
Using the Acoustic Velocity Vector to Assess the Condition of Buried Water Pipes †


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
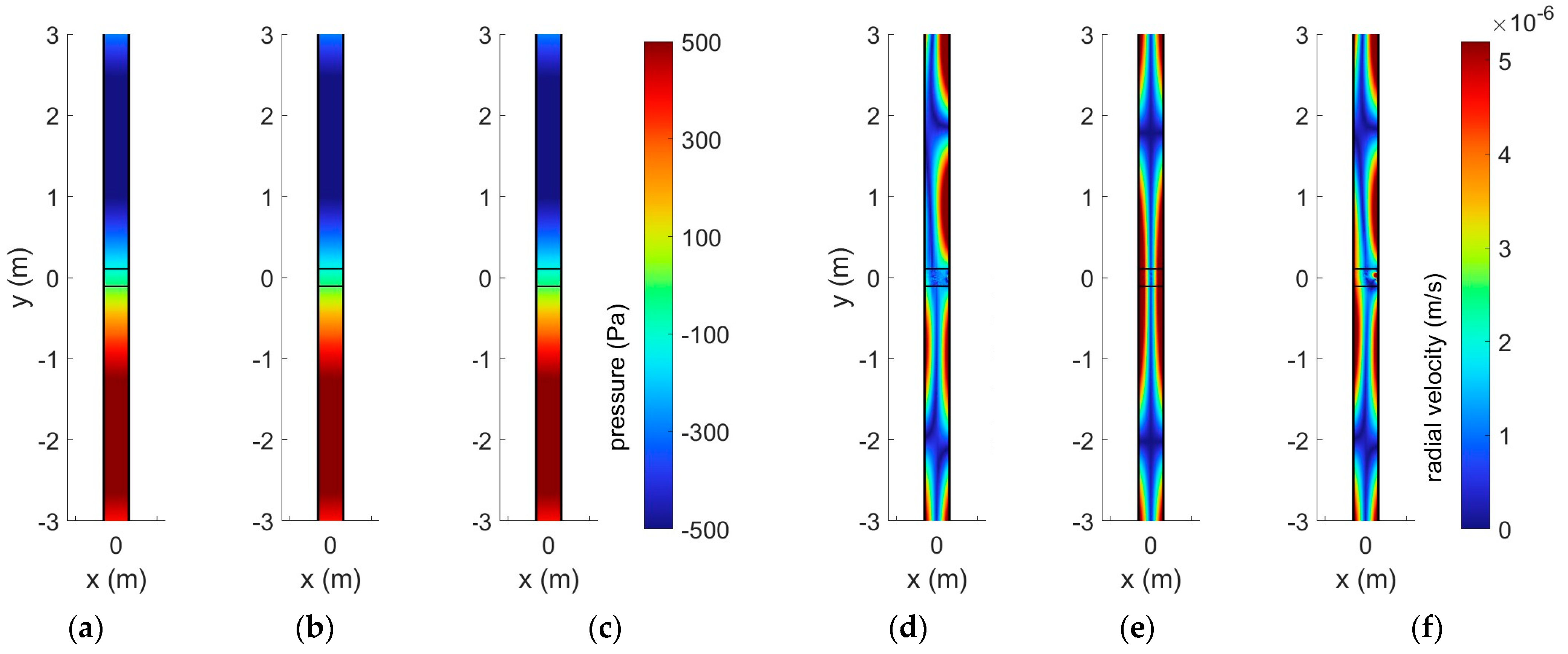
2.1. Numerical Models
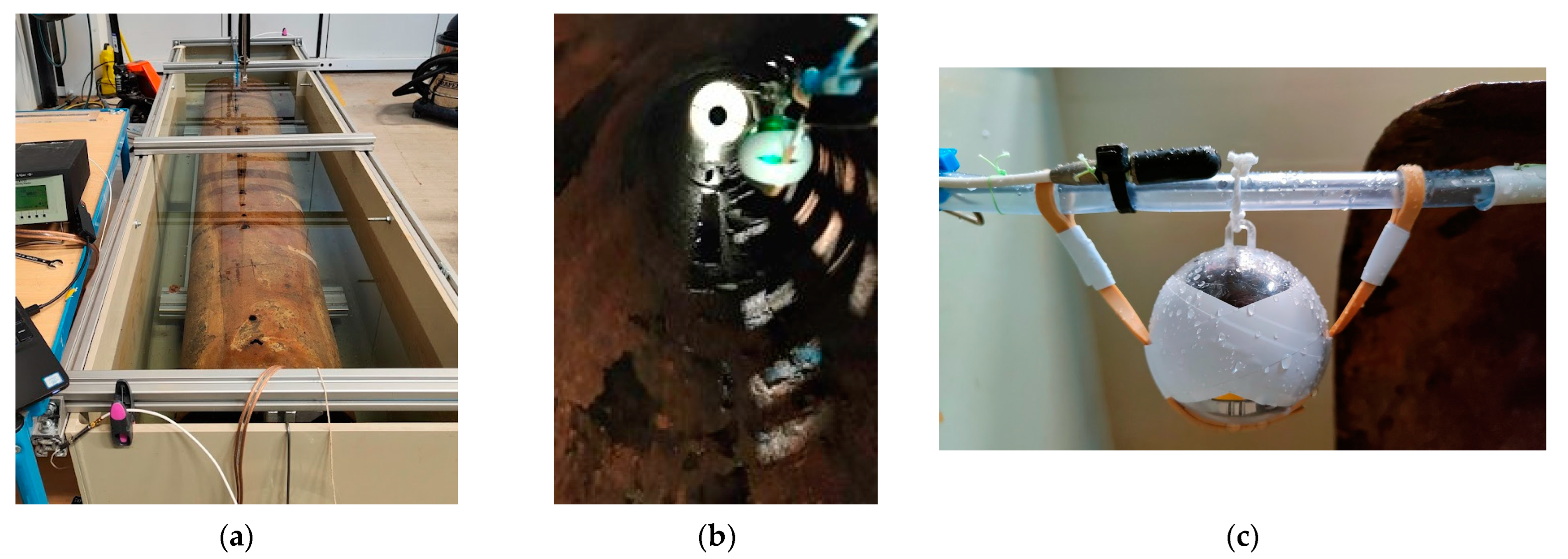
2.2. Experimental Methodology
3. Results
3.1. Numerical Models
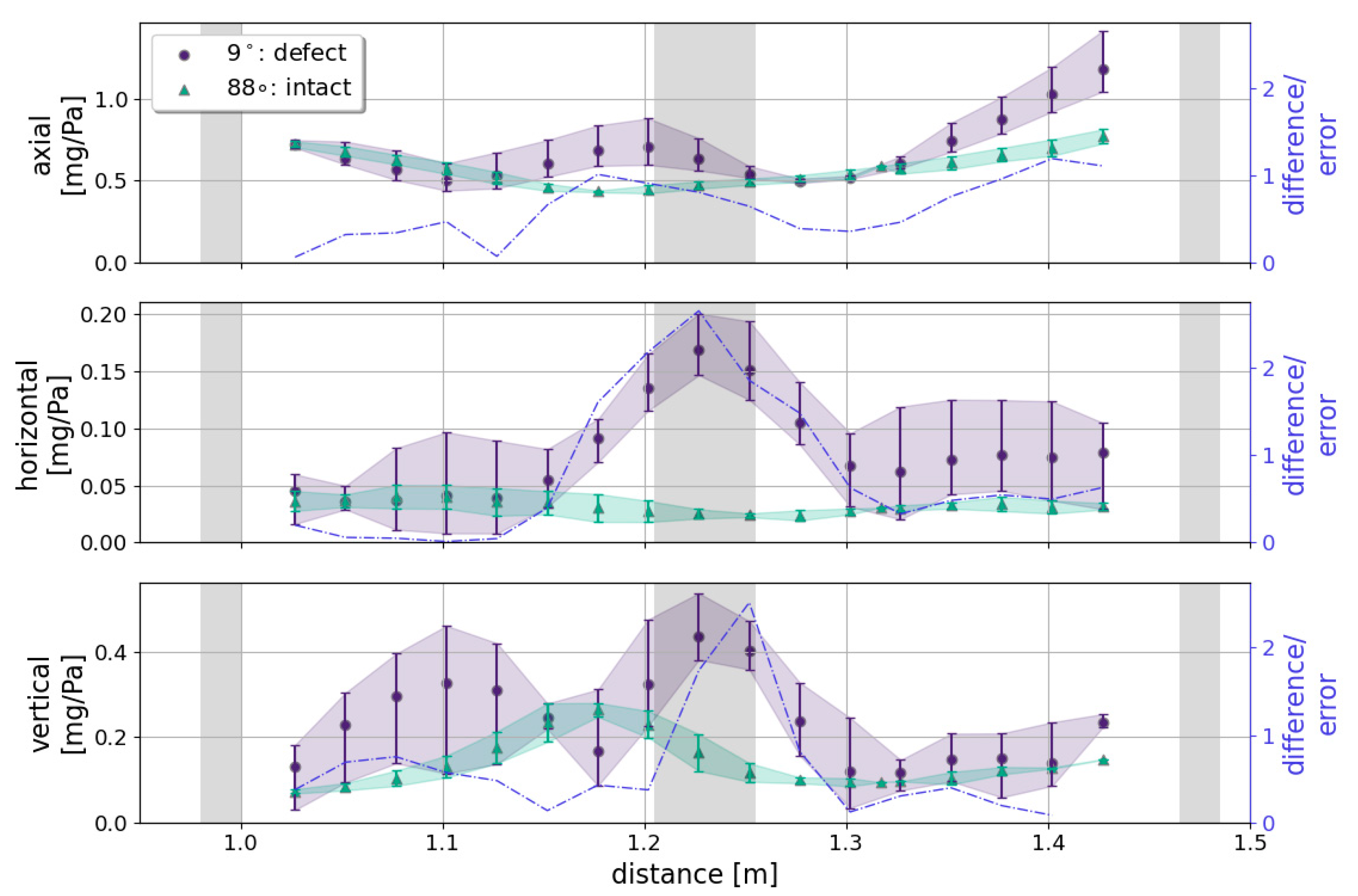
3.2. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gould, S.; Davis, P.; Beale, D.; Marlow, D. Failure analysis of a PVC sewer pipeline by fractography and materials characterization. Eng. Fail. Anal. 2013, 34, 41–50. [Google Scholar] [CrossRef]
