
Cluttered Environment and Target Simulator to Evaluate Primary Surveillance Radar Processors †




Abstract
:1. Introduction
2. Materials and Methods
2.1. Simulator
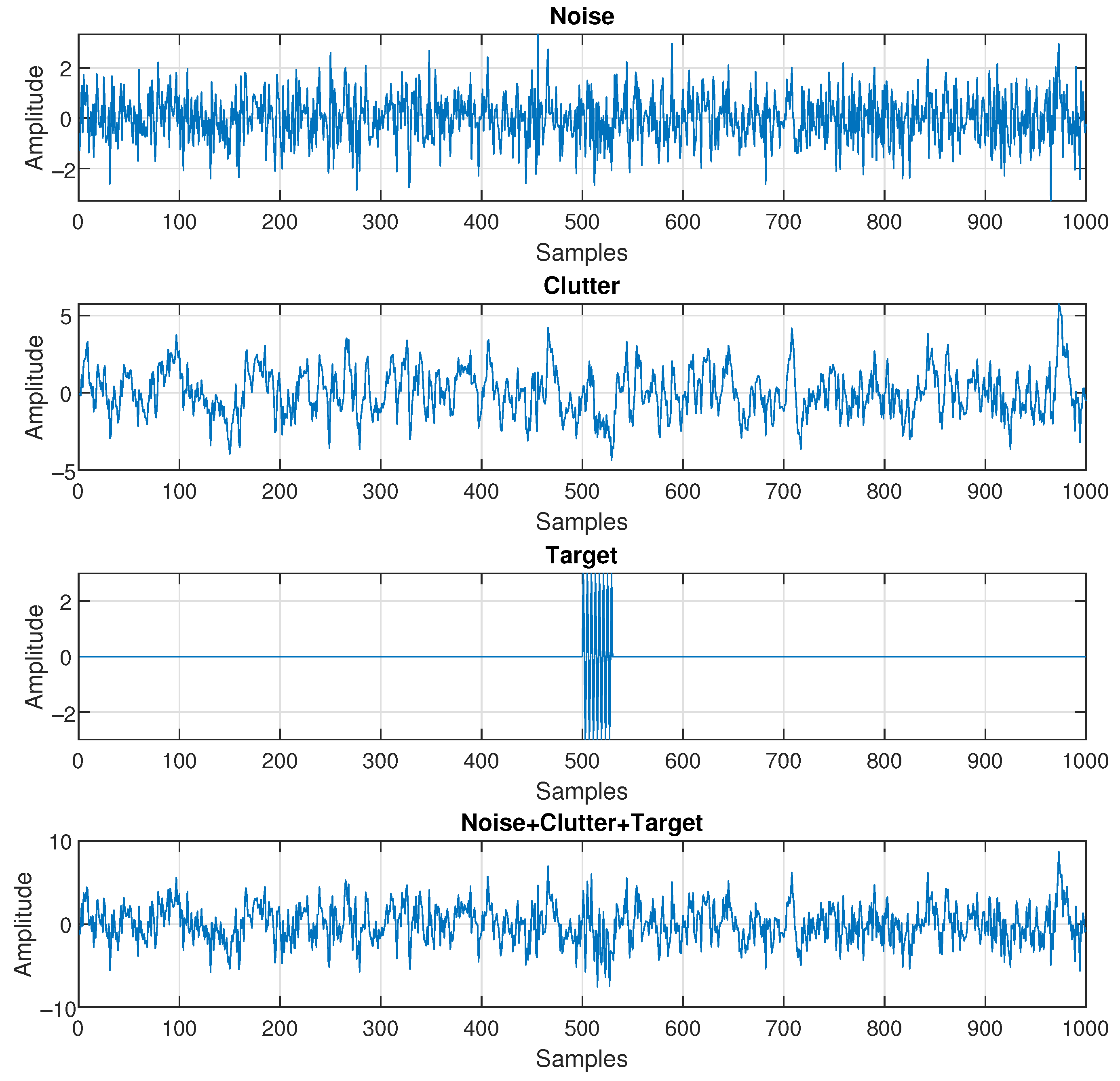
2.1.1. Clutter Model
2.1.2. Target Model
2.1.3. Integration of the System
2.2. Testing
Processors
3. Results and Discussion
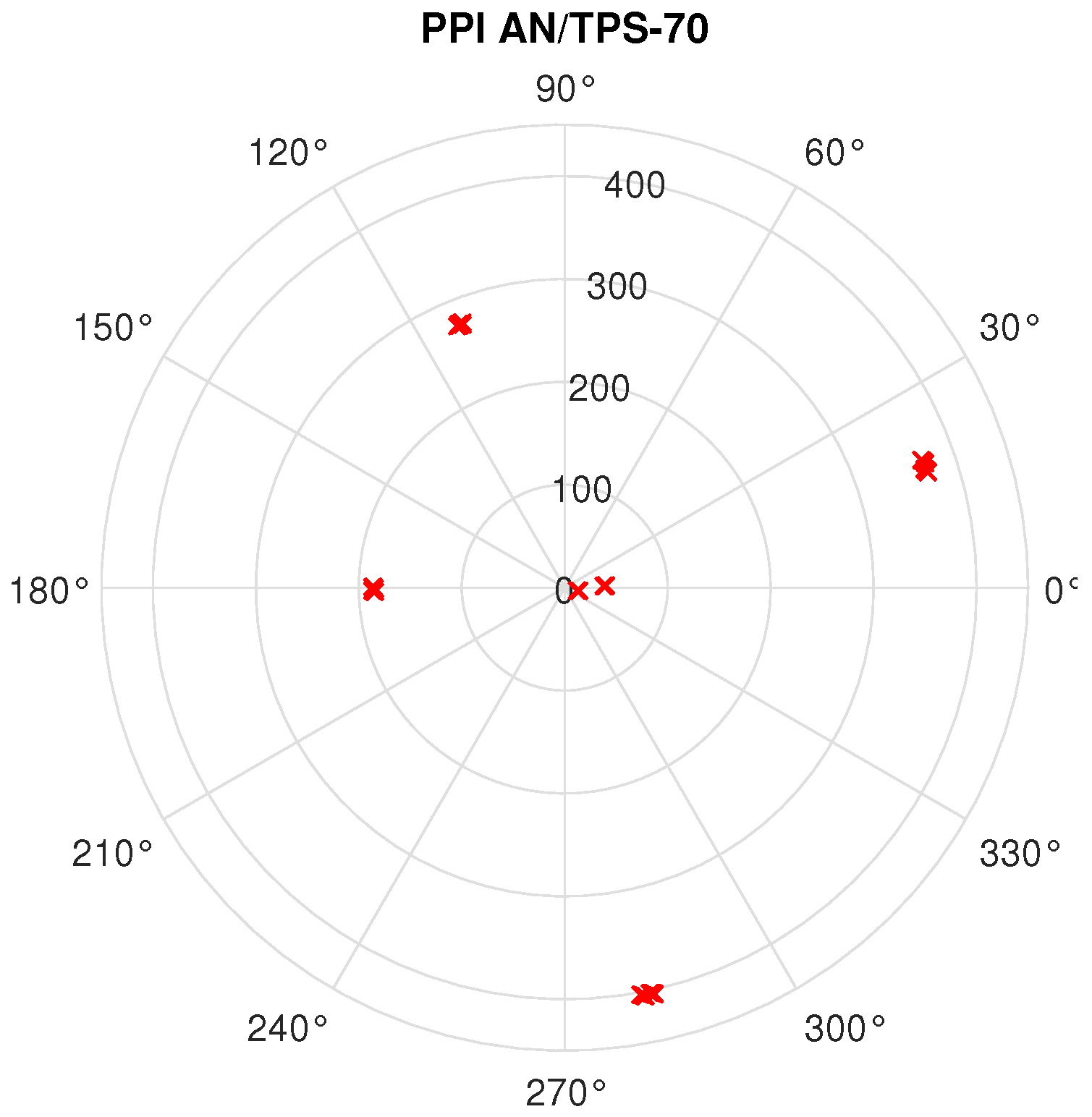
3.1. AN/TPS 70
3.2. Oerlikon Skyguard
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wellig, P.; Speirs, P.; Schuepbach, C.; Oechslin, R.; Renker, M.; Boeniger, U.; Pratisto, H. Radar systems and challenges for C-UAV. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018; IEEE: Piscataway Township, NJ, USA, 2018; pp. 1–8. [Google Scholar]
- Peacock, M.; Johnstone, M.N. Towards Detection and Control of Civilian Unmanned Aerial Vehicles. In Proceedings of the 14th Australian Information Warfare Conference, Perth, Australia, 2–4 December 2013; Edith Cowan University Security Research Institute: Perth, Australia; pp. 9–15. [Google Scholar]
- Skolnik, M.I. Radar Handbook; McGraw-Hill: New York, NY, USA, 1970. [Google Scholar]
- Farlik, J.; Kratky, M.; Casar, J.; Stary, V. Radar cross section and detection of small unmanned aerial vehicles. In Proceedings of the 2016 17th International Conference on Mechatronics-Mechatronika (ME), Prague, Czech Republic, 7–9 December 2016; pp. 1–7. [Google Scholar]
- Tomita, Y.; Irabu, T.; Kiuchi, E. Moving Target Indication Radar. US Patent 4,053,885, 28 December 1977. [Google Scholar]
- O’Donnell, R.; Muehe, C.; Labitt, M.; Drury, W.; Cartledge, L. Advanced signal processing for airport surveillance radars. In IEEE Electronic and Aerospace Systems Convention (EASCON’74); IEEE: Piscataway Township, NJ, USA, 1974; p. 71. [Google Scholar]
