1. Introduction
Despite the relatively lower fixed cost of the open-pit mining method, applying the open-pit mining method can be precluded due to geotechnical, operational, and environmental issues. The extraction of a high volume of overburden before ore extraction, high stripping ratio, pit wall failure, and reclamation cost are common challenges that considerably impact the feasibility of an open-pit mining method. In such cases, underground mining methods would be a good alternative [
1]. Underground mining methods such as sublevel caving (SLC), which can be applied in the hard rock mass, have become more popular because of their high potential production rates and low operating costs. Recent technological developments and improved solutions for designing, planning, and modeling SLC operations ramp up SLC application at greater depths in rock masses with more significant geotechnical challenges than ever before [
2].
As an underground mining method, SLC requires the investment of massive funds consisting of capital and operating costs. Thus, an integrated planning process through comprehensive studies to mitigate risks and maximize value is of the essence. Mine planning is considered a powerful tool to ensure the application of SLC. The implementation of operations research (OR) techniques in the mining industry dates back to the early 1960s [
1]. Since then, optimization techniques have been extensively applied to solve varied mine planning problems. Depending on how the problems are modeled, several techniques are available for solving mine production scheduling optimization. First, a model representing the system behavior is constructed using a scientific and mathematical approach. Then, different algorithms are used to solve the model and obtain the optimal solution. Musingwini [
3] categorizes OR models into five main groups: optimization models, simulation models, network models, multi-criteria decision-making models, and global optimization models. Optimization models use an exact algorithm to produce a single optimal solution for a maximization or minimization problem. Simulation models are mainly used to capture the uncertainty associated with the problem using an iterative approach that compares different scenarios. It does not necessarily generate an optimal solution, but it is helpful for risk analysis. A network model takes advantage of the graphical approach. The network model is a database model showing the relationships among the objects. The schema of a network model is a graphically aided algorithm including nodes and connecting links. In the network model, the objects are assumed as nodes and the relationships between the objects are depicted as arcs. They usually result in a single optimal solution. The multi-criteria cecision-making model is employed to make a decision that is subject to incorporating several criteria simultaneously. Finally, the global optimization model utilizes a heuristic algorithm to make an optimization problem more tractable without necessarily producing an optimal solution.
The production scheduling problem can be addressed by manual planning methods, heuristic algorithms, and exact algorithms. Exact algorithms are able to find an optimal solution by taking advantage of operation research techniques, but manual planning methods or heuristic algorithms will not lead to an optimal solution [
4]. Although heuristic algorithms can produce practical production schedules in a reasonable solution time, schedulers have no easy way to judge the quality of these schedules relative to the best schedule. In such cases, mathematical programming techniques can be used to produce optimal production schedules for underground mines [
5]. Mathematical programming models are formulated to generate an optimal mine extraction sequence while satisfying geotechnical, operational, environmental, and economic constraints [
6]. There is a direct link between tractability and the size of a model. This issue conducts a lot of research to develop a tractable and solvable model in a reasonable period of time.
This paper is organized as follows:
Section 2 introduces the SLC method.
Section 3 represents the general definition of a mathematical model and the application of these models in production scheduling. In
Section 4, the production scheduling process in mines is described, relevant literature is reviewed in production scheduling in mines, and all models presented to solve the SLC production scheduling problem are outlined.
Section 5 concludes the paper and proposes new ideas for future researches.
2. Sublevel Caving Method
In recent years, surface and underground mass mining methods have experienced burgeoning interest as the mining sector is willing to exploit massive orebodies faster and more economically. Underground mining methods such as block-, panel- and sublevel-caving continue to be the top priority for deeply situated massive orebodies because of the high potential production rates and low operating costs. In addition, recent technological developments increase the application of caving operations on a larger scale, at greater depths, and in rock masses with greater geotechnical challenges [
2].
