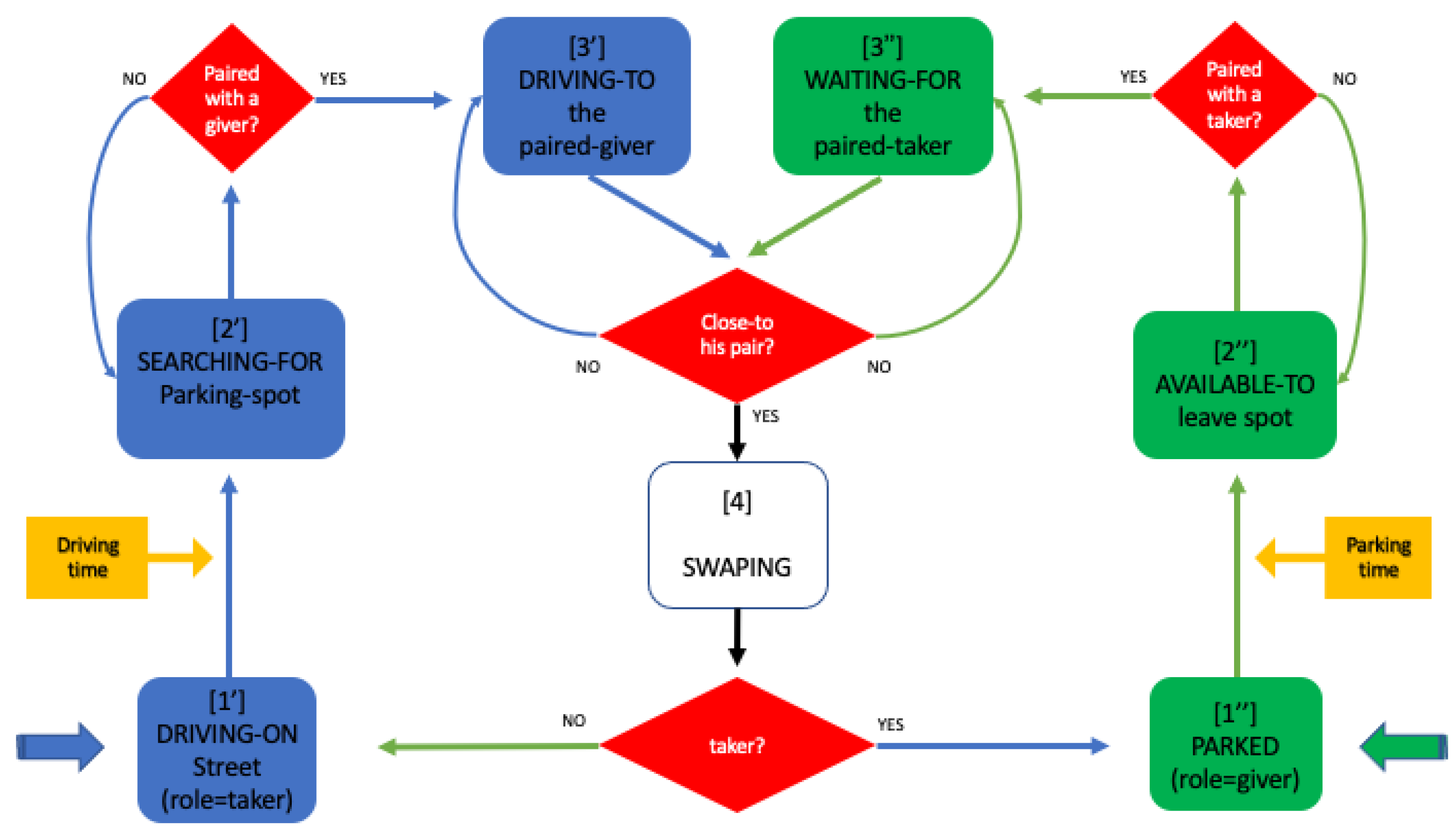
ReadyPark is an urban parking assistance service which facilitates in real-time the search for a parking spot. It is based on a collaborative principle, enabling users peer-to-peer swaps of on-street parking spots.
With ReadyPark, the key point is that a strict spatial coincidence is not required to swap spots. More concretely, a swap is based on pairing one giver with one taker: when a giver is available-to-leave-spot, a taker searching-for-spot is selected by ReadyPark on the basis of relevant criteria such as proximity to the giver, car attributes, sharing activity level, but also specific characteristics of the taker, such as people with disabilities, medical profession, home care workers, etc., and then is guided to the spot via a turn-by-turn navigation solution provided by a mobile application. In the end, the giver is gratified if he waited to swap with the selected taker, for instance, by increasing his “sharing indicator”.
