
Accuracy of NTC Thermistor Measurements Using the Sensor to Microcontroller Direct Interface †



Abstract
1. Introduction
2. Sensor-to-Microcontroller Direct Interface
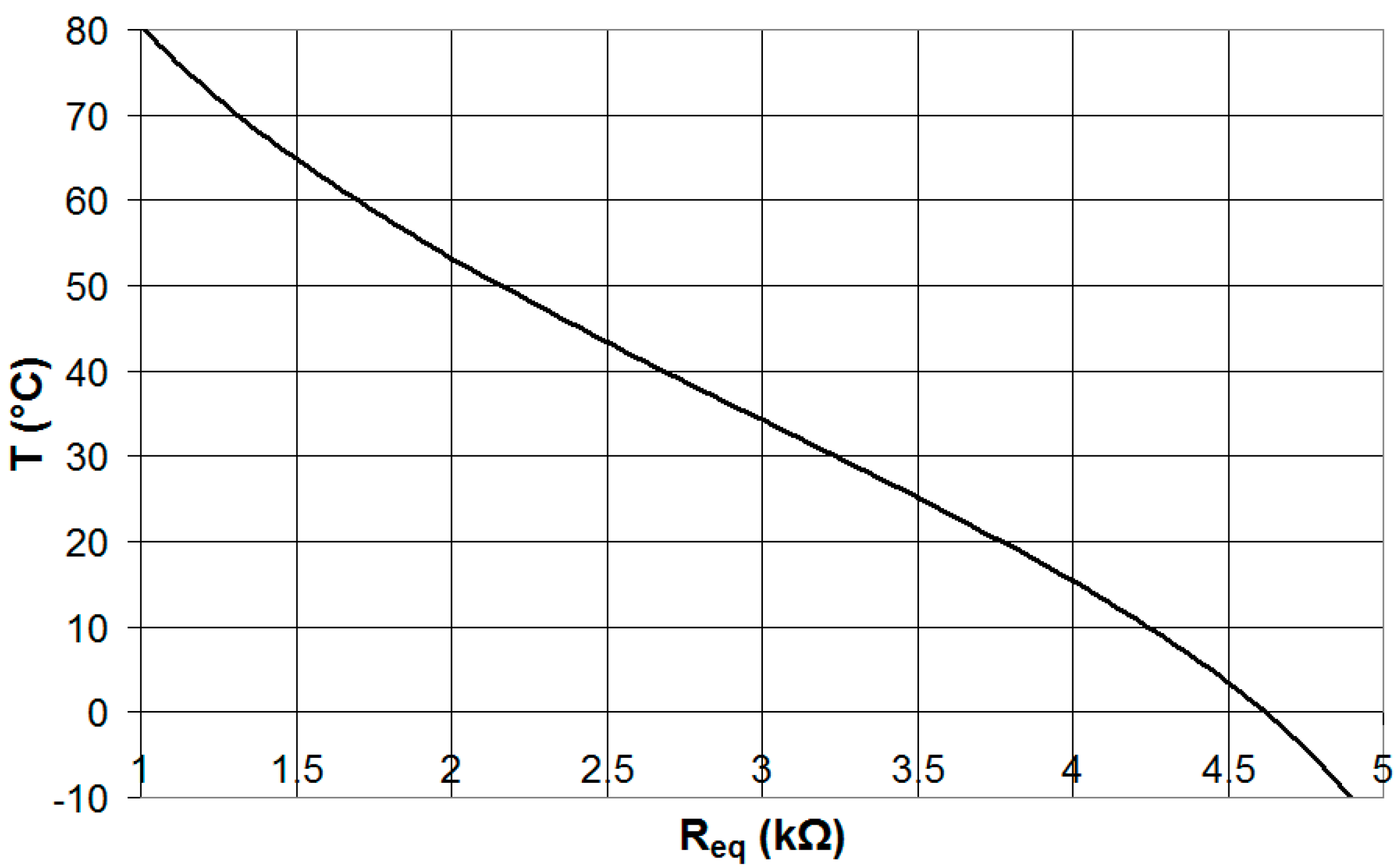
3. The NTC Temperature Sensor
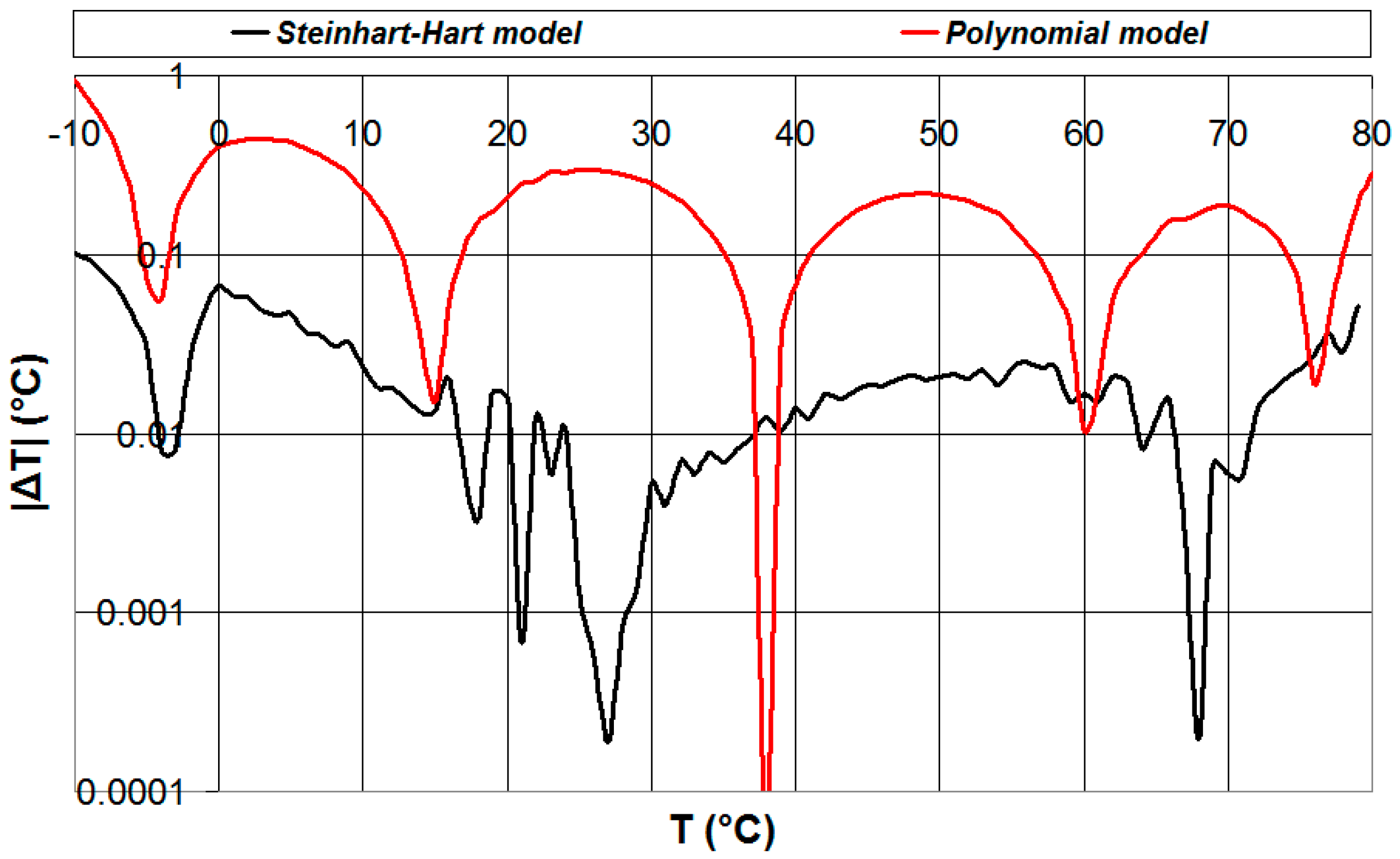
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Laghari, A.A.; Wu, K.; Laghari, R.A.; Ali, M.; Khan, A.A. A review and state of art of Internet of Things (IoT). Arch. Comput. Methods Eng. 2021, 29, 1395–1413. [Google Scholar] [CrossRef]
- Ziętek, B.; Banasiewicz, A.; Zimroz, R.; Szrek, J.; Gola, S. A portable environmental data-monitoring system for air hazard evaluation in deep underground mines. Energies 2020, 13, 6331. [Google Scholar] [CrossRef]
- Sgobba, F.; Sampaolo, A.; Patimisco, P.; Giglio, M.; Menduni, G.; Ranieri, A.C.; Hoelzl, C.; Rossmadl, H.; Brehm, C.; Mackowiak, V.; et al. Compact and portable quartz-enhanced photoacoustic spectroscopy sensor for carbon monoxide environmental monitoring in urban areas. Photoacoustics 2022, 25, 100318. [Google Scholar] [CrossRef]
- Ouni, R.; Saleem, K. Framework for sustainable wireless sensor network based environmental monitoring. Sustainability 2022, 14, 8356. [Google Scholar] [CrossRef]
- Grossi, M.; Parolin, C.; Vitali, B.; Riccò, B. A portable sensor system for bacterial concentration monitoring in metalworking fluids. J. Sens. Sens. Syst. 2018, 7, 349–357. [Google Scholar] [CrossRef]
- Grossi, M.; Parolin, C.; Vitali, B.; Riccò, B. Computer vision approach for the determination of microbial concentration and growth kinetics using a low cost sensor system. Sensors 2019, 19, 5367. [Google Scholar] [CrossRef] [PubMed]
- Pham, H.L.; Ling, H.; Chang, M.W. Design and fabrication of field-deployable microbial biosensing devices. Curr. Opin. Biotechnol. 2022, 76, 102731. [Google Scholar] [CrossRef]
- Grossi, M.; Parolin, C.; Vitali, B.; Riccò, B. Measurement of bacterial concentration using a portable sensor system with a combined electrical-optical approach. IEEE Sens. J. 2019, 19, 10693–10700. [Google Scholar] [CrossRef]
