
Equivalent Sliding Mode Controller for Stability of DC Microgrid †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
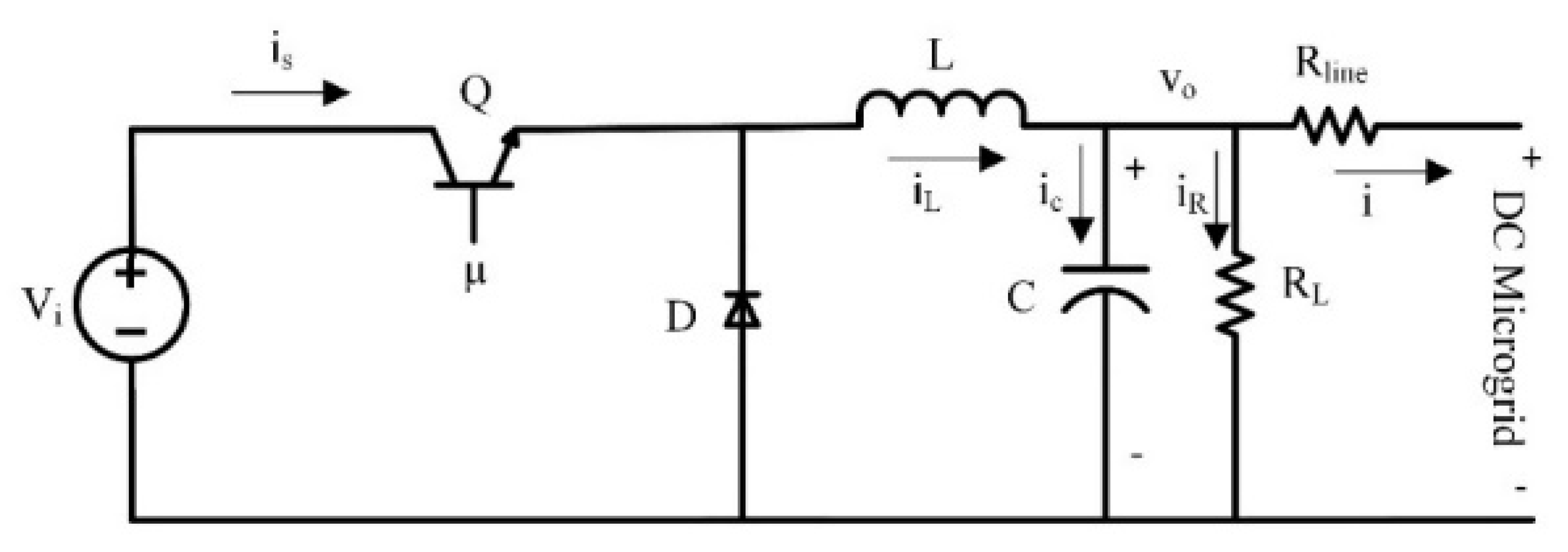
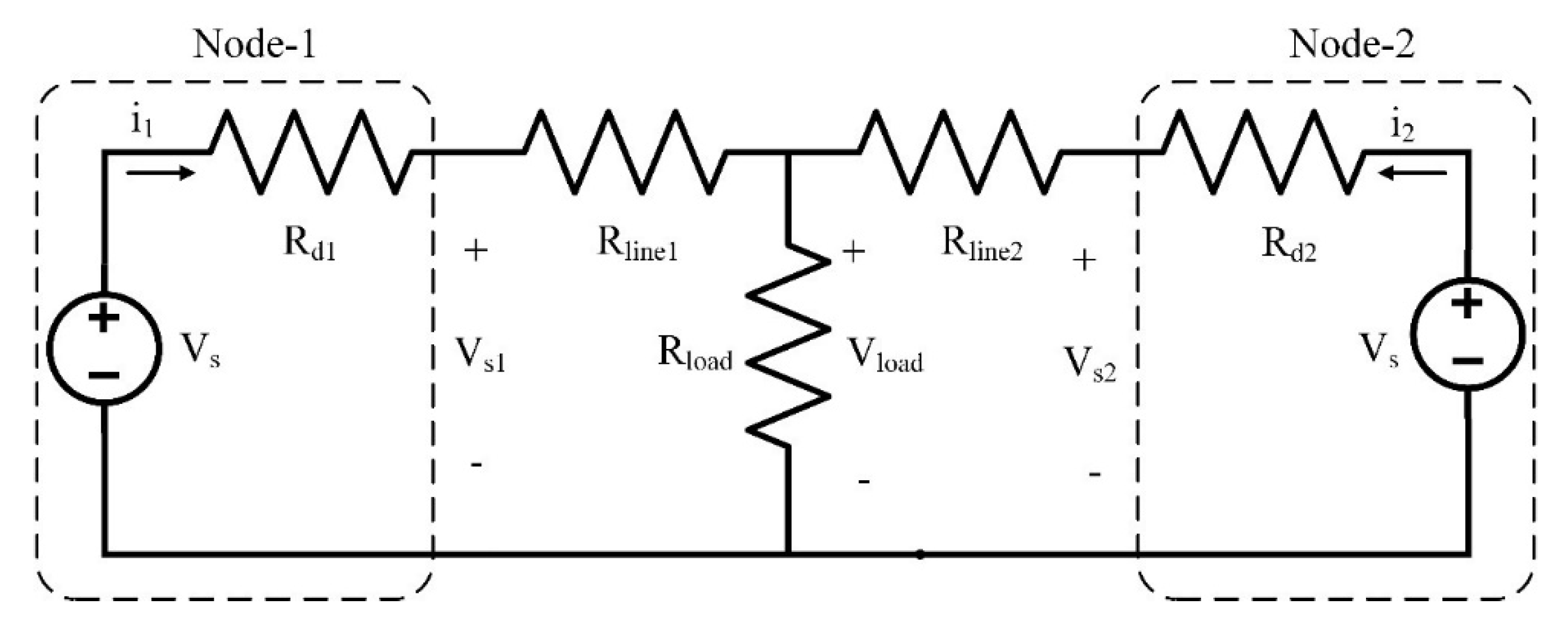
2. Dc Microgrid Model
3. Droop Control
4. Sliding Mode Control
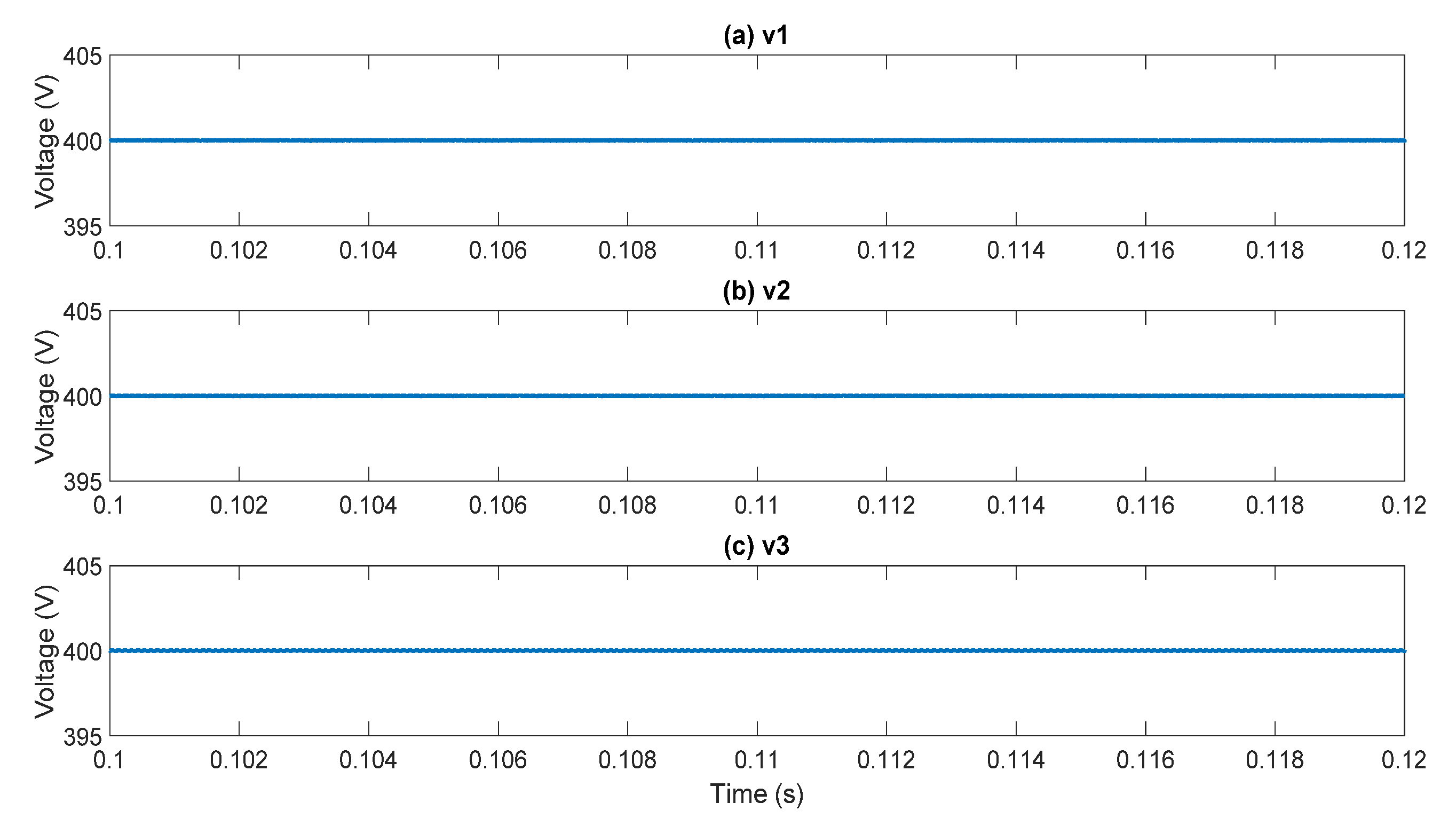
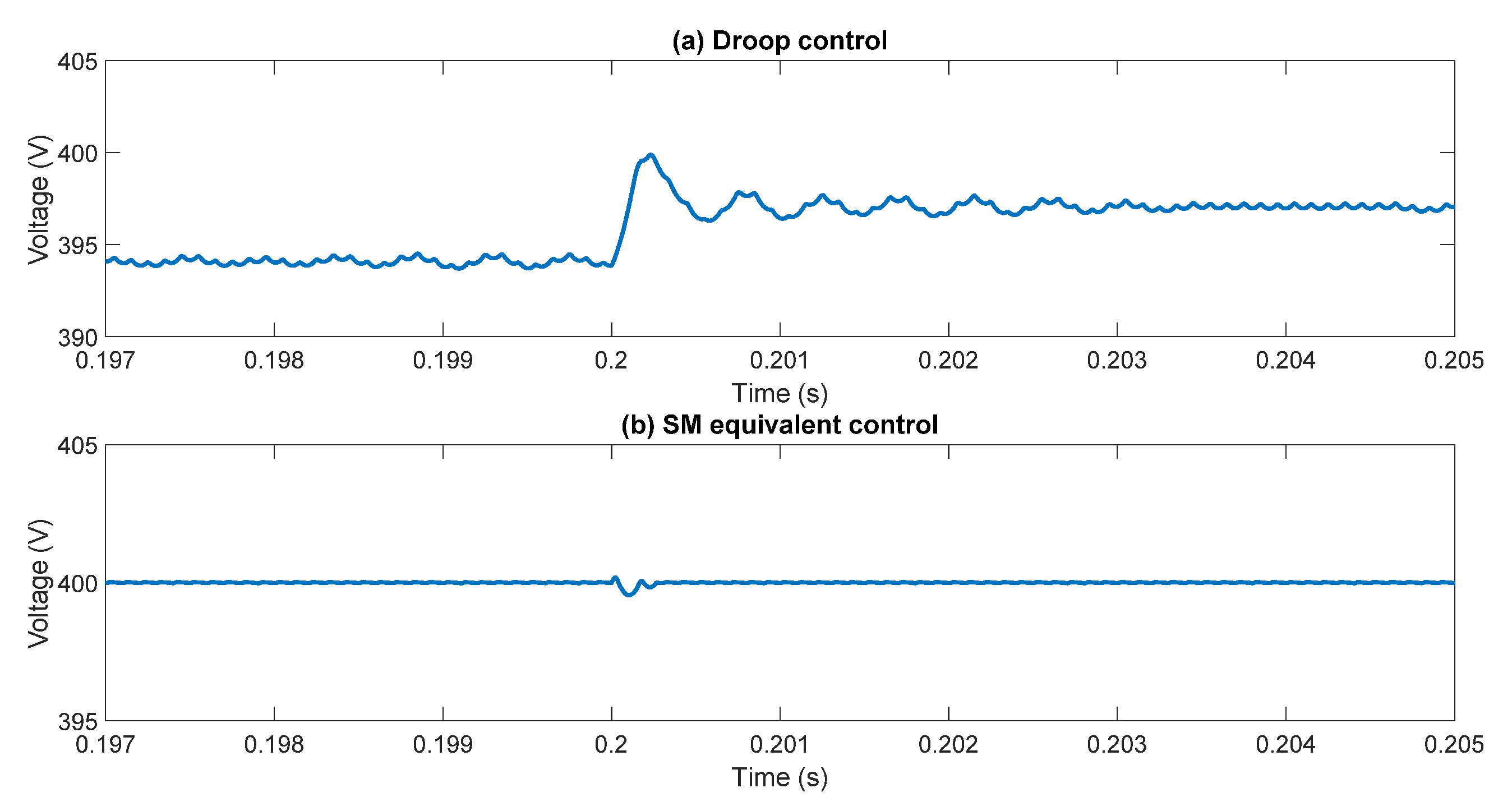
5. Results and Discussion
6. Conclusions
References
- Tsai, C.-H.; Bai, Y.-W.; Lin, M.-B.; Jhang, R.J.R.; Chung, C.-Y. Reduce the standbypower consumption of a microwave oven. IEEE Trans. Consum. Electron. 2013, 59, 54–61. [Google Scholar] [CrossRef]
- Techakittiroj, K.; Wongpaibool, V. Co-existence between AC-distribution and DC-distribution: In the view of appliances. In Proceedings of the International Conference on Computer and Electrical Engineering (ICCEE), Dubai, United Arab Emirates, 28–30 December 2009. [Google Scholar]