- Hyun, E.; Jin, Y.S.; Ju, Y.; Lee, J.H. Development of short-range ground surveillance radar for moving target detection. In Proceedings of the 2015 IEEE 5th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Singapore, 1–4 September 2015; IEEE: Piscataway Township, NJ, USA, 2015; pp. 692–695. [Google Scholar]
- Santi, F.; Pastina, D.; Bucciarelli, M. Maritime moving target detection technique for passive bistatic radar with GNSS transmitters. In Proceedings of the 2017 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017; IEEE: Piscataway Township, NJ, USA, 2017; pp. 1–10. [Google Scholar]
- Nag, S.; Barnes, M. A moving target detection filter for an ultra-wideband radar. In Proceedings of the 2003 IEEE Radar Conference (Cat. No. 03CH37474), Huntsville, AL, USA, 8 May 2003; IEEE: Piscataway Township, NJ, USA, 2003; pp. 147–153. [Google Scholar]
- Carrera, E.V.; Lara, F.; Ortiz, M.; Tinoco, A.; León, R. Target detection using radar processors based on machine learning. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020; IEEE: Piscataway Township, NJ, USA, 2020; pp. 1–5. [Google Scholar]
- Yuan, Y.; Yi, W.; Hoseinnezhad, R.; Varshney, P.K. Robust power allocation for resource-aware multi-target tracking with colocated MIMO radars. IEEE Trans. Signal Process. 2020, 69, 443–458. [Google Scholar] [CrossRef]
- Shi, Z.; Wang, H.; Leung, C.S.; So, H.C.; Eurasip, M. Robust MIMO radar target localization based on lagrange programming neural network. Signal Process. 2020, 174, 107574. [Google Scholar] [CrossRef]
- Haynes, J.M.; Marchand, R.T.; Luo, Z.; Bodas-Salcedo, A.; Stephens, G.L. A multipurpose radar simulation package: QuickBeam. Bull. Am. Meteorol. Soc. 2007, 88, 1723–1728. [Google Scholar] [CrossRef]
- Kärnfelt, C.; Péden, A.; Bazzi, A.; Shhadé, G.E.H.; Abbas, M.; Chonavel, T. 77 GHz ACC radar simulation platform. In Proceedings of the 2009 9th International Conference on Intelligent Transport Systems Telecommunications, (ITST), Lille, France, 20–22 October 2009; IEEE: Piscataway Township, NJ, USA, 2009; pp. 209–214. [Google Scholar]
