1. Introduction
The ability to monitor major process state variables, such as biomass, substrate, and product concentrations accurately is essential for the automatic control of bioprocesses. However, due to the unavailability of inexpensive or dependable measuring systems, rapid online measurements of said state variables are often not feasible. Therefore, the development of chemometric software sensors that are capable of achieving rapid and accurate estimation of said process states, is of great interest [
1,
2,
3].
One example for such software sensors that received a lot of interest lately are Kalman filters and their nonlinear extensions. They can be used for continuous and accurate estimation of the state of bioprocesses. In general, the Kalman filters combine available general knowledge in the shape of a process model and the already available process information such as online measurements for an estimation of the true state of the process. Various nonlinear extensions for the Kalman filter are available. They mostly differ in the way the approximation of the prediction uncertainty is performed. Lisci and Tronci [
4] applied an extended Kalman filter (EKF) to predict the state of a fed-batch cultivation of baker’s yeast. The variables of interest were temperature, dissolved oxygen amount, and the substrate concentration. Another EKF implementation presented by Klockow et al. [
5] showed the estimation and set-point control of the substrate concentration based on FIA measurements of glucose during a
S. cerevisiae batch cultivation. A nonlinear extension to the Kalman filter is the so-called unscented Kalman filter (UKF) in which the uncertainty or covariance of the predicted state is approximated using the unscented transform [
6].
In recent years, several authors demonstrated the application of the UKF for the online estimation of state variables and parameters in various processes. For example, Jianlin et al. [
7] demonstrated an approach based on a UKF for the prediction of biomass and substrate in a fed-batch cultivation of
S. cerevisiae based on the measurements of dissolved oxygen and carbon dioxide. Krämer and King [
8] used a Kalman filter in conjunction with the cultivation of
S. cerevisiae for noise removal from their measured state variables. The measurements themselves were based on near infrared spectra taken from the fed-batch cultivations.
In this publication, the application of an unscented Kalman filter in S. cerevisiae batch cultivations is shown for the estimation of biomass, glucose, and ethanol concentration. Additionally, the kinetic parameters or growth rates are estimated online. The only measurements required are infrequent ethanol measurements in the gas phase. To assess the reliability the suggested method, it was tested on three S. cerevisiae batch cultivations that differed slightly in the initial substrate concentrations.
2. Material and Methods
2.1. Yeast Cultivation and Offline Measurements