Originally, SLC was applied in the weak ground where collapse was more likely to happen due to the timber supports’ removal. Once each support was removed, the ore would cave and be mucked out to the perimeter drift. The next support would remain until the allowable dilution had been reached. The production rate was slow and resulted in poor ore recovery with high dilution. Later applications of SLC were used in relatively stronger ground with weak hanging walls to facilitate the caving process and avoid creating large voids. In this version of SLC, the ore did not cave anymore, and instead, the host rock above and immediately adjacent to the ore would cave. Strong ore led to the use of a drill-and-blast operation to extract the ore, which took the role of support removal. With the introduction of drill-and-blast, SLC could be utilized in orebodies with small footprints leading to natural cave development and also dipping geometry unfavorable for block caving. In recent times, the method has been applied to orebodies with strong hanging walls, where some techniques have been used to assist caving. Due largely to advances in drilling and blasting technologies, sublevels are conducted in 20 to 35 m vertical intervals, which are far higher than the traditional application of this method. The production drifts are drilled across the orebody in each level, and the haulage drift is developed to access the production drifts for ore transportation, services, and ventilation [
2].
In an SLC mine, the orebody is divided into several vertical intervals through several horizontal openings called production drifts. A sublevel is known as the vertical interval formed between two production drifts on different levels [
7]. Subject to the mine layout (transverse or longitudinal), a perimeter drift is driven along or perpendicular to the strike of the orebody with a safe distance from the ore–waste contact. The perimeter drift is established to access the production drifts, ore transportation, services, and ventilation purposes [
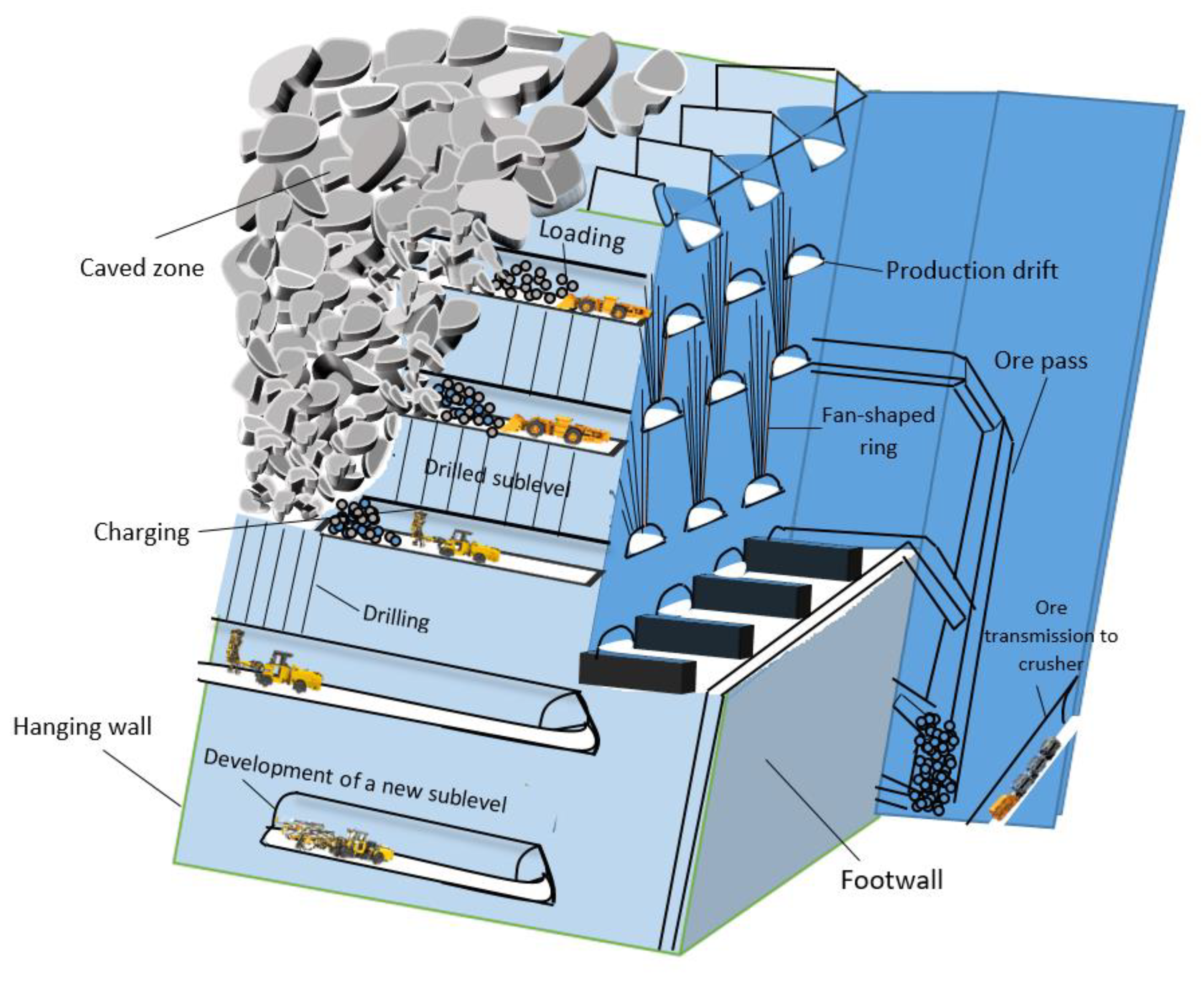
2]. The major mining activities are divided into three groups: drifting and reinforcing; production drilling and blasting (ore fragmentation); and material handling, including ore drawing, loading, and transportation (see
Figure 1).
Mining operations start at the uppermost sublevel and proceed sequentially downwards. In each sublevel, the in-situ ore is drilled in a fan-shaped design along the production drift at a constant horizontal distance, called burden. Then, the ore is blasted, slice by slice, from the hanging wall to the footwall in a retreating manner [
