1. Introduction
Mining is a process of extracting valuable materials from underground and open pit mines. These materials, known as ores, are typically a combination of minerals, natural rocks, and sediments, which have economic value when refined. During the last few decades, mining has played an important role in the economic development of several countries, especially in emerging countries [
1]. However, mining is a very complex industrial operation, and its progress must contain several planning stages, starting with prospecting for ore bodies and ending with the final reclamation of the land after the mine is closed. In addition, a mining project must maximize the net present value (NPV), extracting the ore at the lowest possible cost over the mine’s life cycle and, therefore, making the effort of such labor worthwhile.
In open pit mines, where operating costs are very high, it is even more essential to maximize the productivity of a minimum cost. Among the most expensive open pit mine operations, haulage and material handling stand out, accounting for 50–60% of the total operating costs [
2]. In order to reduce this cost and thereby maximize the NPV of the mining project, a fleet management system (FMS) is required, whose goal is to solve two problems: (i) find the shortest path to travel between each pair of locations (loading and dumping sites) in the mine (shortest path problem) and (ii) determine the number of truck trips required for each path and then dispatch the trucks to the locations in real-time, which is the focus of this paper.
Hence, the FMS can be single-stage or multi-stage. The single-stage approaches dispatch trucks without considering any production targets or constraints and typically consist of heuristics based on rules of thumb [
3,
4]. However, multi-stage approaches have a great advantage over single-stage approaches by dividing problem into two sequential sub-problems [
5,
6]. This division into stages introduces the second level of knowledge to the FMS, which improves the quality of the solutions, as well as allowing them to better adapt to real scenarios with uncertainties. The first sub-problem consists of efficiently allocating haulage resources for excavation activities based on truck loads, aiming to maximize the truck productivity (truck and shovel allocation problem—upper stage), and the second sub-problem consists of dispatching trucks to a loading or a dumping site (truck dispatching problem—lower stage) [
7].
Although it has not been extensively investigated as the upper stage sub-problem, the truck dispatching problem is essential for the FMS. It is by solving the lower stage sub-problem that planning comes into play to achieve the production targets defined in the previous stage. Formally, the truck dispatching problem, which can be treated as an assignment problem [
5,
8] or a transportation problem [
9,
10,
11] is real-time decision making associated with the destinations of trucks to satisfy the production requirements in a mining operation. To achieve these requirements, one or more objectives are usually defined, including the maximization of mine productivity or the minimization of truck inactivity (whether through idle time, waiting time, or loading/dumping time). Therefore, several formulations of this optimization problem have already been proposed, as well as different solutions to these formulations.
Since the truck dispatch problem also occurs in fuel and package deliveries, taxis and ride-hailing services, and other industries that have to manage fleets of vehicles, some approaches used to solve the dispatch problem in other contexts have been naturally adopted for the problem applied in the mining industry. However, the transition of approaches in different contexts can be inappropriate. In open pit mines, some important particularities must be considered in the optimization problem. For example, the travel distance between two locations is usually short, the time taken for the truck to load or dump is often longer than the travel time, and the frequency of demand at each location is often higher [
2].
Therefore, the efficiency of a solution to the truck dispatch problem aimed at maximizing the mine’s productivity is strictly related to the fleet size and the haulage distances. A fleet with an insufficient number of trucks (under-truck) will result in substantially unproductive periods and a fleet with a high number of trucks (over-truck) may lead to queues for loading or dumping. Thus, several methods have been proposed to select the optimal size of the truck fleet in the truck dispatching problem, i.e., the number of trucks is considered to be a decision variable, which avoids the aforementioned problems. Generally, these methods are based on match factor [
12,
13,
14,
15], artificial intelligence [
16,
17,
18], operations research [
19,
20,
21,
22], life cycle cost analysis [
23,
24], or discrete event simulation [
25,
26,
27]. However, the major drawback of these works is that they were developed to address only the equipment selection and sizing problem, in particular, the size of the haulage fleet handling the dump materials, and typically disregard the truck dispatch rules [
15]. On the other hand, dispatching rules have been studied apart from fleet sizing, based on optimization models with operations research [
28,
29], dynamic truck allocation [
30,
31], heuristics with real-time data [
32,
33], simulations [
34], or artificial intelligence [
35]. This paper sheds some light on the interface between long-term fleet sizing with productivity estimation and its realization in the short term with a specific dispatch rule.
