
A Systematic Approach to Generate 3D Path Loss Heat Maps for WIFI Indoor Positioning †


Abstract
:1. Introduction
2. Existing Systems
3. Proposed Methodology
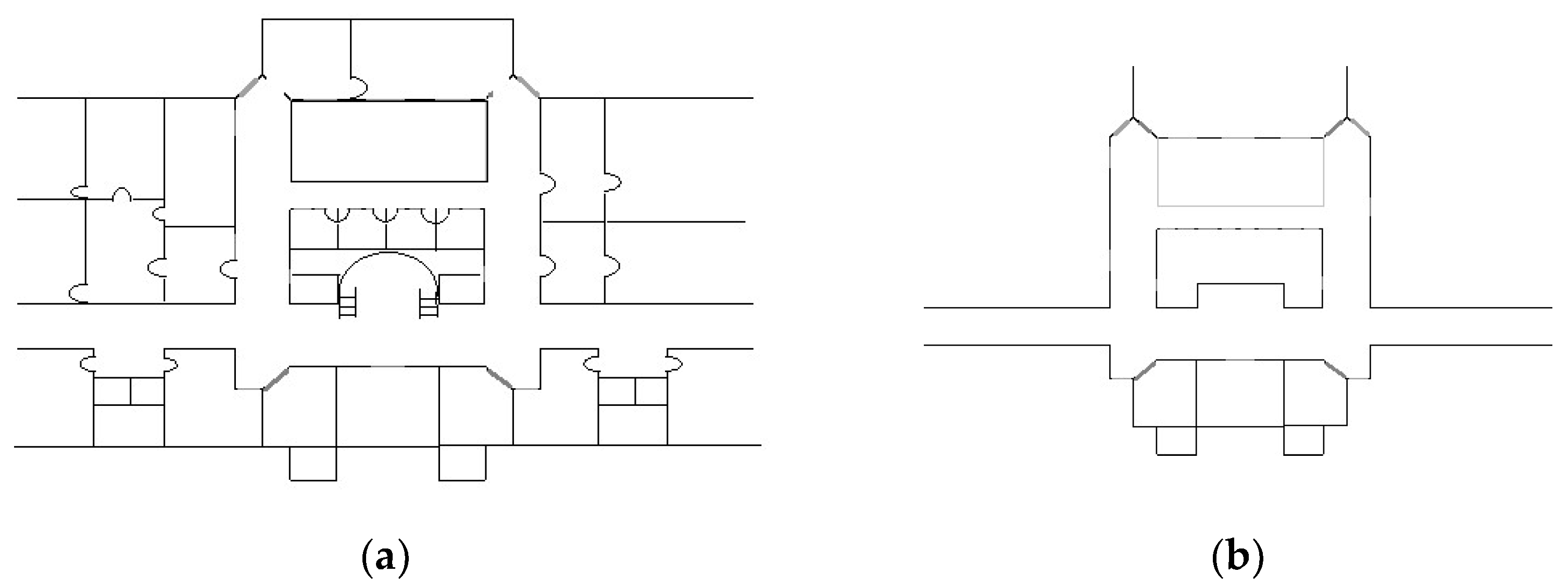
3.1. Construction of Pixel Map
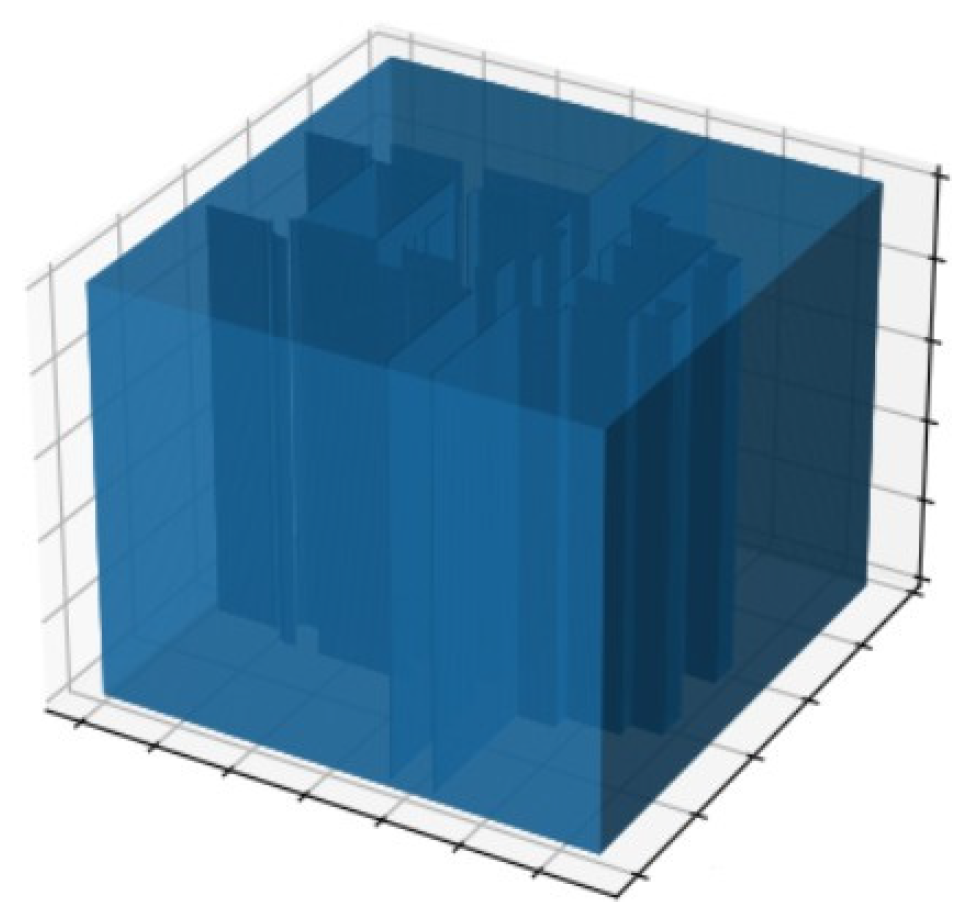
3.2. Three-Dimensional Environment Generation
3.3. Three-Dimensional Path Loss Heat Map Generation
4. Experimental Setup
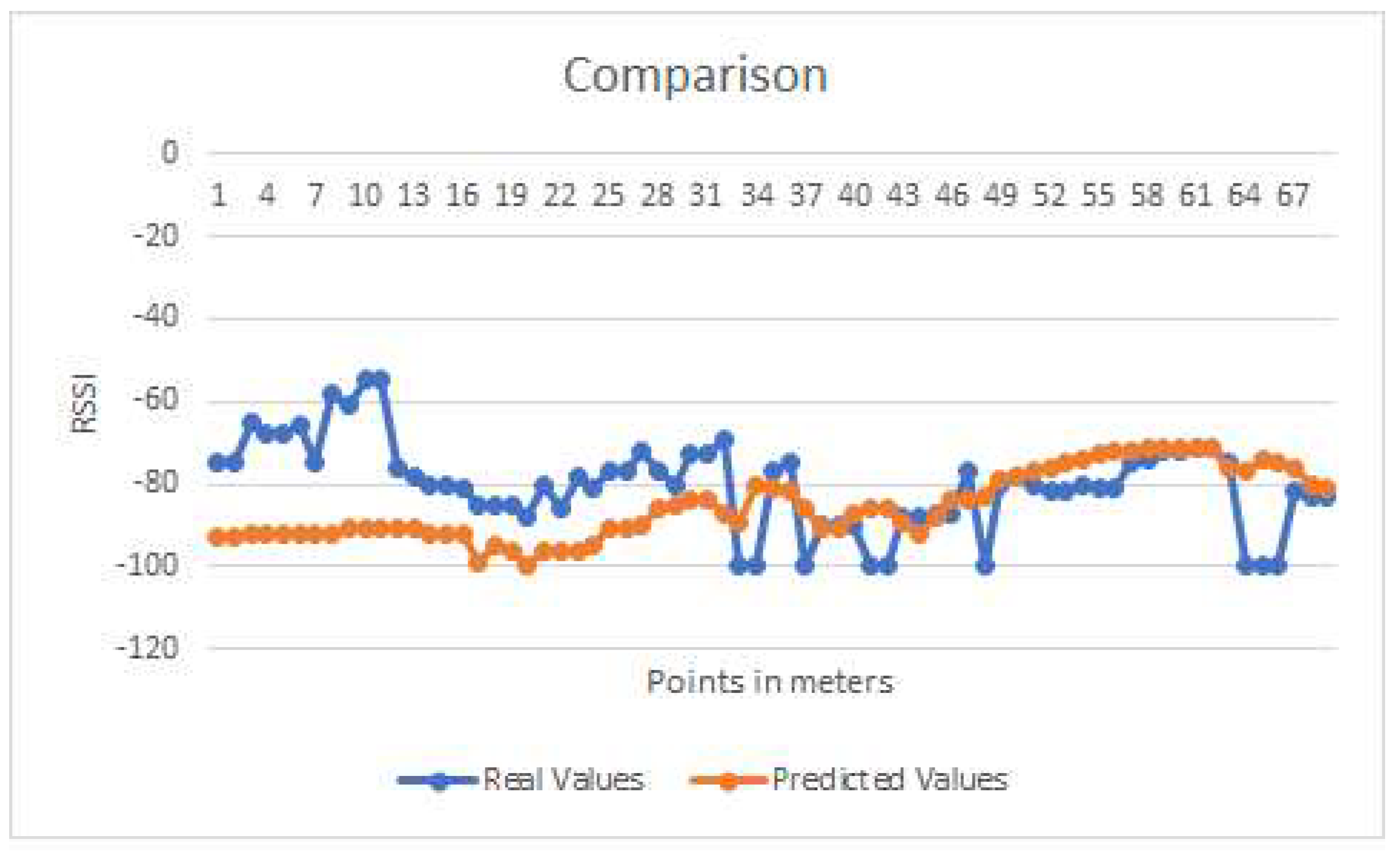
5. Results and Discussion
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ali, M.U.; Hur, S.; Park, Y. Locali: Calibration-free systematic localization approach for indoor positioning. Sensors 2017, 17, 1213. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xia, S.; Liu, Y.; Yuan, G.; Zhu, M.; Wang, Z. Indoor fingerprint positioning based on Wi-Fi: An overview. ISPRS Int. J. Geo-Inf. 2017, 6, 135. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Park, J.G. A novel indoor ranging algorithm based on a received signal strength indicator and channel state information using an extended kalman filter. Appl. Sci. 2020, 10, 3687. [Google Scholar] [CrossRef]
- Sun, M.; Wang, Y.; Xu, S.; Qi, H.; Hu, X. Indoor positioning tightly coupled Wi-Fi FTM ranging and PDR based on the extended Kalman filter for smartphones. IEEE Access 2020, 8, 49671–49684. [Google Scholar] [CrossRef]
