Abstract
Future smart cities will consist of a heterogeneous environment, including UGVs (Unmanned Ground Vehicles) and UAVs (Unmanned Aerial Vehicles), used for different applications such as last mile delivery. Considering the vulnerabilities of GNSS (Global Navigation System Satellite) in urban environments, a resilient PNT (Position, Navigation, Timing) solution is needed. A key research question within the PNT community is the capability to deliver a robust and resilient time solution to multiple devices simultaneously. The paper is proposing an innovative time dissemination framework, based on IQuila’s SDN (Software Defined Network) and quantum random key encryption from Quantum Dice to multiple users. The time signal is disseminated using a wireless IEEE 802.11ax, through a wireless AP (Access point) which is received by each user, where a KF (Kalman Filter) is used to enhance the timing resilience of each client into the framework. Each user is equipped with a Jetson Nano board as CC (Companion Computer), a GNSS receiver, an IEEE 802.11ax wireless card, an embedded RTC (Real Time clock) system, and a Pixhawk 2.1 as FCU (Flight Control Unit). The paper is presenting the performance of the fusion framework using the MUEAVI (Multi-user Environment for Autonomous Vehicle Innovation) Cranfield’s University facility. Results showed that an alternative timing source can securely be delivered fulfilling last mile delivery requirements for aerial platforms achieving sub millisecond offset.
1. Introduction
The emergence of smart cities brings new challenges towards the integration of UAVs in urban environments, where traditional GNSS COTS (Commercial-Off-The-Shelf) receivers, due to urban shadows and adversarial attacks, makes PNT data unreliable, increasing the chance of collisions. Nowadays with the constant increase of radiofrequency interferences especially within the Baltic and in the Black see regions, as reported in [1], all maritime, ground, and aerial GNSS users are severely affected. Considering that GNSS receivers are used as one of the main sources which provides time and position data, to manned and unmanned aviation, alternative PNT sources are required. Time data is critical to ensure that autonomous vehicles operate safely, especially when in cohabitation with human-operated systems. Small errors in time can lead to a corresponding miscalculation in space between fast-moving vehicles. Accurate timing distribution is critical for autonomous transport, where stable control, collision avoidance, and safety-critical management are all time-sensitive in different ways.
To enhance the time dissemination within each user, a fusion framework is required, as presented in [2,3] where a clock ensemble KF algorithm is used to track the clock errors by using different time sources relative to one reference clock. Each user requires more time sources to enhance the ability to cope with external threats which may degrade the time accuracy of the system time as specified in [4]. Although it is possible to use an ensemble of identical clocks as presented in [5], a combination of different clocks can provide better performance and resilience [6].
Another approach to improve the local system time stability and accuracy is presented in [7], where a deep coupled integration is implemented using a CSAC (Chip Scale Atomic Clock) and a COTS GNSS receiver. CSAC are characterized of a better long term-stability, against other oscillators equipped on most of GNSS COTS receivers, which can improve the PNT solution. As result, less satellites are needed to compute the receiver position [8]. Although, a CSAC can provided superior performances against local XO (Crystal Oscillators), the relatively high cost does not allow the scalability of such solution to multiple devices on a large-scale scenario.
Hence, the secure deployment of UAVs in smart cities requires alternative PNT sources, and an adequate fusion framework capable to cope with potential time disruptions, thereby preventing any possible conflict with other manned and unmanned systems. To disseminate alternative time data to multiple users, United Kingdom’s NPL (National Physical Laboratory), with the NTC (National Timing Center) program, aims to deliver precise time data to multiple users, through four time innovation nodes in the UK. Cranfield University is one of the hosts of the timing nodes, and joint academic partner in the NTC program, contributing to the building of RETSI (Resilient Enhanced Time Scale Infrastructure).
To address the need of an adequate time fusion framework the authors extended the work presented previously in [9] by combining time data from a GPS receiver and the Research and Innovation timing node, in an outdoor environment, using a KF algorithm, to predict the time offset and skew of the system time. Time data is disseminated using the IEEE 802.11ax protocol and iQuila’s SDN coupled with Quantum Dice QRNG (Quantum Random Number Generator) keys.
The rest of the paper is divided as follows: in Section 2 the sensor fusion time requirements for autonomous systems are defined, in Section 3 the proposed fusion framework is described, in Section 4 the system configuration framework, in Section 5 the results are presented and in Section 6 the conclusions.