- Grossi, M.; Valli, E.; Bendini, A.; Gallina Toschi, T.; Riccò, B. A Portable Battery-Operated Sensor System for Simple and Rapid Assessment of Virgin Olive Oil Quality Grade. Chemosensors 2022, 10, 102. [Google Scholar] [CrossRef]
- Shen, Y.; Wei, Y.; Zhu, C.; Cao, J.; Han, D.M. Ratiometric fluorescent signals-driven smartphone-based portable sensors for onsite visual detection of food contaminants. Coord. Chem. Rev. 2022, 458, 214442. [Google Scholar] [CrossRef]
- Xu, J.; Wang, J.; Li, Y.; Zhang, L.; Bi, N.; Gou, J.; Zhao, T.; Jia, L. A wearable gloved sensor based on fluorescent Ag nanoparticles and europium complexes for visualized assessment of tetracycline in food samples. Food Chem. 2023, 424, 136376. [Google Scholar] [CrossRef]
- Grossi, M.; Bendini, A.; Valli, E.; Gallina Toschi, T. Field-Deployable Determinations of Peroxide Index and Total Phenolic Content in Olive Oil Using a Promising Portable Sensor System. Sensors 2023, 23, 5002. [Google Scholar] [CrossRef] [PubMed]
- Siam, A.I.; El-Affendi, M.A.; Abou Elazm, A.; El-Banby, G.M.; El-Bahnasawy, N.A.; Abd El-Samie, F.E.; Abd El-Latif, A.A. Portable and real-time IoT-based healthcare monitoring system for daily medical applications. IEEE Trans. Comput. Soc. Syst. 2023, 10, 1629–1641. [Google Scholar] [CrossRef]
- Wu, T.; Wu, F.; Qiu, C.; Redouté, J.M.; Yuce, M.R. A rigid-flex wearable health monitoring sensor patch for IoT-connected healthcare applications. IEEE Internet Things J. 2020, 7, 6932–6945. [Google Scholar] [CrossRef]
- Chen, S.; Qi, J.; Fan, S.; Qiao, Z.; Yeo, J.C.; Lim, C.T. Flexible wearable sensors for cardiovascular health monitoring. Adv. Healthc. Mater. 2021, 10, 2100116. [Google Scholar] [CrossRef] [PubMed]
- Kaur, B.; Kumar, S.; Kaushik, B.K. Novel wearable optical sensors for vital health monitoring systems—A review. Biosensors 2023, 13, 181. [Google Scholar] [CrossRef] [PubMed]
- Grossi, M.; Riccò, B. A portable electronic system for in-situ measurements of oil concentration in MetalWorking fluids. Sens. Actuators A Phys. 2016, 243, 7–14. [Google Scholar] [CrossRef]
- Aponte-Luis, J.; Gómez-Galán, J.A.; Gómez-Bravo, F.; Sánchez-Raya, M.; Alcina-Espigado, J.; Teixido-Rovira, P.M. An efficient wireless sensor network for industrial monitoring and control. Sensors 2018, 18, 182. [Google Scholar] [CrossRef]