- Wang, Y.; Xiu, C.; Zhang, X.; Yang, D. WiFi indoor localization with CSI fingerprinting-based random forest. Sensors 2018, 18, 2869. [Google Scholar] [CrossRef] [Green Version]
- Shen, G.; Chen, Z.; Zhang, P.; Moscibroda, T.; Zhang, Y. Walkie-Markie: Indoor pathway mapping made easy. In Proceedings of the 10th USENIX Symposium on Networked Systems Design and Implementation (NSDI 13), Berkeley, CA, USA, 2 April–5 April 2013; pp. 85–98. [Google Scholar]
- Khoshelham, K.; Zlatanova, S. Sensors for indoor mapping and navigation. Sensors 2016, 16, 655. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, J.; Ren, M.; Wang, P.; Meng, J.; Mu, Y. Indoor Localization Based on VIO System and Three-Dimensional Map Matching. Sensors 2020, 20, 2790. [Google Scholar] [CrossRef] [PubMed]
- El Boudani, B.; Kanaris, L.; Kokkinis, A.; Kyriacou, M.; Chrysoulas, C.; Stavrou, S.; Dagiuklas, T. Implementing deep learning techniques in 5G IoT networks for 3D indoor positioning: DELTA (DeEp Learning-Based Co-operaTive Architecture). Sensors 2020, 20, 5495. [Google Scholar] [CrossRef] [PubMed]