2. Time Synchronization Requirements
Considering that each vehicle does have very specific dynamics, and each user is equipped with sensors with different noises and timestamping accuracies, it is important to outline the impact of time synchronization in sensor fusion frameworks. Sensor synchronization can be classified as intra-machine synchronization, which consist of the synchronization of all the sensors within a specific user, and inter-machine synchronization which consist in the synchronization of all the sensors of all the users within a common network, as specified in [10]. This factor can significantly influence the safety of shared airspace, between manned and unmanned aerial vehicles. Aerial vehicles such as UAVs and aircraft are characterized by fast dynamics, and the main factor, which is limiting the accuracy of sensor fusion frameworks, is dictated by the synchronization precision and the used sensors accuracy as presented in [11]. From Table 1 it is possible to observe the minimum synchronization error, which is required by three platforms, a car, a multi rotor and fixed wing UAV, each characterized by a specific dynamic, and all users which will be encountered in urban environments. Time synchronization is critical also for ground infrastructures which can be used to track UAVs in urban dense environments. In [12] the authors analyzed the impact of the time synchronization on tracking a UAV within a predefined airspace showing a consistent degradation in performance when the synchronization error exceeded 100 ms. Hence, urban environments require stringent time synchronization requirements to avoid any air collision.

Table 1.
Minimum synchronization error requirements for different platforms [11].
3. Fusion Framework
Most UAVs are equipped with low-cost XOs which are responsible to keep the system time as accurate as possible. Unfortunately, external weather conditions, and crystal aging factors, are deteriorating substantially the accuracy of the system time or ‘kernel time’ as presented previously in [9]. Considering, that most of the XOs have a frequency tolerance of ±20 ppm (Parts Per Million) at 25 °C, as it can be seen from Equation (1), the kernel clock will drift 100 ms in approximately 83 min, considering a constant frequency accuracy of 20 ppm.
