

Seamless Function-Oriented Mechanical System Architectures and Models
 , , , ,
, , , ,
Abstract
:1. Introduction
- Based on a function-oriented system architecture.
- Linking domain models for function validation.
- The formalized modeling of physical contacts.
- The formalized modeling of physical structures.
- The formalized modeling of relations between physical contacts and structures.
2. State of the Art
2.1. Analyzed Criterion: Based on a Function-Oriented System Architecture
- Usage of functional flows is not specified [34].
2.2. Analyzed Criterion: Linking Domain Models of Product Development for Function Validation
2.3. Analyzed Criterion: Formalized Modeling of Physical Contacts
- Description of single active surfaces and the energy flows between them [37].
2.4. Analyzed Criterion: Formalized Modeling of Physical Structures
2.5. Analyzed Criterion: Formalized Modeling of Relations between Physical Contacts and Structures
- FAS4M uses the SysML dependency trace to model the dependencies between the contacts with their active surface set and structures [35].
- The other listed state-of-the-art approaches link individual active surfaces to structures, either as the parts or as ports of structures. Of these, the C&C2-A [50,51,52,54] is to be pointed out, because linking active surfaces with structures via ports seems to build a suitable basis, since the ports can be linked to active surfaces within the contact elements, as, for instance, the SolutionElement of the motego method, according to [5]. However, the C&C2-A does not allow a parametric description of contacts, as the contacts are not specifically modeled, but realized through connectors between two active surfaces.
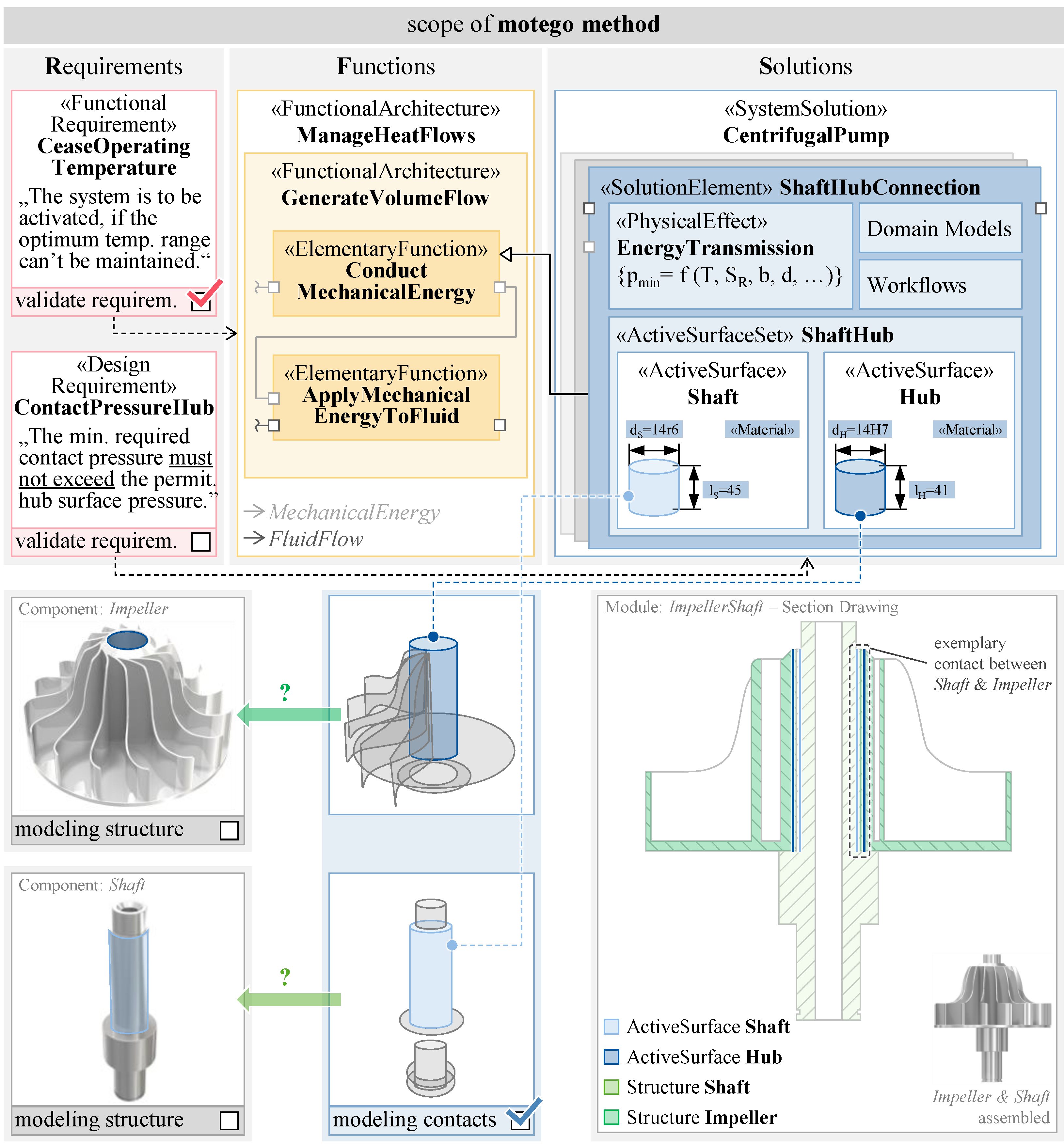
3. The motego Method
4. Research Need
- How can structures be defined so that they can be assigned to functions?
