
Image Assisted Total Stations for Structural Health Monitoring—A Review


Abstract
:1. Introduction
2. Materials and Methods
3. Image Assisted Total Station (IATS)
3.1. Commercially Available Systems
3.2. Research Prototypes
3.3. Automatic Detection and Matching
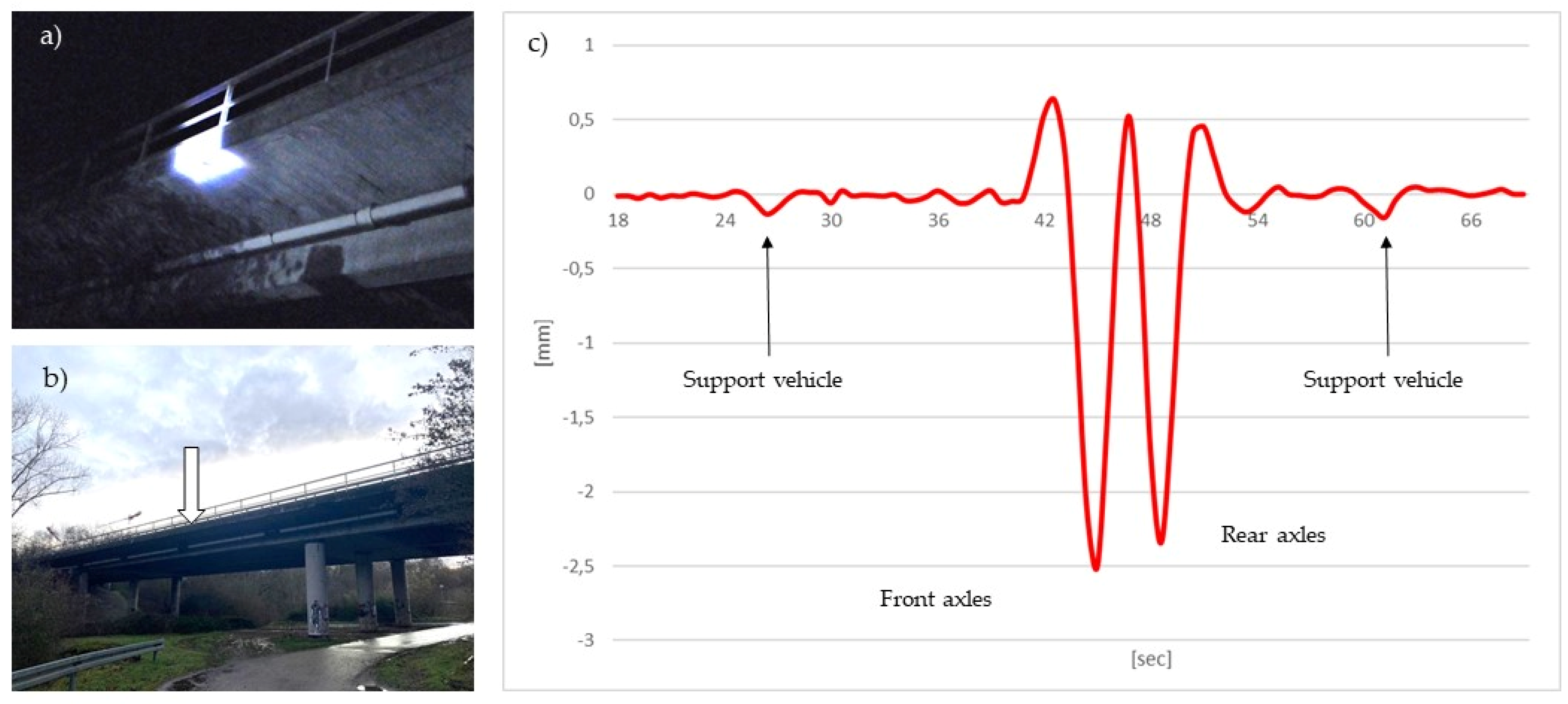
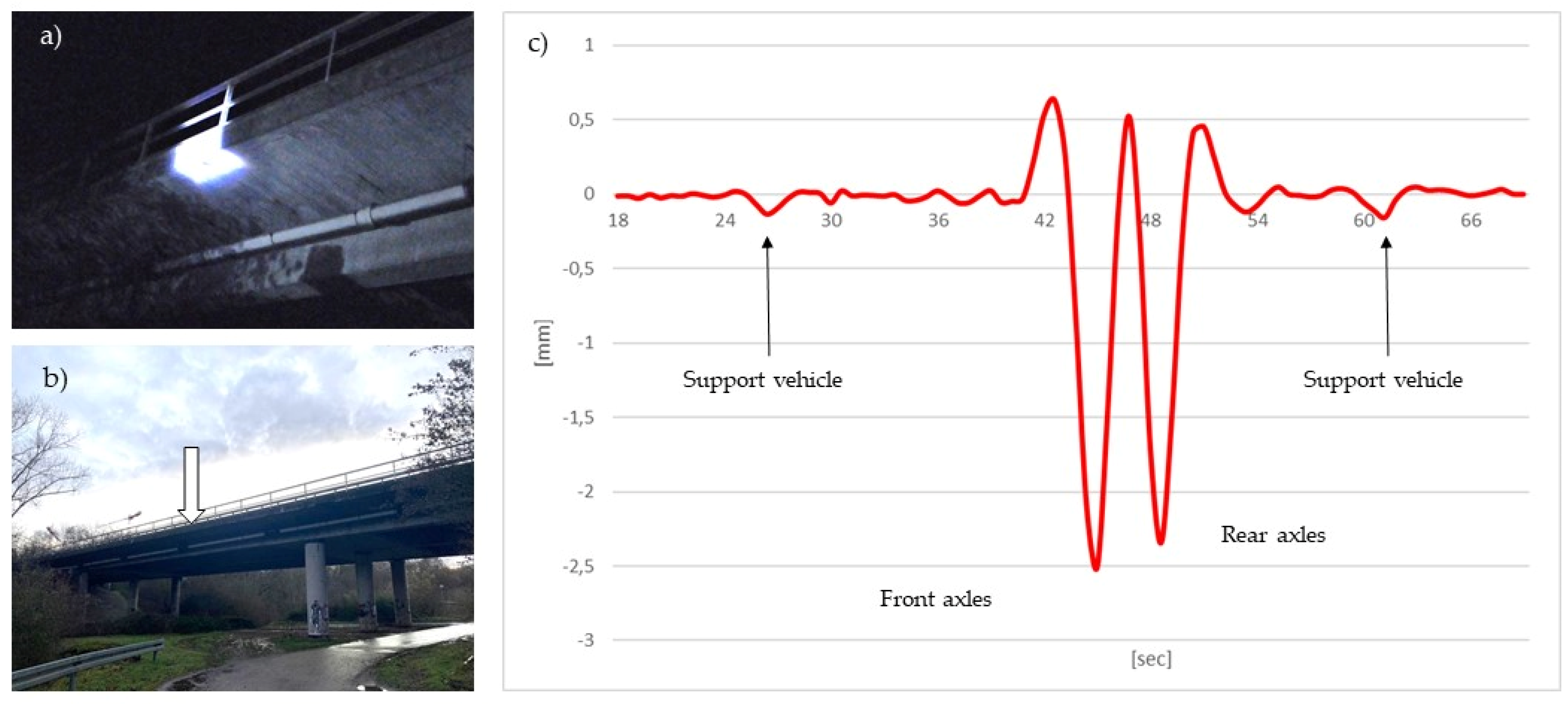
4. Structural Health Monitoring with IATS
5. Summary and Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wenzel, H.; Pichler, D. Ambient Vibration Monitoring; John Wiley & Sons Ltd.: Chichester, UK, 2005; ISBN 139780470024300. [Google Scholar]
- Wenzel, H. Health Monitoring of Bridges; Wiley: Chichester UK, 2009; ISBN 9780470031735. [Google Scholar]
- Federal Ministry of Transport and Digital Infrastructure. Bericht “Stand der Ertüchtigung von Straßenbrücken der Bundesfernstraßen”: Vorlage an den Ausschuss für Verkehr und digitale Infrastruktur des Deutschen Bundestages; Federal Ministry of Transport and Digital Infrastructure: Berlin, Germany, 2016. [Google Scholar]
- Morgese, M.; Ansari, F.; Domaneschi, M.; Cimellaro, G.P. Post-collapse analysis of Morandi’s Polcevera viaduct in Genoa Italy. J. Civ. Struct. Health Monit. 2020, 10, 69–85. [Google Scholar] [CrossRef]
- Pedestrian Bridge Collapse Over SW 8th Street: Accident Report; Highway Accident Report NTSB/HAR-19/02; National Transportation Safety Board: Washington, DC, USA, 2019.
