1. Introduction
The declaration of the Initial Service phase for the High Accuracy Service (HAS) on 24 January 2023 marked a significant milestone in the democratization of high-precision GNSS capabilities for users worldwide [
1]. This service, provided free of charge, is globally accessible via a signal in space (corrections are transmitted through the E6-B signal) and via an internet connection (corrections are also available through an NTRIP Caster available by registration). Due to its extensive coverage and cost-free nature, the stakeholders within the sector are likely to show considerable interest in implementing the use of this service to enhance the performance of their solutions. This encompasses receiver manufacturers, who may be interested in offering fully integrated solutions with HAS capabilities, as well as end-users, who may seek software positioning solutions compatible with the Galileo HAS service.
Considering this high potential interest of the users, GMV has developed a HAS Position Engine that is able to exploit all the potential of the HAS service. This paper presents the GMV’s HAS Position Engine, including an overview of the software, together with results in real conditions under different scenarios. It ends with the conclusions of the product and the possibilities that are offered.
2. GMV’S HAS Position Engine Overview
The GMV’s HAS Position Engine is a software library designed to integrate a Precise Point Positioning (PPP) solution together with the decoding and application of Galileo HAS corrections. This engine can operate in real time, utilizing GMV’s Real Time wrapper, or can be integrated by users into their own platforms. This integration is facilitated through an API, which allows data loading, configuration of some parameters, and retrieval of high-accuracy positioning output.
The GMV’s HAS Position Engine supports multiple formats for observations and navigation, including RTCM, SBF, and u-Blox. Additionally, it is equipped to retrieve raw navigation pages containing E6 data using the GalRawCNAV SBF message.
The PPP solution of the GMV’s HAS Position Engine is based on the GMV GSHARP [
2] PPP implementation, which also includes some advanced features such as IAR (Integer Ambiguity Resolution), compatibility with ionospheric corrections, and integrity features. In addition, the GMV’s HAS Position Engine includes a tight-coupling integration with six-axis IMU measurements, which provides dead-reckoning features. The integration with IMU measurements is optional, so the users can benefit from this integration in setups where there is an IMU available, but they are not limited to setups with an IM. This complete implementation is designed for efficiency, being both single-threaded and lightweight in terms of CPU consumption and memory usage, capable of running at 10 Hz on low-end processors while keeping RAM consumption below 80 MB.
Figure 1 provides a high-level overview of the GMV’s HAS Position Engine library’s architecture. Components in red are the main components of the GMV’s HAS Position Engine, which are the HAS decoder and the GSHARP Kalman Filter to compute the positioning. Components in grey are supporting components and white boxes provide a description of the information flow that is represented by each arrow. The users have several options to integrate the GMV’s HAS Position Engine. They can use a standalone version, which also manages the communication channels for input acquisition (compatible with TCP, NTRIP, and Serial communication), or the client can integrate only the GMV’s HAS Position Engine library and manage the communication channels by their own means for a higher level of integration.
Once the inputs are loaded into the library, the processing begins. The Galileo CNAV pages are accumulated and decoded as soon as the necessary preconditions for applying the Reed–Solomon algorithm from the HAS are met [
3]. In the first step of the process, GNSS observations and IMU measurements are decoded and synchronized. Subsequently, a set of input monitors preprocesses and checks the measurements for anomalies (high noise, jumps, cycle slips, etc.) before they are introduced into the GSHARP Kalman Filter. The Corrections Manager applies the HAS corrections to the navigation messages and manages all the physical models used to compute the residuals for the Kalman Filter. Ultimately, the Kalman Filter takes the preprocessed measurements from the IMU and the GNSS receiver, along with the information supplied by the Corrections Manager, to compute a High Accuracy Solution.
3. Performance Analysis
This section provides an assessment of the performance of GMV’s HAS Position Engine under various scenarios. We will outline the specific test setups employed and present the results obtained. Furthermore, a comparative analysis with state-of-the-art positioning alternatives is conducted to highlight both the strengths and limitations of GMV’s HAS Position Engine.
3.1. Performance Analysis in Static Scenarios
The starting point of the performance analysis will be the static scenarios. In these scenarios, the setup that has been used is based on the GMV’s GGRN (Global GNSS Reference Network). The GMV’s GGRN is a private network of GNSS reference stations that is composed of 40 redundant stations with multi-constellation and multifrequency support with a stable timing reference thanks to Atomic Frequency Standards [
4]. The distribution of the stations around the globe and the typical setup of the antenna and the environment of the stations are provided in
Figure 2.
Observations, decoded navigation data, and raw E6 navigation pages were collected through an NTRIP caster to feed the GMV’s HAS Position Engine in real time for the static tests. This information was obtained using the RTCM protocol for observations and decoded navigation messages (messages 1019, 1045, 1077, and 1097), while the raw navigation pages were acquired using the SBF format (GalRawCNAV message).