7]. The restricted opening in the roof of production drift allows the blasted and caved materials to be flown under gravity, called a drawpoint. After finishing drill-and-blast operations, electric- or diesel-driven load-haul-dump (LHD) machines transport the broken ore from the drawpoints to the ore passes. A group of ore passes is positioned in certain spaces along the orebody strike. As more material is loaded, the void created at the drawpoint is filled by the fragmented material above the drawpoint. Thus, a void will be created around the blasted ring which exposes the hanging wall to the loss of support, resulting in the disintegration of rock at the ore and waste interface. The hanging wall starts to cave and fill the void [
9]. Depending on the regularity of the orebody, train systems or tuck haulages are utilized to transport ore from the ore passes to the crusher stations. After crushing, the ore is hoisted with a skip system to the surface (
Figure 1) [
10].
Once the production drifts have been excavated and reinforced, a slot drift on the far ore–waste contact or individual slot raise at the end of each production drift is placed to provide a free face for the first production ring. Minimizing the hole deviation when drilling is crucial because it will affect the fragmentation of the blasted ore and consequently the flow of the caving rock mass [
11]. To enable optimal coverage for drilling and to allow for the downward flow of caved material, production drifts are staggered in a zig-zag order between the levels [
10].
Figure 2 shows an upward production ring drilled in a fanned shape with a specific burden along with the production drifts orientation.
Production management and draw strategy are imperative in SLC operations to accurately predict the ore and waste flow from the cave after production commences. The draw strategies and production management plans need to be variable and adaptable to the constantly changing operational situations in order to cope with unpredictable conditions such as the early inflow of waste, hang-ups, the arrival of large oversize material at drawpoints, and unscheduled equipment breakdowns and production incidents [
2]. As a result, developing a draw control strategy that simultaneously incorporates mine sequencing and material handling systems while minimizing mining costs and dilution objectives is a crucial step in the SLC mining method [
12]. An effective draw control strategy maximizes ore recovery while minimizing dilution or enables the system to delay dilution entry in the drawpoint by utilizing some countermeasures to stop dilution [
13].