- Sawo, F.; Kempkens, E. Model-based approaches for sensor data monitoring for smart bridges. In Proceedings of the 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Baden-Baden, Germany, 19–21 September 2016; pp. 347–352. [Google Scholar]
- Sabato, A.; Niezrecki, C.; Fortino, G. Wireless MEMS-based accelerometer sensor boards for structural vibration monitoring: A review. IEEE Sens. J. 2017, 17, 226–235. [Google Scholar] [CrossRef]
- Gentile, C.; Ruccolo, A.; Canali, F. Continuous monitoring of the Milan cathedral: Dynamic characteristics and vibration-based SHM. J. Civ. Struct. Health Monit. 2019, 9, 671–688. [Google Scholar] [CrossRef] [Green Version]
- Gnewuch, H.; Smeu, E.; Jackson, D.A.; Podoleanu, A. Long range extensometer for civil structure monitoring using fibre Bragg gratings. Meas. Sci. Technol. 2005, 16, 2005–2010. [Google Scholar] [CrossRef]
- Minehane, M.J.; O’Donovan, R.; Ruane, K.D.; O’Keeffe, B. The use of 3D laser scanning technology for bridge inspection and assessment. Struct. Health Monit. 2014, 13, 14. [Google Scholar]
- Schill, F. Überwachung von Tragwerken mit Profilscannern. Ph.D. Thesis, Technische Univerität Darmstadt, Darmstadt, Germany, 2018. [Google Scholar]
- Marendić, A.; Paar, R.; Duvnjak, I.; Buterin, A. Determination of dynamic displacements of the roof of sports hall Arena Zagreb. In Proceedings of the INGEO 2014 6th International Conference on Engineering Surveying, Prague, Czech Republic, 3–4 April 2014. [Google Scholar]
- Stempfhuber, W. Verification of the Trimble universal total station (uts) performance for kinematic applications. In Proceedings of the Conference on Optical 3-D Measurement Techniques IX, Vienna, Austria, 1–3 July 2009; Grün, A., Kahmen, H., Eds.; ETH Zurich: Zurich, Switzerland, 2009; pp. 211–221. [Google Scholar]
- Paar, R.; Roić, M.; Marendić, A.; Miletić, S. Technological development and application of photo and video theodolites. Appl. Sci. 2021, 11, 3893. [Google Scholar] [CrossRef]
- Biliszczuk, J.; Hawryszków, P.; Teichgraeber, M. SHM system and a FEM model-based force analysis assessment in stay cables. Sensors 2021, 21, 1927. [Google Scholar] [CrossRef]
- Bürki, B.; Guillaume, S.; Sorber, P.; Oesch, H. DAEDALUS: A versatile usable digital clip-on measuring system for total stations. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zürich, Switzerland, 15–17 September 2010; pp. 1–10. [Google Scholar]
- Guillaume, S.; Clerc, J.; Leyder, C.; Ray, J.; Kistler, M. Contribution of the image-assisted theodolite system QDaedalus to geodetic static and dynamic deformation monitoring. In Proceedings of the Conference and Seminar Proceedings: 3rd Joint International Symposium on Deformation Monitoring (JISDM), Vienna, Austria, 30 March–1 April 2016; International Federation of Surveyors FIG: Copenhagen, Denmark, 2016; p. 66. [Google Scholar]
- Wagner, A.; Wasmeier, P.; Reith, C.; Wunderlich, T. Bridge monitoring by means of video-tacheometer—A case study. avn-Allgemeine Vermessungs-Nachrichten 2013, 120, 283–292. [Google Scholar]
- Ehrhart, M.; Lienhart, W. Development and evaluation of a long range image-based monitoring system for civil engineering structures. In Proceedings of the SPIE 9437, Structural Health Monitoring and Inspection of Advanced Materials, Aerospace, and Civil Infrastructure 2015, Bellingham, WA, USA, 1 April 2015. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 10, 89. [Google Scholar]
- Page, M.J.; Moher, D.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. PRISMA 2020 explanation and elaboration: Updated guidance and exemplars for reporting systematic reviews. BMJ 2021, 372, n160. [Google Scholar] [CrossRef]
- Luhmann, T.; Robson, S.; Kyle, S.; Boehm, J. Close-Range Photogrammetry and 3D Imaging; De Gruyter: Berlin, Germany, 2020. [Google Scholar]
- Förstner, W.; Wrobel, B.P. Photogrammetric Computer Vision: Statistics, Geometry, Orientation and Reconstruction; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Topcon Corporation. GTL-1000 English Brochure: Datasheet. 2020. Available online: https://www.topcon.co.jp/en/positioning/products/pdf/GTL-1000_E.pdf (accessed on 8 June 2021).