In total, three cultivations of
S. cerevisiae—C1, C2, and C3—were carried out. In all three batch cultivations, 100 mL of the Schatzmann medium [
9] was inoculated with 5 g of yeast. The batches were then, after 10 min of shaking, put into a stirred tank reactor (Minifors, Inifors HT, Bottmingen, Switzerland). The glucose concentrations in the media used for the batch cultivations were 2.85, 5, and 9 g/L for C1, C2, and C3, respectively. Additionally, 1 mL/L trace elements solution was added. All cultivations were performed at a temperature of 30 °C and a controlled pH of 5. The aeration and agitation rates were also kept at 3.5 L/min and 450 rpm, respectively.
2.2. Ethanol Gas Sensors
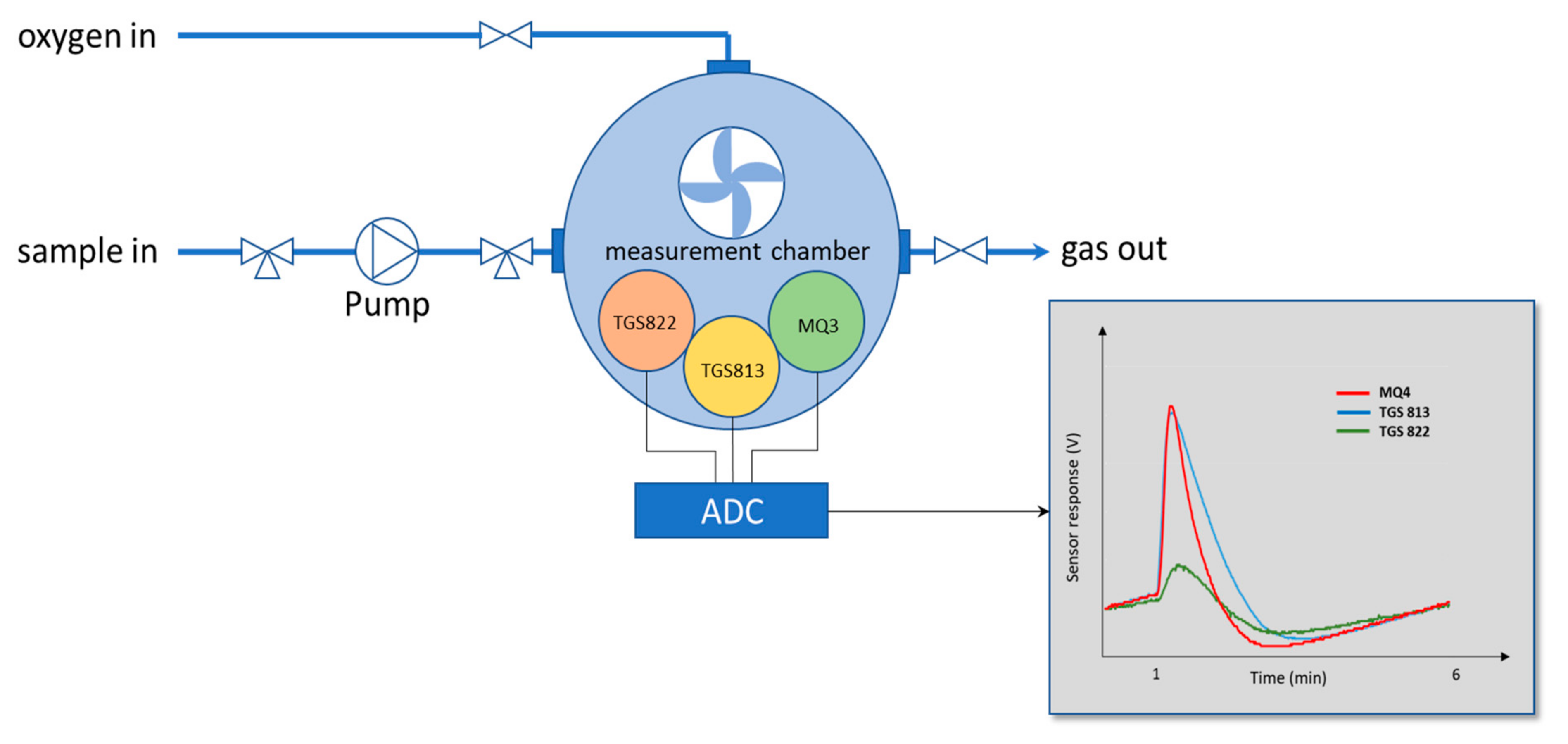
As shown in
Figure 1, the airtight measurement chamber with a volume of ~250 mL contained an array of three different commercially available and reasonably cheap tin oxide gas sensors (MQ3, TGS 813, and TGS 822). During a measurement, a gas pump (Schwarzer Precision, Essen, Germany) pumped a continuous sample gas stream with 400 mL/min into and through the measurement chamber for 10 s. Then, the sensors need to be regenerated with oxygen. This was carried out by flushing the measurement chamber with either pure oxygen or compressed air for 90 or 120 s, respectively. Then, the chamber is sealed by closing all valves. Proper mixing inside the chamber is achieved by a 40 mm fan, running at 4000 rpm. After 3 min, the regeneration is finished. One measurement cycle, therefore, takes about 5 min, and during the entire cycle, the output of the three gas sensors is captured by a 10-bit ADC and sent to a computer for processing. The three 5 min long data streams from the three MOS sensors are then evaluated by a Matlab program, and through a PLSR model, the ethanol concentration in the sample gas stream can then be determined once every 5 min. For the calibration of said PLSR model, cultivation C1 was used.
2.3. Dynamic Process Model
When applying a Kalman filter, a process model is required. To do this, the cell growth kinetic is estimated by two Monod terms. The first (main) substrate is glucose, and then, after glucose is consumed, ethanol becomes the secondary substrate and, therefore, the growth-limiting factor. The process itself is modelled as a batch process in an ideal stirred tank reactor:
|
|
|
|
|
|
|
| |
|
| |
|
| |
Here, X, G, and E represent the main state variables, namely the biomass, glucose, and ethanol concentrations, respectively., , and are the three conversion factors (yields) that describe the conversion ratio from glucose to biomass, from glucose to ethanol, and from ethanol to biomass. and stand for the actual specific cell growth rates on glucose and ethanol. They are computed from the maximum specific growth rates and based on Monod kinetics. The values for and are treated as state variables as well so that they are estimated with the Kalman filtering.