Table 1 represents the list of current mining projects utilizing the sublevel caving method in different parts of the world.
3. Mathematical Programming Methods
Decision-making and finding the best choice are significant challenges that may greatly impact the success or failure of an operation. The most crucial issue is to formulate real-world problems in the form of mathematical programming models. The process of solving a real-world problem with a mathematical programming model consists of the following steps [
14]:
Step 1: identify and define the problem
Step 2: collect data and present the model
Step 3: solve the model
Step 4: validate the model
Step 5: provide results
In many real cases, the size of the model precludes planners from solving the scheduling problem simply. For example, in integer programming (IP), the size and solution time of the models are highly affected by the number of binary variables and the structure of constraints, which can make the model intractable. On the other hand, the key obstacle so far has been the complexity and uncertainty associated with real-life problems. Thus, carefully formulating the constraints and using heuristic algorithms copes with the tractability of mathematical models in scheduling problems.
A mathematical model specifies the mine sequence in the mining context to achieve a specific goal related to the mine production strategy while incorporating all geotechnical, operational, environmental, and marketing constraints [
15]. Deterministic scheduling models obtained by mathematical programming can generate an optimal solution exactly. However, their application is restricted by the large size of the problem making the model intractable. Furthermore, exact methods have their own limitations because models are a simplification of reality. Therefore, in many cases, production scheduling optimization problems do not perfectly match the exact algorithms, and heuristic approaches can be used to provide a procedure to reduce solution time [
3]. Thus, designing a model including a reasonable number of constraint and decision variables, especially binary variables, is high of importance. Therefore, applying some size reduction procedures such as heuristic algorithms prior to applying mathematical models is the best approach in many cases [
4].
4. Production Scheduling in Mines
Production scheduling specifies the extraction sequence, which can be different based on the mining method and the level of scheduling’s timeframe. In other words, production scheduling defines the tonnage and grades in each time period over the time horizon [
16]. An optimal schedule is expected to be sufficiently robust to reduce costs, increase equipment utilization, optimize recovery of marginal ores, and maintain production rates and product quality. Common strategic objectives in the industry are net present value (NPV) maximization, cost minimization, and reserve maximization. Relying only on manual planning methods or heuristic-based algorithms will generate non-optimal mine schedules [
17].
Depending on the precision and time horizon of the plan, a hierarchical process divides mine planning into strategic (long-term), tactical (medium-term), and operational (short-term) levels [
18]. Strategic scheduling indicates the maximum profitable envelope within the orebody, production sequences, and production rate. Tactical scheduling defines the annual mining sequence based on the production rate determined at the strategic level. Finally, operational scheduling must detail how operations in the near future will contribute to the achievement of the long-term plan [
1].
This exact approache, specifically, mixed-integer programming (MIP), has been widely used in production scheduling problems [
4]. However, the tractability of exact algorithms is detrimentally affected by its mathematical structure and moderately large size which makes it impossible to solve a production scheduling problem in a reasonable time [
6]. Optimization-based heuristic algorithms can be used, which incorporate the essential characteristics of the mining system while remaining mathematically tractable [
19]. In underground mining methods, the simulation-optimization approach is also applied to incorporate the uncertainty associated with mine operational parameters, such as velocities, capacities, maneuver times, failure times, and maintenance times, which are modeled using the probability density functions based on the historical data [
15]. Despite frequent intervention and the lack of a way to judge optimality, simulation and heuristics are able to handle non-linear problems as part of the scheduling procedure [
19].
In surface mining methods, particularly open-pit mining, production scheduling optimization is an indispensable part of designing and planning; nonetheless, studies on optimization of the ultimate mine limit and production planning in other surface mining methods are still limited and primitive [
4]. There are several publications providing models to address different aspects of the production scheduling problem in mines. Early applications of optimization models in the mining industry concern open-pit mining [
20,
21]. Frimpong et al. [
22], Caccetta [
23] and Osanloo et al. [
24] provided models to solve surface mining problems, including the block extraction sequencing in open-pit mines.