- Leica Geosystems AG. Leica Nova TS60: Data Sheet. 2020. Available online: https://leica-geosystems.com/de-de/products/total-stations/robotic-total-stations/leica-nova-ts60 (accessed on 4 March 2021).
- Trimble Inc. Trimble S9/S9HP Total Station: Datasheet. Available online: https://geospatial.trimble.com/products-and-solutions/trimble-s9-hp (accessed on 16 August 2021).
- Trimble Inc. Trimble SX12: Datasheet. Available online: https://geospatial.trimble.com/SX12 (accessed on 26 August 2021).
- Wagner, A. New Geodetic Monitoring Approaches using Image Assisted Total Stations. Ph.D. Thesis, Technische Universität München, München, Germany, 2017. [Google Scholar]
- Wagner, A.; Wiedemann, W.; Wasmeier, P.; Wunderlich, T. Monitoring concepts using image assisted total stations. In Proceedings of the SIG 2016—International Symposium on Engineering Geodesy, Varaždin, Croatia, 20–22 May 2016; Paar, R., Marendić, A., Zrinjski, M., Eds.; SIG 2016. Croatian Geodetic Society: Zagreb, Croatia, 2016. ISBN 953590180X/9789535901808. [Google Scholar]
- Guillaume, S.; Bürki, B.; Griffet, S.; Mainaud Durand, H. QDaedalus: Augmentation of total stations by CCD sensor for automated contactless high-precision metrology. In Proceedings of the FIG Working Week 2012, Rome, Italy, 6–10 May 2012. [Google Scholar]
- Charalampous, E.; Psimoulis, P.; Guillaume, S.; Spiridonakos, M.; Klis, R.; Bürki, B.; Rothacher, M.; Chatzi, E.; Luchsinger, R.; Feltrin, G. Measuring sub-mm structural displacements using QDaedalus: A digital clip-on measuring system developed for total stations. Appl. Geomat. 2014, 7, 91–101. [Google Scholar] [CrossRef] [Green Version]
- Schlüter, M.; Hauth, S.; Heß, H. Selbstkalibrierung motorisierter Digitalkameratheodolite für technische Präzisionsmessungen. In zfv—Zeitschrift für Geodäsie, Geoinformation und Landmanagement; DVW e.V.—Gesellschaft für Geodäsie, Geoinformation und Landmanagement, Ed.; Wißner-Verlag: Augsburg, Germany, 2009; pp. 22–28. [Google Scholar]
- Hauth, S.; Schlüter, M.; Thiery, F. Schneller und ausdauernder als das menschliche Auge: Modulare Okularkameras am Motortachymeter. avn. Allgemeine Vermessungs Nachrichten 2013, 120, 210–216. [Google Scholar]
- Atorf, P.; Heidelberg, A.; Schlüter, M.; Zschiesche, K. Berührungslose Positionsbestimmung von spiegelnden Kugeln mit Methoden des maschinellen Sehens. Zfv—Z. Für Geodäsie Geoinf. und Landmanagement 2019, 144, 317–322. [Google Scholar] [CrossRef]
- Paar, R.; Marendić, A.; Wagner, A.; Wiedemann, W. Using IATS and digital levelling staffs for the determination of dynamic displacements and natural oscillation frequencies of civil engineering structures. In Proceedings of the INGEO 2017—7th International Conference on Engineering Surveying, Lisbon, Portugal, 18–20 October 2017. [Google Scholar]
- Walser, B.H. Development and calibration of an image assisted total station. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2004. [Google Scholar]
- Wasmeier, P. Grundlagen der Deformationsbestimmung mit Messdaten bildgebender Tachymeter. Ph.D. Thesis, Technische Universität München, München, Germany, 2009. [Google Scholar]
- Wasmeier, P. Videotachymetrie—Sensorfusion mit Potenzial. avn. Allgemeine Vermessungs Nachrichten 2009, 116, 261–267. [Google Scholar]
- Reiterer, A.; Wagner, A. System considerations of an image assisted total station—Evaluation and assessment. avn. Allgemeine Vermessungs Nachrichten 2012, 119, 83–94. [Google Scholar]
- Wagner, A.; Huber, B.; Wiedemann, W.; Paar, G. Long-range geo-monitoring using image assisted total stations. J. Appl. Geod. 2014, 8, 223–234. [Google Scholar] [CrossRef]