- How can domain models be integrated to enable the design and validation of structures according to the requirements?
- How can the defined structures be arranged at the product layer to synchronize them with data management systems?
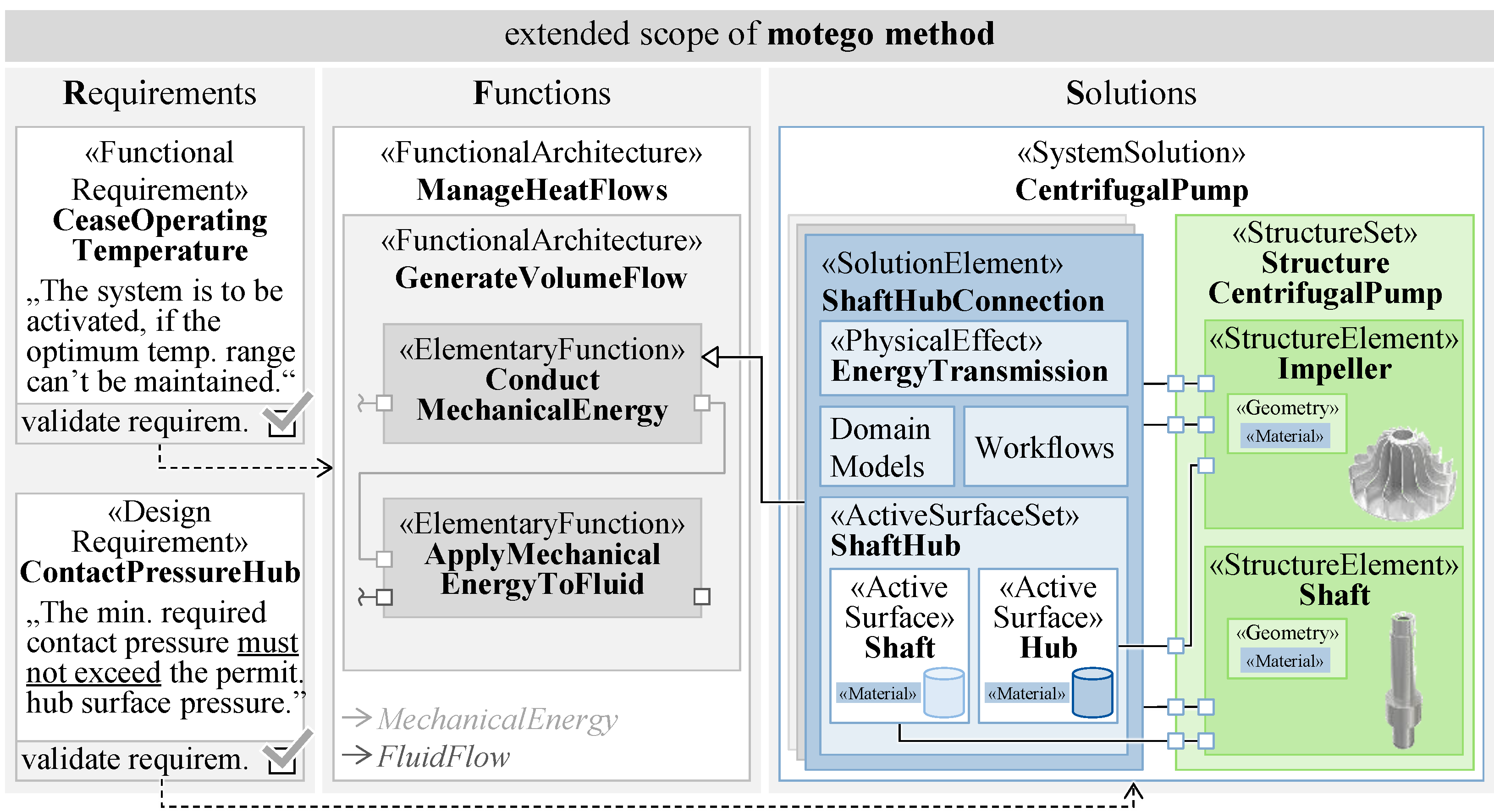
5. Function-Oriented Modeling of Mechanical System Architectures
5.1. Definition of Structure Elements Based on Function-Oriented Contacts
5.1.1. Metamodel for Modeling Structure Elements
5.1.2. Exemplary Application of the Structure Element Metamodel
5.2. Integration of Domain Models into Structure Elements
5.2.1. Exemplary Application of the Spütz et al. Metamodel
5.2.2. Exemplary Application of the Domain Model Metamodel
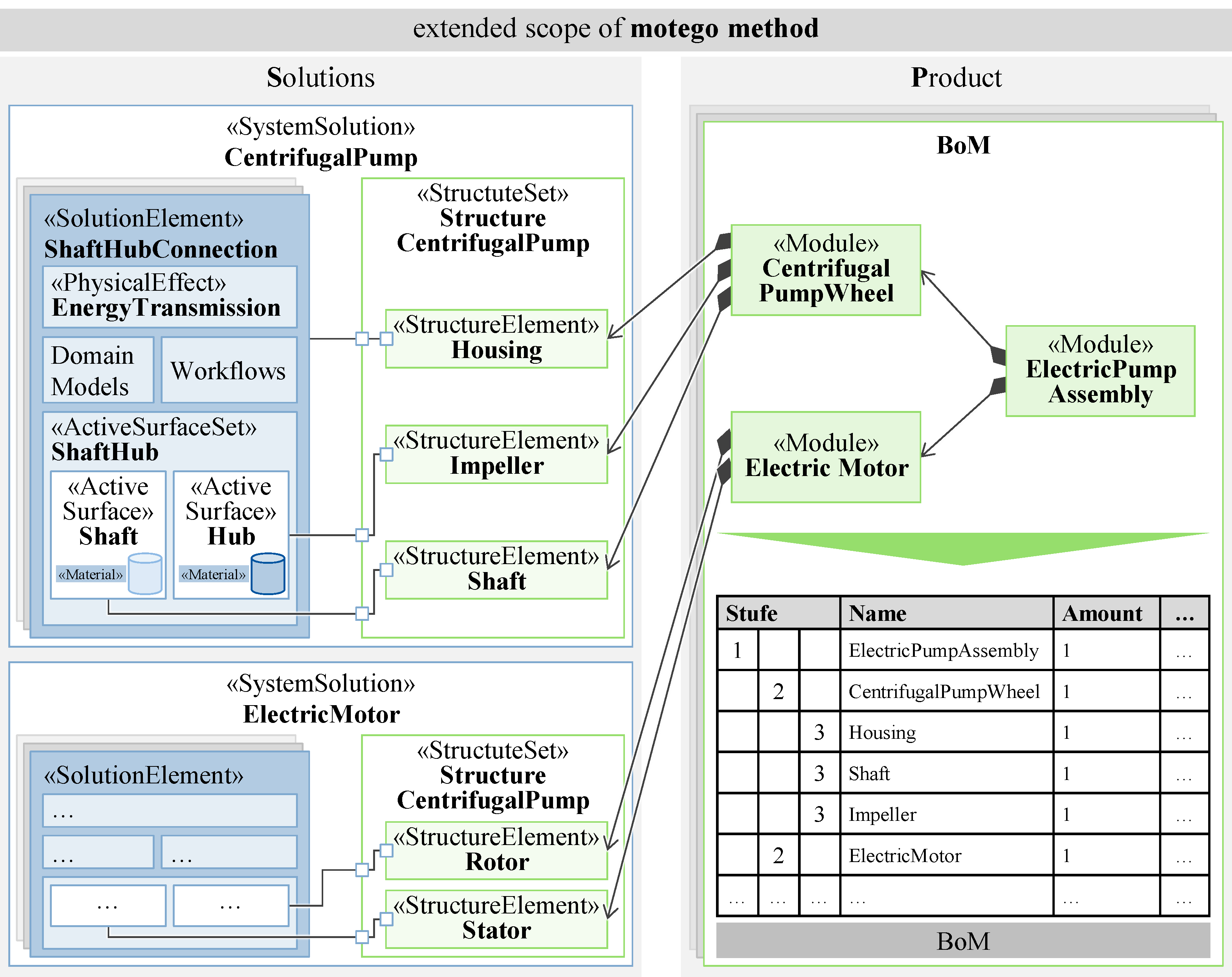
5.3. Arranging Structure Elements at the Product Layer
6. Discussion
7. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Alur, R. Principles of Cyber-Physical Systems; The MIT Press: Cambridge, MA, USA; London, UK, 2015; ISBN 0262328453. [Google Scholar]