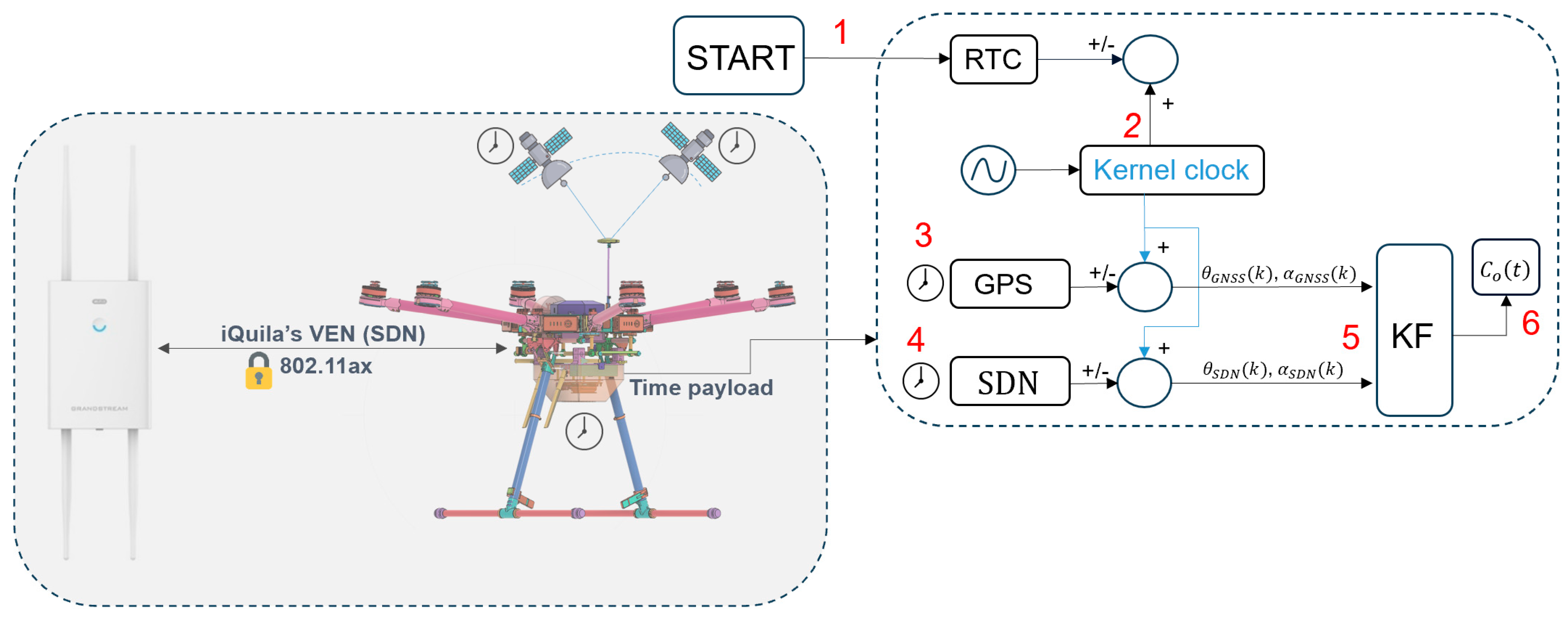
To adjust the kernel clock time drift over long periods of time when the board is not powered, the authors implement a RTC (Real Time Clock) mechanism or ‘hardware clock’. In addition, to enhance the system time accuracy without getting any corrections over internet with synchronization protocols, such as NTP (Network Time Protocol) or IEEE 1588 PTP (Precision Time Protocol) a time fusion protocol is presented and implemented. To cope with the kernel time instabilities the authors proposed a linear KF, which is fusing time offset and skew from a GPS receiver and SDN, estimating the system time offset, as it can be observed from Figure 1. The fusion algorithm starts once the board is powered, and RTC corrections are applied, as presented in Figure 1 at step 1 and 2. The XO can be described by a two-state equation as follows [13]:
where is the time offset between the kernel time and the reference clock, while is defined as skew, which can be described as the difference between the frequency of the kernel time and the reference clock. Instead and are defined as white Gaussian random noise processes, and as the time interval between each reference time data. To gather data from GPS, the gpsd (8) library is used to extract the GPS time offset while GPS skew is calculated considering the timestamps of each offset value, as described in Equation (3). Instead SDN time offset and skew, which are disseminated using the IEEE 802.11ax protocol and an AP, are gathered and decrypted using iQuila’s VEN (Virtual Extended Network) client as illustrated in Figure 1 at step 3 and 4.
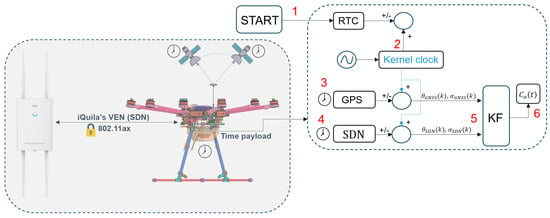
Figure 1.
Time fusion framework using GNSS and iQuila’s VEN time data as alternative time source. 1—Start the local embedded board; 2—Kernel clock adjusted with the RTC mechanism; 3—GPS time source; 4—SDN time source; 5—KF input data; 6—KF output.
To filter the time data gathered from both sources, a KF is defined by the prediction step as defined in Equations (4) and (5) [14].
where and are the variances of the offset and skew of each time source. Instead, the correction step is defined by the following equations:
