
Comparative Study of Optimization Techniques Based PID Tuning for Automatic Voltage Regulator System †

Abstract
:1. Introduction
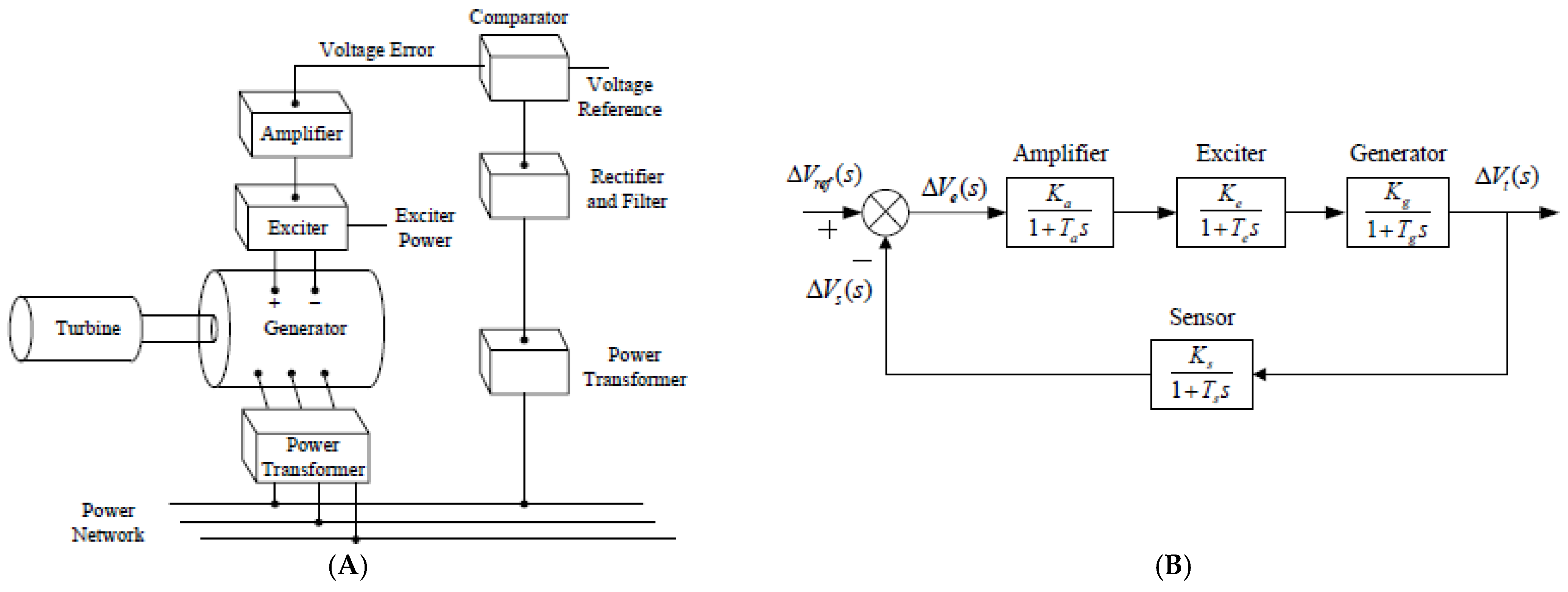
2. AVR System
3. Implementation of Proposed Optimization Techniques
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Saadat, H. Power System Analysis; McGraw-Hill: New York, NY, USA, 1999. [Google Scholar]
- Ogata, K. Modern Control Engineering, 4th ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Gaing, Z.-L. A particle swarm optimization approach for optimum design of pid controller in avr system. IEEE Trans. Energy Convers. 2004, 19, 384–391. [Google Scholar] [CrossRef] [Green Version]
- Rahimian, M.; Raahemifar, K. Optimal pid controller design for avr system using particle swarm optimization algorithm. In Proceedings of the 2011 24th Canadian Conference on Electrical and Computer Engineering (CCECE), Niagara Falls, ON, Canada, 8–11 May 2011; pp. 337–340. [Google Scholar]
- Yang, X.-S.; Deb, S. Cuckoo search via lévy flights. In Proceedings of the 2009 World Congress on Nature Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Bingul, Z.; Karahan, O. A novel performance criterion approach to optimum design of PID controller using cuckoo search algorithm for avr system. J. Frankl. Inst. 2018, 355, 5534–5559. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Dixit, A.; Lokhande, M.; Joshi, N. Optimization of automatic voltage regulator using moth flame optimization algorithm. Int. J. Eng. Dev. Res. 2016, 4, 367–371. [Google Scholar]
