
Leak Localization Using Autoencoders and Shapley Values †


{kind=link}
{kind=link}
Abstract
:1. Introduction
- The pressure sensors are sufficiently available and placed at optimal locations for monitoring leaks.
- Measurements during no-leak periods or at pressures estimated from a calibrated hydraulic model are available.
- The measurement data are of good quality and span different scenarios for training data-driven models.
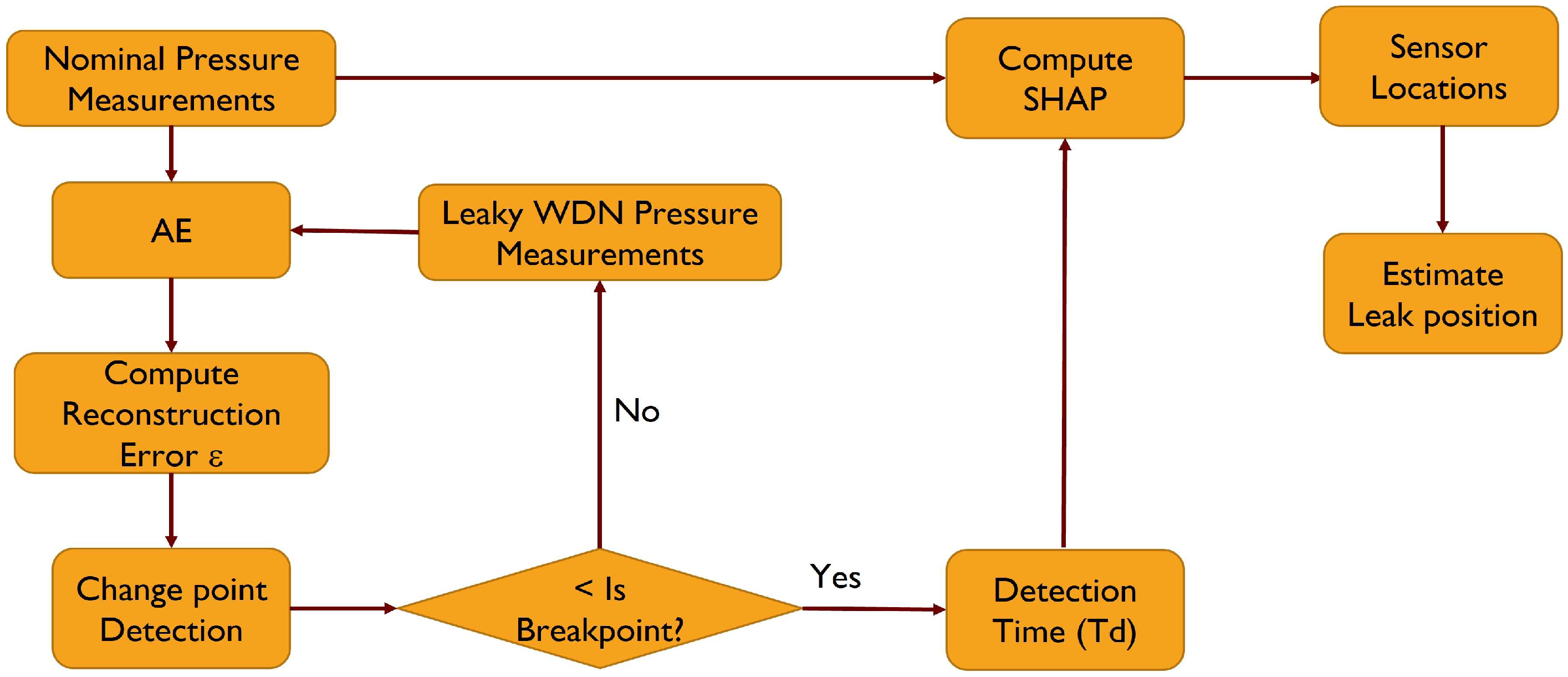
2. Materials and Methods
2.1. Step 1: Autoencoders (AE)
2.2. Step 2: Changepoint Detection
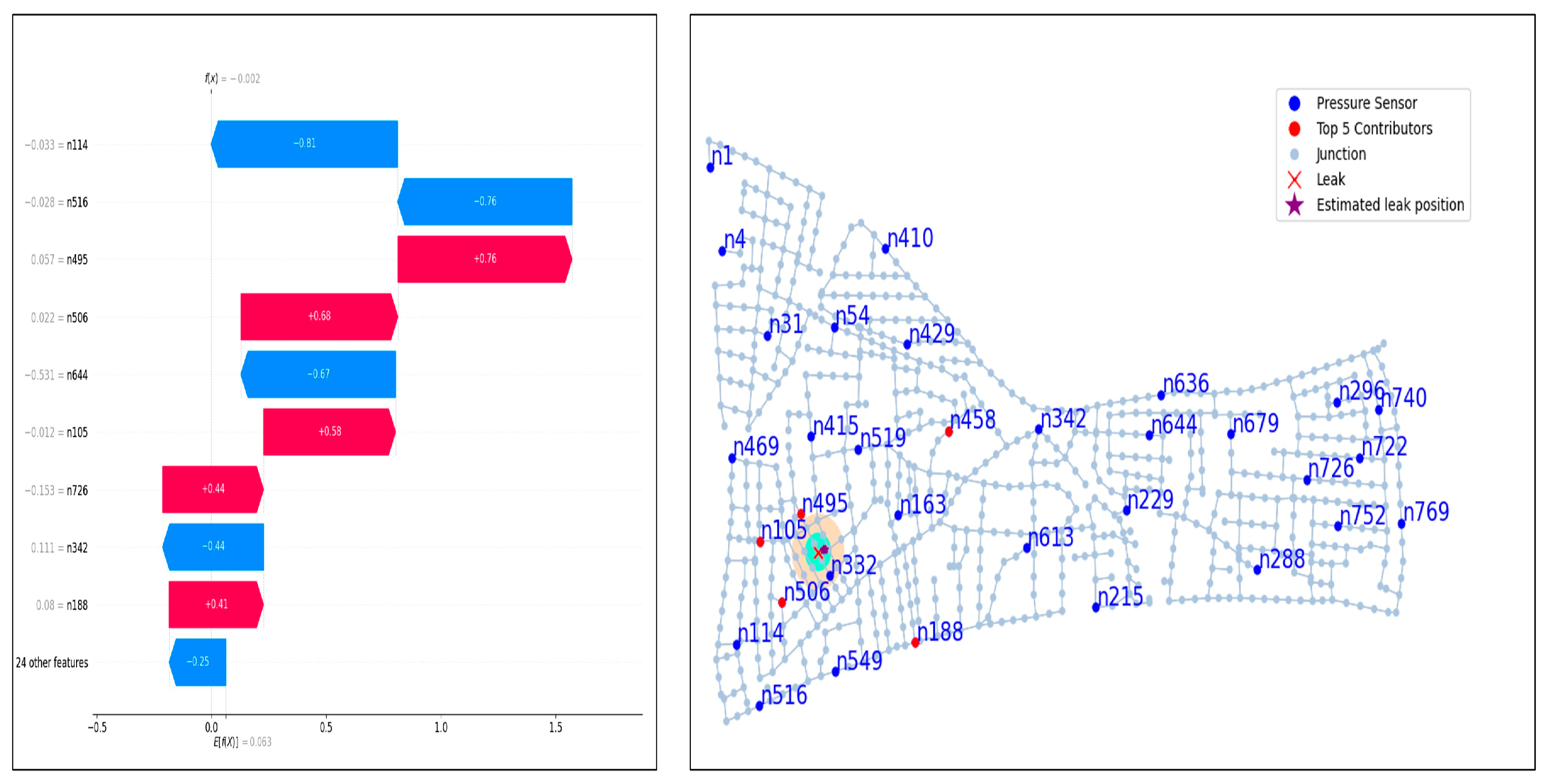
2.3. Step 3: Computation of Shapley Values
3. Results and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Statistics Norway. Available online: https://www.ssb.no/en/natur-og-miljo/vann-og-avlop/statistikk/kommunal-vannforsyning (accessed on 15 January 2024).
- Odhiambo, M.; Viñas, V.; Sokolova, E.; Pettersson, T.J.R. Health risks due to intrusion into the drinking water distribution network: Hydraulic modelling and quantitative microbial risk assessment. Environ. Sci. Water Res. Technol. 2023, 9, 1701–1716. [Google Scholar] [CrossRef]
- Hu, Z.; Chen, B.; Chen, W.; Tan, D.; Shen, D. Review of model-based and data-driven approaches for leak detection and location in water distribution systems. Water Supply. 2021, 21, 3282–3306. [Google Scholar] [CrossRef]
- Cominola, A.; Giuliani, M.; Piga, D.; Castelletti, A.; Rizzoli, A.E. Benefits and challenges of using smart meters for advancing residential water demand modeling and management: A review. Environ. Model. Softw. 2015, 72, 198–214. [Google Scholar] [CrossRef]