where is the innovation residual, the measurement vector, the predicted state vector, the innovation covariance, while is the Kalman gain along the and being respectively the corrected state estimate and corrected estimate covariance. The measurement noise covariance matrix is defined in Equation (11) [15] where and are timestamping uncertainty variances of the master and respectively of the slave, while the variance of the propagation delay asymmetry, and and respectively the variance of the offset and skew.
4. System Configuration
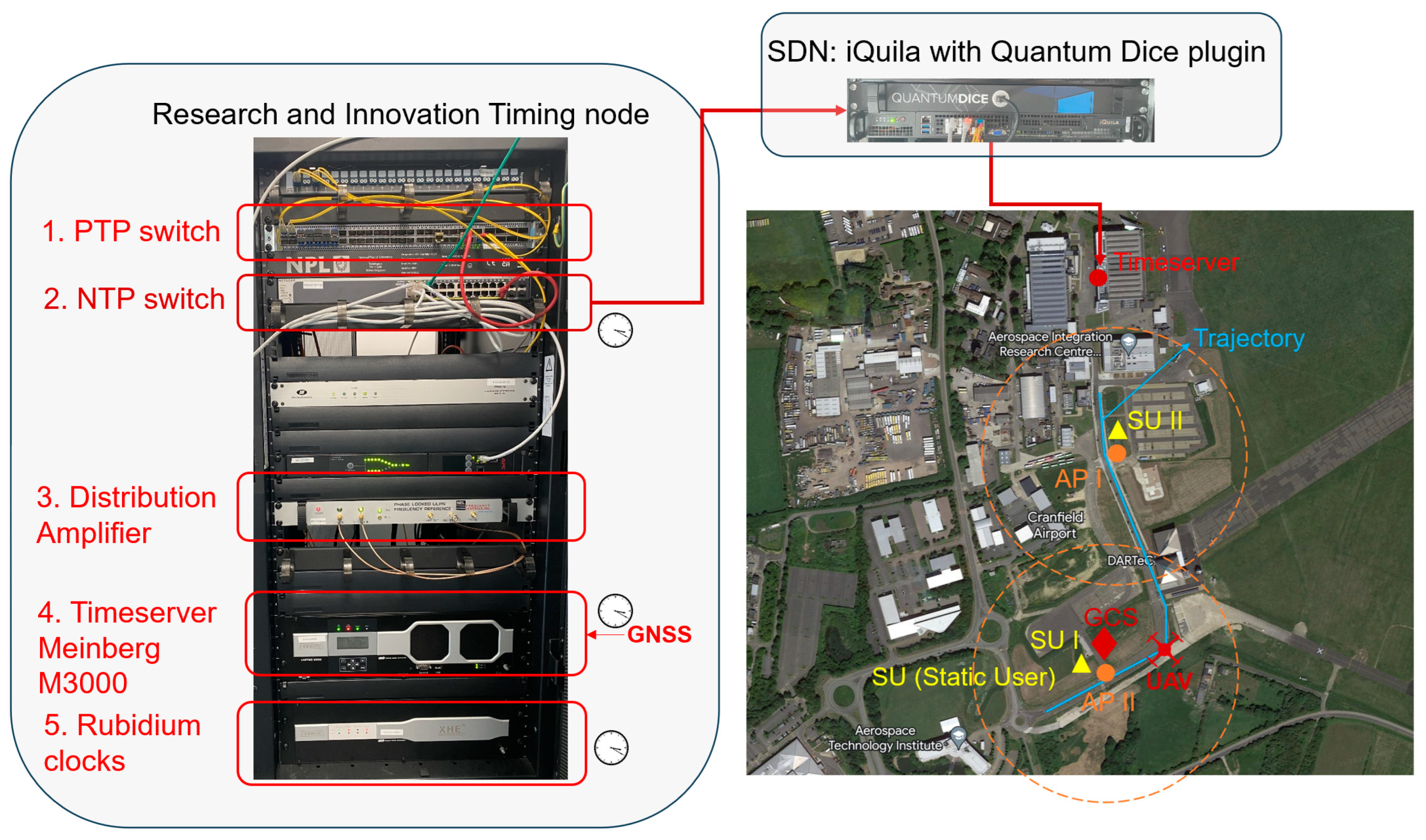
To test the KF algorithm, two static users and one dynamic, are deployed. Each user is formed by a Jetson Nano (NVIDIA Corporation, Santa Clara, CA, USA) as CC, an Intel AX200 IEEE 802.11ax (Intel Corporation, Santa Clara, CA, USA) wireless card, a VK-162 GPS receiver (Shenzhen FlyFun Technology, Shenzhen, China), and a Pixhawk 2.1 (Cubepilot, Breakwater, Australia) as FCU. The role of the CC is to gather and fuse all the time data from the GPS, and the IEEE 802.11ax receiver and to run the iQuila’s VEN client which is responsible to extract and decrypt time data from the Research and Innovation timing node. In addition, time data is disseminated to each FCU as presented previously in [9]. Time data from the Research and Innovation timing node is disseminated to all the users within the same network through a fiber link, and two Grandstream GWN7664LR (Grandstream Networks, Boston, MA, USA) APs (Access Points) which are covering each a range of approximately 180 m using the MUEAVI Cranfield’s University facility as it can be seen from Figure 2.
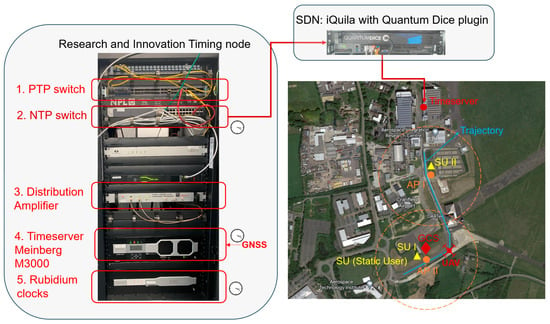
Figure 2.
Practical system configuration in an outdoor environment.
Each AP can connect simultaneously up to 750 users, and the range can be extended within the same network up to 50 AP, according to the manufacturer datasheet. Each AP is configured to operate only within the IEEE 802.11ax 5 GHz band, to avoid any possible interference of the command-and-control link which is responsible for the control and stability of the UAV, which operates in the 2.4 GHz band. Furthermore, a GCS (Ground Control Station) is used to monitor the connectivity and the performance of all the users within the same network. As it can be seen from Figure 2, AP I and AP II, represents the location of the two access points, SU and SU II the static users location, while the UAV is identified as the dynamic user.
