
Cyber–Physical System for Traffic Sign Detection and Recognition †

Abstract
:1. Introduction
- Traffic accidents, deaths, and injuries due to the fault of the drivers of road vehicles according to offenses committed (first offense only).
- Traffic accidents, deaths, and injuries due to improper actions by the passengers.
- Traffic accidents, deaths, and injuries due to improper actions by pedestrians.
2. Methods
3. Implementation
- Step 1: Creating/modifying a dataset of traffic sign image samples for training and testing the traffic sign detection and recognition model based on neural networks;
- Step 2: Developing a model for detection and recognition of traffic signs based on YOLOv8 and long short-term memory (LSTM) networks;
- Step 3: Training the developed model with the provided dataset;
- Step 4: Implementing the trained model on Android-based software with TensorFlow;
- Step 5: Testing the module for traffic sign detection and recognition;
- Step 6: Signaling for traffic sign detection and recognition.
3.1. Creating/Modifying a Dataset of Traffic Sign Image Samples for Training and Testing the Traffic Sign Detection and Recognition Model Based on Neural Networks
- The greatest possible number of image samples for training and testing. For the purpose of this research, over 100,000 images were used;
- The image samples are of a high resolution. The image sample resolution was between 1280 × 720 and 1920 × 1080;
- The image samples are from different seasons (spring, autumn, winter);
- The image samples are from different times of day (morning, afternoon, evening);
- The image samples are from different weather conditions (rain, snow, bright sun).
3.2. Developing a Model for Detection and Recognition of Traffic Signs Based on YOLOv8 and Long Short-Term Memory Networks
- The neural network model ought to function on hardware-light devices (such as mobile phones and smart glasses);
- The model has to be executable in real-time;
- Road signs of different shapes must be recognized by the neural network;
- The model must be able to separate other items from traffic signs that have the same color and form as the traffic signs, such as billboards and safety equipment.
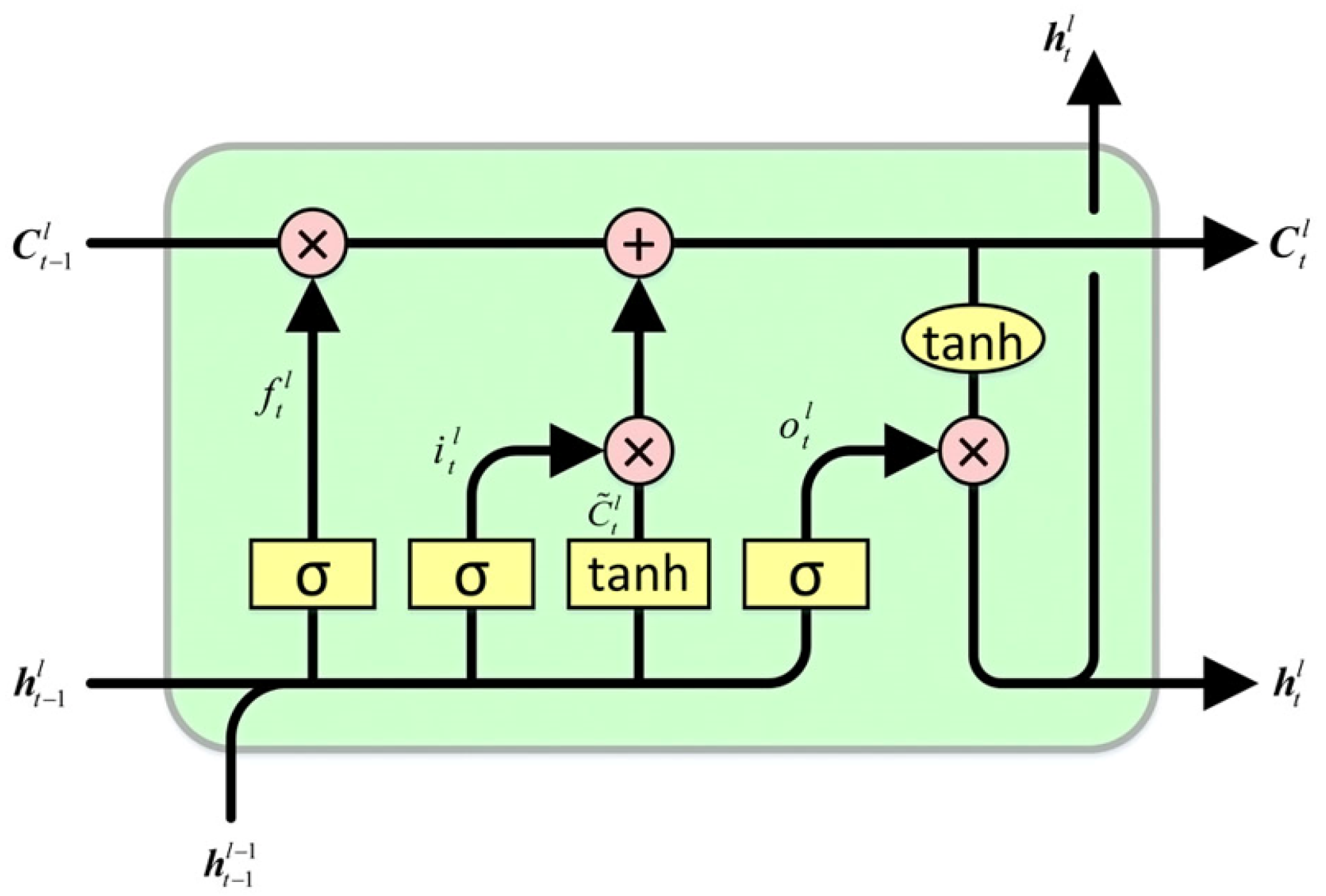
3.2.1. The Long Short-Term Memory (LSTM) Network Is Used to Exclude False Objects from Real Traffic Signs
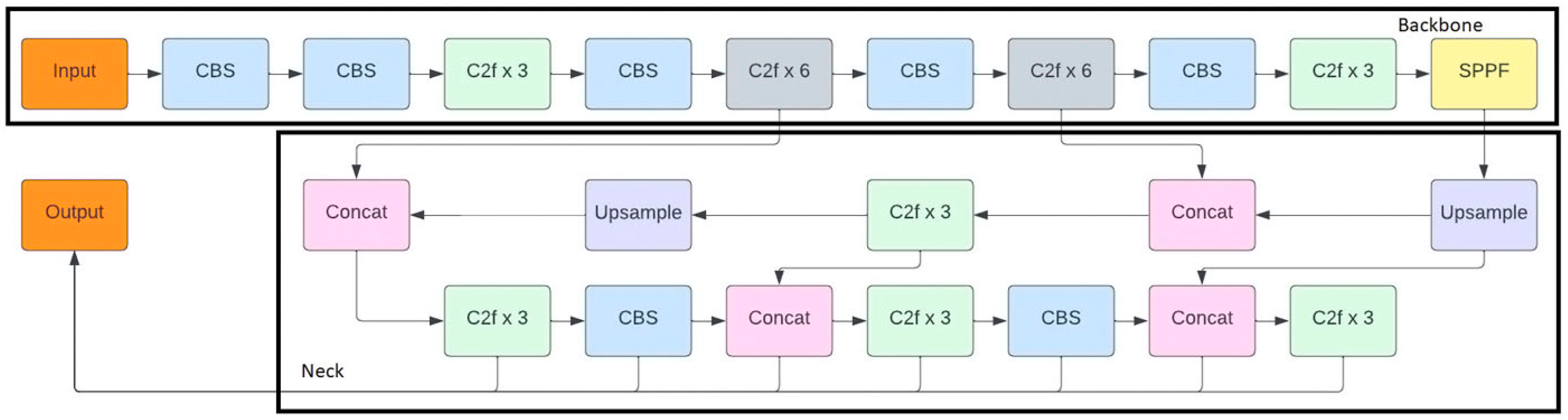
3.2.2. YOLOv8 Is Used for Traffic Sign Detection and Recognition
- Anchor-free detection;
- Mosaic augmentation.