- Eigner, M.; Gilz, T.; Zafirov, R. Proposal for functional product description as part of a PLM solution in interdisciplinary product development. In DS 70: Proceedings of DESIGN 2012, the 12th International Design Conference, Dubrovnik, Croatia; The Design Society: Zagreb, Croatia, 2012. [Google Scholar]
- Eigner, M.; Roubanov, D.; Zafirov, R. Modellbasierte Virtuelle Produktentwicklung; Springer Vieweg: Berlin/Heidelberg, Germany, 2014; ISBN 978-3-662-43815-2. [Google Scholar]
- Graessler, I.; Hentze, J. The new V-Model of VDI 2206 and its validation. Automatisierungstechnik 2020, 68, 312–324. [Google Scholar] [CrossRef]
- Jacobs, G.; Konrad, C.; Berroth, J.; Zerwas, T.; Höpfner, G.; Spütz, K. Function-Oriented Model-Based Product Development. In Design Methodology for Future Products: Data Driven, Agile and Flexible; Krause, D., Heyden, E., Eds.; Springer: Cham, Switzerland, 2021; pp. 243–263. ISBN 978-3-030-78367-9. [Google Scholar]
- Bradley, D.; Russell, D.; Ferguson, I.; Isaacs, J.; MacLeod, A.; White, R. The Internet of Things—The future or the end of mechatronics. Mechatronics 2015, 27, 57–74. [Google Scholar] [CrossRef]
- Masior, J.; Schneider, B.; Kürümlüoglu, M.; Riedel, O. Beyond Model-Based Systems Engineering towards Managing Complexity. Procedia CIRP 2020, 91, 325–329. [Google Scholar] [CrossRef]
- Dumitrescu, R.; Albers, A.; Riedel, O.; Stark, R.; Gausemeier, J. Engineering in Deutschland-Status quo in Wirtschaft und Wissenschaft: Ein Beitrag zum Advanced Systems Engineering; Fraunhofer IEM: Paderborn, Germany, 2021; pp. 88–92. [Google Scholar]
- Kienbaum Consultants International GmbH; Verein Deutscher Maschinen- und Anlagenbau. Future Skills im Maschinen- und Anlagenbau: Eine Analyse entlang des Produktlebenszyklus. Available online: https://www.vdma.org/documents/34570/51415166/VDMA_Kienbaum_Studie.pdf/8208b5c2-eec7-3a9a-09e9-cc2c59ff3c27?t=1651134100696 (accessed on 10 December 2023).