5. Results
As described in the previous section, three users were used during the outdoor tests, one dynamic and two static users. To the evaluate the latency performance of the IEEE 802.11ax link, between the AP and the connected users, against the results presented previously in [9], similar performances were obtained, in an outdoor environment, along the IMEC road, with an average RTT (Round Trip Delay) of 4 ms for both cases.
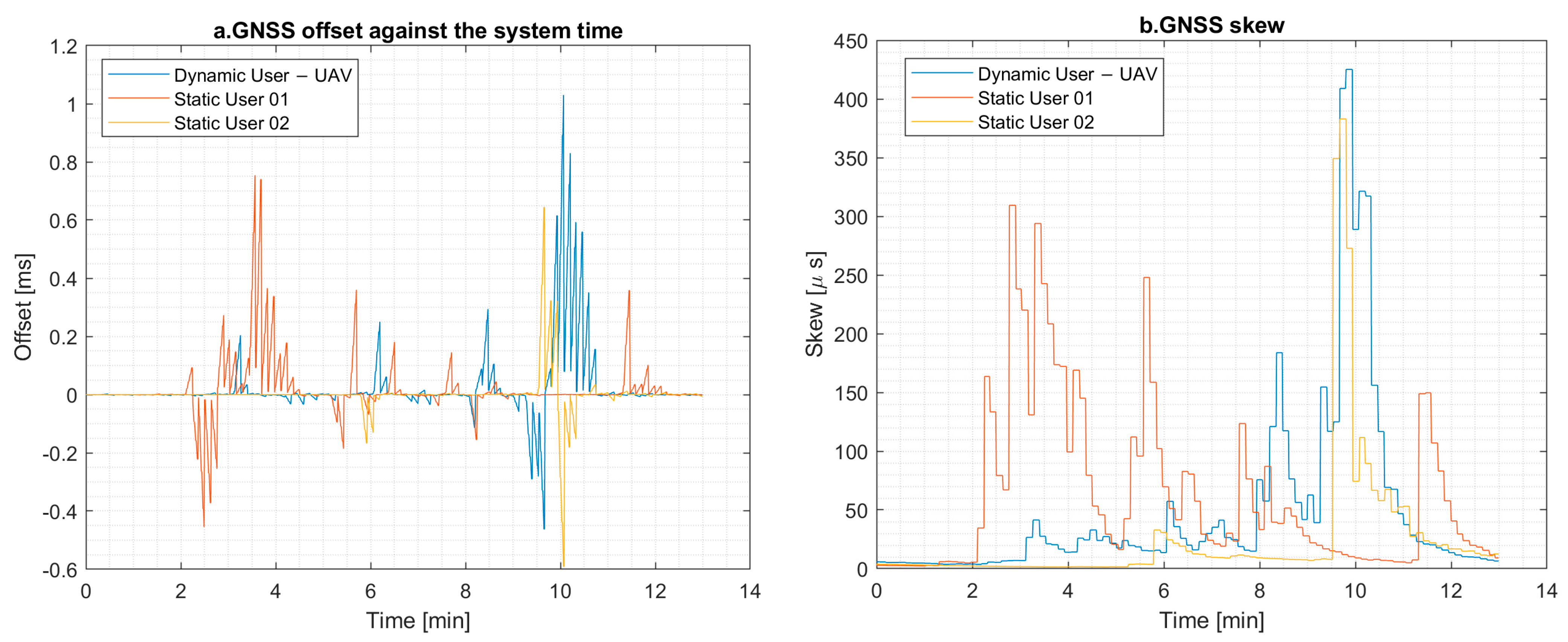
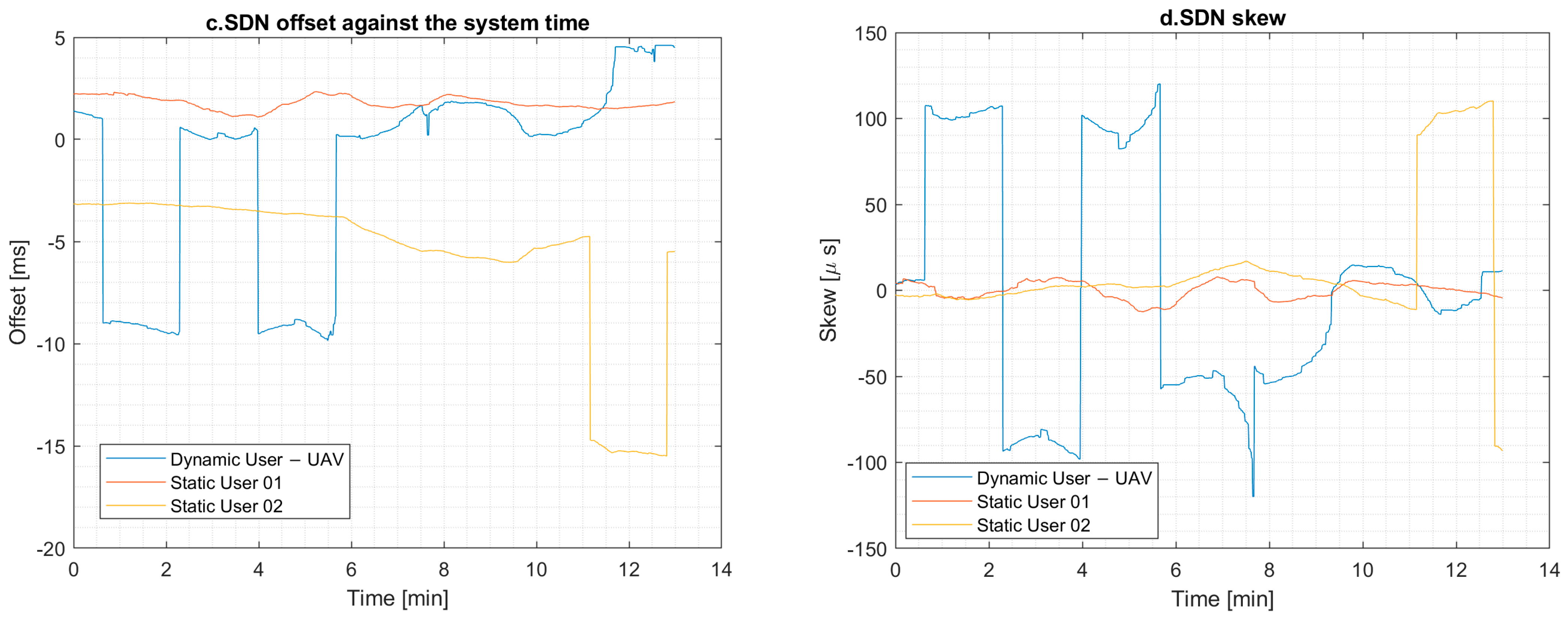
Considering the system configuration presented in Section 4, in Figure 3 it can be observed, the offset and skew performances achieved over time, considering all three users. It can be observed that although GNSS offset values against the system time are better, in comparison to SDN data, GNSS