- Heppe, M. Erweiterung der Multistation Leica MS50 zum Modularen Digitalkameratachymeter. Bachelor’s Thesis, University of Applied Sciences Mainz, Mainz, Germany, 2015, unpublished. [Google Scholar]
- Rottensteiner, F. Semi-Automatic Extraction of Buildings Based on Hybrid Adjustment Using 3D Surface Models and Management of Building Data in a TIS. Ph.D. Thesis, University of Technology, Wien, Austria, 2001. [Google Scholar]
- Reiterer, A.; Huber, N.B.; Bauer, A. Image-based detection and matching of homologue points using feature-vectors–functionality and evaluation in a deformation measurement system. Int. Arch. Photogramm. 2010, 38, 510–515. [Google Scholar]
- Wagner, A.; Wasmeier, P. Flächen-und Feature-basiertes Monitoring mit Videotachymetern. In Multi-Sensor-Systeme–Bewegte Zukunftsfelder; DVW—Gesellschaft für Geodäsie, Geoinformation und Landmanagement e.V., Ed.; Wißner-Verlag: Hamburg, Germany, 2014; pp. 75–88. ISBN 3896399950. [Google Scholar]
- Weinhuber, A.; Wiedemann, W.; Wasmeier, P.; Wunderlich, T. No second chance–monitoring destructive bridge load tests. In Contributions to International Conferences on Engineering Surveying. In Proceedings of the 8th INGEO International Conference on Engineering Surveying and 4th SIG Symposium on Engineering Geodesy, Conference online, 22–23 October 2020; Kopáčik, A., Kyrinovič, P., Erdélyi, J., Paar, R., Marendić, A., Eds.; INGEO&SIG 2020. Springer: Berlin/Heidelberg, Germany, 2020; pp. 29–38. [Google Scholar]
- Reiterer, A.; Wasmeier, P. Anwendungsfelder bildgebender Tachymetrie—Herausforderungen und Perspektiven. In Terrestrisches Laserscanning—TLS 2011 mit TLS-Challenge: Beiträge zum 106. DVW-Seminar am 1. und 2. Dezember 2011 in Fulda, 1st ed.; Wunderlich, T., Ohlmann-Lauber, J., Eds.; Wißner-Verlag: Augsburg, Germany, 2011; pp. 189–202. ISBN 9783896398383. [Google Scholar]
- Ehrhart, M.; Lienhart, W. Image-based dynamic deformation monitoring of civil engineering structures from long ranges. In Image Processing: Machine Vision Applications VIII; Lam, E.Y., Niel, K.S., Eds.; SPIE: Bellingham, WA, USA, 2015; pp. 139–152. [Google Scholar]
- Ehrhart, M.; Lienhart, W. Monitoring of civil engineering structures using a state-of-the-art image assisted total station. J. Appl. Geod. 2015, 9, 174–182. [Google Scholar] [CrossRef]
- Lienhart, W.; Ehrhart, M. Statische und dynamische Überwachung von Infrastrukturbauten mit kommerziellen Videotachymetern. In Proceedings of the 20. Internationale Geodätische Woche Obergurgl 2019, Obergurgl, Austria, 10–16 February 2019; Hanke, K., Weinold, T., Eds.; Wichmann VDE Verlag GmbH: Berlin, Germany, 2019; pp. 145–156. [Google Scholar]
- Ulrich, M.; Follmann, P.; Neudeck, J.-H. A comparison of shape-based matching with deep-learning-based object detection. Tm Technisches Messen 2019, 86, 685–698. [Google Scholar] [CrossRef]
- Ma, J.; Jiang, X.; Fan, A.; Jiang, J.; Yan, J. Image matching from handcrafted to deep features: A survey. Int. J. Comput Vis. 2021, 129, 23–79. [Google Scholar] [CrossRef]
- Reiterer, A. A Knowledge-Based Decision System for an On-Line Video-Theodolite-Based Multisensor System. Ph.D. Thesis, Technische Universität Wien, Wien, Austria, 2004. [Google Scholar]
- Grimm, D.; Kleemaier, G.; Zogg, H.-M. ATRplus White Paper. 2015. Available online: https://leica-geosystems.com/-/media/files/leicageosystems/products/white-papers/atrplus_wp.ashx?la=en&hash=91E09F6A1CF79DE10D9B742391F7B35F (accessed on 10 October 2021).