Previous analyses performed with a subset of GMV GGRN have shown the performance of the Galileo HAS using the GMV’s HAS Position Engine during the HAS System Validation phase [
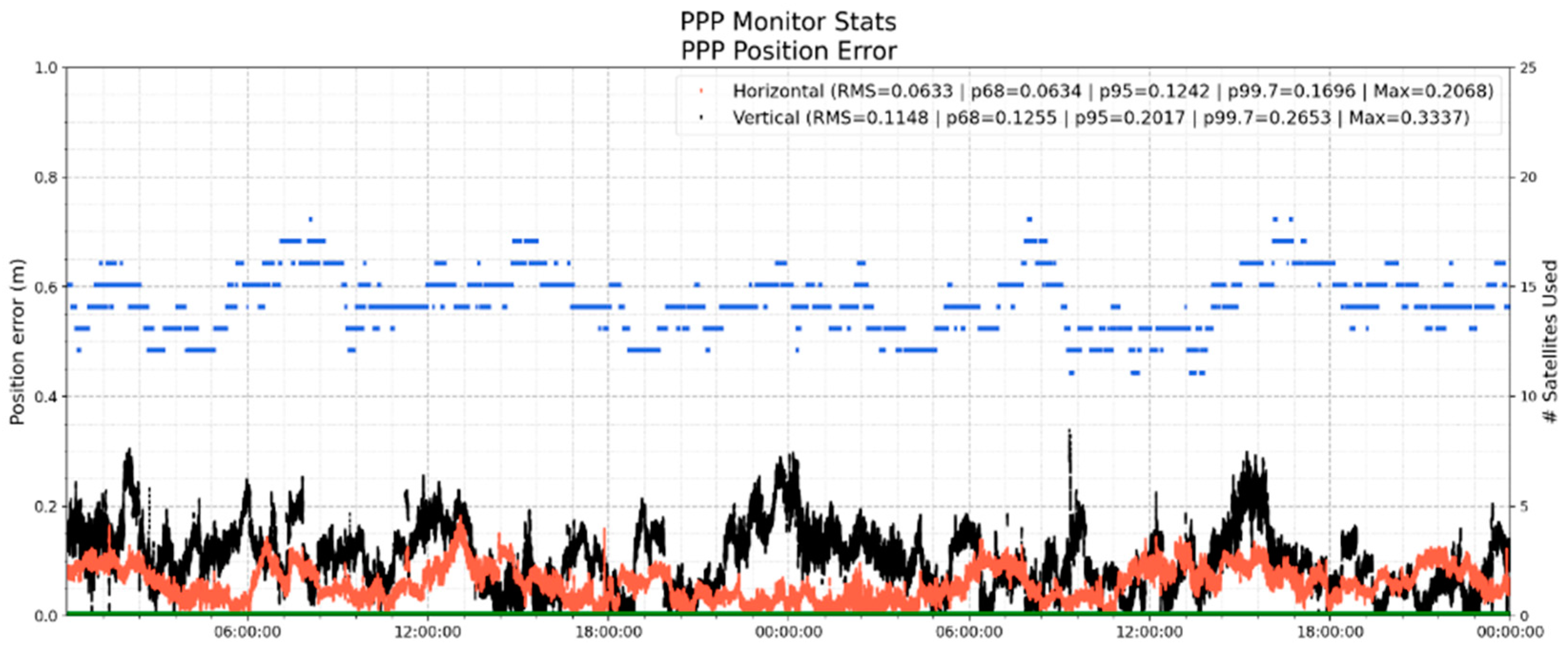
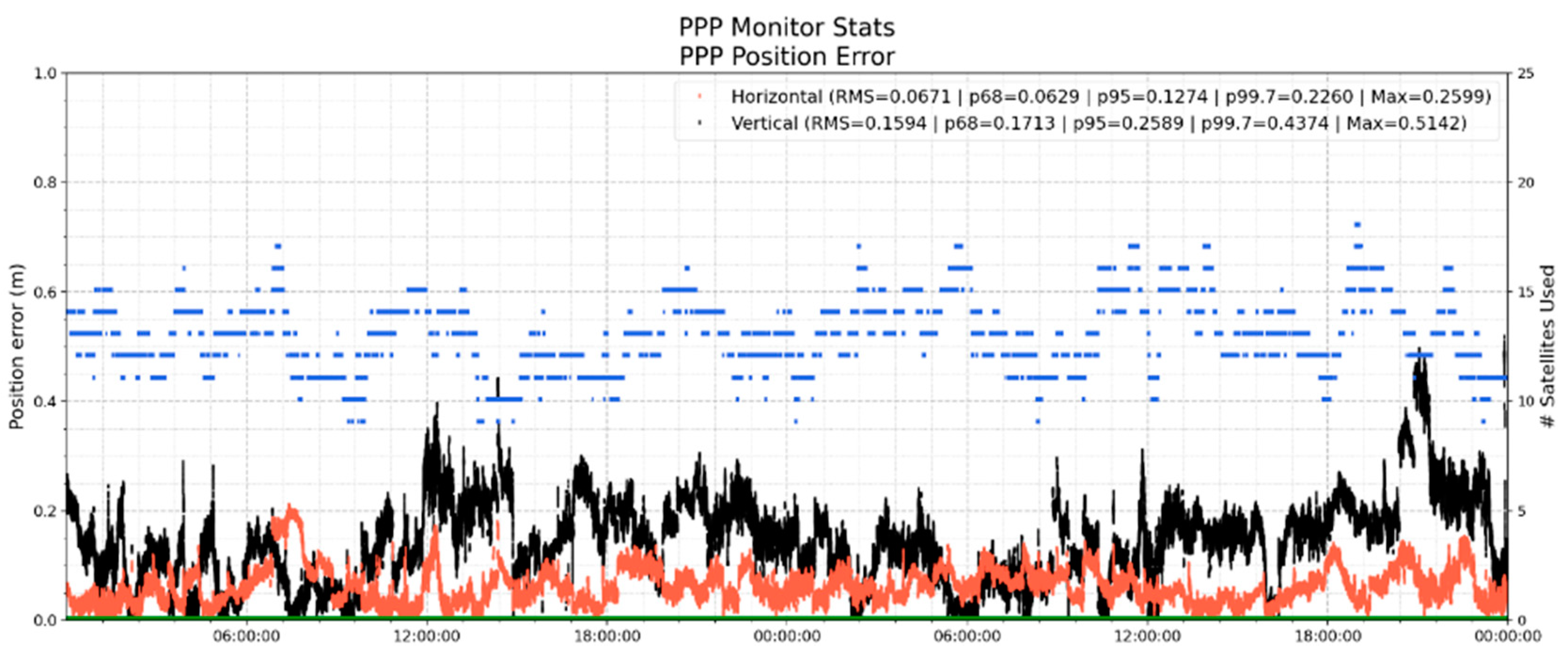
5]. Nowadays, the HAS is currently operational in a remarkable way and the results and conclusions of that paper have been consistent during the Initial Service phase. Therefore, for the sake of simplicity, in this case, results from only two of the stations (one of them in Spain (station code: SPTR) and the other in the USA (station code: USNA)) of the network will be shown. The results presented consist of 48 h of continuous running and they have been extracted from longer runs to show the results after the convergence period because for a static user, this is the most interesting figure and including the convergence period can lead to misleading results in this use case. For reference, the typical convergence time for a static PPP scenario using HAS corrections is around 30 min. The horizontal and vertical positioning errors of these tests, together with the number of satellites that are used at every moment (blue line represents the number of satellites which are being used and green line represents the number of satellites used by the Ambiguity Fixing algorithm, which is only available for GMV correction scenario used as reference), are shown in