values are characterized by a higher skew, representing a more unstable time source. Instead, the SDN source, because of the air link, is characterized of a higher offset, and a lower skew. The SDN skew, in this case does have better performance, because of the Research and Innovation timing node, which is traceable to UTC (Coordinated Universal Time). Furthermore, it can be observed based on the SDN offset and skew performance, that the dynamic user, is affected by the change in dynamics over time. This is due the change in direction of the dynamic user antenna, which is mounted on a UAV, towards the used AP, during the tests.
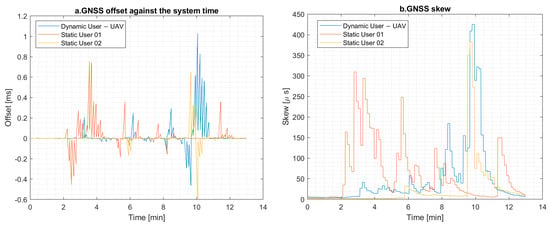
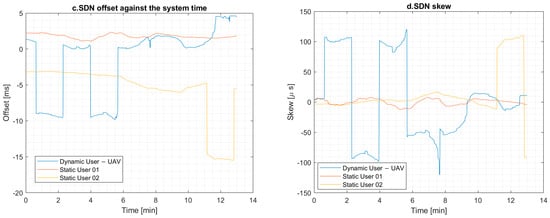
Figure 3.
GNSS and SDN performance for two static and dynamic users within the same network.
