1. Introduction
Cardiovascular disease is a group of disorders of the heart and blood vessels, including coronary heart disease, cerebrovascular disease, and rheumatic heart disease, etc. [
1]. It is one of the most common causes of death in the world. In 2013, cardiovascular disease claimed a total of 17.3 million lives (31% of total deaths), which is a significant increase from 12.3 million in 1990 (25.8% of total deaths). Since the 1970s, death rates from cardiovascular diseases have increased in developing countries regardless of age group, while it declines in most developed countries [
2].
There is an increasing demand for a reliable heart monitoring system to capture intermittent abnormalities and detect serious heart behaviors, leading to sudden death in extreme cases. In addition to cardiac monitoring, there is a growing need to capture the respiratory function in several contexts, such as sleep apneas. For example, “Internet-of-Medical-Things (IoMT)” are now considered to be a good strategy for monitoring the abnormalities of breathing and cardiac rate. A wearable monitoring strain sensor detects accidents and sends the information immediately to the medical staff [
3].
Therefore, there is a need to develop a highly sensitive, durable, and biocompatible strain sensor. In this paper, a new one-dimensional nanomaterial-based strain sensor is introduced for respiratory rate monitoring, followed by the fabrication process and the experimental platform. Then, we performed stretch tests on the strain sensor for the verification of the sensor’s durability. Finally, the results of the respiration monitoring of the anesthetized rat are presented.
2. Theory
Compared to other strain sensors such as capacitive, piezoelectric, and triboelectric sensors, piezoresistive sensors have gained interest as they provide high sensitivity with simple device design and readout circuits. The working principle of the piezoresistive sensor is based on the strain effect: when the conductor or semiconductor material is mechanically deformed under the action of external force, its electrical properties change accordingly. The sensitivity of the strain sensor could be characterized by the gauge factor (GF) [
4]:
where r
0 represents the initial resistance of the strain sensor, Δr represents the difference between its real-time resistance under stretching r and the original value r
0 (Δr = r − r
0). l
0 represents the initial length of the strain sensor, Δl represents the change in the length (Δl = l − l
0, l the real-time length).
In general, metallic materials have a significantly low GF (about 2), indicating a low sensitivity [
5]. In addition, the appearance of the microcracking of the metallic thin films affects its stretch capability. Non-linear electromechanical behavior is the discrete deformation behavior of the conductive networks at different strain regimes. It impacts the long-term sensitivity and stretchability of the strain.
One-dimensional material was thus chosen to solve the problem of the metallic piezoresistive strain sensor. In this paper, carbon nanotubes (CNTs) [
6] were mixed with poly(3,4-ethylenedioxythiophene) polystyrene sulfonate (PEDOT:PSS) [
7] to obtain more stable filler networks to avoid the resistance value shift caused by device aging and the repetitive tests. The CNT network formed a thin film less compact than the metallic layer, whereas the conductive polymer PEDOT:PSS filled the space in the network to ensure the tolerance of the stretch.
To encapsulate the wearable strain sensor, instead of the traditional polymers such as Polydimethylsiloxane (PDMS), Dragon skin (DS FX-Pro) was considered for its good elasticity, robustness, as well as biocompatibility.
3. Experimental
The conventional method of the strain sensor fabrication was realized by the deposition of gold evaporation on Polydimethylsiloxane (PDMS), and then covered all patterned surfaces with another PDMS layer. The obtained GF was very high (GF from 2.5 × 106 to 10 × 106); however, two of the major limitations were: (i) the response was linear up to 0.3% strain only followed by the sudden change in the resistance value and (ii) poor recoverability. The nominal resistance of the device significantly changed after releasing the applied strain; therefore, nanocomposite materials, such as carbon nanotubes, were chosen to have a GF high enough (from 3 to 6) to sense subtle movements but more robust and show a linear change in resistance up to a strain of 40%. In addition, the strain sensor is based on a mixture of CNTs; PEDOT:PSS has a more significant GF (about 50, 60). Moreover, instead of a linear shape, such 1D material was encapsulated in the polymer with ‘U’ shape, which was very useful to increase the sensitivity of the strain sensor.