Figure 3 and
Figure 4. The RMS and 95th percentile of the results have been collected in
Table 1 and
Table 2 to summarize the results from the previous figures.
3.2. Performance Analysis in Kinematic Scenarios
The second scenario that will be shown is a kinematic scenario. The setup and the route that has been followed are described and then the results are presented.
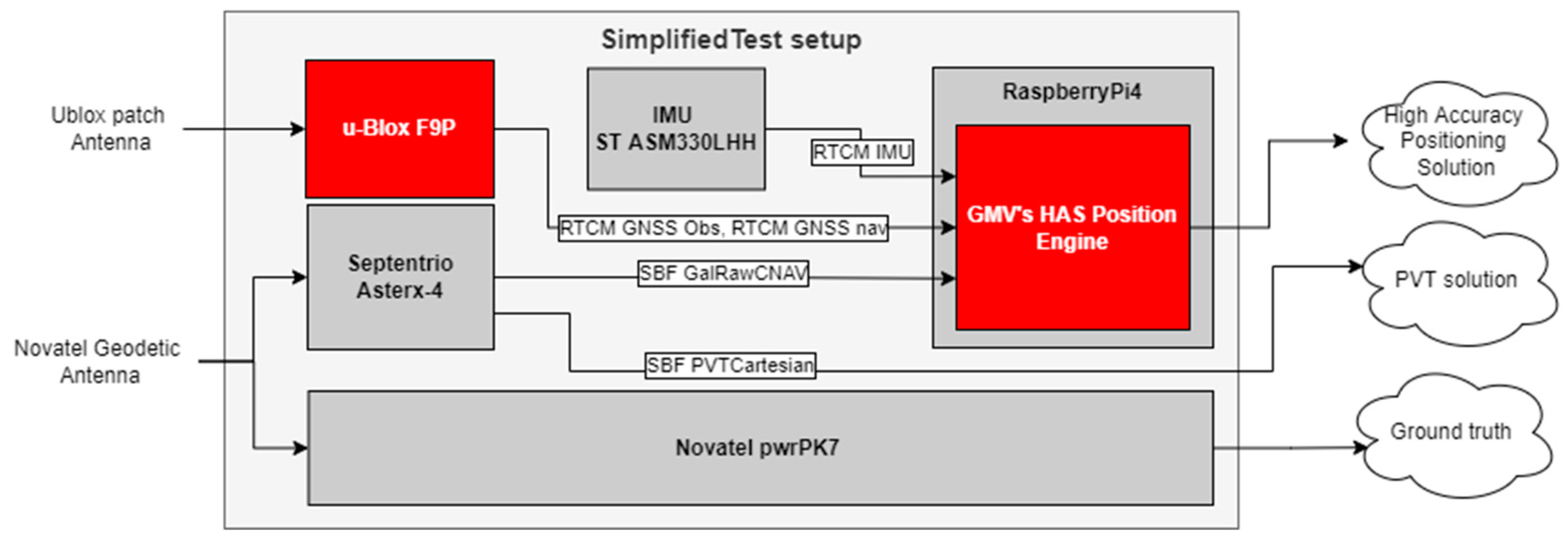
The setup used is based on a Ublox F9P and an Asterx-4 Septentrio receiver. Other components of the setup are a RaspberryPi 4, where the GMV’s HAS Position Engine is installed, an automotive grade IMU from ST Electronics (ASM330LHH), and a Novatel PwrPak7 for obtaining the ground truth. A schematic view of the setup can be found in
Figure 5. Regarding communication, the u-blox F9P is connected via USB to the RaspberryPi and transmits RTCM messages, the IMU uses the I2C protocol and uses RTCM proprietary messages to send the IMU measurements to the RaspberryPi, and the Septentrio Asterx-4 is connected via ethernet to the RaspberryPi and transmits the raw E6 navigation pages using the GalRawCNAV SBF message. In this case, the rate of GNSS observations is 10 Hz, which is a more suitable rate for automotive or similar use cases.