- X-Pointing Technology White Paper; Topcon Corporation: Livermore, CA, USA, 2013.
- Wagner, A. A new approach for geo-monitoring using modern total stations and RGB + D images. Measurement 2016, 82, 64–74. [Google Scholar] [CrossRef] [Green Version]
- Marendić, A.; Paar, R.; Damjanovic, D. Measurement of bridge dynamic displacements and natural frequencies by RTS. JCE 2017, 69, 281–294. [Google Scholar] [CrossRef]
- Neitzel, F.; Schwarz, W. Schwingungsuntersuchungen. In Ingenieurgeodäsie: Handbuch der Geodäsie, Herausgegeben von Willi Freeden und Reiner Rummel; Schwarz, W., Ed.; Springer: Berlin/Heidelberg, Germany, 2017; pp. 463–506. ISBN 9783662471883. [Google Scholar]
- Omidalizarandi, M.; Kargoll, B.; Paffenholz, J.-A.; Neumann, I. Accurate vision-based displacement and vibration analysis of bridge structures by means of an image-assisted total station. Adv. Mech. Eng. 2018, 10, 1–19. [Google Scholar] [CrossRef]
- Ehrhart, M.; Kalenjuk, S.; Lienhart, W. Monitoring of bridge vibrations with image-assisted total stations. In Proceedings of the SMAR 2017—Fourth Conference on Smart Monitoring, Assessment and Rehabilitation of Civil Structures, Zürich, Switzerland, 13–15 September 2017; ISBN 9783905594669. [Google Scholar]
- Lienhart, W.; Ehrhart, M.; Grick, M. High frequent total station measurements for the monitoring of bridge vibrations. J. Appl. Geod. 2017, 11, 1–8. [Google Scholar] [CrossRef]
- Leica Geosystems AG. Leica Nova MS50: Data Sheet. Available online: https://w3.leica-geosystems.com/downloads123/zz/tps/nova_ms50/brochures-datasheet/Leica_Nova_MS50_DAT_en.pdf (accessed on 17 June 2021).
- Omidalizarandi, M.; Neumann, I.; Kemkes, E.; Kargoll, B.; Diener, D.; Rüffer, J.; Paffenholz, J.-A. Mems based bridge monitoring supported by image-assisted total station. In Proceedings of the Joint Conferences of 5th Sensors and Models in Photogrammetry and Remote Sensing (SMPR) and 3rd Geospatial Information Research (GI Research), GeoSpatial Conference 2019, Karaj, Iran, 12–14 October 2019; pp. 833–842. [Google Scholar]
- Leica Nova MS60: Data sheet; Leica Geosystems AG: Heerbrugg, Switzerland, 2020; Available online: https://leica-geosystems.com/-/media/files/leicageosystms/products/datasheets/leica_nova_ms60_ds.ashx?la=engb&hash=DC24A3605EE8B0DED66F30240A8B63DC (accessed on 16 August 2021).
