1. Introduction
The stability of power systems has a major and continuous concern in the system operation. Under steady state conditions, each of the connected generators may have the same electrical speed in the power system, which is also known as the synchronism of generators. Any disturbance can effect the synchronous operation of the alternators. The stability of a power system, defined as the capability of the system to return to its normal steady state situation after the transients, is detached.
The disturbance can be of two types: (a) a small disturbance and (b) a large disturbance. Small signal analysis, i.e., linear equations are used for the analysis of small signal disturbances. The random or uneven changes in the load or generation are called small disturbances. Faults or the loss of large loads resulting in a voltage dip are called large disturbances and require fast action to clear out the fault. The protection system may take action in this case.
Sub-synchronous resonance is a special type of power system dynamic and stability problem, due to which the turbine-generator shaft experiences torsional oscillations. These oscillations can be hazardous causing fatigue in the turbine-generator shaft, which results in the failure of the power generation unit [
1].
A definition for SSR is provided by the IEEE [
2]: “Subsynchronous resonance is a condition where the electric network exchanges energy with a turbine generator at one or more of the natural frequencies of the combined system below the synchronous frequency of the system.”
Any system operation condition, during which energy is exchanged at a given sub-synchronous frequency, has been included in the same IEEE definition previously mentioned. This also includes the “natural” modes of oscillation that occur because of the inherent system characteristics, as well as the “forced” modes of oscillation that are driven by a particular device or controlling scheme or controller.
Sub-synchronous torsional interaction (SSTI) is an instability phenomenon mainly associated with synchronous machines (SMs) [
3]. A torsional resonance in the turbine-generator (T-G) shaft is destabilized through the interaction with the electrical synchronous machine and network dynamics.
2. Sub-Synchronous Interaction
2.1. Sub-Synchronous Resonance (SSR)
Most often in the electrical power system the compensation of line transmission is a series type, the sub-synchronous resonance is the exchange of energy with the turboalternator at one or more natural frequencies lower than the fundamental frequency of 60 or 50 Hz.
There are three types of sub-synchronous resonance.
2.1.1. Torsional Interaction (SSR-TI)
The interaction between the mechanical system and a power supply system compensated in series when small disturbances occur.
2.1.2. Induction Generator Effect (IGE)
This is the self-excitation of a series compensated power supply system. This is independent of the torsion modes of the generator shaft.
2.1.3. Torque Amplification (TA)
The stress amplification of the turbine generator shaft system by transient torques on the generator rotors caused by serious disturbances in a series of compensated power systems.
2.2. Subsynchronous Control Interactions (SSCI)
This is the interaction of the electronic devices (for instance, SVC, STATCOM and HVDC) with the electric power system containing nearby series compensated transmissions.
2.3. Subsynchronous Torsional Interaction (SSTI)
Sub-synchronous torsional interaction (SSTI) occurs when the operation of the electrical system causes mechanical damping to the generator, and which is large enough to exceed the inherent mechanical damping of the shaft at a natural torsional frequency of the system mechanical.
3. Sub-Synchronous Torsional Interaction (SSTI)
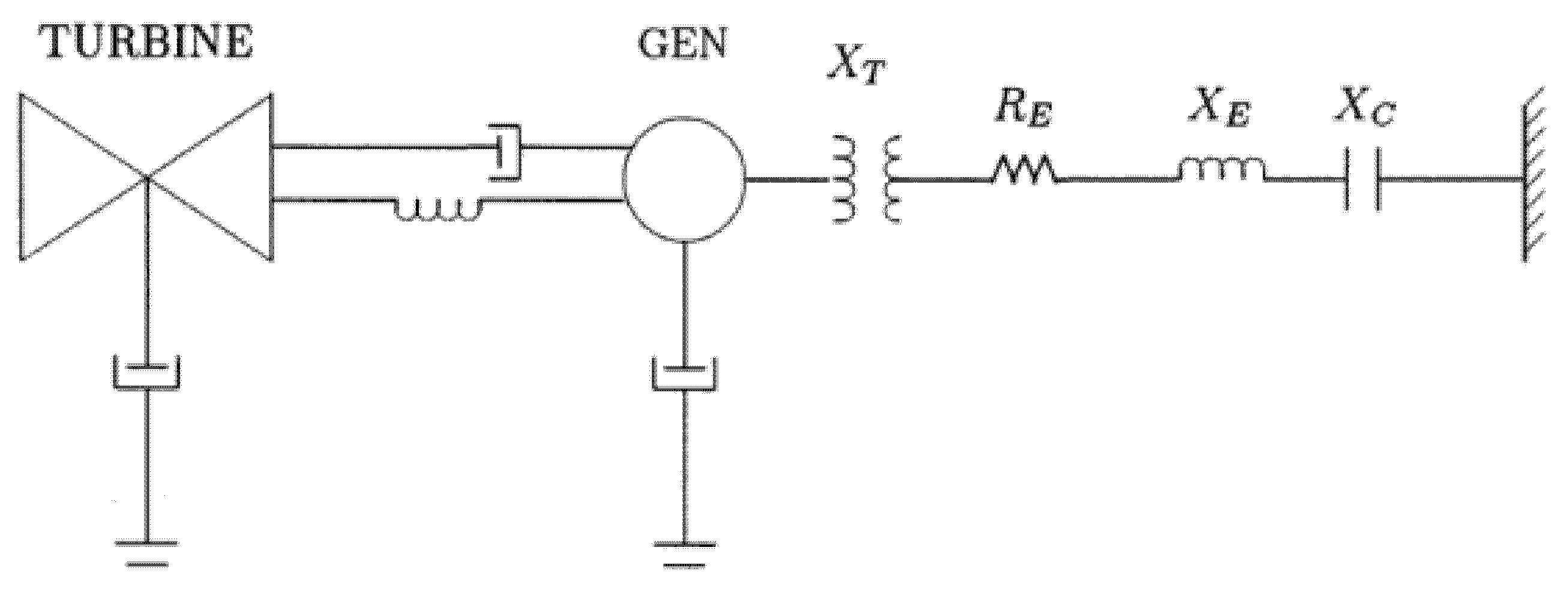
Networks containing transmission lines, as
Figure 1, with series compensation are the most noted example of a natural mode of sub-synchronous operation. These lines have natural frequencies,
, that are defined by Equation (1) with their series inductance,
L, and capacitance,
C, combination given as follows.
