
Analysis of GNSS Signal Correlation in Terrestrial Vehicles †

Abstract
:1. Introduction
2. Signal Model
3. Key Point Indicator Metrics
4. Non-Linear Least Squares
5. Setup Description
6. Results
6.1. Analysis of GNSS Signal Correlations
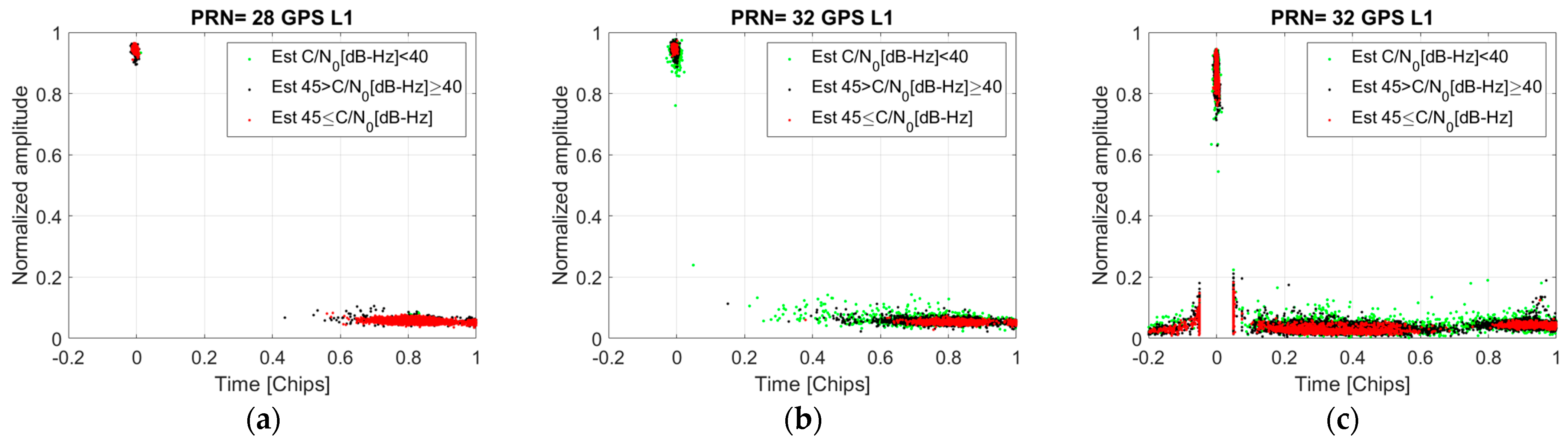
- The urban scenario provides higher RMSE magnitudes than the rural scenario due to the multipath effect. In the urban scenario, correlation functions with low C/N0 are more affected by multipath, causing a higher error with respect to the reference correlation function. Comparing the outcome for C/N0 values below 40 dB-Hz, the rural scenario offers much lower RMSE values than the urban scenario. The former is mostly affected by the presence of noise, while the latter is affected not only by noise but also by multipath.
- The right part of the normalized correlation functions is more distorted than the left part. This occurs because the reflections are probably received after the LOS impacts largely the right part of the correlation functions. The correlations computed from the reflected signals exhibit the highest magnitudes after the peak of the LOS correlation, which is being tracked most of the time by the receiver.
- In some periods of time in the urban scenario, satellite signal visibility is clean (often high-elevation satellites are less affected by multipath); therefore, the signal is received with high C/N0 (higher than 45 dB-Hz). In these periods, the RMSE of both scenarios is relatively similar.
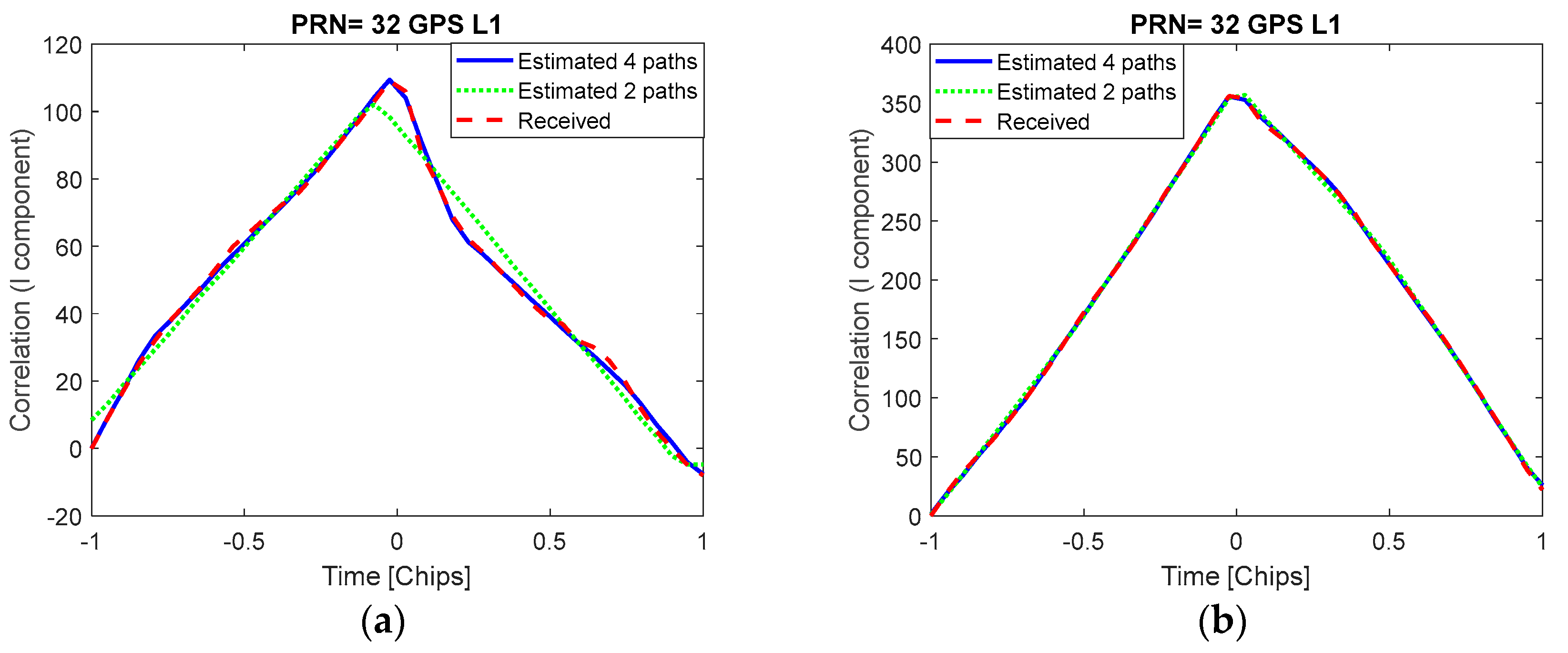
6.2. Multipath Estimation
7. Conclusions
8. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qin, H.; Xue, X.; Yang, Q. GNSS multipath estimation and mitigation based on particle filter. IET Radar Sonar Navig. 2019, 13, 1588–1596. [Google Scholar]
- Blanco-Delgado, N.; Nunes, F.D. Multipath estimation in multicorrelator GNSS receivers using the maximum likelihood principle. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3222–3233. [Google Scholar]
- Iliopoulos, A.; Enneking, C.; Crespillo, O.G.; Jost, T.; Thoelert, S.; Antreich, F. Multicorrelator signal tracking and signal quality monitoring for GNSS with extended Kalman filter. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Xie, P.; Petovello, M.G. Measuring GNSS multipath distributions in urban canyon environments. IEEE Trans. Instrum. Meas. 2014, 64, 366–377. [Google Scholar]