3.1. Fabrication
The strain sensor has a length of 3.5 cm, a width of 2 cm, and a thickness of 2 mm. The center groove of CNTs mixed with PEDOT:PSS has two branches in parallel (length = 2 cm, width = 2 mm, thickness = 0.4 mm). Both branches are connected at one side, and the distance between them equals 2 mm.
To fabricate the strain sensor by the unconventional method, here is the process to follow (See
Figure 1):
- 1
In the first step, a Dragon Skin (DS) chip containing macro channels was realized by using a standard molding process. The Kapton tape was cut with a blade to define the dimensions of the macro channel.
- 2
Then, carbon nanotubes (CNTs) suspension (5 or 6 times, approximately 30 µL at a time) was dropped into the DS channel. The suspension, approximately 0.1–0.5 wt% in isopropanol (IPA), filled the channels of the DS mold through capillary forces. The conductive polymer poly(3,4-ethylenedioxythiophene) polystyrene sulfonate (PEDOT:PSS), which, similar to an elastic sheet, was deposited and mixed with CNTs. It enables CNTs to stay connected to each other although the strain sensor was under stretch force.
- 3
Finally, copper (Cu) wires were attached using silver epoxy paste. A sandwich-type structure was realized by pouring another layer of DS, which flows into the CNT network and cross-linked with the bottom layer of DS. The top Dragon Skin layer encapsulated fully and firmly the CNT sensing material, thus improving the robustness of the device.
3.2. Experimental Set-Up
The wearable strain sensor was first tested using a linear stage controlled by E-861 PiezoWalk
® NEXACT
® Controller (See
Figure 2a). Thanks to the monitoring with LabVIEW controlled by Keithley 2400 source meter, the strain sensor was stretched between 0.01 mm/s to 10 mm/s. When there was no stretch force, the strain sensor’s resistance was equal to the other three resistances with a fixed value (22 kΩ).
The Wheatstone bridge consists of four resistors, three of them are fixed resistors R
10, R
11, and R
12 (which have a value close to the resistivity of the strain sensor when it is at rest) and the fourth one is the strain sensor itself. The bridge is connected to a low-power operational amplifier with a gain of two that can be tuned with the feedback resistor R
13 (47 kΩ). We chose the MCP6401 operational amplifier thanks to its characteristics: operating voltage from 1.8 V to 6 V, low quiescent current of 45 µA, rail-to-rail input and output; these features make this operational amplifier well suited for battery-powered applications (See
Figure 2b).
This allows the verification of the viability and durability of the CNTs/PEDOT:PSS-based strain sensor. The transformed current signal (or output DC voltage signal) was monitored by an oscilloscope (DSOX2024A-Keysight Technologies) (See
Figure 2c) or multifunction hardware (Analog Discovery 2) and recorded for data processing. Thanks to Analog Discovery 2, the fast Fourier transform was obtained at the same time under the output DC voltage signal curve (See
Figure 2d).