3.3. Training the Developed Model with the Provided Dataset
3.4. Implementing the Trained Model on Android-Based Software with TensorFlow
3.5. Testing the Module for Traffic Sign Detection and Recognition
3.6. Signaling for Traffic Sign Detection and Recognition
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Diakaki, C.; Papageorgiou, M.; Papamichail, I.; Nikolos, I. Overview and analysis of Vehicle Automation and Communication Systems from a motorway traffic management perspective. Transportation. Res. Part A Policy Pract. 2015, 75, 147–165. [Google Scholar] [CrossRef]
- Saadna, Y.; Behloul, A. An overview of traffic sign detection and classification methods. Int. J. Multimed. Inf. Retr. 2017, 6, 193–210. [Google Scholar] [CrossRef]
- Aghdam, H.H.; Heravi, E.J.; Puig, D. Recognizing traffic signs using a practical deep neural network. In Robot 2015: Second Iberian Robotics Conference; Springer International Publishing: Cham, Switzerland, 2015; pp. 399–410. [Google Scholar] [CrossRef]
- Aghdam, H.H.; Heravi, E.J.; Puig, D. A practical approach for detection and classification of traffic signs using Convolutional Neural Networks. Robot. Auton. Syst. 2016, 84, 97–112. [Google Scholar] [CrossRef]
- Boujemaa, K.S.; Berrada, I.; Bouhoute, A.; Boubouh, K. Traffic sign recognition using convolutional neural networks. In Proceedings of the 2017 International Conference on Wireless Networks and Mobile Communications (WINCOM), Rabat, Morocco, 1–4 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Fatin Zaklouta, F.Z.; Bogdan Stanciulescu, B.S. Real-time traffic sign recognition in three stages. Robot. Auton. Syst. 2014, 62, 16–24. [Google Scholar] [CrossRef]
- Bahlmann, C.; Zhu, Y.; Ramesh, V.; Pellkofer, M.; Koehler, T. A system for traffic sign detection, tracking, and recognition using color, shape, and motion information. In Proceedings of the IEEE Proceedings. Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005; pp. 255–260. [Google Scholar] [CrossRef]
- Ministry of Interior Affairs. Road Transport Injuries in 2022; General Directorate “National Police”: Sofia, Bulgaria, 2022.
- Epson Moverio. Available online: https://moverio.epson.com (accessed on 20 November 2023).
- Van Houdt, G.; Mosquera, C.; Nápoles, G. A Review on the Long Short-Term Memory Model. Artif. Intell. Rev. 2020, 53, 5929–5955. [Google Scholar] [CrossRef]
- Loue, H.; Duan, X.; Guo, J. Dc-yolov8: Small-size object detection algorithm based on camerasensor. Electronics 2023, 12, 2323. [Google Scholar] [CrossRef]
- Sepp, H.; Jürgen, S. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Participants in Traffic Accidents | Dead | Wounded | Year |
|---|---|---|---|
| Drive | 291 | 3975 | 2022 |
| 295 | 3599 | 2021 | |
| −4 | +376 | Diffs. 2022–2021 | |
| Passenger | 146 | 2855 | 2022 |
| 170 | 2551 | 2021 | |
| −24 | +304 | Diffs. 2022–2021 | |
| Pedestrian | 94 | 1579 | 2022 |
| 94 | 1449 | 2021 | |
| 0 | +130 | Diffs. 2022–2021 | |
| Road worker | 0 | 13 | 2022 |
| 2 | 10 | 2021 | |
| −2 | +3 | Diffs. 2022–2021 | |
| Total | 531 | 8422 | 2022 |
| 561 | 7609 | 2021 | |
| −30 | +813 | Diffs. 2022–2021 |
| Name | Characteristics | |
|---|---|---|
| Model Number | BT-300 | |
| Material | OLED | |
| Supported movie formats | MP4 (MPEG4/H.264+AAC), MPEG2 (H.264+AAC), VP8 | |
| Supported still image formats | JPEG, PNG, BMP, GIF | |
| Supported audio formats | WAV, MP3, AAC | |
| Wi-Fi standards | 802.11a, 802.11b, 802.11g, Wi-Fi 4 (802.11n), Wi-Fi 5 | |
| Internal memory | Main memory | 2GB |
| User memory | 16GB Processor manufacturer | |
| Processor manufacturer | Intel | |
| Driving method | Monocrystalline silicon active matrix | |
| Maximum refresh rate | 30 Hz | |
| Filetype | EN-67 Manual (PDF), EN-2 Manual (PDF), EN-2 (PDF) | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gospodinov, N.; Krastev, G. Cyber–Physical System for Traffic Sign Detection and Recognition. Eng. Proc. 2024, 60, 21. https://doi.org/10.3390/engproc2024060021
Gospodinov N, Krastev G. Cyber–Physical System for Traffic Sign Detection and Recognition. Engineering Proceedings. 2024; 60(1):21. https://doi.org/10.3390/engproc2024060021
Chicago/Turabian StyleGospodinov, Nikolay, and Georgi Krastev. 2024. "Cyber–Physical System for Traffic Sign Detection and Recognition" Engineering Proceedings 60, no. 1: 21. https://doi.org/10.3390/engproc2024060021