where
is the natural frequency associated with a particular line
LC product,
is the system base frequency and
and
are the inductive and capacitive reactance, respectively.
The oscillations of the rotating element of the generator at a sub-synchronous frequency, fm, induces voltages in the armature with components of (i) sub-synchronous frequency (fa − fm) and (ii) super-synchronous frequency (fa + fm), where fa is the operating system frequency [
4]. This also sets up currents in the armature (and network) whose magnitudes and phase angles are determined by the impedances existing in the network. Both current components (sub- and super-synchronous) set up electromagnetic torques of the same frequency, fm. It can be noted that the positive damping torque appears as a result of the super-synchronous frequency, whereas the negative damping torque appears as a result of the sub-synchronous frequency.
The net torque can result in negative damping if the magnitudes of the sub-synchronous frequency currents are large and in phase with the voltages (of the sub-synchronous frequency). This situation can appear when the electrical network connected to the generator armature resonates around the frequency of (fa − fm).
Torsion mode oscillations (frequencies) of the shaft are generally identified and can be obtained from the manufacturer sheet of the generator. The frequencies at which the network oscillates depend on many factors, such as the network switching arrangement at a particular time and the amount of series capacitance in service.
The power system engineer needs a method for examining a large number of feasible operating conditions to determine the possibility of SSR interactions. The eigenvalue program can be used as a tool for SSR analysis. Moreover, the eigenvalue computation tracks the locus of the system eigenvalues as parameters, such as the series capacitance that changed to characterize the equipment outages. If the root locus of a given eigenvalue approaches or crosses the imaginary axis, then a critical situation generally appears that needs the application of one or more SSR countermeasures.
There are many situations in which the system and the generator may interact with sub-synchronous effects. A few interactions are of more concern to a power system engineer, such as the induction generator effect, transient torque effect and torsional interaction effect. In this study, the latter is taken into consideration: when the sub-synchronous torque induced in the generator is close to one of the torsional natural modes of the turbine-generator shaft, torsional interactions are produced. Under this operation condition, the increase in the oscillations in the generator rotor begins, and the armature voltage components at both the sub-synchronous and super-synchronous frequencies are induced due to this motion. The induced sub-synchronous frequency voltage is phased to maintain the sub-synchronous torque. If the inherent mechanical damping torque is equal to or greater than the rotating system torque, the system itself will be excited. This phenomenon is called “torsional interaction.”
4. Synchro-Phasors Measurement Unit
A synchro-phasor is defined according the IEEE standard C37.118 as “A phasor calculated from data samples using a standard time signal as the reference for the measurement; however, synchronized phasors from remote sites have a defined common phase relationship” [
5]. According to the same standard, a synchronizing source that provides the common timing reference may be local or global. One commonly utilized synchronizing signal is the satellite signal broadcast from the global positioning system (GPS). A PMU is a standalone apparatus that measures 50 (or 60) Hz in AC voltage and current signals, and presents them in phasor form with their frequencies, as
Figure 2.
The techniques that are mainly used to measure the steady state frequency are based on the assumption of the fixed frequency model. In wide area monitoring and control application, the dynamic frequency or instantaneous frequency is more useful to explain the behavior of the system. The developed Smart DFT algorithm [
6] was used to estimate the instantaneous frequency, and then the estimated phasor amplitude and phase angle were corrected.
During power system disturbances, the sinusoidal frequency f(t) was no longer constant and was a function of time ‘t’. The sinusoidal signal waveform can be represented by its nominal frequency,
, varying with a frequency deviation, Δf(t), as follows:
where
: maximum value of the input signal;
: the nominal frequency
Δf: the frequency offset;
: the initial phase of the input signal.