- VDI Verein Deutscher Ingenieure, e.V. Entwicklung Technischer Produkte und Systeme Modell der Produktentwicklung; Beuth Verlag GmbH: Berlin, Germany, 2019; VDI 2221 Blatt 1. [Google Scholar]
- Drave, I.; Rumpe, B.; Wortmann, A.; Berroth, J.; Hoepfner, G.; Jacobs, G.; Spuetz, K.; Zerwas, T.; Guist, C.; Kohl, J. Modeling mechanical functional architectures in SysML. In Proceedings of the 23rd ACM/IEEE International Conference on Model Driven Engineering Languages and Systems. MODELS ‘20: ACM/IEEE 23rd International Conference on Model Driven Engineering Languages and Systems, Virtual Event Canada, 16 October 2020–23 October 2020; Syriani, E., Sahraoui, H., Eds.; ACM: New York, NY, USA, 2020; pp. 79–89, ISBN 9781450370196. [Google Scholar]
- Koller, R. Konstruktionslehre für den Maschinenbau: Grundlagen zur Neu-und Weiterentwicklung Technischer Produkte mit Beispielen; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Koller, R.; Kastrup, N. Prinziplösungen zur Konstruktion Technischer Produkte; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Pahl, G.; Beitz, W.; Feldhusen, J.; Grote, K.-H. Engineering Design: A Systematic Approach, 3rd ed.; Springer: London, UK, 2007; ISBN 978-1-84628-318-5. [Google Scholar]
- International Council on Systems Engineering. Systems Engineering Vision 2035: Engineering solutions for a better world. Commun Eng 2022, 1, 7. [Google Scholar] [CrossRef]
- Huldt, T.; Stenius, I. State-of-practice survey of model-based systems engineering. Syst. Eng. 2019, 22, 134–145. [Google Scholar] [CrossRef]
- Borchani, M.F.; Ammar, R.; Hammadi, M.; Choley, J.-Y.; Yahia, N.B.; Barkallah, M.; Louati, J. Mechatronic System Design using Model-Based Systems Engineering and Set-Based Concurrent Engineering Principles. In Proceedings of the 12th France-Japan and 10th Europe-Asia Congress on Mechatronics, Tsu, Japan, 10–12 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 32–38, ISBN 978-1-5386-2982-6. [Google Scholar]
- Morkevicius, A.; Aleksandraviciene, A.; Mazeika, D.; Bisikirskiene, L.; Strolia, Z. MBSE Grid: A Simplified SysML-Based Approach for Modeling Complex Systems. INCOSE Int. Symp. 2017, 27, 136–150. [Google Scholar] [CrossRef]
- Qamar, A.; Törngren, M.; Wikander, J.; During, C. Integrating multi-domain models for the design and development of mechatronic systems. In Proceedings of the 7th European Systems Engineering Conference EuSEC 2010, Stockholm, Sweden, 23–26 May 2010. [Google Scholar]
- Vazquez-Santacruz, J.A.; Portillo-Velez, R.; Torres-Figueroa, J.; Marin-Urias, L.F.; Portilla-Flores, E. Towards an integrated design methodology for mechatronic systems. Res Eng Des. 2023, 34, 497–512. [Google Scholar] [CrossRef]
- Vazquez-Santacruz, J.A.; Torres-Figueroa, J.; Portillo-Velez, R.d.J. Design of a human-like biped locomotion system based on a novel mechatronic methodology. Concurr. Eng. 2019, 27, 249–267. [Google Scholar] [CrossRef]
- Di Maio, M.; Weilkiens, T.; Hussein, O.; Aboushama, M.; Javid, I.; Beyerlein, S.; Grotsch, M. Evaluating MBSE Methodologies Using the FEMMP Framework. In Proceedings of the IEEE International Symposium on Systems Engineering (ISSE), Vienna, Austria, 13 September–13 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–8, ISBN 978-1-6654-3168-2. [Google Scholar]
- Malmiry, R.B.; Dantan, J.-Y.; Pailhès, J.; Antoine, J.-F. A product functional modelling approach based on the energy flow by using characteristics-properties modelling. J. Eng. Des. 2016, 27, 817–843. [Google Scholar] [CrossRef]
- Berges, J.M.; Spütz, K.; Jacobs, G.; Kowalski, J.; Zerwas, T.; Berroth, J.; Konrad, C. Automated Identification of Valid Model Networks Using Model-Based Systems Engineering. Systems 2022, 10, 250. [Google Scholar] [CrossRef]
- Spütz, K.; Berges, J.; Jacobs, G.; Berroth, J.; Konrad, C. Classification of Simulation Models for the Model-based Design of Plastic-Metal Hybrid Joints. Procedia CIRP 2022, 109, 37–42. [Google Scholar] [CrossRef]