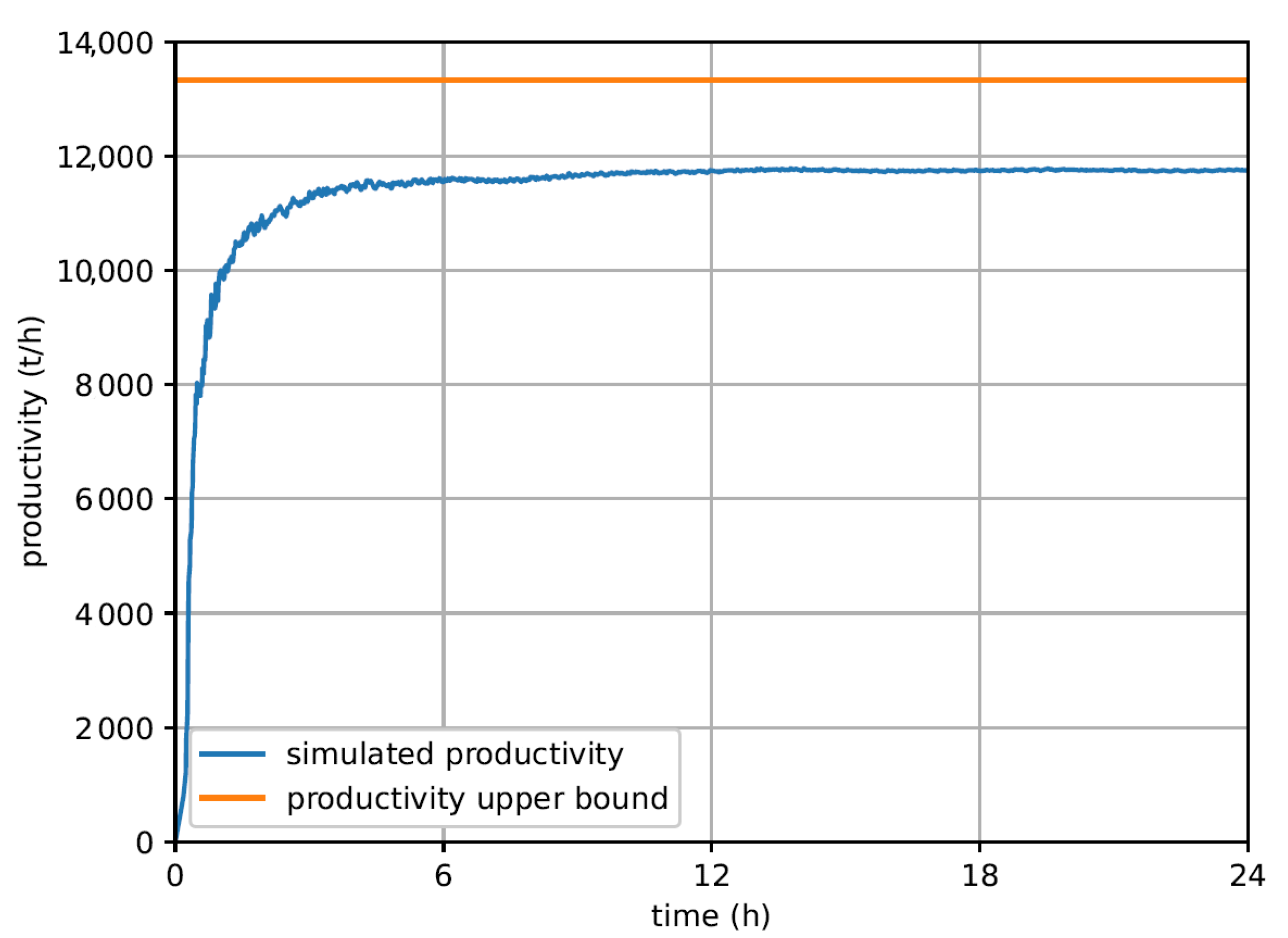
From this perspective, we define a linear programming model that derives the upper bound for mine productivity by considering trucks of a heterogeneous fleet allocated in cycles (pairs of loading–dumping sites). In addition, we propose a simple truck dispatch rule that leads to mine productivity, found in a discrete event simulation, close to this upper bound. Through a case study in an open pit mine in Brazil, we also show that the simulation takes into account fleet size problems, and the results obtained can be feasibly implemented in real-world situations.
