
Diagnosis and Assessment of Pre-Fog in the Mainland Portuguese International Airports: Statistical and Neural Network Models Comparison †


Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Methods
2.2.1. Forecast Score
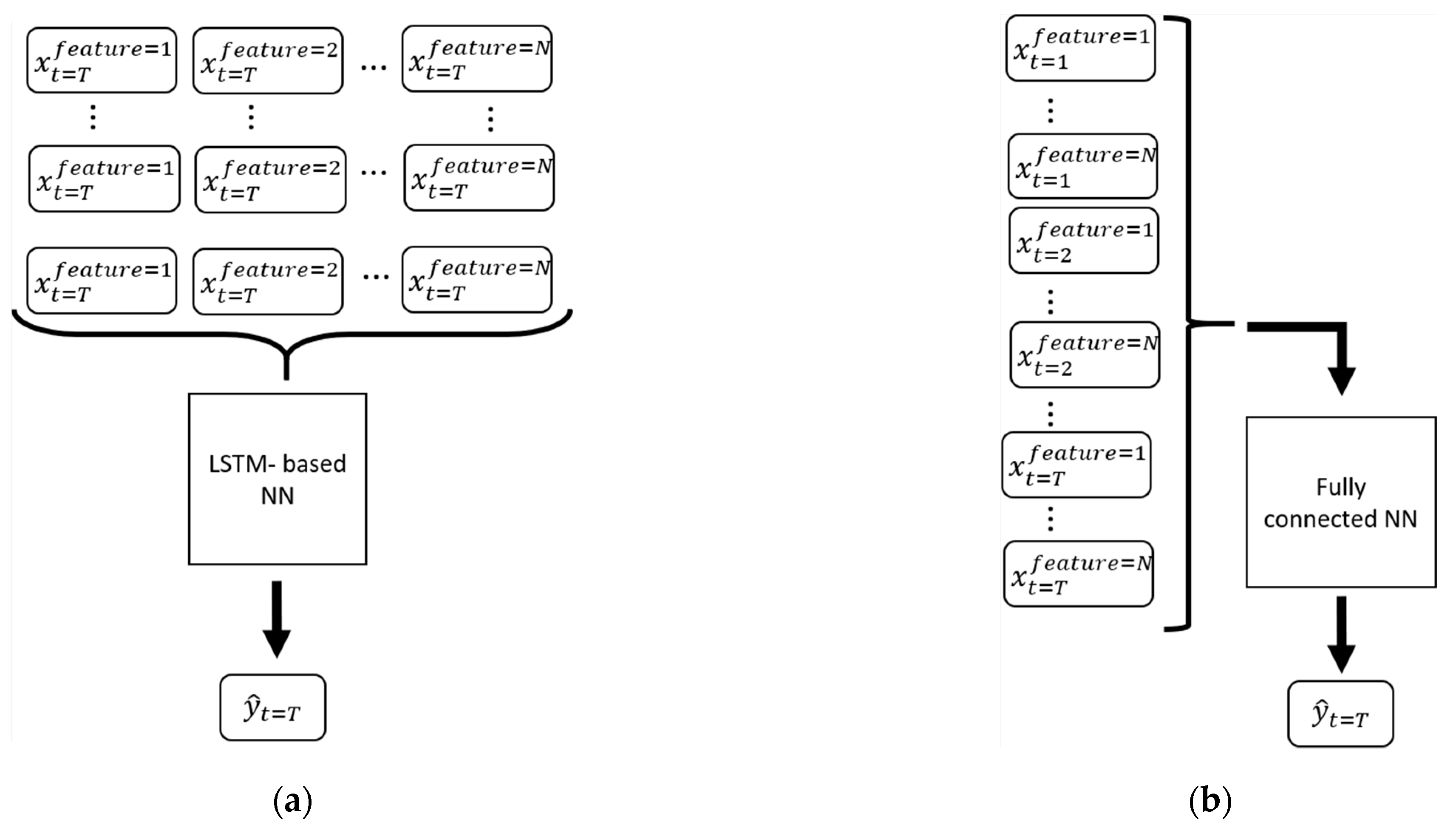
2.2.2. Neural Networks
2.2.3. Performance Indicators
3. Results
3.1. Forecast Score
3.2. Neural Network-Based Method
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Belo-Pereira, M.; Santos, J.A. A persistent wintertime fog episode at Lisbon airport (Portugal): Performance of ECMWF and AROME models. Meteorol. Appl. 2016, 233, 353–370. [Google Scholar] [CrossRef] [Green Version]
- Izett, J.G.; vanWiel, B.J.H.; Baas, P.; van Hooft, J.A.; Schulte, R.B. Dutch fog: On the observed spatio-temporal variability of fog in the Netherlands. Q. J. R. Meteorol. Soc. 2019, 145, 2817–2834. [Google Scholar] [CrossRef] [PubMed]
- Stolaki, S.N.; Kazadzis, S.A.; Foris, D.V.; Karacostas, T.S. Fog characteristics at the airport of Thessaloniki, Greece. Nat. Hazards Earth Syst. Sci. 2009, 9, 1541–1549. [Google Scholar] [CrossRef] [Green Version]
- Tardif, R.; Rasmussen, R.M. Event-based climatology and typology of fog in the New York City region. J. Appl. Meteorol. Climatol. 2007, 46, 1141–1168. [Google Scholar] [CrossRef] [Green Version]
- Houssos, E.E.; Lolis, C.J.; Gkikas, A.; Hatzianastassiou, N.; Bartzokas, A. On the atmospheric circulation characteristics associated with fog in Ioannina, north-western Greece. Int. J. Climatol. 2012, 32, 1847–1862. [Google Scholar] [CrossRef]
- Teixeira, J.; Miranda, P.M.A. Fog prediction at Lisbon airport using a one-dimensional boundary layer model. Meteorol. Appl. 2001, 8, 497–505. [Google Scholar] [CrossRef]
- Guerreiro, P.M.P.; Soares, P.M.M.; Cardoso, R.M.; Ramos, A.M. An Analysis of Fog in the Mainland Portuguese International Airports. Atmosphere 2020, 11, 1239. [Google Scholar] [CrossRef]
- Terradellas, E.; Cano, D. Implementation of single-column model for fog and low cloud forecasting at centralSpanish airports. Pure Appl. Geophys. 2007, 164, 1327–1345. [Google Scholar] [CrossRef]
- World Meteorological Oranization. WMO Guide to Meteorological Instruments and Methods of Observation; WMO: Geneva, Switzerland, 2017; Available online: www.wmo.int (accessed on 3 March 2020).