Despite the proliferation of optimization techniques used in mine planning, optimization in underground mine planning has been less widely developed than in open-pit mine planning [
3]. This is mainly because of the diversity of underground mining methods, such that each method has unique designs and operations to suit the specific characteristics of each mineral deposit [
3]. The reduced flexibility in underground mining operations imposed by geotechnical, equipment, and space constraints makes the optimization problem more complicated [
25]. The first attempts of optimization models in underground mining are related to Williams et al. [
26] and Jawed [
27] using linear programs (LP) to plan sublevel stoping in a copper mine and room-and-pillar in a coal mine, respectively. All these models assumed continuous-valued variables. In fact, LP models cannot capture discrete decisions about whether or not to mine a particular production block at a specific time. Chanda [
28] and Trout [
29] optimized underground mine production schedules using integer programming (IP). Chanda combined LP with simulation and used heuristics procedures to address discrete decisions in a typical block caving mine. Trout’s scheduling model maximized NPV with a constraint set incorporating block sequencing, equipment capacity, and backfill indicators. However, the computer reached memory capacity before the employed algorithm terminated. Carlyle and Eaves [
30] formulated a more tractable IP model to maximize revenue from Stillwater’s sublevel stoping platinum and palladium mine, giving near-optimal solutions without using any special techniques reduces solution time. Sarin and West-Hansen [
31] aimed to maximize NPV utilized Benders’ decomposition-based methodology to expedite the solution time of a coal mining operation. Pourrahimian et al. [
32] developed a theoretical optimization framework based on a mixed-integer linear programming (MILP) model for block cave long-term production scheduling with the objective function of maximizing the NPV. To overcome the size problem of mathematical programming models and generate a near-optimal schedule, they formulated three MILP models for three levels of problem resolution: cluster level, drawpoint level, and dewpoint-and-slice level. The methodology was also tested in a prototype open-source software application with the graphical user interface drawpoint scheduling in block-caving (DSBC). Mine operations are extremely closely tied to several sources of uncertainties. The level of uncertainty can be intensified in short-term production scheduling. Therefore, schedules that are more likely to be reproduced in reality should be focused on high operational adherence when executed. Fabián Manríquez et al. [
15] proposed a generic simulation-optimization framework that combines a MIP model with a discrete event simulation (DES) to generate short-term production schedules using an iterative approach. The proposed framework was applied to a real-scale bench-and-fill mine. This approach dramatically improves the operational adherence of the short-term schedules generated over iterations. However, as future research, it was suggested to apply this framework to massive and selective underground mining methods as well as open-pit mines. None of the aforementioned models apply to the sublevel caving method.
Production Scheduling in SLC
There are a limited number of studies for SLC production scheduling. This can be because SLC processes some specific constraints, making it more complicated than the open-pit and even other underground mining methods. Nevertheless, successive efforts at SLC production scheduling have been undertaken in the Kiruna mine, the second-largest underground mine in the world, located in northern Sweden.
Almegren [
33] provided a mathematical model using the machine placement as the basic mining entity to provide a long-term production scheduling of the Kiruna mines. The author demonstrated the promising application of Lagrangian relaxation as a practical technique to reduce the number of binary variables, but this method was not used in the final formulation due to some significant drawbacks claimed by Zhao and Kim [
34]. They pointed out that there are two main drawbacks. One is the gap phenomenon. The other assumes that complete blocks are mined within each time period, which is unreasonable because mining of each block normally takes more than one time period [
34]. Eventually, the original model was reformulated as sub-optimal multiple single period models. The proposed model solely considered a one-month time frame, forcing the planner to run the sum models 60 times to generate a five-year schedule. This sub-optimal plan failed to consider the consequences of the actions in one time period to an earlier time period, but it at least saved execution time. In addition, this research showed that it is impossible to fully predict the flow of blasted ore, which can add some uncertainty to the production planning process.
