
Feedback Linearization Control of Nonlinear System †

Abstract
:1. Introduction
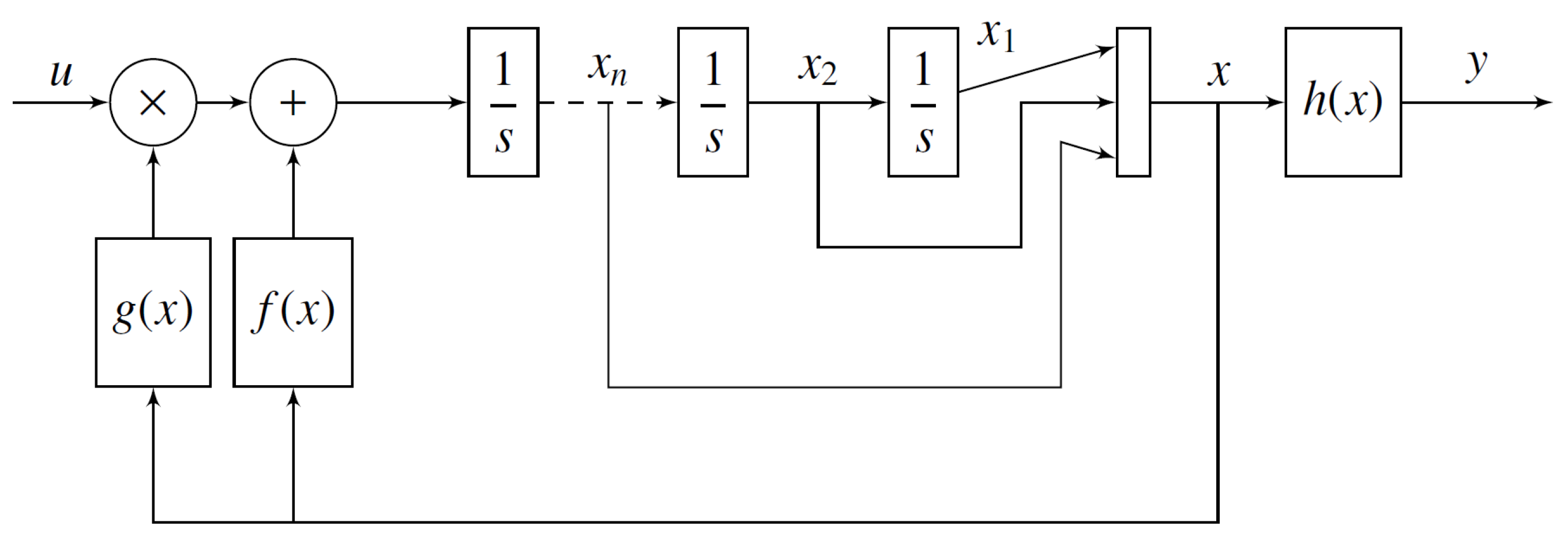
2. Brunovsky Canonical Form
- 1.
- There exists a known upper bound :
- 2.
- Function satisfies the condition:
3. Tracking Controller and Error Dynamics
4. Neural Networks for Approximating Functions
- a.
- The inequality restricting the state space vector is valid for the computed constants and : ;
- b.
- On any compact set, there are constants and that restrict the Euclidean norms of the approximated functions: .
5. Controller Structure
5.1. System with a Known Function
5.2. System with an Unknown Function
6. Modelling
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Charlet, B.; Lévine, J.; Marino, R. On dynamic feedback linearization. Syst. Control. Lett. 1989, 13, 143–151. [Google Scholar] [CrossRef]
- Ge, S.S.; Hang, C.C.; Lee, T.H.; Zhang, T. Stable Adaptive Neural Network Control; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Campion, G.; Bastin, G. Indirect adaptive state feedback control of linearly parameterized nonlinear systems. Int. J. Control Signal Proc. 1990, 4, 345–358. [Google Scholar] [CrossRef]
- Cui, R.; Yang, C.; Li, Y.; Sharma, S. Adaptive neural network control of AUVs with control input nonlinearities using reinforcement learning. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1019–1029. [Google Scholar] [CrossRef] [Green Version]
- Yesildirek, A.; Lewis, F.L. Feedback linearization using neural networks. Automatica 1995, 31, 1659–1664. [Google Scholar] [CrossRef]
- Hauser, J.; Sastry, S.; Kokotovic, P. Nonlinear control via approximate input-output linearization. IEEE Trans. Automat. Control 1989, 37, 392–398. [Google Scholar] [CrossRef]
- Krener, A.J. Feedback linearization. In Mathematical Control Theory; Baillieul, J., Willems, J.C., Eds.; Springer: New York, NY, USA, 1999; pp. 66–98. [Google Scholar]
- Lewis, F.W.; Jagannathan, S.; Yesildirak, A. Neural Network Control of Robot Manipulators and Non-Linear Systems; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Ge, S.S. Robust adaptive NN feedback linearization control of nonlinear systems. Int. J. Syst. Sci. 1996, 27, 1327–1338. [Google Scholar] [CrossRef]
- Demuth, H.; Beale, M.; Hagan, M. Neural Network Toolbox. For Use with MATLAB; The MathWorks Inc.: Natick, MA, USA, 1992. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Neural network controller: | |
| Robustifying Term: | |
| Neural network weight update law: | |
| Parameters: | |
| Signals: |
| Neural network controller: | |
| Robustifying Term: | |
| Neural network weight update laws: | |
| Signals: | |
| Parameters: |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trenev, I.S.; Devyatkin, D.D. Feedback Linearization Control of Nonlinear System. Eng. Proc. 2023, 33, 36. https://doi.org/10.3390/engproc2023033036
Trenev IS, Devyatkin DD. Feedback Linearization Control of Nonlinear System. Engineering Proceedings. 2023; 33(1):36. https://doi.org/10.3390/engproc2023033036
Chicago/Turabian StyleTrenev, Ivan Sergeevich, and Daniil Dmitrievich Devyatkin. 2023. "Feedback Linearization Control of Nonlinear System" Engineering Proceedings 33, no. 1: 36. https://doi.org/10.3390/engproc2023033036