- Policarpo, C.; Salgado, R.; Costa, M.J. Numerical simulations of fog events in southern Portugal. Adv. Meteorol. 2017, 2017, 1276784. [Google Scholar] [CrossRef]
- Menut, L.; Mailler, S.; Dupont, J.C.; Haeffelin, M.; Elias, T. Predictability of the Meteorological Conditions Favourable to Radiative Fog Formation During the 2011 ParisFog Campaign. Boundary-Layer Meteorol. 2011, 150, 277–297. [Google Scholar] [CrossRef]
- Róman-Cascón, C.; Steeneveld, G.J.; Yagüe, C.; Sastre, M.; Arrillaga, J.A.; Maqueda, G. Forecasting radiation fog at climatologically contrating sites: Evaluation of statistical methods and WRF. Q. J. R. Meteorol. Soc. 2016, 142, 1048–1063. [Google Scholar] [CrossRef]
- Gardner, M.W.; Dorling, S.R. Artificial neural networks (the multilayer perceptron)—A review of applications in the atmospheric sciences. Atmos. Environ. 1998, 32, 2627–2636. [Google Scholar] [CrossRef]
- Rodrigues, E.R.; Oliveira, I.; Cunha, R.; Netto, M. DeepDownscale: A deep learning strategy for high-resolution weather forecast. In Proceedings of the 2018 IEEE 14th International Conference on e-Science (e-Science), Amsterdam, The Netherlands, 29 October–1 November 2018; pp. 415–422. [Google Scholar]
- Zhao, J.; Deng, F.; Cai, Y.; Chen, J. Long short-term memory-Fully connected (LSTM-FC) neural network for PM2. 5 concentration prediction. Chemosphere 2019, 220, 486–492. [Google Scholar] [CrossRef] [PubMed]
- Miao, Q.; Pan, B.; Wang, H.; Hsu, K.; Sorooshian, S. Improving monsoon precipitation prediction using combined convolutional and long short term memory neural network. Water 2019, 11, 977. [Google Scholar] [CrossRef] [Green Version]
- Wojtkiewicz, J.; Hosseini, M.; Gottumukkala, R.; Chambers, T.L. Hour-ahead solar irradiance forecasting using multivariate gated recurrent units. Energies 2019, 12, 4055. [Google Scholar] [CrossRef] [Green Version]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. In Advances in Neural Information Processing Systems; Currant Associates: Red Hook, NY, USA, 2015; Volume 28. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
| Observed | Not Observed | |
|---|---|---|
| Fog forecasted | HIT RATE (HR) | FALSE ALARM RATE (FAR) |
| Absence of fog | MISS RATE (MR) | TRUE NEGATIVE RATE (TNR) |
| Porto | Lisbon | |||
|---|---|---|---|---|
| Observed | Not Observed | Observed | Not Observed | |