- Vishwakarma, S.; Li, W.; Tang, C.; Woodbridge, K.; Adve, R.; Chetty, K. SimHumalator: An open-source end-to-end radar simulator for human activity recognition. IEEE Aerosp. Electron. Syst. Mag. 2021, 37, 6–22. [Google Scholar] [CrossRef]
- Rosenberg, L.; Watts, S.; Bocquet, S. Scanning radar simulation in the maritime environment. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; IEEE: Piscataway Township, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Schvartzman, D.; Curtis, C.D. Signal processing and radar characteristics (SPARC) simulator: A flexible dual-polarization weather-radar signal simulation framework based on preexisting radar-variable data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 12, 135–150. [Google Scholar] [CrossRef]
- Hernangómez, R.; Visentin, T.; Servadei, L.; Khodabakhshandeh, H.; Stańczak, S. Improving Radar Human Activity Classification Using Synthetic Data with Image Transformation. Sensors 2022, 22, 1519. [Google Scholar] [CrossRef]
- Rahman, H. Fundamental Principles of Radar; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Lara, F.; Ortiz, M.; Carrera, E.V.; Tinoco, A.F.; Moya, H.; León, R. Bayesian Processors of Radar Signals for the Skyguard Radar System of the Ecuadorian Army. IEEE Lat. Am. Trans. 2021, 20, 153–161. [Google Scholar] [CrossRef]
- Mansouri, H.; Hamadouche, M.; Ettoumi, F.Y.; Magaz, B. Performance analysis of a Weighted Max CFAR processor. In Proceedings of the 2008 International Radar Symposium, Wroclaw, Poland, 21–23 May 2008; IEEE: Piscataway Township, NJ, USA, 2008; pp. 1–4. [Google Scholar]
- Wang, S.; He, P. Research on Low Intercepting Radar Waveform Based on LFM and Barker Code Composite Modulation. In Proceedings of the 2018 International Conference on Sensor Networks and Signal Processing (SNSP), Xi’an, China, 28–31 October 2018; pp. 297–301. [Google Scholar] [CrossRef]