- Rashad, M.; Ashraf, M.; Bhatti, A.I.; Minhas, D.M. Mathematical Modeling and Stability Analysis of DC Microgrid Using SM Hysteresis Controller. Int. J. Electr. Power Energy Syst. 2018, 95, 507–522. [Google Scholar] [CrossRef]
- Meng, L.; Shafiee, Q.; Trecate, G.F.; Karimi, H.; Fulwani, D.; Lu, X.; Guerrero, J.M. Review on Control of DC Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1. [Google Scholar] [CrossRef] [Green Version]
- Becker, D.; Sonnenberg, B. DC microgrids in buildings and data centers. In Proceedings of the IEEE 33rd International Telecommunications Energy Conference (INTELEC), Amsterdam, The Netherlands, 9–13 October 2011. [Google Scholar]
- Rajagopalan, S.; Fortenbery, B.; Symanski, D. Power quality disturbances within DC data centers. In Proceedings of the IEEE 32nd International Telecommunication Energy Con-ference (INTELEC), Orlando, FL, USA, 6–10 June 2010. [Google Scholar]
- Reed, G. DC technologies: Solutions to electric power system advancements. IEEE Power Energy Mag. 2012, 10, 10–17. [Google Scholar] [CrossRef]
- Patterson, B. DC, come home: DC microgrids and the birth of the Enernet. IEEE Power Energy Mag. 2012, 10, 60–69. [Google Scholar] [CrossRef]
- Anand, S.; Fernandes, B.G.; Guerrero, J. Distributed Control to Ensure Proportional Load Sharing and Improve Voltage Regulation in Low-Voltage DC Microgrids. IEEE Trans. Power Electron. 2013, 28, 1900–1913. [Google Scholar] [CrossRef] [Green Version]
- Spiazzi, G.; Mattavelli, P. Chapter 8: Sliding-mode control of switched-mode power supplies. In The Power Electronics Handbook; Skvarenina, T.L., Ed.; CRC Press LLC: Boca Raton, FL, USA, 2002. [Google Scholar]
- Nawaz, A.; Wu, J.; Long, C. Mitigation of circulating currents for proportional current sharing and voltage stability of isolated DC microgrid. Electr. Power Syst. Res. 2020, 180, 106123. [Google Scholar] [CrossRef]
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in Electromechanical Systems; Taylor and Francis: London, UK, 1999. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rashad, M.; Raoof, U.; Siddique, N.; Ahmed, B.A. Equivalent Sliding Mode Controller for Stability of DC Microgrid. Eng. Proc. 2021, 12, 23. https://doi.org/10.3390/engproc2021012023
Rashad M, Raoof U, Siddique N, Ahmed BA. Equivalent Sliding Mode Controller for Stability of DC Microgrid. Engineering Proceedings. 2021; 12(1):23. https://doi.org/10.3390/engproc2021012023
Chicago/Turabian StyleRashad, Muhammad, Uzair Raoof, Nazam Siddique, and Bilal Ashfaq Ahmed. 2021. "Equivalent Sliding Mode Controller for Stability of DC Microgrid" Engineering Proceedings 12, no. 1: 23. https://doi.org/10.3390/engproc2021012023
APA StyleRashad, M., Raoof, U., Siddique, N., & Ahmed, B. A. (2021). Equivalent Sliding Mode Controller for Stability of DC Microgrid. Engineering Proceedings, 12(1), 23. https://doi.org/10.3390/engproc2021012023