4. Results and Discussion
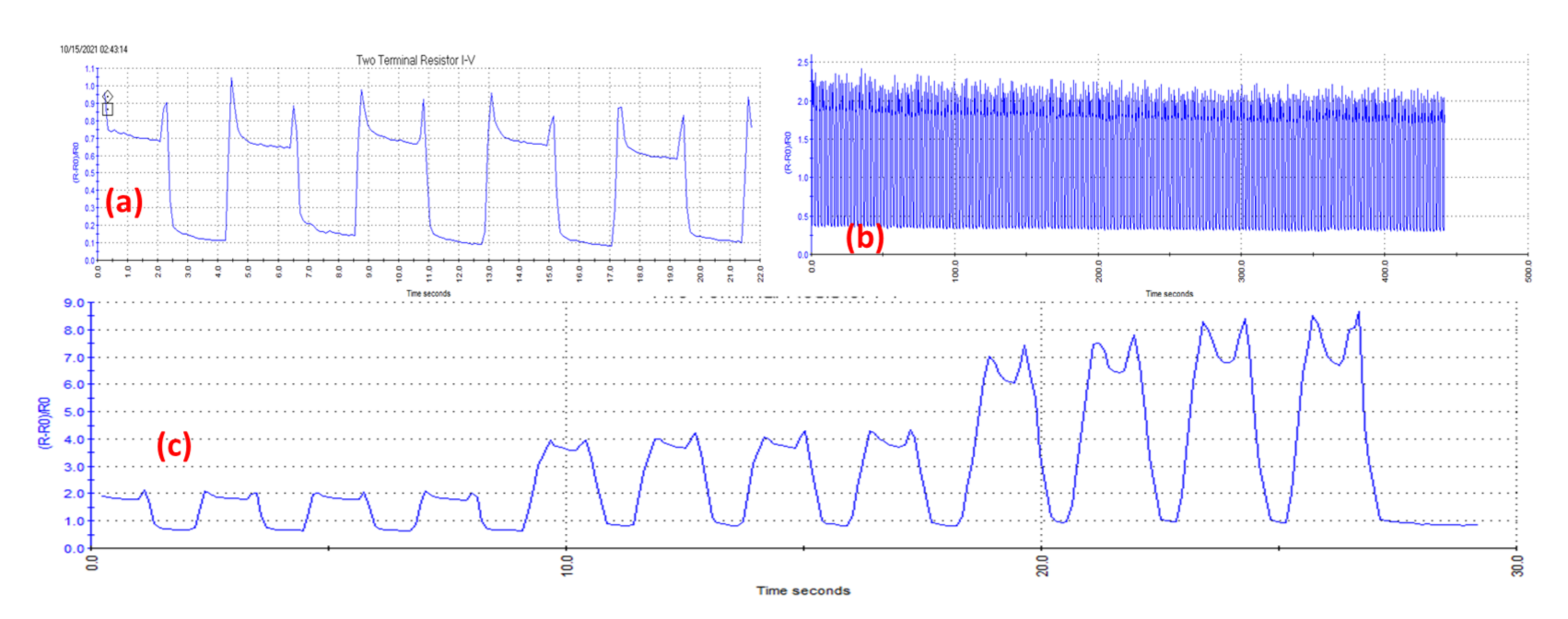
The relative resistance variation of the strain sensor ΔR/R
0 was measured under repeated stretches by applying different stretch values (
Figure 3b,c). When the stretch length of the strain sensor was equal to 0.36 mm, the ratio ΔR/R
0 changed from 0.1 to 0.7 (
Figure 3a). As the applied stretch force was cyclical, the signal curve was also repetitive. There are some peaks, which were observed at the beginning and the end of the square signal. Such “instantaneous stretch-relax” phenomenon might be related to the elasticity of the strain sensor. These measurements showed that the sensor resistance is stable and that the electrical characteristics of the sensor are maintained.
After the validation, such CNTs/PEDOT:PSS-based strain sensor was reversibly attached above the rat chest for its respiration monitoring during anesthesia. Isoflurane (2.5%) was used to make the rat sleep during the experiment [
8]. The regular respiration curve for 60 s is shown in
Figure 4a. The output voltage evolution is between 0.6 and 0.7 V. For 1 min, the rat respiration rate during the rest equals 62 times/min, which corresponds with the theory value [
9]. The electrical monitoring result is very reliable and repetitive. The experiments were carried out by using three different rats, and stable electrical sensing curves were obtained (
Figure 4b–d). The rat’s state was also monitored by the cardiogram, which detected the cardiac frequency during the rat anesthesia (See
Figure 5). The actual measurement was obtained from conventional electrocardiogram (ECG) recording obtained by surface-needles two-lead electrodes, using Powerlab and Chart system (ADinstrument).
One major drawback we found with this type of sensor is the drifting of the nominal resistance that occurs after intensive stretching of the sensor. We experimented with the aging of the sensor by measuring its nominal resistance over several weeks and by stretching at different times. We found that the nominal resistance increases slightly with time but mainly after testing experiences, as shown in
Figure 6. The mechanism behind this shift in resistance is not well known and we think that permanent changes in the CNTs network can occur with time but also when the sensor is used for large (>10%) elongations. Carbon nanotubes may move within the polymer composite and contacts between CNTs may break during large elongations.
Finally, in order to build the sensor with common shape and functionalities, a filament mold printed by 3D printing was realized to create the repetitive polymer substrate to insert the CNTs.
5. Conclusions
We developed a new wearable strain sensor based on one-dimensional material (CNTs) mixed with conductive polymer (PEDOT:PSS) and reported that the sensitivity and the durability of the wearable strain sensor were improved compared to other CNT based strain sensors. The respiration of the anesthetized rat was successfully monitored using CNTs/PEDOT:PSS-based strain sensor.