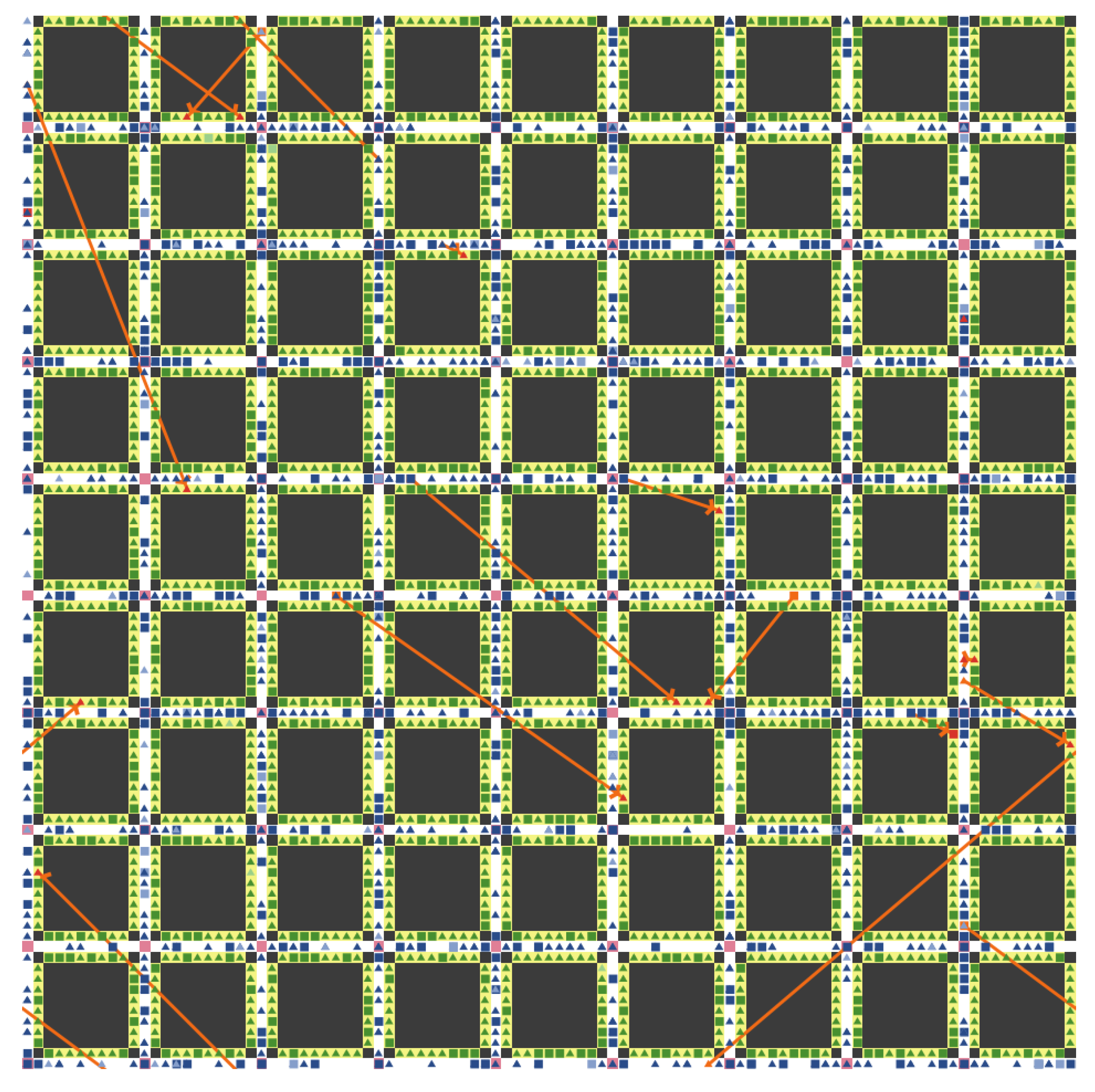
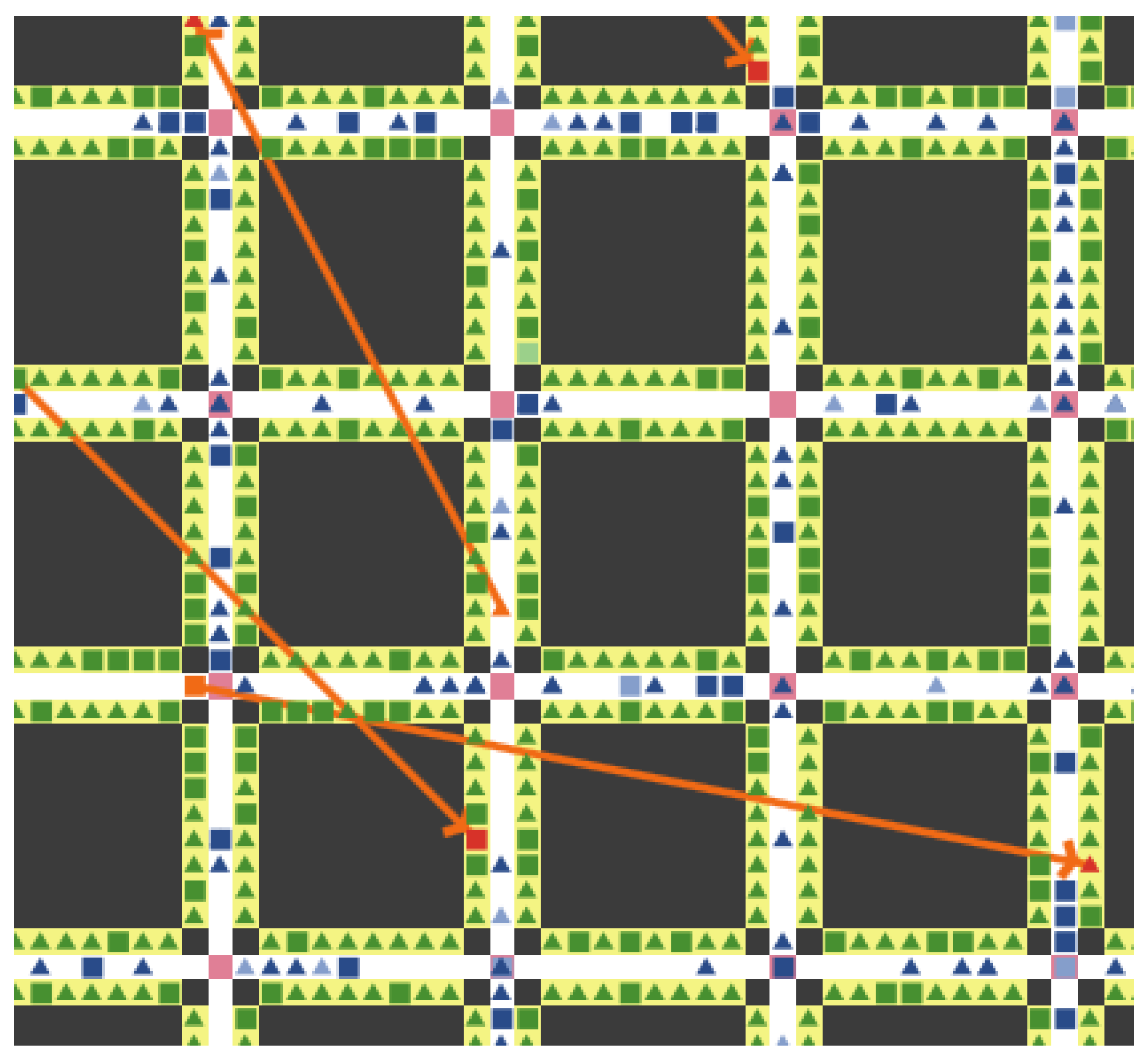
At this point, one might think that the ReadyPark strategy leads a giver to wait for a long time for the arrival of the taker and thus lower the availability of places. This statement calls for two remarks: (i) the simulations, especially those on the minimal model (
Section 3.2), show that the waiting time is in fact very short compared to the parking time and driving time; (ii) the exchanges are in a collaborative mode in which the givers will in turn be takers, and vice versa, so it can be assumed that everyone will behave altruistically by agreeing to “lose a few seconds now to get a parking spot more quickly later”; nevertheless, in real operational situations, the acceptability of waiting will naturally be regulated as givers will not wait beyond a reasonable time.
To sum up, ReadyPark proposes a collaborative parking spot search strategy. The objective of the paper is to study its dynamics and its impact through agent-based modelling and simulations in order to refine the implementation of future operational versions. The present study is the result of a joint effort between an IT company, founded by two engineers, and a public research laboratory specialised in agent-based modelling and complex systems. The company developed a proof-of-concept in the form of a digital collaborative service based on a mobile application using Galileo technology (The Europe’s Global Satellite Navigation System (
https://www.euspa.europa.eu/european-space/galileo/What-Galileo, accessed on 26 June 2021)) and a collaborative platform (web services) to implement the parking spot search strategy. This POC has won a European competition organised by the European Space Agency at the end of 2019 and is deployed in South-East France.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}