It is traditionally represented by a phasor:
Assuming that, the signal x(t) is sampled ‘m’ times per period of the nominal frequency,
(50 Hz or 60 Hz), to generate the sample set:
The phasor tracking algorithm (SDFT) may be applied by defining θ as
Assuming that, the sampling rate is ‘m’ times of the correcting computation frequency, the exact solution of the phasor at the off-nominal frequency can be obtained by the following equations.
Using the sampling set given by Equation (3), the fundamental frequency component of DFT of {
(k)} can be obtained:
The instantaneous frequency can then be calculated from the previous equations and given by the following relation:
The local frequency, f, can be defined as a derivative of the angle variation of a phasor (IEEE standard C37.118). Under frequency variations due to sub-synchronous torsional oscillations, the local frequency is the sum of the fixed nominal frequency component, f
0, and the off-nominal frequency variation, Δf (t), due to Δθ sub (t):
The advantage of this technique is the rapid detection of this phenomenon in real-time and then the mitigation techniques can be applied rapidly.
The synchronized phasor measurement technology is relatively new, and consequently several research groups around the world are actively developing applications using this technology. It seems clear that many of these applications can be conveniently grouped as follows:
Power System Real Time Monitoring;
Advanced network protection;
Advanced control schemes.
5. Case Study
This proposed approach has been implemented in a power network, as
Figure 3, in the GNL company situated in Oran, Algeria [
7]. The configuration of the system that is based on SPMUs and other equipment is shown in
Figure 4. The scenario of the operation can be summarized as follows:
Two gas turbine generators (GTGs) supply the electricity to the GNL factory;
A motor of 17 MW starts to operate through the use of VSD;
Some of the resistive and inductive loads (about 12 MW) are connected.
When the motor speed has attained around 95% of its rated speed using VSD, GTG1 has been disconnected due to the high vibration caused by SSTI. Then, only GTG2 supplies the electricity to the whole power network of the factory. After a few seconds, GTG2 will also have been disconnected due to the same phenomenon (SSTI), before finishing the starting steps investigated by VSD. This leads to the blackout. The spectral of the vibrations that may be measured during this phenomenon is shown in
Figure 4. Using the data provided by SPMU and the implemented system may present the results, as shown in
Figure 5. It can be noted that the peaks of the angle variation is at the frequencies 12.5 and 25 Hz, as shown in
Figure 6.
6. Conclusions
This paper investigated the sub-synchronous torsional interaction (SSTI) for two gas turbine generators that were disconnected.
This proposed approach can be rapidly implemented and its cost is low. It can be used to detect the sub-synchronous torsional interaction phenomenon, and as a rapid method for analyzing it. Then, the mitigation technique, such as the active damping technique, can be applied.
Author Contributions
Conceptualization, M.T. and H.B.; methodology M.T. and H.B.; validation, M.T. and H.B.; writing—original draft preparation, M.T.; writing—review and editing, H.B.; supervision, M.T.; project administration, H.B.; funding acquisition, H.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research funded by DGRSDT/MESRS Algeria.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Acknowledgments
This work was supported by the Signals and Systems Laboratory (LSS), IGEE, University M’hamed BOUGARA of Boumerdes (UMBB), under the research Phd Project: “Inter-area oscilla-tion minimization in power system” funded by DGRSDT/MESRS Algeria.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Anderson, P.M.; Agrawal, B.L.; Van Ness, J.E. Subsynchronous Resonance in Power Systems; The Institute of Electrical and Electronics Engineers, Inc.: New York, NY, USA, 1989. [Google Scholar]
- IEEE SSR Working Group. Terms, Definitions, and Symbols for Subsynchronous Oscillations. IEEE Trans. 1985, PAS-104, 1326–1334. [Google Scholar] [CrossRef]
- Padiyar, K.R. Analysis of Subsynchronous Resonance in Power Systems; Department of Electrical Engineering, Indian Institute of Science: Bangalore, India, 1999; ISBN 978-1-4613-7577-7. [Google Scholar]
- Choo, Y.; Agalgaonkar, A.; Muttaqi, K.M.; Perera, S.; Negnevitsky, M. Subsynchronous torsional interaction behaviour of wind turbine-generator unit connected to an HVDC system. In Proceedings of the IECON 2010: 36th Annual Conference of the IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 996–1003. [Google Scholar]
- IEEE Standard for Synchrophasors for Power Systems. IEEE Std C37.118.1-2011, 3rd ed.; Advanced Engineering Thermodynamics; Bejan, A., Ed.; Wiley: New York, NY, USA, 2011. [Google Scholar] [CrossRef]
- Yang, J.-Z.; Liu, C.-W. A precise calculation of power system frequency and phasor. IEEE Trans. Power Del. 2000, 15, 494–499. [Google Scholar] [CrossRef]
- Internal Report; GNL: Arzew, Algeria, 2017.
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