- Zerwas, T.; Jacobs, G.; Kowalski, J.; Husung, S.; Gerhard, D.; Rumpe, B.; Zeman, K.; Vafaei, S.; König, F.; Höpfner, G. Model Signatures for the Integration of Simulation Models into System Models. Systems 2022, 10, 199. [Google Scholar] [CrossRef]
- International Council on Systems Engineering. Systems Engineering Vision 2020: INCOSE-TP-2004-004-02; International Council on Systems Engineering: Seattle, WA, USA, 2007. [Google Scholar]
- Albers, A.; Scherer, H.; Bursac, N.; Rachenkova, G. Model Based Systems Engineering in Construction Kit Development—Two Case Studies. Procedia CIRP 2015, 36, 129–134. [Google Scholar] [CrossRef]
- Alt, O. Modellbasierte Systementwicklung mit SysML; Carl Hanser Fachbuchverlag: München, Germany, 2012; ISBN 9783446431270. [Google Scholar]
- Konrad, C.; Jacobs, G.; Rasor, R.; Riedel, R.; Katzwinkel, T.; Siebrecht, J. Enabling complexity management through merging business process modeling with MBSE. Procedia CIRP 2019, 84, 451–456. [Google Scholar] [CrossRef]
- Li, Z.; Wang, G.; Lu, J.; Broo, D.G.; Kiritsis, D.; Yan, Y. Bibliometric Analysis of Model-Based Systems Engineering: Past, Current, and Future. IEEE Trans. Eng. Manage. 2024, 71, 2475–2492. [Google Scholar] [CrossRef]
- Object Management Group. OMG Systems Modeling Language (OMG SysML™): Version 1.6. Available online: https://www.omg.org/spec/SysML/1.6/ (accessed on 10 December 2023).
- Henderson, K.; Salado, A. Value and benefits of model-based systems engineering (MBSE): Evidence from the literature. Syst. Eng. 2021, 24, 51–66. [Google Scholar] [CrossRef]
- Elwert, M.; Ramsaier, M.; Eisenbart, B.; Stetter, R.; Till, M.; Rudolph, S. Digital Function Modeling in Graph-Based Design Languages. Appl. Sci. 2022, 12, 5301. [Google Scholar] [CrossRef]
- Moeser, G.; Kramer, C.; Grundel, M.; Neubert, M.; Kümpel, S.; Scheithauer, A.; Kleiner, S.; Albers, A. Fortschrittsbericht zur modellbasierten Unterstützung der Konstrukteurstätigkeit durch FAS4M. In Tag des Systems Engineering: Ulm, 11–13. November 2015; Schulze, S.-O., Muggeo, C., Eds.; Hanser: München, Germany, 2016; pp. 69–78. ISBN 978-3-446-44729-5. [Google Scholar]
- Eigner, M.; Koch, W.; Muggeo, C. Modellbasierter Entwicklungsprozess Cybertronischer Systeme: Der PLM-Unterstützte Referenzentwicklungsprozess für Produkte und Produktionssysteme; Springer Vieweg: Berlin/Heidelberg, Germany, 2017; ISBN 978-3-662-55123-3. [Google Scholar]
- Wölkl, S.; Shea, K. A Computational Product Model for Conceptual Design Using SysML. In Proceedings of the Volume 2: 29th Computers and Information in Engineering Conference, Parts A and B. ASME 2009 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, San Diego, CA, USA, 30 August–2 September 2009; ASMEDC, 08302009. pp. 635–645, ISBN 978-0-7918-4899-9. [Google Scholar]
- Aleksandravičienė, A.; Morkevičius, A. MagicGrid® BOOK OF KNOWLEDGE: A Practical Guide to Systems Modeling Using MagicGrid from Dassault Systèmes, 2nd ed.; Dassault Systèmes: Vélizy-Villacoublay, France, 2021; ISBN 978-609-454-554-2. [Google Scholar]
- Karban, R.; Crawford, A.; Trancho, G.; Zamparelli, M.; Herzig, S.; Gomes, I.; Brower, E.; Piette, M. The OpenSE Cookbook: A practical, recipe based collection of patterns, procedures, and best practices for executable systems engineering for the Thirty Meter Telescope. In Proceedings of the Modeling, Systems Engineering, and Project Management for Astronomy VIII, Austin, TX, USA, 10 June 2018–15 June 2018; Angeli, G.Z., Dierickx, P., Eds.; SPIE: Bellingham, WA, USA, 2018; p. 31, ISBN 9781510619630. [Google Scholar]
- Weilkiens, T. SYSMOD—The Systems Modeling Toolbox: Pragmatic MBSE with SysML, 2nd ed.; Version 4.1; MBSE4U: Fredesdorf, Germany, 2016; ISBN 9783981787580. [Google Scholar]
- Nigischer, C.; Bougain, S.; Riegler, R.; Stanek, H.P.; Grafinger, M. Multi-domain simulation utilizing SysML: State of the art and future perspectives. Procedia CIRP 2021, 100, 319–324. [Google Scholar] [CrossRef]
- Nikolaidou, M.; Kapos, G.-D.; Tsadimas, A.; Dalakas, V.; Anagnostopoulos, D. Challenges in SysML model simulation. Adv. Comput. Sci. Int. J. 2016, 5, 49–56. [Google Scholar]