2.4. State Estimation
Here, an unscented Kalman filter (UKF) was implemented to continuously estimate biomass, glucose, and ethanol concentrations. Additionally, the two main kinetic parameters and the maximum growth rates were continuously estimated and corrected. Like all Kalman filter variants, the UKF estimates the most likely state of a system by weighing a simulated process state, obtained from the process model, and actual measurements. The weights are chosen based on measurement error and model uncertainty. A more detailed explanation of the Kalman implementation used here can be found in [
10].
2.5. Offline Measurements
For determining the concentrations of biomass, ethanol, and glucose, samples from the bioreactor were taken regularly. Cell dry mass was determined by centrifugation of 1.5 mL of sample at 14,000 rpm for 10 min at 4 °C. The wet cells were placed in a drying cabinet for 24 h at 103 °C. After cooldown for 30 min, the dry mass was weighted. The remaining supernatant was analyzed by HPLC to measure the glucose and ethanol concentrations. For evaluation of the UKF algorithm, the root-mean square error (
RMSE) was calculated from the UKF estimated concentrations and the offline measured concentrations. Additionally, from the
RMSE, the percentage standard errors (
SE) were calculated with respect to the highest concentrations:
| |
| | |
stands for the concentration estimated by the UKF method, stands for the offline concentration determined by HPLC analysis, N represents the number of measurements, and represents the highest concentration in the corresponding offline value.
3. Results and Discussion
In
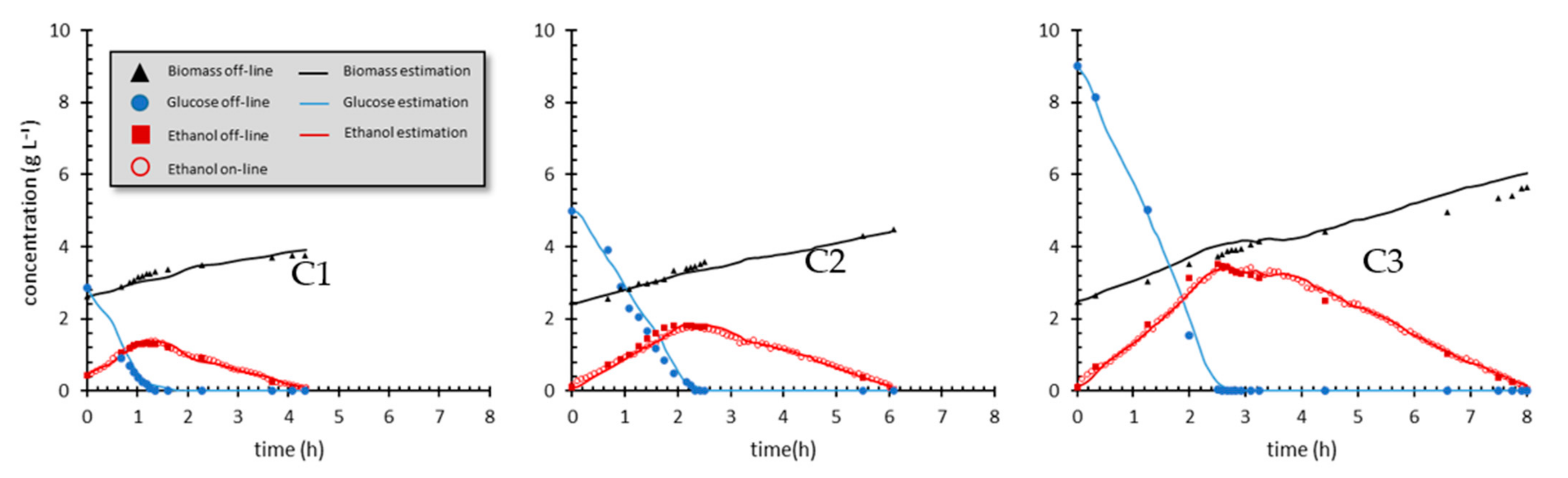
Figure 2, the UKF-estimated concentrations of biomass, glucose, and ethanol (solid lines) in the bioreactor are shown. The gas sensor online measured ethanol concentrations (hollow red circles), the HPLC offline ethanol and glucose, and the biomass concentrations (solid forms) are presented as well. These offline measurements are only shown as a reference to demonstrate that the estimated values are in fact accurate.
When a difference in the online measured and simulated values is detected, the values estimated by the Kalman filter are corrected to be more in line with the measured ones. In cultivation C2, within the time from 2 to 3 h, there is a deviation between the reported gas sensor value and the offline reference values. The reason for this could be various factors such as fluctuations in the temperature or electrical noise influencing the sensor electronics.