- Baldi, P. Autoencoders, Unsupervised Learning, and Deep Architectures. In Proceedings of the ICML Workshop on Unsupervised and Transfer Learning, Washington, DC, USA, 2 July 2011. [Google Scholar]
- Truong, C.; Oudre, L.; Vayatis, N. Selective review of offline change point detection methods. Signal Process. 2020, 167, 107299. [Google Scholar] [CrossRef]
- Lundberg, S.M.; Lee, S.I. A unified approach to interpreting model predictions. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Vrachimis, S.G.; Eliades, D.G.; Taormina, R. Dataset of BattLeDIM: Battle of the Leakage Detection and Isolation Methods. Available online: https://zenodo.org/records/4017659 (accessed on 15 January 2024).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohan Doss, P.; Rokstad, M.M.; Tscheikner-Gratl, F. Leak Localization Using Autoencoders and Shapley Values. Eng. Proc. 2024, 69, 92. https://doi.org/10.3390/engproc2024069092
Mohan Doss P, Rokstad MM, Tscheikner-Gratl F. Leak Localization Using Autoencoders and Shapley Values. Engineering Proceedings. 2024; 69(1):92. https://doi.org/10.3390/engproc2024069092
Chicago/Turabian StyleMohan Doss, Prasanna, Marius Møller Rokstad, and Franz Tscheikner-Gratl. 2024. "Leak Localization Using Autoencoders and Shapley Values" Engineering Proceedings 69, no. 1: 92. https://doi.org/10.3390/engproc2024069092
APA StyleMohan Doss, P., Rokstad, M. M., & Tscheikner-Gratl, F. (2024). Leak Localization Using Autoencoders and Shapley Values. Engineering Proceedings, 69(1), 92. https://doi.org/10.3390/engproc2024069092