- Reilley, K.A.; Edwards, S.; Peak, R.; Mavris, D. Methodologies for Modeling and Simulation in Model-Based Systems Engineering Tools. In Proceedings of the AIAA SPACE 2016, Long Beach, CA, USA, 13–16 September 2016; American Institute of Aeronautics and Astronautics: Reston, Virginia, 2016. ISBN 978-1-62410-427-5. [Google Scholar]
- Cao, Y.; Liu, Y.; Fan, H.; Fan, B. SysML-based uniform behavior modeling and automated mapping of design and simulation model for complex mechatronics. Comput. Aided Des. 2013, 45, 764–776. [Google Scholar] [CrossRef]
- Kim, H.; Fried, D.; Menegay, P.; Soremekun, G.; Oster, C. Application of Integrated Modeling and Analysis to Development of Complex Systems. Procedia Comput. Sci. 2013, 16, 98–107. [Google Scholar] [CrossRef]
- Gausemeier, J.; Dorociak, R.; Pook, S.; Nyßen, A.; Terfloth, A. Computer-aided cross-domain modeling of mechatronic systems. In DS 60: Proceedings of DESIGN 2010, the 11th International Design Conference, Dubrovnik, Croatia; International Council on Systems Engineering: Seattle, WA, USA, 2010; pp. 723–732. [Google Scholar]
- Böhm, W. Model-Based Engineering of Collaborative Embedded Systems: Extensions of the SPES Methodology; Springer International Publishing AG: Cham, Switzerland, 2021; ISBN 978-3-030-62135-3. [Google Scholar]
- Long, D.A.; Scott, Z.B. A Primer for Model-Based Systems Engineering, 2nd ed.; Vitech: Blacksburg, Virginia, 2011; ISBN 9781105588105. [Google Scholar]
- Pohl, K.; Hönninger, H.; Achatz, R.; Broy, M. Model-Based Engineering of Embedded Systems: The SPES 2020 Methodology; Springer: Berlin/Heidelberg, Germany, 2012; ISBN 978-3-642-34613-2. [Google Scholar]
- Albers, A.; Christian, Z. Interdisciplinary Systems Modeling Using the Contact & Channel-model for SysML. In Proceedings of the DS 68-9: Proceedings of the 18th International Conference on Engineering Design (ICED 11), Impacting Society through Engineering Design, Vol. 9: Design Methods and Tools pt. 1, Lyngby/Copenhagen, Denmark, 15–19 August 2011. [Google Scholar]
- Albert, A.; Christian, Z. Extending SysML for Engineering Designers by Integration of the Contact & Channel—Approach (C&C2-A) for Function-Based Modeling of Technical Systems. Procedia Comput. Sci. 2013, 16, 353–362. [Google Scholar] [CrossRef]
- Zingel, C.; Albers, A.; Matthiesen, S.; Maletz, M. Experiences and Advancements from One Year of Explorative Application of an Integrated Model-Based Development Technique Using C&C2-A in SysML. IAENG Int. J. Comput. Sci. 2012, 39, 165–181. [Google Scholar]
- Moeser, G.; Albers, A.; Kumpel, S. Usage of free sketches in MBSE raising the applicability of Model-Based Systems Engineering for mechanical engineers. In Proceedings of the 2015 IEEE International Symposium on Systems Engineering (ISSE), Rome, Italy, 28–30 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 50–55, ISBN 978-1-4799-1920-8. [Google Scholar]
- Grauberger, P.; Wessels, H.; Gladysz, B.; Bursac, N.; Matthiesen, S.; Albers, A. The contact and channel approach—20 years of application experience in product engineering. J. Eng. Des. 2020, 31, 241–265. [Google Scholar] [CrossRef]
- Jagla, P.; Jacobs, G.; Spütz, K.; Berroth, J. Classification of function-oriented solution elements for MBSE. Forsch Ingenieurwes 2023, 87, 469–477. [Google Scholar] [CrossRef]
- Spütz, K.; Jacobs, G.; Zerwas, T.; Konrad, C. Modeling language for the function-oriented development of mechatronic systems with motego. Forsch Ingenieurwes 2023, 87, 387–398. [Google Scholar] [CrossRef]
- Berges, J.M.; Spütz, K.; Zhang, Y.; Höpfner, G.; Berroth, J.; Konrad, C.; Jacobs, G. Reusable workflows for virtual testing of multidisciplinary products in system models. Forsch Ingenieurwes 2023, 87, 339–351. [Google Scholar] [CrossRef]
- Matthiesen, S. Ein Beitrag zur Basisdefinition des Elementmodells “Wirkflächenpaare & Leitstützstrukturen” zum Zusammenhang von Funktion und Gestalt technischer Systeme. 2002. Available online: https://d-nb.info/1005205671/34 (accessed on 10 December 2023).