- Eskandar, H.; Sadollah, A.; Bahreininejad, A.; Hamdi, M. Water cycle algorithm—A novel metaheuristic optimization method for solving constrained engineering optimization problems. Comput. Struct. 2012, 110–111, 151–166. [Google Scholar] [CrossRef]
- Pachauri, N. Water cycle algorithm-based pid controller for AVR. COMPEL Int. J. Comput. Maths. Electr. Electron. Eng. 2020, 39, 551–567. [Google Scholar] [CrossRef]
- Chatterjee, S.; Mukherjee, V. Pid controller for automatic voltage regulator using teaching–learning based optimization technique. Int. J. Electr. Power Energy Syst. 2016, 77, 418–429. [Google Scholar] [CrossRef]
- Abdelmadjid, R.; Khaled, D. Design of Standalone Micro-Grid Systems Using Teaching Learning Based Optimization. Alger. J. Signals Syst. 2017, 2, 75–85. [Google Scholar]
- Bouaraki, M.; Abdelmadjid, R. Optimal placement of power factor correction capacitors in power systems using Teaching Learning Based Optimization. Alger. J. Signals Syst. 2017, 2, 102–109. [Google Scholar] [CrossRef]
- Hill Climbing Algorithm in Artificial Intelligence. Available online: https://www.javatpoint.com/hill-climbing algorithm-in-ai (accessed on 1 December 2021).
- Lahcene, R.; Abdeldjalil, S.; Aissa, K. Optimal tuning of fractional order pid controller for avr system using simulated annealing optimization algorithm. In Proceedings of the 2017 5th International Conference on Electrical Engineering Boumerdes (ICEE-B), Boumerdes, Algeria, 29–31 October 2017; pp. 1–6. [Google Scholar]