Topal [
35] formulated a model that combined both the Kiruna mines’ long- and short-term production schedules at the production block level. The model solved one-year subproblems with a monthly resolution in order to provide a five-year schedule. The model included a reduced number of binary variables and continuous variables that tracked the amount of the various ore types in each production block extracted in each time period. However, the proposed model was not solvable in its original form.
Dagdelen et al. [
36] set up the sequencing constraint to minimize the deviation from planned quantities of three ore types of the Kiruna mines. The iron ore was mined from a limited number of sublevels in each multi-time period (12 months). Because of exceeding the number of integer variables from the maximum capacity of the solver, the “What’s Best” software package by Lindo System Inc., one-year subproblems were proposed to achieve production plans for a seven-year time horizon. Therefore, to obtain a seven-year production schedule, the model had to be run seven times.
Kutcha et al. [
5] improved the tractability of their MILP model by two techniques in a five-year time horizon for three ore grades. First, they aggregated 12 production blocks into one single machine placement. Then, the earliest and the latest start date were defined for each machine placement according to sequencing, shaft group (LHD availability), and demand constraints. Due to sequencing and shaft-group constraints, the requisite number of machine placements surrounding the given machine placement needs to be mined before it starts mining, indicating the earliest start date of the given machine placement. Moreover, based on demand constraints and bounds on a reasonable amount of deviation between demand and production and preventing the underlying machine placements from being locked in, the start mining date of a machine placement must be early enough to produce the required amount of ore. However, they reduced the number of binary variables and increased the tractability of the model, but using more robust methods to determine the latest start date for each machine placement was still required. They were also looking for a way to develop short-term production schedules with the time fidelity of days.
Newman et al. [
37] designed a heuristic-based algorithm to directly solve the Kiruna mine production scheduling problem at the machine placement level and the finer level: the production block level. They solved an aggregated model to determine a set of reasonable starting times for each machine placement, restricting the model to a subset of start time choices. In each machine placement that can be mined in a single time period, the demands and the amount of ore were aggregated into data corresponding to phases. Each phase consists of an equal number of consecutive periods. After solving the aggregated model, some extra constraints are added to the original model to tighten the search space. Despite that this heuristic procedure substantially reduced the solution time as well as deviations from planned production quantities by approximately 70% over those obtained from the model with the only long-term resolution, it can only be applied for time horizons of 2 years or fewer.
Newman et al. [
6] generated solutions with deviations that comprised about 3–6% of total demand in about a third of an hour by developing an optimization-based decomposition heuristic. The formulation incorporates both short- and long-term production scheduling decisions to closely align production and demand quantities for all ore grades and time periods. The heuristic consists of two phases: (i) solving five subproblems of the original model, and (ii) using information gained from the subproblem solutions to solve a modified version of the original model. Three subproblems penalize deviations only for each of three ore grades. The other two subproblems penalize either overage or underage production, resulting in adding several constraints to the original model. All subproblem solutions are feasible for the original model. Since all subproblems are run in parallel, the solution time will be the maximum among the five solution times. However, consideration of the subproblems independently does not guarantee an optimal solution. It is quite possible that the schedule obtained by one subproblem is not part of a favorable solution for the whole original model.
Shenavar et al. [
4] applied the IP model using the MATLAB programming platform to formulate the long-term production scheduling for a 2D representation of a real sublevel caving mine, the Golbini bauxite mine in Iran. An operating period of 8 years was considered in the production schedule model. They took a four-step procedure to generate the optimal production schedule. First, the economic block model was established based on the geological model. Then, they applied the floating stope boundary optimizer to remove the unnecessary blocks from the block model. In the third step, an integer linear programming (ILP) model was run to determine the maximum NPV and the optimal mining sequence. Finally, when the mining sequence was indicated, the mine development works were scheduled with respect to the mining sequence to the extent required annually. However, designing a 3D production schedule and analyzing, more precisely, the effect of mining developments on production planning should be addressed in future studies.