- Kalsoom, T.; Ramzan, N.; Ahmed, S.; Ur-Rehman, M. Advances in sensor technologies in the era of smart factory and industry 4.0. Sensors 2020, 20, 6783. [Google Scholar] [CrossRef] [PubMed]
- Elahi, H.; Munir, K.; Eugeni, M.; Atek, S.; Gaudenzi, P. Energy harvesting towards self-powered IoT devices. Energies 2020, 13, 5528. [Google Scholar] [CrossRef]
- Callebaut, G.; Leenders, G.; Van Mulders, J.; Ottoy, G.; De Strycker, L.; Van der Perre, L. The art of designing remote iot devices—Technologies and strategies for a long battery life. Sensors 2021, 21, 913. [Google Scholar] [CrossRef] [PubMed]
- Reverter, F. The art of directly interfacing sensors to microcontrollers. J. Low Power Electron. Appl. 2012, 2, 265–281. [Google Scholar] [CrossRef]
- Bengtsson, L.E. Analysis of direct sensor-to-embedded systems interfacing: A comparison of targets’ performance. Int. J. Intell. Mechatron. Robot. (IJIMR) 2012, 2, 41–56. [Google Scholar] [CrossRef]
- Reverter, F. A microcontroller-based interface circuit for three-wire connected resistive sensors. IEEE Trans. Instrum. Meas. 2022, 71, 2006704. [Google Scholar] [CrossRef]
- Reverter, F. A direct approach for interfacing four-wire resistive sensors to microcontrollers. Meas. Sci. Technol. 2022, 34, 037001. [Google Scholar] [CrossRef]
- Czaja, Z. A measurement method for capacitive sensors based on a versatile direct sensor-to-microcontroller interface circuit. Measurement 2020, 155, 107547. [Google Scholar] [CrossRef]
- Czaja, Z. A measurement method for lossy capacitive relative humidity sensors based on a direct sensor-to-microcontroller interface circuit. Measurement 2021, 170, 108702. [Google Scholar] [CrossRef]
- Grossi, M. Efficient and Accurate Analog Voltage Measurement Using a Direct Sensor-to-Digital Port Interface for Microcontrollers and Field-Programmable Gate Arrays. Sensors 2024, 24, 873. [Google Scholar] [CrossRef] [PubMed]
- NTC Temperature Sensor 3950 Data Sheet. Available online: https://cdn-shop.adafruit.com/datasheets/103_3950_lookuptable.pdf (accessed on 19 May 2024).