The reason behind using two GNSS receivers is that the usage of a mass-market receiver together with a mass-market antenna has been preferred over a high-end setup in order to deepen the assessment of the possibilities of democratization of the high-accuracy solutions for the growth of this market that has been forecasted [
6]. However, nowadays there are not many mass-market receivers that can track the E6 signal for obtaining the HAS corrections yet, and a high-end receiver has been used for this purpose only (another equivalent setup would be to use the mass-market receiver and obtain the HAS corrections from the HAS ground NTRIP Caster from GSC). Showing the results that are obtained with this kind of receiver together with HAS corrections could be an interesting input for the market to assess the possibilities of increasing the offer of mass-market-grade receivers with E6 capabilities.
The route, illustrated in
Figure 6, commenced at GMV premises and consisted of a ~40 min journey from 07:33 UTC to 08:16 UTC along the M-607 highway and within the city of Tres Cantos (Madrid). The majority of the environment was under highway conditions and the last part of the scenario (from 08:06 UTC) to the end of the scenario can be considered mid-urban conditions.
Figure 7 shows an example of the environmental conditions that are found in the mid-urban conditions.
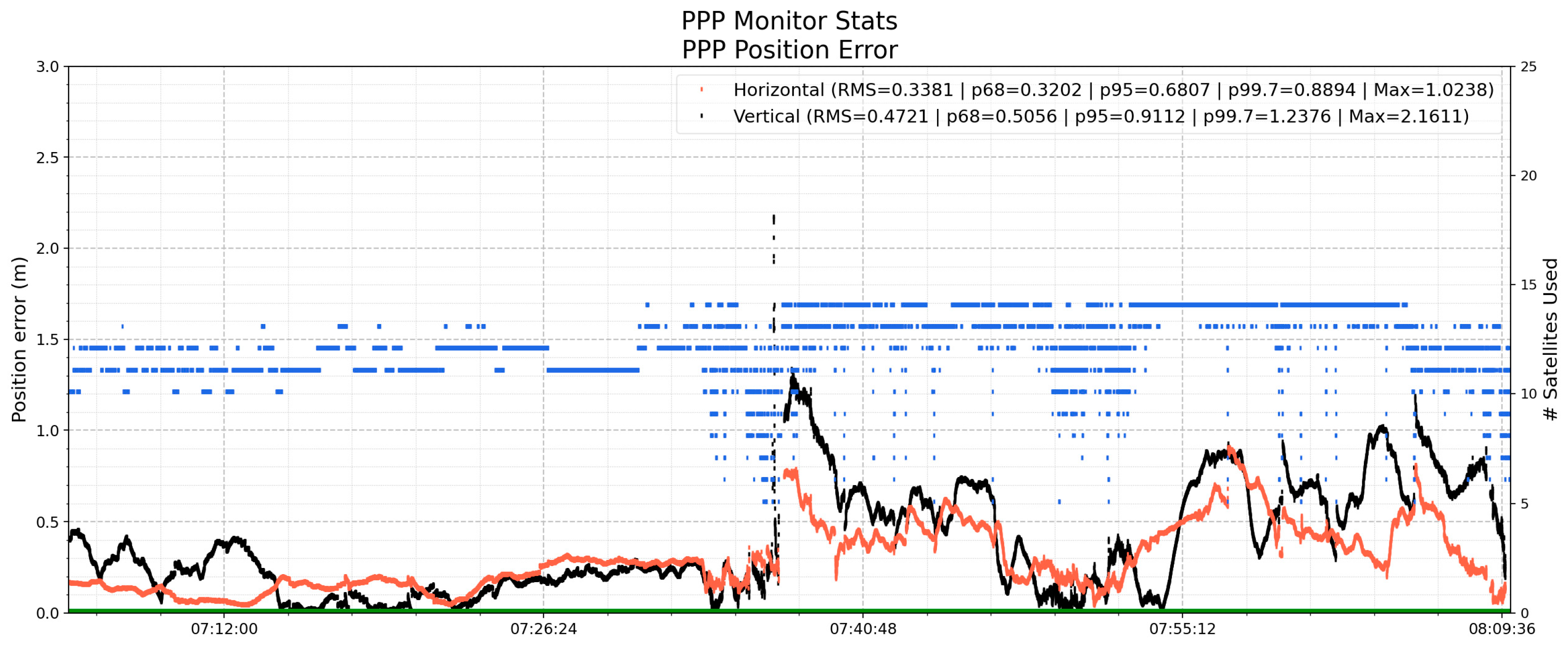
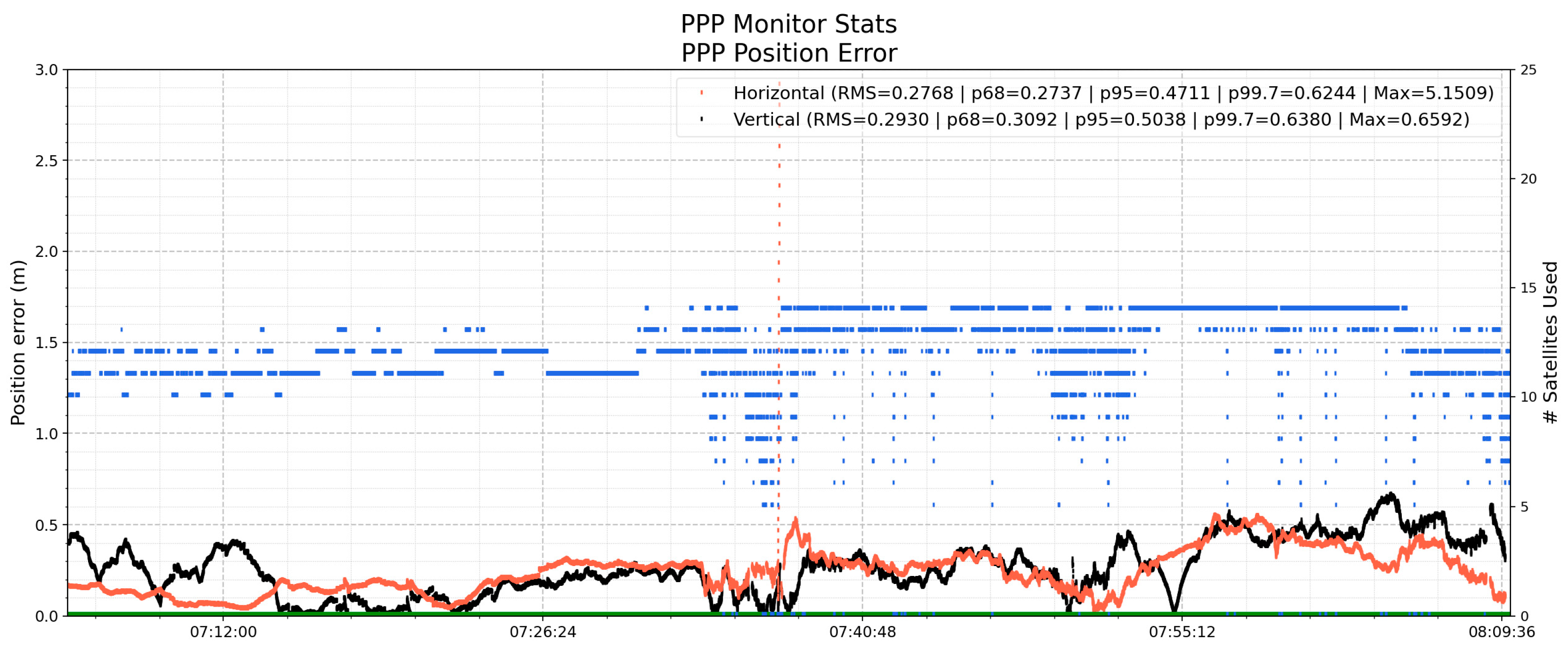
The positioning error of the GMV’s Position Engine, operating with HAS corrections and a Ublox F9P receiver, is depicted in
Figure 8. Performance degradation at ~07:36:30 is caused by a reconvergence due to a GNSS outage caused by a street with dense foliage.
3.3. Performance in Kinematic Scenarios Using IMU Hybridization
In addition to GNSS-only scenarios, we also assessed the performance of GMV’s HAS Position Engine using Inertial Measurement Unit (IMU) hybridization to enhance the positioning solution. The GMV’s HAS Position Engine implements a tightly coupled IMU hybridization that provides dead-reckoning capabilities and also helps to mitigate some of the discontinuities that are observed in the GNSS-only solutions. As can be seen in
Figure 9, the positioning error is smoother in this case and the performance is generally improved. As you can see, the Galileo HAS can be complemented with other sensors for obtaining synergies and better overall performance.