- Pike, J. AN/TPS-70. Federation of American Scintists, Military Analysis Network. 1999. Available online: https://man.fas.org/dod-101/sys/ac/equip/an-tps-70.htm (accessed on 1 September 2023).
- Lara, F.; Ortiz, M.; Carrera, E.V.; Tinoco, A.; León, R. Filtros adaptativos en el procesador bayesiano mti (moving target indicator) para el sistema de radar skyguard del ejército ecuatoriano. Revista Ibérica de Sistemas e Tecnologias de Informaçao 2020, E29, 650–664. (In Spanish) [Google Scholar]
- Turyn, R. Four-phase Barker codes. IEEE Trans. Inf. Theory 1974, 20, 366–371. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Number | Range (km) | Azimuth (rad) | Integration Pulse |
|---|---|---|---|
| 1 | 8 | ||
| 2 | 12 | ||
| 3 | 7 | ||
| 4 | 5 | ||
| 5 | 10 | ||
| 6 | 9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lara, F.; Mena, R.; Flores, A.; Grijalva, F.; Lara-Cueva, R. Cluttered Environment and Target Simulator to Evaluate Primary Surveillance Radar Processors. Eng. Proc. 2023, 47, 14. https://doi.org/10.3390/engproc2023047014
Lara F, Mena R, Flores A, Grijalva F, Lara-Cueva R. Cluttered Environment and Target Simulator to Evaluate Primary Surveillance Radar Processors. Engineering Proceedings. 2023; 47(1):14. https://doi.org/10.3390/engproc2023047014
Chicago/Turabian StyleLara, Fernando, Ricardo Mena, Antonio Flores, Felipe Grijalva, and Roman Lara-Cueva. 2023. "Cluttered Environment and Target Simulator to Evaluate Primary Surveillance Radar Processors" Engineering Proceedings 47, no. 1: 14. https://doi.org/10.3390/engproc2023047014
APA StyleLara, F., Mena, R., Flores, A., Grijalva, F., & Lara-Cueva, R. (2023). Cluttered Environment and Target Simulator to Evaluate Primary Surveillance Radar Processors. Engineering Proceedings, 47(1), 14. https://doi.org/10.3390/engproc2023047014