- Sambariya, D.K.; Paliwal, D. Design of PIDA controller using bat algorithm for AVR power system. Adv. Energy Power 2016, 6, 1–6. [Google Scholar] [CrossRef]
- Tang, Y.; Zhao, L.; Han, Z.; Bi, X.; Guan, X. Optimal gray PID controller design for automatic voltage regulator system via imperialist competitive algorithm. Int. J. Mach. Learn. Cyber. 2016, 7, 229–240. [Google Scholar] [CrossRef]
- Al Gizi, A.J.H.; Mustafa, M.W.; Al-Geelani, N.A.; Alsaedi, M.A. Sugeno fuzzy PID tuning, by genetic-neutral for AVR in electrical power generation. J. Appl. Soft. Comput. 2015, 28, 226–236. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Parameter Ranges | Used Values in AVR System |
|---|---|---|
| Amplifier | 10 ≤ Ka ≤ 40 0.02 ≤ Ta ≤ 0.1 | KA = 10 TA = 0:1 |
| Exciter | 1 ≤ Ke ≤ 2 0.4 ≤ Te ≤ 1 | Ke = 1 Te = 0:4 |
| Generator | 1 ≤ Kg ≤ 2 1 ≤ Tg ≤2 | Kg = 1 TG = 1 |
| Sensor | Kr = 1 0.001 ≤ Tr ≤ 0.006 | KR = 1 TR = 0:01 |
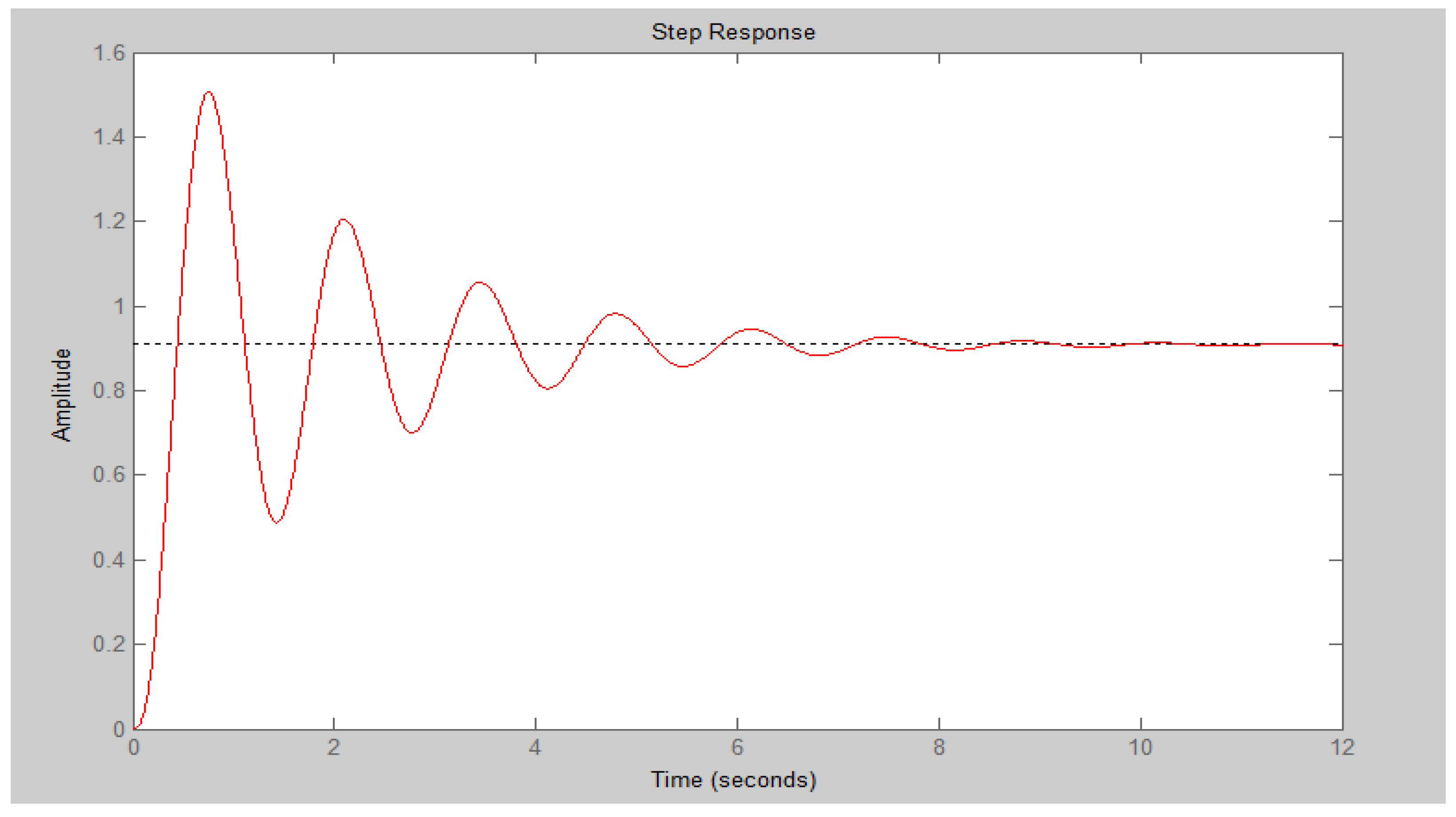
| Rise Time (s) Tr | Settling Time 2% (s) Ts | Overshoot Mp (%) | Steday State Error Ess |
|---|---|---|---|
| 0.261 | 6.99 | 65.7 | 0.091 |
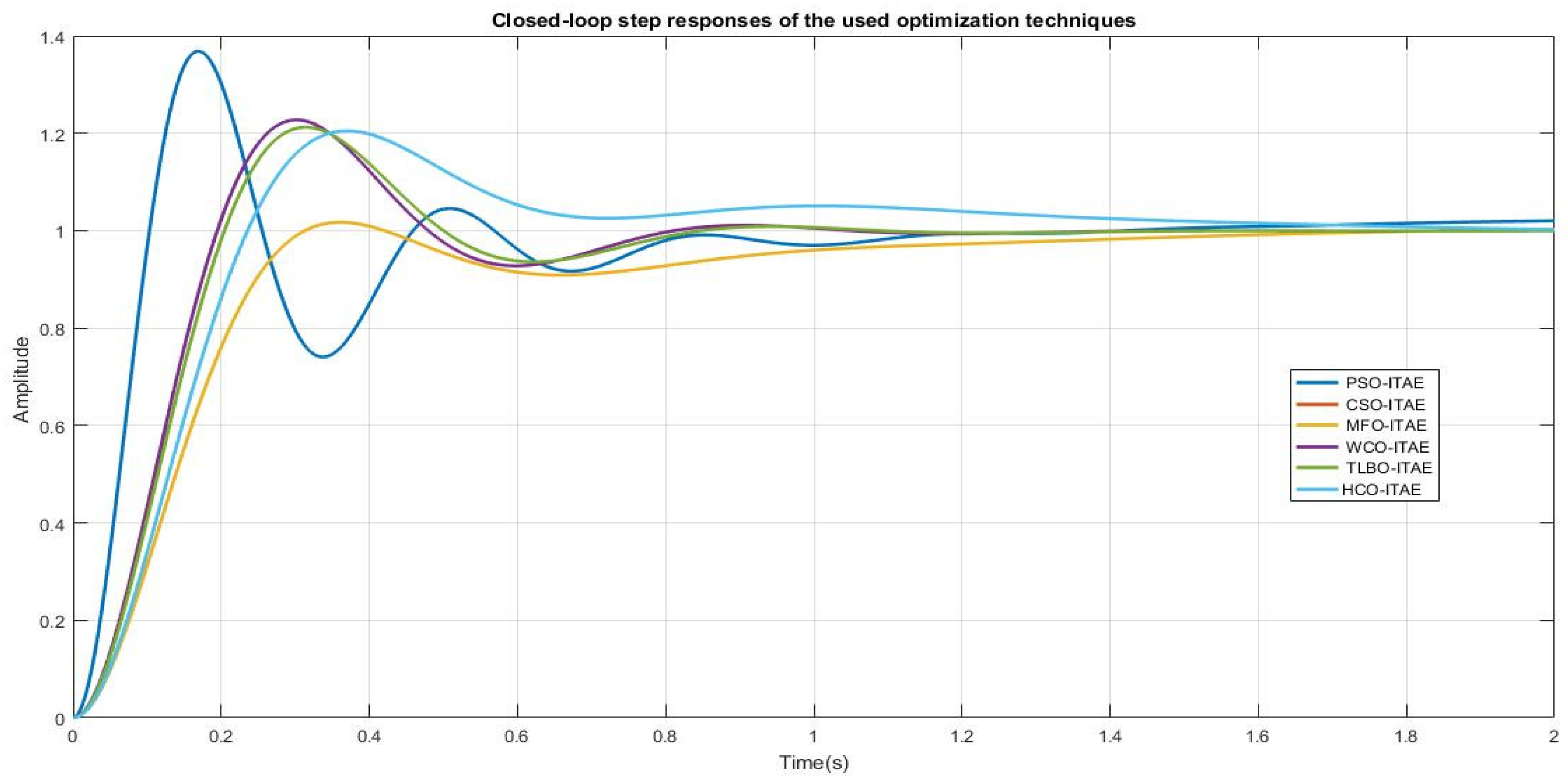
| Optimization Technique | Controller Parameters Kp–Ki–Kd | Tr: 0.1→0.9 | Ts + 2% | Mp (%) |
|---|---|---|---|---|
| PSO-ITAE | 0.7027–0.5471–0.37852 | 0.1969 | 1.3466 | 1.718 |