3.4. Comparison with Other State-of-the-Art Solutions
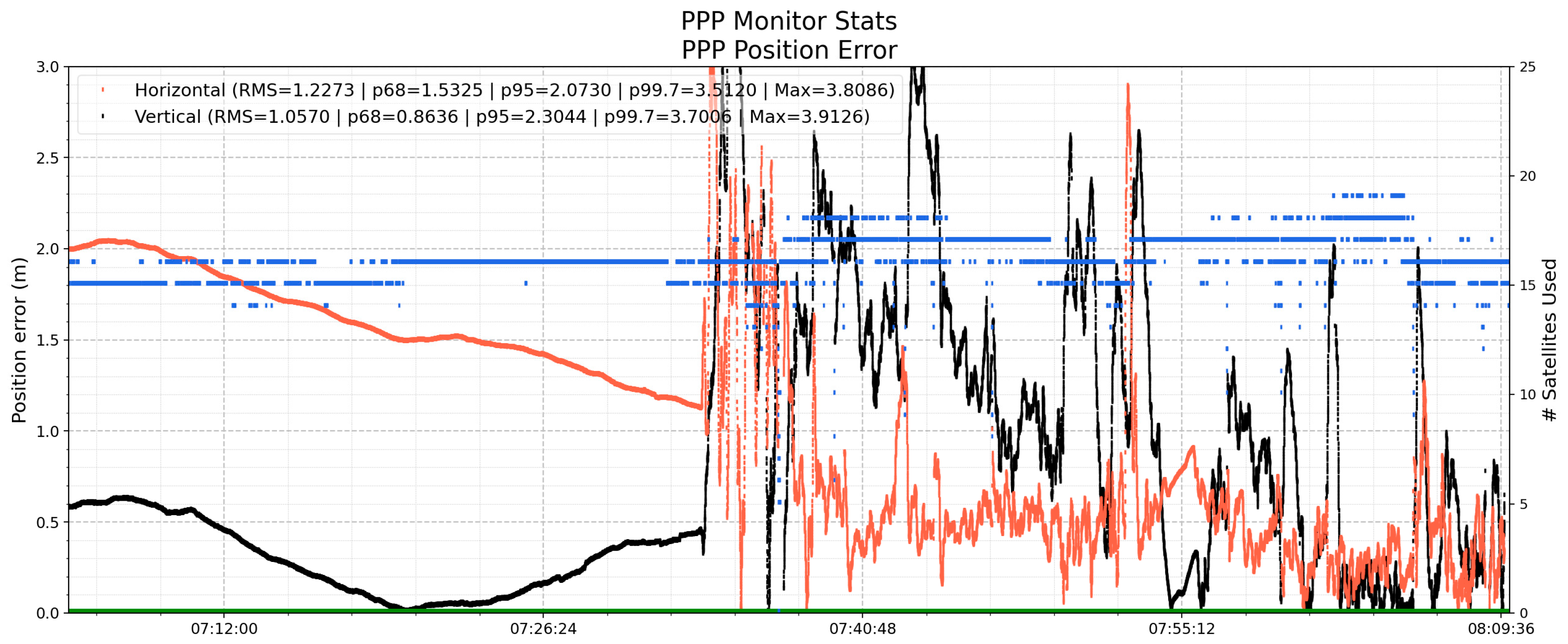
The results from the previous scenarios can be complemented with a comparison with other state-of-the-art solutions. This comparison can help interpret and extract conclusions about the performance of the GMV HAS Position Engine. Two different solutions have been selected for this comparison:
Asterx-4 PVT: This solution was selected for comparison with a state-of-the-art standalone PVT solution using a commercial receiver.
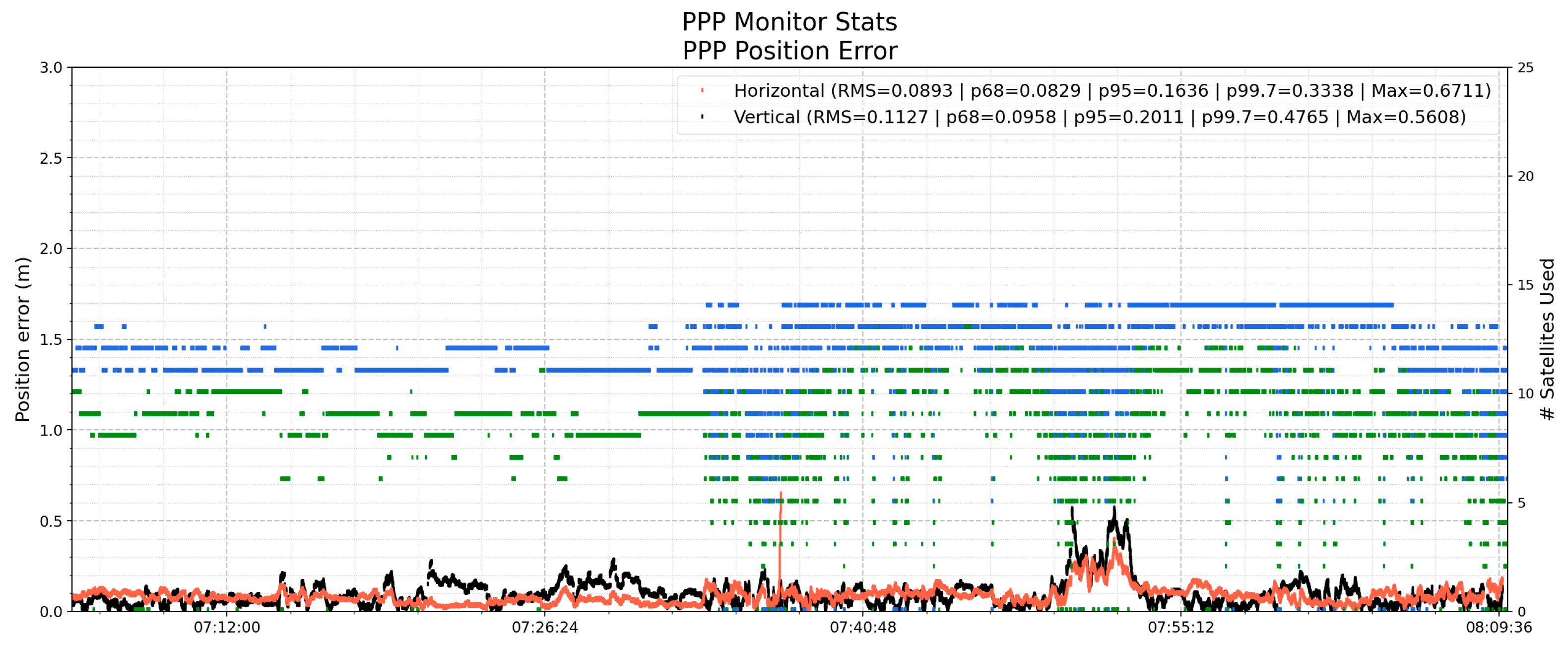
GSHARP solution: This solution was selected for comparison with another high-accuracy solution. In this case, in addition to the orbit, clocks, and code biases, ionospheric corrections and phase biases are also available. This allows the implementation of additional techniques such as Integer Ambiguity Resolution to obtain better accuracy figures and to highly reduce the convergence time. However, an internet connection is needed to receive the corrections.
The results using these two solutions together are provided in
Figure 10 and
Figure 11, respectively. In addition, a comparison collecting the results from all the kinematic scenarios has been added in
Table 3 and
Table 4.
4. Conclusions
This paper has introduced and evaluated the performance of GMV’s HAS Position Engine under various static and kinematic scenarios. The findings highlight that the GMV’s HAS Position Engine delivers high-accuracy solutions under these conditions.
From the user perspective, the benefits of using Galileo HAS in conjunction with applications like GMV’s HAS Position Engine are remarkable. This is due to the improved accuracy it provides when compared with other standalone solutions that are commonplace in commercial applications. Moreover, the standalone nature of the Galileo HAS and GMV’s HAS Position Engine is an added advantage as it liberates users from dependency on an internet connection, which can be a limited factor for certain applications or setups. On the other hand, it is important to acknowledge the current limitation that the availability of the E6 signal poses for a significant proportion of mass-market receivers, with wide availability currently confined to high-end receivers.