4. Conclusions
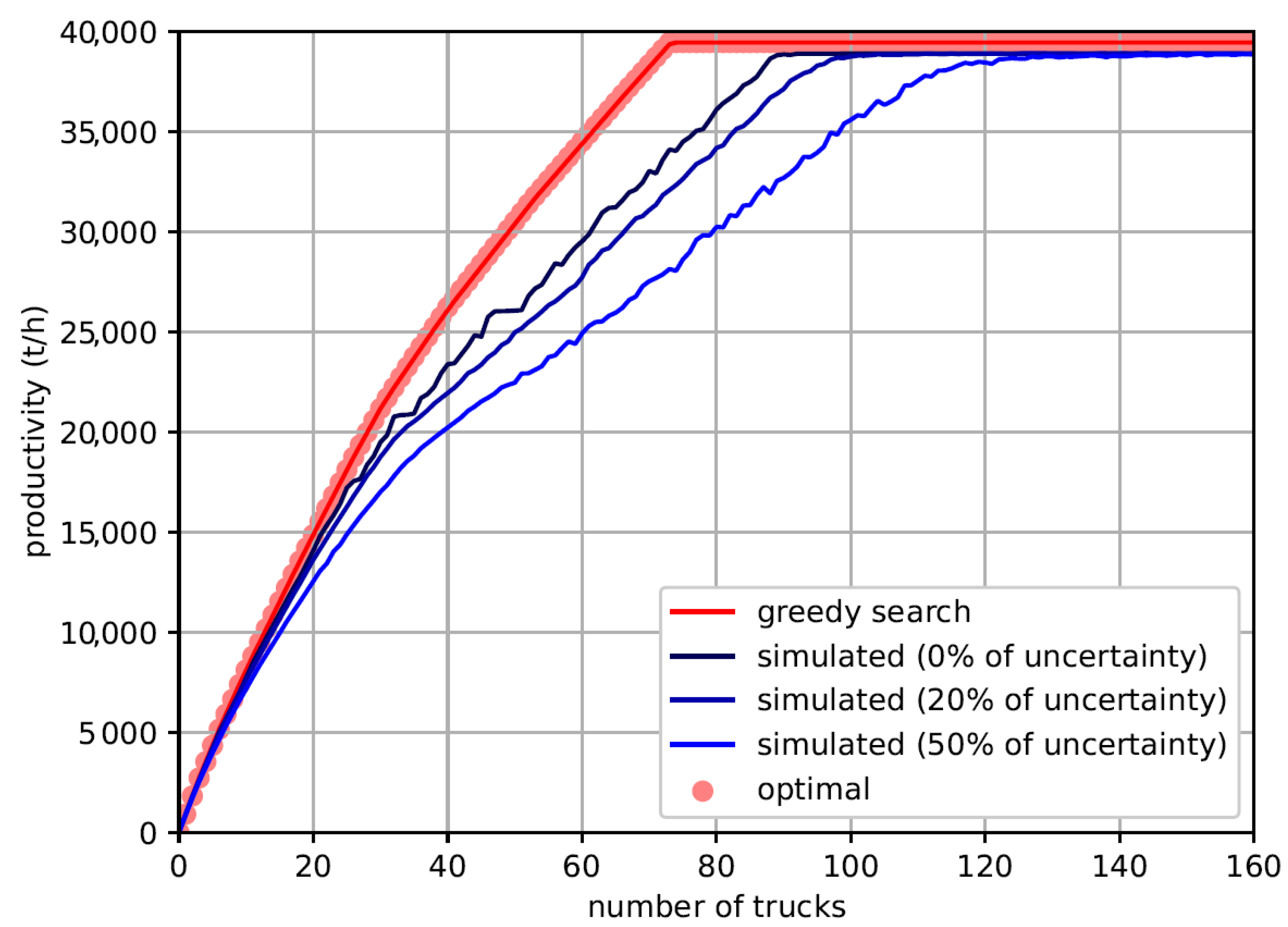
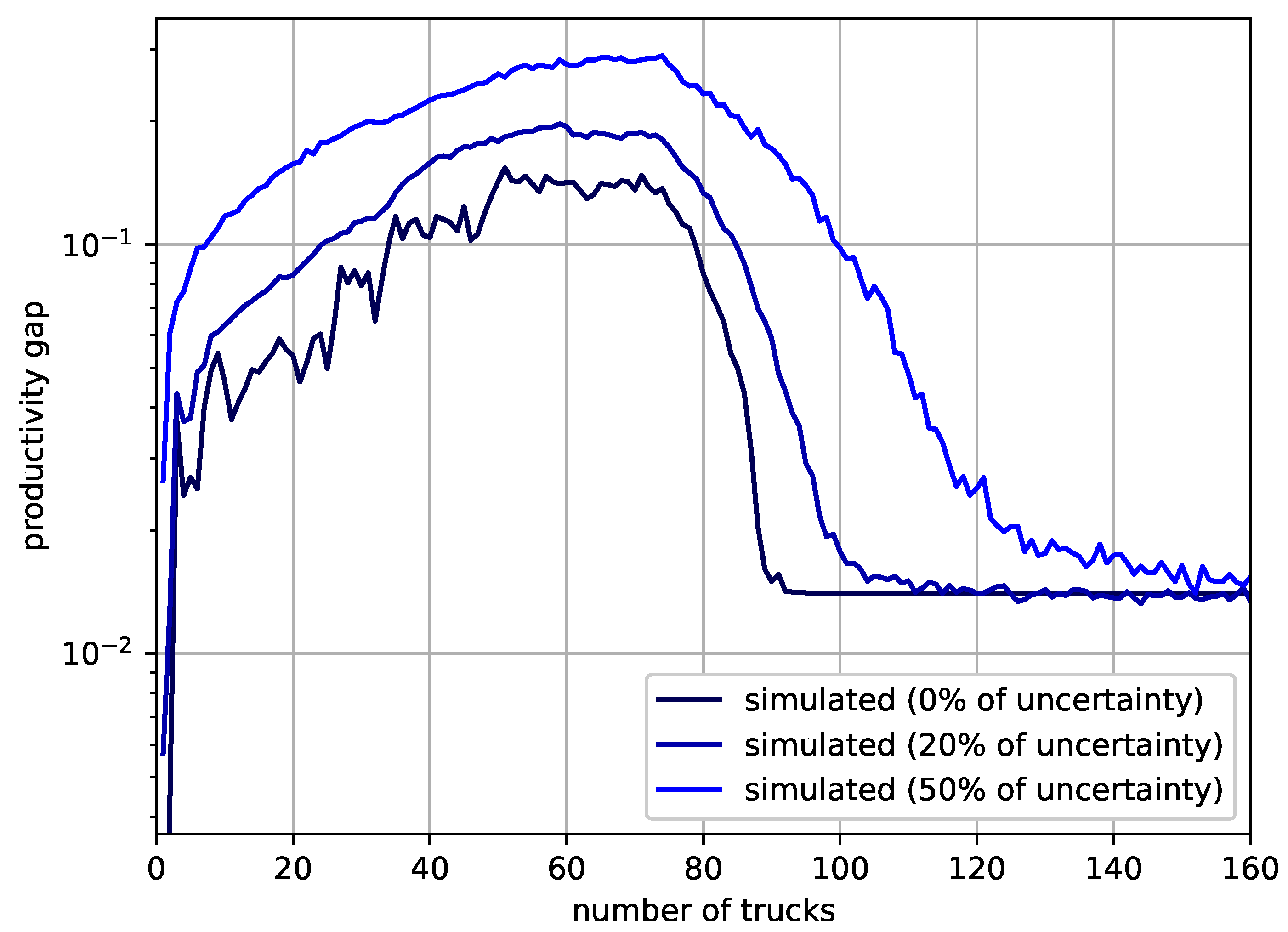
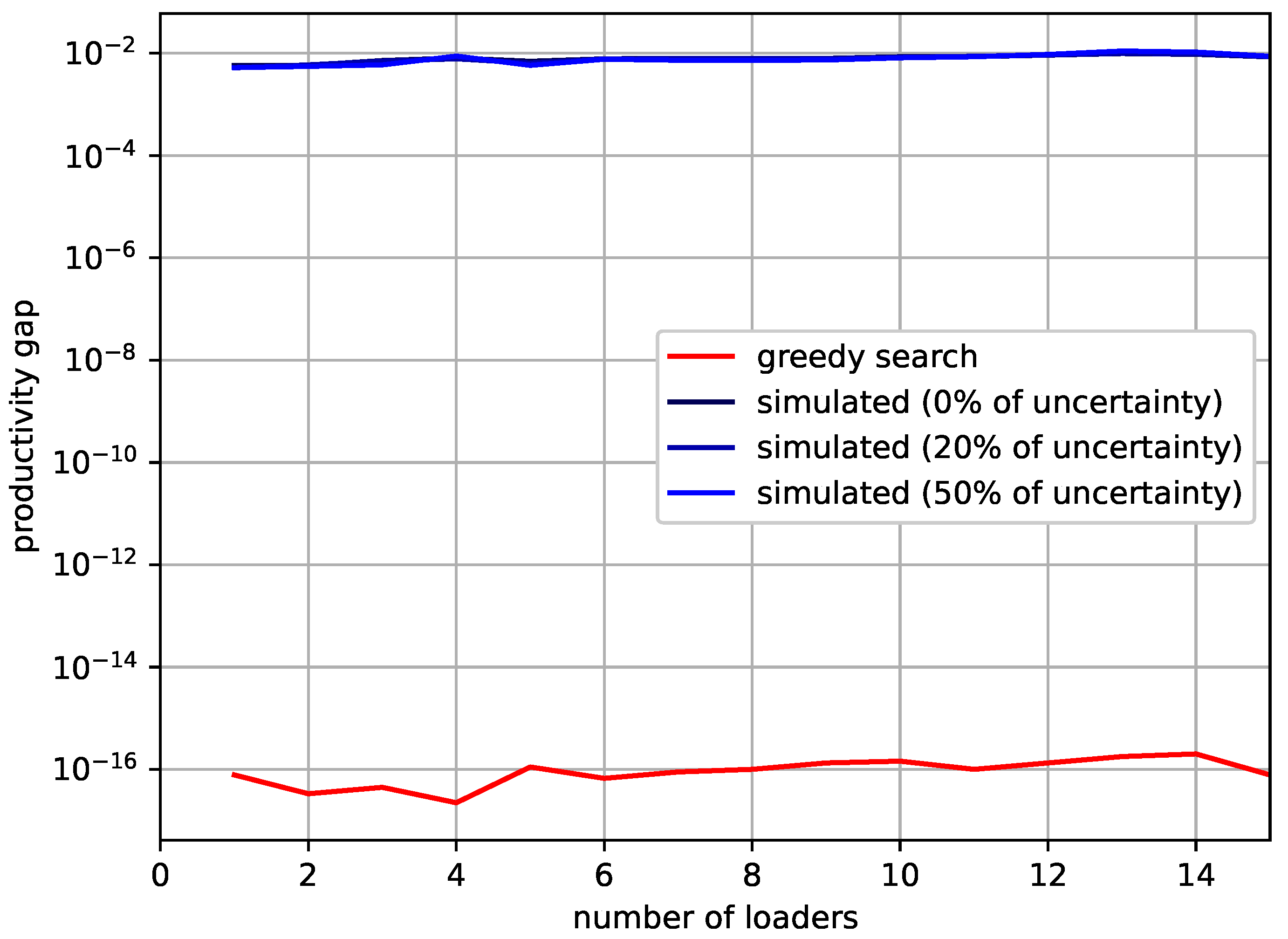
The mine productivity’s upper bound proposed in this paper is considerably tight when the number of trucks becomes large and it can be quickly obtained, especially if the proposed greedy search is used. This makes it suitable for the long-term planning of a mine (e.g., truck and shovel allocation problem). On the other hand, if the simulation is slower, it provides a physical realization of the mine operation. Furthermore, more details can be added to the simulation, making it suitable for short-term planning (e.g., truck dispatch problem).
The simple dispatch rule proposed in this paper leads to a productivity level close the its upper bound for homogeneous fleets, which indicates the suitability of the rules. When queues in the mine are small or when there are too many trucks in the mine, the proposed dispatch rule tends to provide a productivity level close to its upper bound. Considering that the dispatch rule is greedy, the good agreement between the greedy search and the linear programming productivity upper bound supports the good performance of the dispatch rule.
The approach introduced in this paper to couple long-term and short-term policies may serve to derive new objectives other than maximization of productivity (e.g., the maximization of shovel or truck utilization or the maximization of adherence to production specifications, as proposed in other papers) and their respective dispatch rules. Furthermore, as an instance of this approach, this paper introduces a new simple-to-implement and fast-to-run upper bound and its respective dispatch rule to maximize mine production from long-term planning to short-term operation with an agreement between the long-term planning and short-term operation of as close as .


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}