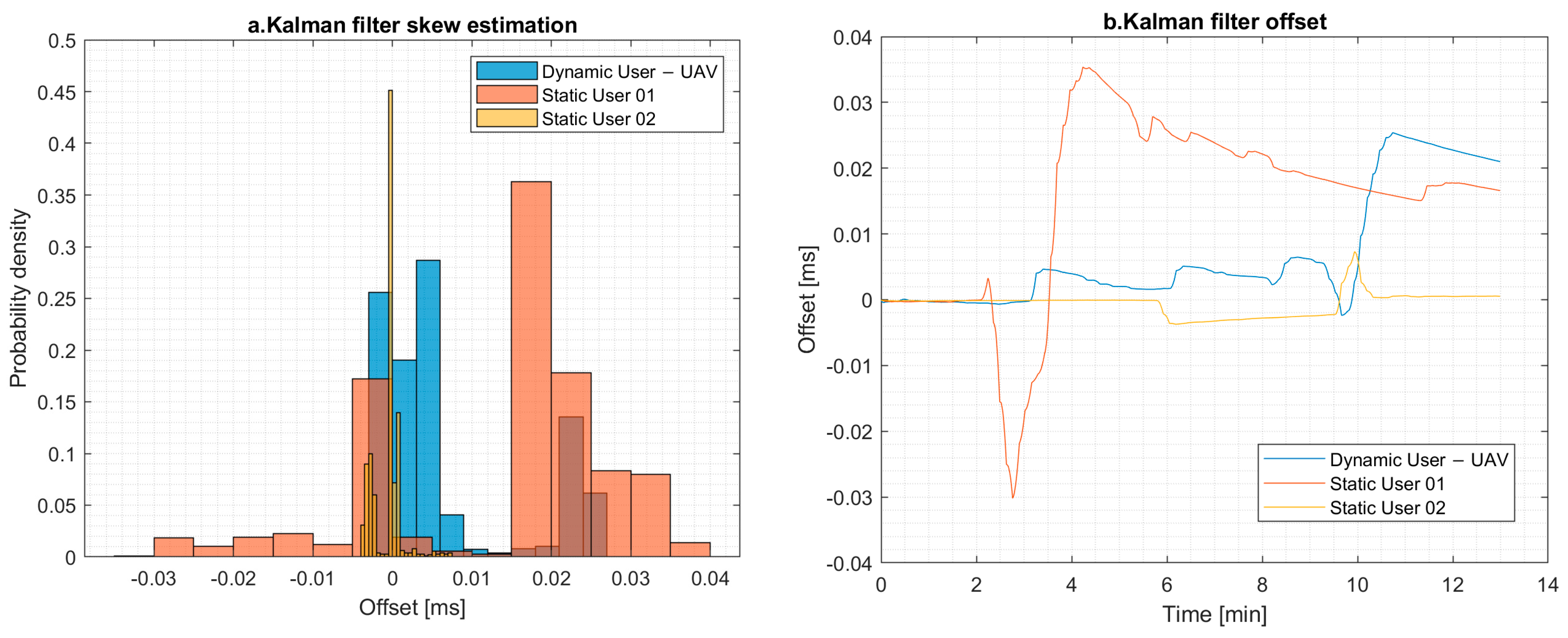
In terms of KF offset performance, it can be observed from Figure 4, that similar performances are obtained for the static user 01 and the dynamic user, which was mounted on a UAV, while better performances are achieved for the second static user. This factor can be observed also from Figure 3d, where the second user is characterized by a more stable skew in time. In addition, the second user is characterized by negative SDN offset, against the system time, meaning that the time received through the wireless link is behind the local system time. Hence, the stability and accuracy of the used time sources by the KF algorithm have a direct impact, on the estimated offset performance.
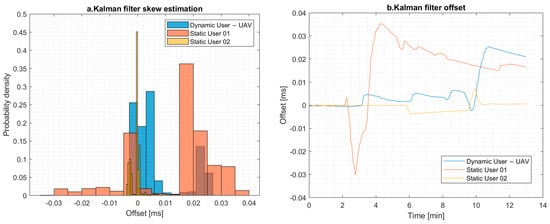
Figure 4.
Kalman Filter offset estimation for two static users and one dynamic user.
6. Conclusions
The paper is investigating the performances of a time dissemination framework to different users with different dynamics, in an outdoor environment, enhanced by the implementation of a KF algorithm, which is fusing time data from a GPS receiver and the Research and Innovation Timing node, which is securely disseminated using iQuila’s VEN client and Quantum Dice QRNG key, over an IEEE 802.11ax wireless link, through two AP. From the results presented in the previous sections, it can be observed that the KF is improving the time offset, being able to achieve an offset in terms of sub millisecond accuracy, meeting the time requirements from Section 2, considering a multi-rotor platform as reference.