In addition to many advantages such as low-cost fabrication, simple fabrication process, ease of testing as well as biocompatibility, stretchable strain sensors will play a crucial role in monitoring patients with cardiovascular disease as well as their breathing and heart rate. Such sensors will enable the new technological drive called “Internet-of-Medical-Things (IoMT)”, which links wearable devices/sensors into a communication network for real-time or periodic patient-doctor communications. The patient information could be immediately recorded and transformed to healthcare service providers, and that might reduce the death rate of cardiovascular disease.
Author Contributions
Conceptualization and methodology, T.X. and A.S.D.; validation, T.X., M.Y., T.G. and P.B.; formal analysis, investigation, and resources, T.X. and M.Y.; data curation, T.X.; writing—original draft preparation, T.X.; writing—review and editing, M.Y., A.S.D. and A.T.-S.; visualization, J.T. and A.L.; supervision, J.T., A.L., B.C. and A.T.-S.; project administration, A.T.-S.; funding acquisition, J.T., A.L., B.C. and A.T.-S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by European Union’s Horizon 2020 research and innovation programme under grant agreement No. 825114.
Institutional Review Board Statement
All investigations conformed to European Parliament Directive 2010/63/EU and were authorized by the local and national ethics committee (CEEA-036-LR, N°22699-2019110611232613 v3).
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Anderson, K.M.; Odell, P.M.; Wilson, P.W.F.; Kannel, W.B. Cardiovascular disease risk profiles. Am. Heart J. 1991, 121, 293–298. [Google Scholar] [CrossRef]
- Moran, A.E.; Forouzanfar, M.H.; Roth, G.A.; Mensah, G.A.; Ezzati, M.; Murray, C.J.L.; Naghavi, M. Temporal Trends in Ischemic Heart Disease Mortality in 21 World Regions, 1980 to 2010. Circulation 2014, 129, 1483–1492. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dahiya, A.S.; Thireau, J.; Boudaden, J.; Lal, S.; Gulzar, U.; Zhang, Y.; Gil, T.; Azemard, N.; Ramm, P.; Kiessling, T.; et al. Review—Energy Autonomous Wearable Sensors for Smart Healthcare: A Review. J. Electrochem. Soc. 2020, 167, 037516. [Google Scholar] [CrossRef]
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadi-Najafabadi, A.; Futaba, D.N.; Hata, K. A stretchable carbon nanotube strain sensor for human-motion detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef] [PubMed]
- Kang, D.; Pikhitsa, P.V.; Choi, Y.W.; Lee, C.; Shin, S.S.; Piao, L.; Park, B.; Suh, K.-Y.; Kim, T.; Choi, M. Ultrasensitive mechanical crack-based sensor inspired by the spider sensory system. Nature 2014, 516, 222–226. [Google Scholar] [CrossRef] [PubMed]
- Tas, M.O.; Baker, M.A.; Masteghin, M.G.; Bentz, J.; Boxshall, K.; Stolojan, V. Highly Stretchable, Directionally Oriented Carbon Nanotube/PDMS Conductive Films with Enhanced Sensitivity as Wearable Strain Sensors. ACS Appl. Mater. Interfaces 2019, 11, 39560–39573. [Google Scholar] [CrossRef] [PubMed]
- Shi, H.; Liu, C.; Jiang, Q.; Xu, J. Effective Approaches to Improve the Electrical Conductivity of PEDOT:PSS: A Review. Adv. Electron. Mater. 2015, 1, 1500017. [Google Scholar] [CrossRef]
- Liu, Z.M.; Schmidt, K.F.; Sicard, K.M.; Duong, T.Q. Imaging oxygen consumption in forepaw somatosensory stimulation in rats under isoflurane anesthesia. Magn. Reson. Med. 2004, 52, 277–285. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Williams, K.A.; Magnuson, M.; Majeed, W.; LaConte, S.M.; Peltier, S.J.; Hu, X.; Keilholz, S.D. Comparison of α-chloralose, medetomidine and isoflurane anesthesia for functional connectivity mapping in the rat. Magn. Reson. Imaging 2010, 28, 995–1003. [Google Scholar] [CrossRef] [PubMed] [Green Version]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}