The accuracy of the Kalman Filter regarding the estimation of state variables was evaluated by calculating the RMSEP and SEP between the estimated ethanol, biomass, and glucose concentration and the measured offline concentrations, and the results are presented in
Table 1:
The standard error of estimated ethanol concentration is below 5% for all three cultivations, which is a reasonable result. The error in cultivation C1 is slightly smaller, as this cultivation was used to calibrate the chemometric model that was used to feed the UKF. It was also possible to estimate the concentrations of biomass and glucose as well, although they were not measured at all. However, the biomass estimation showed quite a large error of almost 10% in the case of C1.
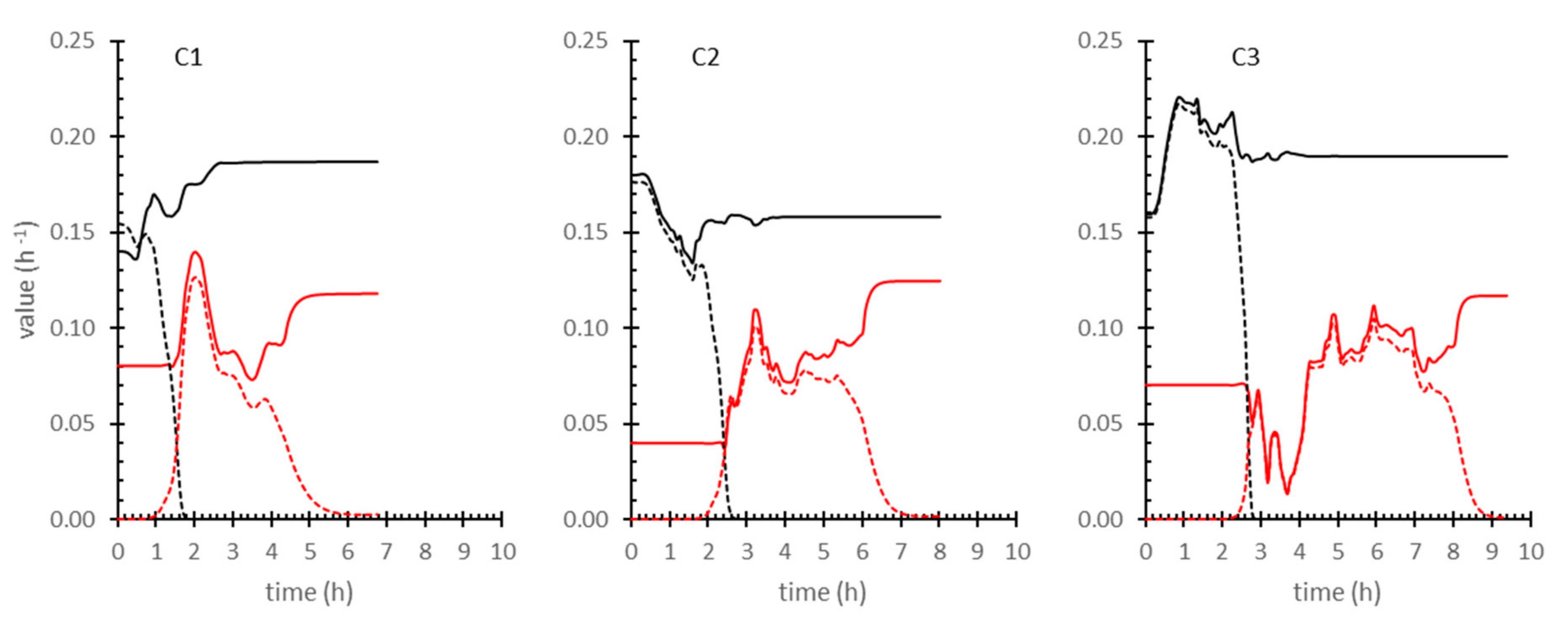
Figure 3 shows the estimated maximum specific growth rates with respect to the consumption of glucose
μmax,G and ethanol
μmax,E, and the specific growth rates itself (
μG and
μE).
