
Walking Algorithm Using Gait Analysis for Humanoid Robot †


 ,
, 

{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
- Weight acceptance: it entails transferring body weight to a limb while maintaining forward body movement.
- Single limb support: one limb supports the complete weight of the body.
- Foot stepping: leg progress implies foot clearance from the floor. As it passes in front of the torso, the limb swings through several positions.
- The most critical condition for a humanoid robot’s mobility is to maintain balance and stability.
- The most important criterion for walking is the ability to initiate movement and support iterative walking patterns.
- Musculoskeletal integrity: To maintain a proper walking balance, bones, muscles, and joints collaborate and function together.
- Neurological control permits the communication between brain and muscles to convey instructions and tell the body when to move and how to continue.
- The first phase, known as stance, is when the foot is completely in contact with the ground.
- The second phase is called swing phase in which the foot is not in contact with the ground.
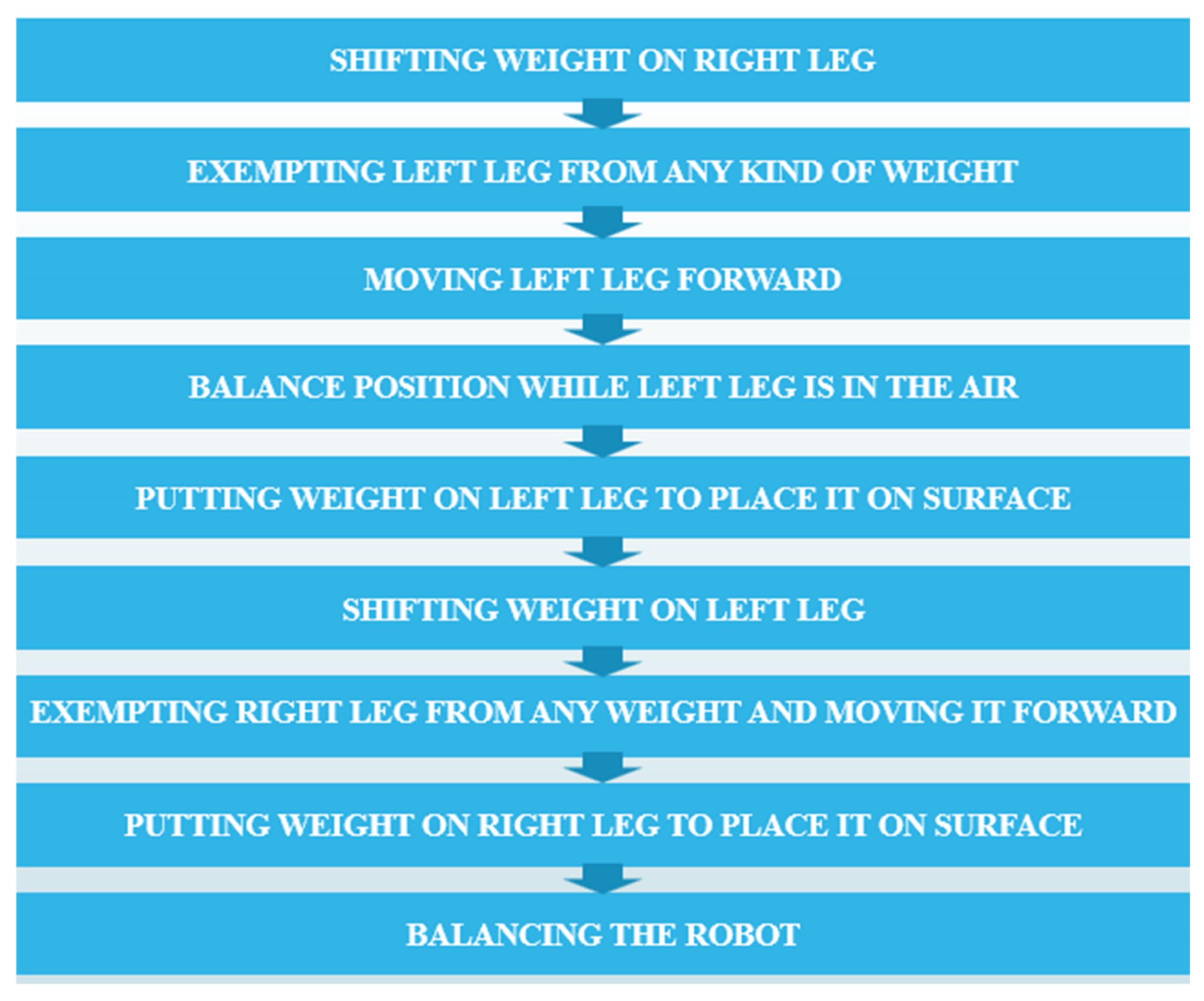
3. Implementation of Walking Algorithm
- PHASE 1: Initial contact as right foot just touches floor while left leg is at terminal stance.
- PHASE 2: Loading response as body weight is shifted to right leg and left leg is in pre-swing phase.
- PHASE 3: Mid-stance phase where left foot lifts until the weight of the body is distributed across the right (supporting) foot, whereas the left leg is in mid-swing phase.
- PHASE 4: Terminal stance as right heel moves upward and continues until left foot heel touches surface.
- PHASE 5: Toe-off where the left foot makes the first touch and the right toe-off follows. The weight of the body is transferred to the opposite limb.