For applications with more demanding accuracy or convergence time requirements, advanced commercial solutions such as GMV’s GSHARP, which include additional features like ionospheric corrections and Integer Ambiguity Resolution, are necessary to reach the desired performance level.
In conclusion, the Galileo HAS, together with the GMV’s HAS Position Engine, can offer significant advantages to users for a number of applications. Nowadays, the users who can benefit from using E6-capable receivers can adopt this kind of solution in a standalone way, but mass-market applications can also benefit from using the HAS corrections via the NTRIP caster.
Author Contributions
Conceptualization, A.C., S.C. and J.D.C.; methodology, A.C. and S.C. and J.D.C.; software, A.C., S.C. and J.R.; validation, A.C.; formal analysis, A.C. and J.D.C.; investigation, A.C.; resources, J.D.C.; data curation, A.C.; writing—original draft preparation, A.C.; writing—review and editing, A.C. and J.D.C.; visualization, A.C.; supervision, J.D.C. and S.C.; project administration, J.D.C.; funding acquisition, J.D.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data sharing is not applicable to this article.
Conflicts of Interest
All the authors were employed by the company GMV.
References
- European GNSS Service Centre. Galileo High Accuracy Service. Available online: https://www.gsc-europa.eu/galileo/services/galileo-high-accuracy-service-has (accessed on 28 October 2023).
- GMV GSHARP. GMV. Available online: https://www.gmv.com/en/products/space/gmv-gsharp (accessed on 28 October 2023).
- European Union. Galileo HAS SIS ICD; Issue 1.0; European Union: Brussels, Belgium, 2022. [Google Scholar]
- Global GNSS network data provision service. GMV. Available online: https://magicgnss.gmv.com/magicGNSS_Reference_Network.pdf (accessed on 28 October 2023).
- Chamorro, A.; Cancela, S.; García, A.J.; Calle, D.; Fernandez-Hernandez, I.; de Blas, F.J.; Vazquez, J.; Hernández, C.; Fernandez-Hernandez, I. Early Demonstration of Galileo HAS User Performances. In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022. [Google Scholar]
- EUSPA. EUSPA EO and GNSS Market Report. 2022. Available online: https://www.euspa.europa.eu/sites/default/files/uploads/euspa_market_report_2022.pdf (accessed on 28 October 2023).
Figure 1.
GMV’s HAS Position Engine overview.
Figure 1.