- Wittel, H.; Spura, C.; Jannasch, D. Roloff/Matek Maschinenelemente, 25. Auflage; Springer: Wiesbaden, Germany, 2021; ISBN 978-3-658-34159-6. [Google Scholar]
- Bender, B.; Gericke, K. Pahl/Beitz Konstruktionslehre; Springer: Berlin/Heidelberg, Germany, 2021; ISBN 978-3-662-57302-0. [Google Scholar]
- Kernschmidt, K.; Feldmann, S.; Vogel-Heuser, B. A model-based framework for increasing the interdisciplinary design of mechatronic production systems. J. Eng. Des. 2018, 29, 617–643. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Analyzed Criteria | ||||||
|---|---|---|---|---|---|---|
| Approach | References | Based on a Function-Oriented System Architecture | Linking to Domain Models of Product Dev. for Function Validation | Formalized Modeling of Physical Contacts | Formalized Modeling of Physical Structures | Formalized Modeling of Relations btw. Physical Contacts and Structures |
| Functional Product Description/mecpro2 | [2,36] | ◑ | − | − | ● | − |
| motego | [5] | ● | ● | ● | − | − |
| Digital Function Modeling in DC43 | [34] | ◕ | − | − | ● | − |
| FAS4M and System Sketcher | [35,53] | ◑ | − | ◑ | ◔ | ◑ |
| Integrated Product Model for Conceptual Design | [37] | ◑ | − | ◑ | ● | ◑ |
| MagicGrid | [38] | ● | ◕ | − | ● | − |
| Open SE/OpenMBEE | [39] | ◔ | ● | − | ● | − |
| SYSMOD | [40] | ◑ | − | ◔ | ● | ◑ |
| Mechatronic Modeller | [46] | ◔ | − | − | ◑ | − |
| SPES | [47,49] | ◔ | − | − | ● | − |
| STRATA | [48] | − | − | − | ● | − |
| C&C2–A | [50,51,52,54] | ◔ | ◔ | ◔ | ● | ◕ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wyrwich, C.; Boelsen, K.; Jacobs, G.; Zerwas, T.; Höpfner, G.; Konrad, C.; Berroth, J. Seamless Function-Oriented Mechanical System Architectures and Models. Eng 2024, 5, 301-318. https://doi.org/10.3390/eng5010016
Wyrwich C, Boelsen K, Jacobs G, Zerwas T, Höpfner G, Konrad C, Berroth J. Seamless Function-Oriented Mechanical System Architectures and Models. Eng. 2024; 5(1):301-318. https://doi.org/10.3390/eng5010016
Chicago/Turabian StyleWyrwich, Christian, Kathrin Boelsen, Georg Jacobs, Thilo Zerwas, Gregor Höpfner, Christian Konrad, and Joerg Berroth. 2024. "Seamless Function-Oriented Mechanical System Architectures and Models" Eng 5, no. 1: 301-318. https://doi.org/10.3390/eng5010016
APA StyleWyrwich, C., Boelsen, K., Jacobs, G., Zerwas, T., Höpfner, G., Konrad, C., & Berroth, J. (2024). Seamless Function-Oriented Mechanical System Architectures and Models. Eng, 5(1), 301-318. https://doi.org/10.3390/eng5010016