Author Contributions
Conceptualization, S.A.N., I.P., W.G., A.T., D.S. and G.D.; methodology, S.A.N., T.P.A. and I.P.; software, S.A.N. and T.P.A.; validation, S.A.N. and T.P.A.; formal analysis, I.P., W.G., A.T., D.S. and G.D.; investigation, S.A.N. and I.P.; resources, S.A.N. and I.P.; data curation, S.A.N.; writing—original draft preparation, S.A.N.; writing—review and editing, S.A.N.; visualization, S.A.N.; supervision, I.P., W.G., A.T., D.S. and G.D.; project administration, I.P., W.G., A.T. and D.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Innovate UK funding, grant number 10038140.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
Author David Sweet was employed by the company iQuila Ltd. Author George Dunlop was employed by the company Quantum Dice. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Westbrook, T. Radiofrequency Interference Strategies Targeting Marine Navigation Systems: Political Motives and Consequences. J. Balt. Secur. 2023, 9, 69–97. [Google Scholar] [CrossRef]
- Coleman, M.J.; Beard, R.L. Autonomous clock ensemble algorithm for GNSS applications. Navig. J. Inst. Navig. 2020, 67, 333–346. [Google Scholar] [CrossRef]
- Spanghero, M.; Papadimitratos, P. High-precision Hardware Oscillators Ensemble for GNSS Attack Detection. arXiv 2022, arXiv:2202.11483. [Google Scholar]
- Trainotti, C.; Schmidt, T.D.; Furthner, J. Simulating the Realization of a Mixed Clock Ensemble. In Proceedings of the 2019 Joint Conference of the IEEE International Frequency Control Symposium and European Frequency and Time Forum (EFTF/IFC), Orlando, FL, USA, 14–18 April 2019; pp. 1–11. [Google Scholar] [CrossRef]
- Gödel, M.; Schmidt, T.D.; Furthner, J. Kalman Filter Approaches for a Mixed Clock Ensemble. In Proceedings of the 2017 Joint Conference of the European Frequency and Time Forum and IEEE International Frequency Control Symposium, Besancon, France, 10–13 July 2017; pp. 666–672. [Google Scholar] [CrossRef]
- Levine, J. Introduction to time and frequency metrology. Rev. Sci. Instrum. 1999, 70, 2567–2596. [Google Scholar] [CrossRef]
- Ma, L.; You, Z.; Li, B.; Zhou, B.; Han, R. Deep coupled integration of CSAC and GNSS for robust PNT. Sensors 2015, 15, 23050–23070. [Google Scholar] [CrossRef] [PubMed]
- Bruggemann, T.; Greer, D.G. Chip Scale Atomic Clocks: Benefits to Airborne GNSS Navigation Performance. In Proceedings of the International Global Navigation Satellite Systems Society IGNSS Symposium, Jeju, Republic of Korea, 18–20 October 2006; Dempster, A., Ed.; Menay Pty Ltd.: Mascot, Australia, 2006; pp. 1–16. [Google Scholar]
- Negru, S.A.; Petrunin, I.; Guo, W.; Tsourdos, A. Design and hardware-in-the-loop evaluation of a time dissemination framework for drone operations in urban environments. In Proceedings of the AIAA/IEEE Digital Avionics Systems Conference-Proceedings, Barcelona, Spain, 1–5 October 2023; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2023. [Google Scholar] [CrossRef]
- Liu, S.; Yu, B.; Liu, Y.; Zhang, K.; Qiao, Y.; Li, T.Y.; Tang, J.; Zhu, Y. The Matter of Time—A General and Efficient System for Precise Sensor Synchronization in Robotic Computing. arXiv 2021, arXiv:2103.16045. [Google Scholar]
- Jellum, E.R.; Bryne, T.H.; Johansen, T.A.; Orlandic, M. The Syncline Model-Analyzing the Impact of Time Synchronization in Sensor Fusion. In Proceedings of the 2022 IEEE Conference on Control Technology and Applications, CCTA 2022, Trieste, Italy, 23–25 August 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 1446–1453. [Google Scholar] [CrossRef]
- Lee, S.; Yuan, Z.; Petrunin, I.; Shin, H. Impact Analysis of Time Synchronization Error in Airborne Target Tracking Using a Heterogeneous Sensor Network. Drones 2024, 8, 167. [Google Scholar] [CrossRef]
- Giorgi, G. An event-based kalman filter for clock synchronization. IEEE Trans. Instrum. Meas. 2015, 64, 449–457. [Google Scholar] [CrossRef]
- Zheng, K.; Zhang, L. One Study on IEEE1588 clock synchronization algorithm based on Kalman filter. J. Phys. Conf. Ser. 2021, 1738, 012059. [Google Scholar] [CrossRef]
- Giorgi, G.; Narduzzi, C. Performance analysis of Kalman-filter-based clock synchronization in IEEE 1588 networks. IEEE Trans. Instrum. Meas. 2011, 60, 2902–2909. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).