| Fog forecasted | 17.19% | 6.34% | 5.57% | 0.84% |
| Absence of fog | 82.8% | 93.66% | 94.43% | 99.16% |
| Network Type | Sequence Length | Cross-Entropy Loss | HR (%) | FAR (%) | MR (%) | TNR (%) |
|---|---|---|---|---|---|---|
| LSTM-based NN—Porto | 6 | 0.02857 | 47.5 | 4.3 | 52.5 | 95.7 |
| 12 | 0.02800 | 47.7 | 3.8 | 52.3 | 96.2 | |
| 24 | 0.02800 | 49.3 | 3.7 | 50.7 | 96.3 | |
| 48 | 0.02829 | 52.0 | 4.1 | 48.0 | 95.9 | |
| 72 | 0.02853 | 49.3 | 3.7 | 50.7 | 96.3 | |
| FC NN—Porto | 6 | 0.02835 | 44.6 | 3.5 | 55.4 | 96.5 |
| 12 | 0.02851 | 47.7 | 3.8 | 52.3 | 96.2 | |
| 24 | 0.02867 | 45.2 | 3.7 | 54.8 | 96.3 | |
| 48 | 0.02914 | 39.6 | 3.1 | 60.4 | 96.9 | |
| 72 | 0.02895 | 38.8 | 3.2 | 61.2 | 96.8 | |
| LSTM-based NN—Lisbon | 6 | 0.01364 | 50.0 | 3.1 | 50.0 | 96.9 |
| 12 | 0.01443 | 48.9 | 3.5 | 51.1 | 96.5 | |
| 24 | 0.01395 | 51.8 | 3.2 | 48.2 | 96.8 | |
| 48 | 0.01411 | 46.3 | 3.3 | 53.7 | 96.6 | |
| 72 | 0.01385 | 51.5 | 3.5 | 48.5 | 96.5 | |
| FC NN—Lisbon | 6 | 0.01363 | 47.8 | 3.3 | 52.2 | 96.7 |
| 12 | 0.01387 | 43.8 | 2.9 | 56.2 | 97.1 | |
| 24 | 0.01358 | 47.4 | 3.1 | 52.6 | 96.9 | |
| 48 | 0.01376 | 51.1 | 3.0 | 48.9 | 97.0 | |
| 72 | 0.01419 | 44.9 | 3.2 | 55.1 | 96.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerreiro, P.M.P.; Cruz, G. Diagnosis and Assessment of Pre-Fog in the Mainland Portuguese International Airports: Statistical and Neural Network Models Comparison. Environ. Sci. Proc. 2021, 8, 34. https://doi.org/10.3390/ecas2021-10697
Guerreiro PMP, Cruz G. Diagnosis and Assessment of Pre-Fog in the Mainland Portuguese International Airports: Statistical and Neural Network Models Comparison. Environmental Sciences Proceedings. 2021; 8(1):34. https://doi.org/10.3390/ecas2021-10697
Chicago/Turabian StyleGuerreiro, Pedro M. P., and Gonçalo Cruz. 2021. "Diagnosis and Assessment of Pre-Fog in the Mainland Portuguese International Airports: Statistical and Neural Network Models Comparison" Environmental Sciences Proceedings 8, no. 1: 34. https://doi.org/10.3390/ecas2021-10697
APA StyleGuerreiro, P. M. P., & Cruz, G. (2021). Diagnosis and Assessment of Pre-Fog in the Mainland Portuguese International Airports: Statistical and Neural Network Models Comparison. Environmental Sciences Proceedings, 8(1), 34. https://doi.org/10.3390/ecas2021-10697