- LTSpice Circuit Simulator. Available online: https://www.analog.com/en/resources/design-tools-and-calculators/ltspice-simulator.html (accessed on 19 May 2024).
- STM32L073RZT6 Microcontroller. Available online: https://www.st.com/en/microcontrollers-microprocessors/stm32l073rz.html (accessed on 19 May 2024).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| T (°C) | Test (°C) | |ΔTerror| (°C) | σT (°C) | Tmax (°C) | Tmin (°C) |
|---|---|---|---|---|---|
| −10 | −9.843 | 0.157 | 0.107 | −9.643 | −9.986 |
| 0 | −0.094 | 0.094 | 0.103 | 0.109 | −0.325 |
| 10 | 9.858 | 0.141 | 0.207 | 10.276 | 9.569 |
| 20 | 19.942 | 0.058 | 0.195 | 20.197 | 19.638 |
| 30 | 30.022 | 0.022 | 0.172 | 30.443 | 29.691 |
| 40 | 40.091 | 0.091 | 0.258 | 40.545 | 39.711 |
| 50 | 50.061 | 0.061 | 0.352 | 50.586 | 49.360 |
| 60 | 59.999 | 0.001 | 0.316 | 60.771 | 59.293 |
| 70 | 70.066 | 0.066 | 0.367 | 70.667 | 69.216 |
| 80 | 79.911 | 0.089 | 0.440 | 80.637 | 79.131 |
| T (°C) | Test (°C) | |ΔTerror| (°C) | σT (°C) | Tmax (°C) | Tmin (°C) |
|---|---|---|---|---|---|
| −10 | −9.571 | 0.428 | 1.013 | −7.982 | −11.975 |
| 0 | −0.463 | 0.463 | 0.644 | 0.589 | −1.665 |
| 10 | 9.581 | 0.419 | 0.703 | 10.677 | 8.489 |
| 20 | 20.367 | 0.367 | 0.404 | 20.890 | 19.499 |
| 30 | 30.309 | 0.309 | 0.273 | 30.645 | 29.699 |
| 40 | 40.017 | 0.017 | 0.264 | 40.376 | 39.575 |
| 50 | 49.684 | 0.316 | 0.273 | 50.160 | 49.123 |
| 60 | 59.861 | 0.139 | 0.286 | 60.346 | 59.362 |
| 70 | 70.291 | 0.291 | 0.398 | 70.931 | 69.209 |
| 80 | 79.930 | 0.070 | 0.379 | 80.637 | 79.311 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grossi, M.; Omaña, M. Accuracy of NTC Thermistor Measurements Using the Sensor to Microcontroller Direct Interface. Eng. Proc. 2024, 82, 12. https://doi.org/10.3390/ecsa-11-20527
Grossi M, Omaña M. Accuracy of NTC Thermistor Measurements Using the Sensor to Microcontroller Direct Interface. Engineering Proceedings. 2024; 82(1):12. https://doi.org/10.3390/ecsa-11-20527
Chicago/Turabian StyleGrossi, Marco, and Martin Omaña. 2024. "Accuracy of NTC Thermistor Measurements Using the Sensor to Microcontroller Direct Interface" Engineering Proceedings 82, no. 1: 12. https://doi.org/10.3390/ecsa-11-20527
APA StyleGrossi, M., & Omaña, M. (2024). Accuracy of NTC Thermistor Measurements Using the Sensor to Microcontroller Direct Interface. Engineering Proceedings, 82(1), 12. https://doi.org/10.3390/ecsa-11-20527