| CSO-ITAE | 0.6999–0.54672–0.37904 | 0.1967 | 1.3498 | 1.7266 |
| MFO-ITAE | 1.5643–1.0713–0.5132 | 0.1319 | 0.7518 | 22.7511 |
| WCO-ITAE | 1.4802–1.0153–0.4809 | 0.1386 | 0.7769 | 21.2312 |
| TLBO-ITAE | 1.2298–1.8472–0.3944 | 0.1623 | 0.8533 | 16.3603 |
| HCO-ITAE | 0.5900–0.4200–0.2000 | 0.3272 | 0.5131 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rais, M.C.; Dekhandji, F.Z.; Recioui, A.; Rechid, M.S.; Djedi, L. Comparative Study of Optimization Techniques Based PID Tuning for Automatic Voltage Regulator System. Eng. Proc. 2022, 14, 21. https://doi.org/10.3390/engproc2022014021
Rais MC, Dekhandji FZ, Recioui A, Rechid MS, Djedi L. Comparative Study of Optimization Techniques Based PID Tuning for Automatic Voltage Regulator System. Engineering Proceedings. 2022; 14(1):21. https://doi.org/10.3390/engproc2022014021
Chicago/Turabian StyleRais, Mohamed Cherif, Fatma Zohra Dekhandji, Abdelmadjid Recioui, Mohamed Sadek Rechid, and Lahcen Djedi. 2022. "Comparative Study of Optimization Techniques Based PID Tuning for Automatic Voltage Regulator System" Engineering Proceedings 14, no. 1: 21. https://doi.org/10.3390/engproc2022014021
APA StyleRais, M. C., Dekhandji, F. Z., Recioui, A., Rechid, M. S., & Djedi, L. (2022). Comparative Study of Optimization Techniques Based PID Tuning for Automatic Voltage Regulator System. Engineering Proceedings, 14(1), 21. https://doi.org/10.3390/engproc2022014021