- Jiménez, A.R.; Seco, F.; Torres-Sospedra, J. Tools for smartphone multi-sensor data registration and GT mapping for positioning applications. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Measure | Proposed | LOCALI |
|---|---|---|
| Mean Error (dBm) | 2.17 | 16.03 |
| Min Error (dBm) | 0 | −9 |
| Max Error (dBm) | 36 | 49 |
| Correlation coefficient | −0.09 | 0.84 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haider, A.; Farooq, M.H.; Mukhtar, H.; Ali, M.U. A Systematic Approach to Generate 3D Path Loss Heat Maps for WIFI Indoor Positioning. Eng. Proc. 2021, 12, 106. https://doi.org/10.3390/engproc2021012106
Haider A, Farooq MH, Mukhtar H, Ali MU. A Systematic Approach to Generate 3D Path Loss Heat Maps for WIFI Indoor Positioning. Engineering Proceedings. 2021; 12(1):106. https://doi.org/10.3390/engproc2021012106
Chicago/Turabian StyleHaider, Ali, Muhammad Hussnain Farooq, Hamza Mukhtar, and Muhammad Usman Ali. 2021. "A Systematic Approach to Generate 3D Path Loss Heat Maps for WIFI Indoor Positioning" Engineering Proceedings 12, no. 1: 106. https://doi.org/10.3390/engproc2021012106
APA StyleHaider, A., Farooq, M. H., Mukhtar, H., & Ali, M. U. (2021). A Systematic Approach to Generate 3D Path Loss Heat Maps for WIFI Indoor Positioning. Engineering Proceedings, 12(1), 106. https://doi.org/10.3390/engproc2021012106