- Otero-Villamide, X.; Gómez-Casco, D.; De Pasquale, G.; Sirikan, N.; Crosta, P. Multi-Frequency Multi-Constellation GNSS Chipset Test Campaigns. Latest Performance Overview. In Proceedings of the NAVITEC 2022, Noordwijk, The Netherlands, 4–8 April 2022; pp. 1–11. [Google Scholar]
- Gómez-Casco, D.; López-Salcedo, J.A.; Seco-Granados, G. Optimal post-detection integration techniques for the reacquisition of weak GNSS signals. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2302–2311. [Google Scholar]
- Smyrnaios, M.; Schn, S.; Liso, M.; Jin, S. Multipath propagation, characterization and modeling in GNSS. In Geodetic Sciences-Observations, Modeling and Applications; InTech: Rijeka, Croatia, 2013. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall, Inc.: Hoboken, NJ, USA, 1993. [Google Scholar]
- Gómez-Casco, D.; Garcia-Molina, J.A.; Gusi-Amigó, A.; Crisci, M.; López-Salcedo, J.A.; Seco-Granados, G. Mitigation of false locks in the acquisition of high-order BOC signals in HS-GNSS receivers. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016; pp. 1–6. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | PRN | Lowest Elevation | Highest Elevation |
|---|---|---|---|
| Rotterdam | 25 | 51 | 86 |
| Rotterdam | 12 | 23 | 86 |
| Rotterdam | 32 | 5 | 40 |
| Nieuw-Vennep | 28 | 31 | 62 |
| Nieuw-Vennep | 32 | 0 | 40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gómez-Casco, D.; Villamide, X.O.; Crosta, P. Analysis of GNSS Signal Correlation in Terrestrial Vehicles. Eng. Proc. 2025, 88, 25. https://doi.org/10.3390/engproc2025088025
Gómez-Casco D, Villamide XO, Crosta P. Analysis of GNSS Signal Correlation in Terrestrial Vehicles. Engineering Proceedings. 2025; 88(1):25. https://doi.org/10.3390/engproc2025088025
Chicago/Turabian StyleGómez-Casco, David, Xurxo Otero Villamide, and Paolo Crosta. 2025. "Analysis of GNSS Signal Correlation in Terrestrial Vehicles" Engineering Proceedings 88, no. 1: 25. https://doi.org/10.3390/engproc2025088025
APA StyleGómez-Casco, D., Villamide, X. O., & Crosta, P. (2025). Analysis of GNSS Signal Correlation in Terrestrial Vehicles. Engineering Proceedings, 88(1), 25. https://doi.org/10.3390/engproc2025088025