- Wiedemann, W.; Wagner, A.; Wasmeier, P.; Wunderlich, T. Monitoring mit scannenden bildgebenden Tachymetern. In Terrestrisches Laserscanning 2017(TLS 2017); DVW—Gesellschaft für Geodäsie, Geoinformation und Landmanagement e.V., Ed.; Wißner-Verlag: Augsburg, Germany, 2017; pp. 31–44. ISBN 9783957861450. [Google Scholar]
- Reiterer, A.; Lehmann, M. An image-based measurement system for quality control in civil engineering. In Proceedings of the 2007 5th International Symposium on Image and Signal Processing and Analysis, Istanbul, Turkey, 27–29 September 2007; pp. 113–118. [Google Scholar]
- Reiterer, A. Object monitoring/reconstruction with automated image-based measurement systems. In Proceedings of the 3rd IAG Symposium on Geodesy for Geotechnical and Structural Engineering and 12th FIG Symposium on Deformation Measurements, Baden, Austria, 22–24 May 2006. [Google Scholar]
- Reiterer, A.; Lehmann, M.; Miljanovic, M.; Ali, H.; Paar, G.; Egly, U.; Eiter, T.; Kahmen, H. A 3D optical deformation measurement system supported by knowledge-based and learning techniques. J. Appl. Geod. 2009, 3, 1–13. [Google Scholar] [CrossRef]
- Zschiesche, K.; Rau, L.; Schlüter, M. Optische Schwingungsmessungen: Status, Integration, Pros und Contras. In Proceedings of the GeoMonitoring, Braunschweig, Germany, 12–13 March 2020; pp. 49–63. [Google Scholar]
- Staiger, L.; Werner, Y.; Ziegler, S. Structural Health Monitoring mit Modularem Digitalkameratachymeter. Master’s Thesis, University of Applied Sciences Mainz, Mainz, Germany, 2021, unpublished. [Google Scholar]


{kind=link}
{kind=link}
| DAEDALUS ETH Zurich [16] | MoDiTa i3mainz—Mainz University of Applied Sciences [41] | University of Zagreb [14] | IATS2 Technical University of Munich [38] | |
|---|---|---|---|---|
| Tacheometer/ total station |  |  |  |  |
| TCA 1800, TCA 2003 and TDA 5005 2 | MS 50 2 | TPS1201 | based on the TCRA1200 series | |
| camera | Guppy F–080C | UI–3250 ML 1 | GoPro Hero 5 | fixed camera from manufacturer |
| resolution [pixel] | 1024 × 768 | 1600 × 1200 | up to 3840 × 2160 3 | 2560 × 1920 |
| pixel size [μm] | 4.65 | 4.5 | 1.5 4 | 2.2 |
| mgon/pixel | 1.1 | 0.4–1.0 5 | – | 0.61 |
| frame rate | 30 Hz/60 Hz (full frame/ reduced FoV) | 60 Hz/2500 Hz (full frame/ reduced FoV) | 30–240 Hz | 5–200 Hz |
| sensor | CCD | CMOS | CMOS | CMOS |
| Matching Method | Undisturbed Target Position | Example 1 | Example 2 |
|---|---|---|---|
| Correlation based | 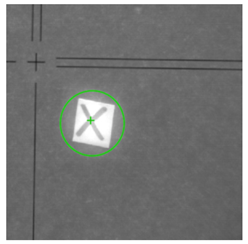 |  | 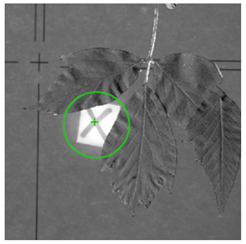 |
| Deviation from the target position compared to the undisturbed target point: | ∆y = −2.91 px ∆x = 1.27 px | ∆y = −1.22 px ∆x = 1.74 px | |
| Shape based | 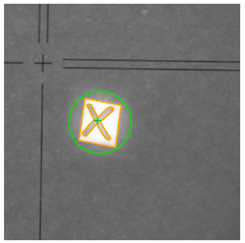 |  | 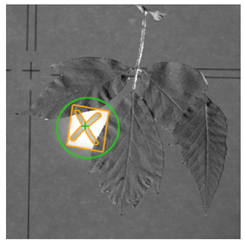 |
| Deviation from the target position compared to the undisturbed target point: | ∆y = 0.14 px ∆x = 0.02 px | ∆y = 0.24 px ∆x = 0.02 px | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zschiesche, K. Image Assisted Total Stations for Structural Health Monitoring—A Review. Geomatics 2022, 2, 1-16. https://doi.org/10.3390/geomatics2010001
Zschiesche K. Image Assisted Total Stations for Structural Health Monitoring—A Review. Geomatics. 2022; 2(1):1-16. https://doi.org/10.3390/geomatics2010001
Chicago/Turabian StyleZschiesche, Kira. 2022. "Image Assisted Total Stations for Structural Health Monitoring—A Review" Geomatics 2, no. 1: 1-16. https://doi.org/10.3390/geomatics2010001
APA StyleZschiesche, K. (2022). Image Assisted Total Stations for Structural Health Monitoring—A Review. Geomatics, 2(1), 1-16. https://doi.org/10.3390/geomatics2010001