As it can be seen in
Figure 3, different starting values for the
μmax values were chosen for each cultivation. These initial values are based on experience with previous cultivations (
and
) and then varied slightly and randomly to see whether the UKF algorithm is capable of correcting these values. In C1, the
μmax,G increases shortly after the inoculation starts; this indicates that the chosen starting value was lower than the actual value. Therefore, the UKF algorithm converges to the true value. When the glucose is almost depleted, the metabolic change from glucose to ethanol consumption takes place; therefore,
μmax,E starts to increase. However, shortly before glucose is completely depleted,
μmax,G increases, which results in a decrease in
μE; therefore, the UKF increases the
μmax,E to compensate for the underestimation. In C2, the specific glucose-based growth rate decreases slightly. Therefore, it can be assumed that the selected starting values for the kinetic parameters are close to their actual values. Similarly, in C3, the specific glucose-based growth rate increases slightly after the inoculation and then decreases again. This points to the fact that the selected starting values for the kinetic parameter is lower than its actual value but the initial guess was close. Nonetheless, with the UKF algorithm used, the values converge quickly to reasonable values.
4. Conclusions
Here, a dynamic nonlinear process model was used in combination with an unscented Kalman filter algorithm to estimate the kinetic parameter and the biomass, glucose, and ethanol concentrations of a batch fermentation of S. cerevisiae. The algorithm only required online data in the form of infrequent ethanol measurements from a MOS gas sensor to achieve this.
Three S. cerevisiae fermentations with slightly differing initial substrate/glucose concentrations were performed to analyze the behavior and capability of the proposed algorithm. The result indicated that the UKF-based algorithm presented was capable of estimating and correcting the specific growth rates online. It was also possible to estimate the concentrations of biomass, glucose, and ethanol continuously online with good accuracy while only actually measuring the ethanol concentration in the headspace with a cheap gas sensor array. The proposed method and algorithm can therefore be used in combination with low-cost gas sensors for monitoring the batch fermentation processes of baker’s yeast.
Author Contributions
Conceptualization, O.P.-D. and A.Y.-D.; methodology O.P.-D. and A.Y.-D.; software, O.P.-D.; investigation, O.P.-D. and A.Y.-D.; data curation, A.Y.-D.; writing—original draft preparation, O.P.-D.; writing—review and editing, O.P.-D., A.Y.-D. and B.H.; supervision, B.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Dochain, D.; Bastin, G. Adaptive control of fed batch bioreactors. Chem. Eng. Commun. 1990, 87, 67–85. [Google Scholar] [CrossRef]
- Dochain, D. State and parameter estimation in chemical and biochemical processes: A tutorial. J. Process Control. 2003, 13, 801–818. [Google Scholar] [CrossRef]
- Bernard, O.; Chachuat, B.; Hélias, A.; Rodriguez, J. Can we assess the model complexity for a bioprocess: Theory and example of the anaerobic digestion process. Water Sci. Technol. 2006, 53, 85–92. [Google Scholar] [CrossRef] [PubMed]
- Lisci, S.; Grosso, M.; Tronci, S. A Geometric Observer-Assisted Approach to Tailor State Estimation in a Bioreactor for Ethanol Production. Processes 2020, 8, 480. [Google Scholar] [CrossRef] [Green Version]
- Klockow, C.; Hüll, D.; Hitzmann, B. Model based substrate set point control of yeast cultivation processes based on FIA measurements. Analytica Chimica Acta 2008, 623, 30–37. [Google Scholar] [CrossRef] [PubMed]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control. 2000, 45, 477–482. [Google Scholar] [CrossRef] [Green Version]
- Jianlin, W.; Xuying, F.; Liqiang, Z.; Tao, Y. Unscented transformation based robust Kalman filter and its applications in fermentation process. Chin. J. Chem. Eng. 2010, 18, 412–418. [Google Scholar]
- Krämer, D.; King, R. A hybrid approach for bioprocess state estimation using NIR spectroscopy and a sigma-point Kalman filter. J. Process Control. 2019, 82, 91–104. [Google Scholar] [CrossRef]
- Schatzmann, H. Anaerobes Wachstum von Saccharomyces cerevisiae: Regulatorische Aspekte des glycolytischen und respirativen Stoffwechsels. Ph.D. Thesis, ETH Zurich, Zürich, Switzerland, 1975. [Google Scholar]
- Yousefi-Darani, A.; Paquet-Durand, O.; Babor, M.; Hitzmann, B. Parameter and state estimation of backer’s yeast cultivation with a gas sensor array and unscented Kalman filter. Eng. Life Sci. 2021, 21, 170–180. [Google Scholar] [CrossRef] [PubMed]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).








{kind=link}
{kind=link}
{kind=link}