Table 2 summarizes all research performed in the field of SLC production scheduling. All models in
Table 2 have been applied to the Kiruna iron mine in Sweden except for the last one, Shenavar et al. (2020), that has been used in the Golbini bauxite mine in Iran.
5. Conclusions and Recommendations
SLC is a cost-effective method in large-scale operations with a high production rate, less upfront development, and maximum use of automated equipment. In a smaller-scale operation where the capacity benefits are less achievable, SLC can be utilized as a selective method with lower production rates. As with other underground mining methods, SLC requires a considerable amount of investment. In a real case, the deviation between the production schedule and mine operation can affect the continuity of mine operations. Thus, a production schedule that considers all sources of deviation should be improved and applied to underground mines, especially SLC.
Almost all research performed in the field of SLC has applied MIP to obtain an optimal production schedule. According to the mine strategies, proposed models focused on NPV maximization and deviation minimization between productions. They demanded quantities of ore while satisfying constraints including ore reserve, mine precedence, and integer variable restrictor, but none of them have considered any type of uncertainty, which is the inherent characteristic of SLC mine operations. As such, developing a mathematical model that can be reproduced in reality and enables the mine planner to establish and compare different mining scenarios to produce an optimal mining schedule is highly important.
In SLC operations, loading at the drawpoint is complex because of the confined blasting conditions, chaotic material flow, and continuous mixing of ore and waste above the drawpoint. The draw strategies and production schedules are the most important concerns which need to be adaptable to the constantly changing situations in an SLC mine. One of the challenges encountered by mine planners is considering different types of uncertainty, including operational, geological, and economic factors during the generation of long- and short-term mine production schedules. The schedule should consider in detail unpredictable operational conditions such as the early inflow of waste, hang-ups, arrival of oversized materials at drawpoints, and unscheduled equipment breakdowns and production incidents. Thus, developing a draw control strategy that incorporates sequencing and scheduling, production, and material handling systems that simultaneously minimizes mining costs and dilution objectives is a crucial step in SLC mining.
Geological factors such as the natural variability in orebody geometry and grade, ground conditions, and rock properties make each SLC project unique. Furthermore, economic factors such as variable ore prices and exchange rates also should be considered to provide a more realistic production plan. These uncertainties mean that effective risk management is required to be robust economically and technically to ensure that mine operations are feasible and profitable.
The fragmentation of blasted ore and caved material and flow characteristics affect the mine’s gravity flow and ore recovery performance. While considering the material flow in the presence of blasting parameters, more realistic production scheduling plans will be generated. In an SLC mine, every production ring is blasted against the combination of previously blasted ore and waste located in and around the production drift, which makes the blasting operation unique compared to other underground mining methods. In order to ensure that satisfactory fragmentation is achieved and the subsequent processes will be undertaken properly, designing a production drilling and blasting pattern suitable for the orebody characteristics is a determinant input into the overall layout of the SLC mine. In fact, the shape of the production ring may vary rarely, but the drilling and blasting parameters, including hole diameter, number of holes in the ring, drill-hole toe spacing, production ring burden and dump angle, and explosive column densities and lengths can all be modified over the life of the mine. Therefore, applying appropriate drilling and blasting operations will reduce the degree of uncertainty dramatically.
In addition to drilling and blasting parameters, developing a comprehensive production plan is subject to some other production parameters. The layout orientation is a crucial factor that has a significant effect on the success of mine operations. The layout directly affects the ore recovery, drilling and blasting effectiveness, excavation stability, and mine development cost. Sublevel height, production drift spacing, production drift shape and size, equipment employed, fleet size and number, and materials-handling capacity should be taken into account to create a holistic production plan.







{kind=link}
{kind=link}