GMV’s HAS Position Engine overview.
Figure 2.
(a) GMV’s network of GNSS stations; (b) typical GMV GGRN station environment.
Figure 2.
(a) GMV’s network of GNSS stations; (b) typical GMV GGRN station environment.
Figure 3.
Results of a 48 h continuous run (9 May 2023 and 10 May 2023) with the GMV’s HAS Position Engine in a GMV GGRN station in Madrid (Spain).
Figure 3.
Results of a 48 h continuous run (9 May 2023 and 10 May 2023) with the GMV’s HAS Position Engine in a GMV GGRN station in Madrid (Spain).
Figure 4.
Results of a 48 h continuous run (9 May 2023 and 10 May 2023) with the GMV’s HAS Position Engine in a GMV GGRN station in New Jersey (U.S.A.).
Figure 4.
Results of a 48 h continuous run (9 May 2023 and 10 May 2023) with the GMV’s HAS Position Engine in a GMV GGRN station in New Jersey (U.S.A.).
Figure 5.
Test setup for the kinematic scenarios. Red boxes are the main components of the setup (mass-market receiver and GMV’s software), grey boxes are the supporting components for the study (IMU for hybridization test, Septentrio Asterx as reference receiver and E6 pages recording, ground truth system and Raspberry Pi as processing unit for the GMV software) and white boxes represent the information flow details including its format.
Figure 5.
Test setup for the kinematic scenarios. Red boxes are the main components of the setup (mass-market receiver and GMV’s software), grey boxes are the supporting components for the study (IMU for hybridization test, Septentrio Asterx as reference receiver and E6 pages recording, ground truth system and Raspberry Pi as processing unit for the GMV software) and white boxes represent the information flow details including its format.
Figure 6.
Highway and semi-urban kinematic trajectory.
Figure 6.
Highway and semi-urban kinematic trajectory.
Figure 7.
Google Street View of one of the streets of the kinematic scenarios (Tres Cantos).
Figure 7.
Google Street View of one of the streets of the kinematic scenarios (Tres Cantos).
Figure 8.
Positioning error of the GMV’s HAS Position Engine using HAS corrections and observations from u-Blox F9P receiver (9 May 2023).
Figure 8.
Positioning error of the GMV’s HAS Position Engine using HAS corrections and observations from u-Blox F9P receiver (9 May 2023).
Figure 9.
Positioning error of the GMV’s HAS Position Engine using HAS corrections, observations from u-Blox F9P receiver, and IMU hybridization (9 May 2023).
Figure 9.
Positioning error of the GMV’s HAS Position Engine using HAS corrections, observations from u-Blox F9P receiver, and IMU hybridization (9 May 2023).
Figure 10.
Positioning error of the Asterx-4 standalone PVT solution (9 May 2023).
Figure 10.
Positioning error of the Asterx-4 standalone PVT solution (9 May 2023).
Figure 11.
GMV’s GSHARP Solution (9 May 2023). Green line indicates the number of fixed satellites by the Integer Ambiguity Resolution algorithm.
Figure 11.
GMV’s GSHARP Solution (9 May 2023). Green line indicates the number of fixed satellites by the Integer Ambiguity Resolution algorithm.
Table 1.
RMS of positioning error for the static scenarios of the two stations considered (SPTR: Madrid, Spain; USNA: New Jersey, U.S.A.).
Table 1.
RMS of positioning error for the static scenarios of the two stations considered (SPTR: Madrid, Spain; USNA: New Jersey, U.S.A.).
| Errors RMS (cm) | Horizontal | Vertical |
|---|
| SPTR | 6.3 | 11.5 |
| USNA | 6.7 | 15.9 |
Table 2.
The 95th percentile of positioning error for the static scenarios of the two stations considered (SPTR: Madrid, Spain; USNA: New Jersey, U.S.A.).
Table 2.
The 95th percentile of positioning error for the static scenarios of the two stations considered (SPTR: Madrid, Spain; USNA: New Jersey, U.S.A.).
| Errors p95 (cm) | Horizontal | Vertical |
|---|
| SPTR | 12.4 | 20.1 |
| USNA | 12.7 | 25.9 |
Table 3.
RMS of positioning error for the kinematic scenarios comparing the different solutions presented.
Table 3.
RMS of positioning error for the kinematic scenarios comparing the different solutions presented.
| Errors RMS (cm) | Horizontal | Vertical |
|---|
| GMV HAS PE | 33.8 | 47.2 |
| GMV HAS PE + IMU | 27.7 | 29.3 |
| State-of-the-art PVT | 122.7 | 105.7 |
| GMV GSHARP | 8.9 | 11.2 |
Table 4.
The 95th percentile of positioning error for the kinematic scenarios comparing the different solutions presented.
Table 4.
The 95th percentile of positioning error for the kinematic scenarios comparing the different solutions presented.
| Errors p95 (cm) | Horizontal | Vertical |
|---|
| GMV HAS PE | 68.1 | 91.1 |
| GMV HAS PE + IMU | 47.1 | 50.4 |
| State-of-the-art PVT | 207.3 | 230.4 |
| GMV GSHARP | 16.4 | 20.1 |
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}