- PHASE 6: When the right side foot is raised above the floor, the right leg begins to swing and stops when the currently swinging right foot is opposite the stance foot (left). The left leg is in the middle of its stride.
- PHASE 7: Following the first swing, the mid-swing continues until the right swinging leg is in front of the body, i.e., right leg advancement. The left leg is in the late middle of the stride.
- PHASE 8: The terminal swing begins when the right foot reaches the floor at the end of the mid-swing. This period ends with the progress of the limbs.
4. Conclusions and Future Direction
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hu, Y.; Mombaur, K. Bio-inspired optimal control framework to generate walking motions for the humanoid robot iCub using whole body models. Appl. Sci. 2018, 8, 278. [Google Scholar] [CrossRef] [Green Version]
- Adiprawita, W.; Hindersah, H.; Machbub, C. Center of Mass based Walking Pattern Generator with Gravity Compensation for Walking Control on Bioloid Humanoid Robot. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 18–21 November 2018. [Google Scholar]
- Putri, D.I.H.; Machbub, C. Gait controllers on humanoid robot using kalman filter and PD controller. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 18–21 November 2018. [Google Scholar]
- Piperakis, S.; Koskinopoulou, M.; Trahanias, P. Nonlinear state estimation for humanoid robot walking. IEEE Robot. Autom. Lett. 2018, 3, 3347–3354. [Google Scholar] [CrossRef] [Green Version]
- Huan, T.T.; Van Kien, C.; Anh, H.P.H.; Nam, N.T. Adaptive gait generation for humanoid robot using evolutionary neural model optimized with modified differential evolution technique. Neurocomputing 2018, 320, 112–120. [Google Scholar] [CrossRef]
- Zhang, B.; Shao, C.; Li, Y.; Tan, H.; Jiang, D. Dynamic simulation analysis of humanoid robot walking system based on ADAMS. J. Shanghai Jiaotong Univ. (Sci.) 2019, 24, 58–63. [Google Scholar] [CrossRef]
- Kim, M.; Lim, D.; Park, J. Online walking pattern generation for humanoid robot with compliant motion control. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Piperakis, S.; Timotheatos, S.; Trahanias, P. Unsupervised gait phase estimation for humanoid robot walking. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Dong, S.; Yuan, Z.; Yu, X.; Zhang, J.; Sadiq, M.T.; Zhang, F. On-line gait adjustment for humanoid robot robust walking based on divergence component of motion. IEEE Access 2019, 7, 159507–159518. [Google Scholar] [CrossRef]
- Chen, M.-L.; Chen, K.-J. Applying a stable dynamic walking mode of humanoid robot based on adaptive fuzzy control. In Proceedings of the 2019 IEEE Eurasia Conference on Biomedical Engineering, Healthcare and Sustainability (ECBIOS), Okinawa, Japan, 31 May–3 June 2019. [Google Scholar]
- Joe, H.-M.; Oh, J.-H. A robust balance-control framework for the terrain-blind bipedal walking of a humanoid robot on unknown and uneven terrain. Sensors 2019, 19, 4194. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- García, J.; Shafie, D. Teaching a humanoid robot to walk faster through Safe Reinforcement Learning. Eng. Appl. Artif. Intell. 2020, 88, 103360. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Luo, A.; Dutta, S.; Miura-Mattausch, M.; Mattausch, H.J. Force-sensor-based surface recognition with surface-property-dependent walking-speed adjustment of humanoid robot. IEEE Access 2020, 8, 169640–169651. [Google Scholar] [CrossRef]
- Maroger, I.; Stasse, O.; Watier, B. Walking human trajectory models and their application to humanoid robot locomotion. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 10 February 2021. [Google Scholar]
- Dutta, S.; Miura-Mattausch, M.; Ochi, Y.; Yorino, N.; Mattausch, H.J. Gyro-Sensor-Based Vibration Control for Dynamic Humanoid-Robot Walking on Inclined Surfaces. Sensors 2020, 20, 7139. [Google Scholar] [CrossRef] [PubMed]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Poonja, H.A.; Shah, M.S.A.; Uddin, R.; Kazmi, S.M.H.; Khan, H.; Ali, A.H.; Shirazi, M.A. Walking Algorithm Using Gait Analysis for Humanoid Robot. Eng. Proc. 2022, 20, 35. https://doi.org/10.3390/engproc2022020035
Poonja HA, Shah MSA, Uddin R, Kazmi SMH, Khan H, Ali AH, Shirazi MA. Walking Algorithm Using Gait Analysis for Humanoid Robot. Engineering Proceedings. 2022; 20(1):35. https://doi.org/10.3390/engproc2022020035
Chicago/Turabian StylePoonja, Hasnain Ali, Muhammad Soleman Ali Shah, Riaz Uddin, Syed Murtaza Hassan Kazmi, Humayun Khan, Abdullah Haider Ali, and Muhammad Ayaz Shirazi. 2022. "Walking Algorithm Using Gait Analysis for Humanoid Robot" Engineering Proceedings 20, no. 1: 35. https://doi.org/10.3390/engproc2022020035
APA StylePoonja, H. A., Shah, M. S. A., Uddin, R., Kazmi, S. M. H., Khan, H., Ali, A. H., & Shirazi, M. A. (2022). Walking Algorithm Using Gait Analysis for Humanoid Robot. Engineering Proceedings, 20(1), 35. https://doi.org/10.3390/engproc2022020035