- Rizzo, R. Water and Wastewater Pipe Nondestructive Evaluation and Health Monitoring: A Review. Adv. Civ. Eng. 2010, 2010, 818597. [Google Scholar] [CrossRef]
- Jones, C.; Mergelas, B.; Laven, K.; Bond, A. Pinpointing Exfiltration in Large Diameter Pressurized Wastewater Pipelines with the Sahara Tethered System. In Pipelines 2006: Service to the Owner; ASCE: Reston, VA, USA, 2006. [Google Scholar] [CrossRef]
- Donazzolo, V.; Yelf, R. Determination of wall thickness and condition of asbestos cement pipes in sewer rising mains using Surface Penetrating Radar. In Proceedings of the XIII International Conference on Ground Penetrating Radar, Lecce, Italy, 21–25 June 2010; pp. 1–5. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Watts, J.; Johnson, M.-D.; Horoshenkov, K. Using the Acoustic Velocity Vector to Assess the Condition of Buried Water Pipes. Eng. Proc. 2024, 69, 187. https://doi.org/10.3390/engproc2024069187
Watts J, Johnson M-D, Horoshenkov K. Using the Acoustic Velocity Vector to Assess the Condition of Buried Water Pipes. Engineering Proceedings. 2024; 69(1):187. https://doi.org/10.3390/engproc2024069187
Chicago/Turabian StyleWatts, Joanna, Michael-David Johnson, and Kirill Horoshenkov. 2024. "Using the Acoustic Velocity Vector to Assess the Condition of Buried Water Pipes" Engineering Proceedings 69, no. 1: 187. https://doi.org/10.3390/engproc2024069187