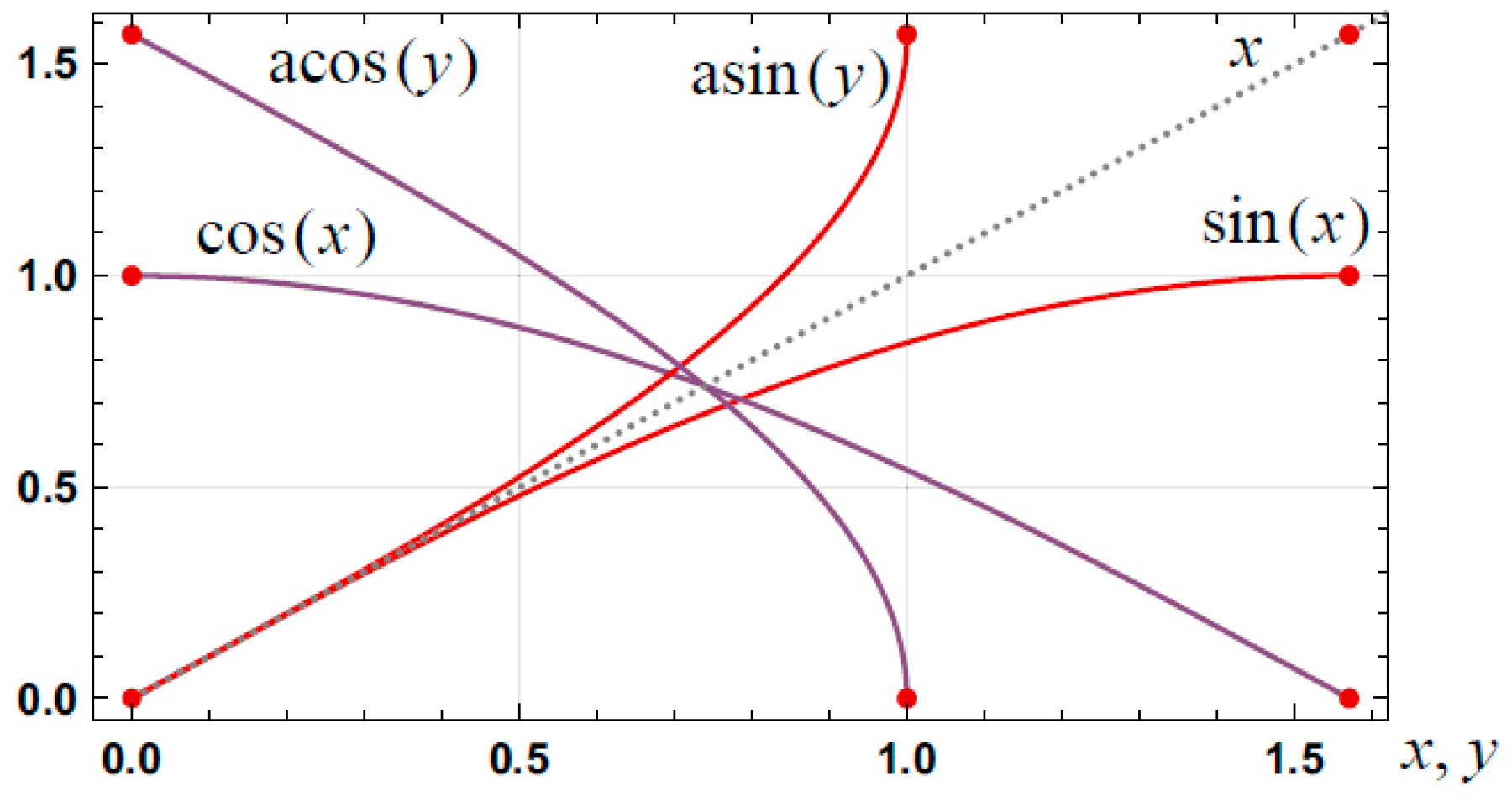
Figure 1.
Graph of , , and for . Arcsine and arccosine are, respectively, written as asin and acos.
Figure 1.
Graph of , , and for . Arcsine and arccosine are, respectively, written as asin and acos.
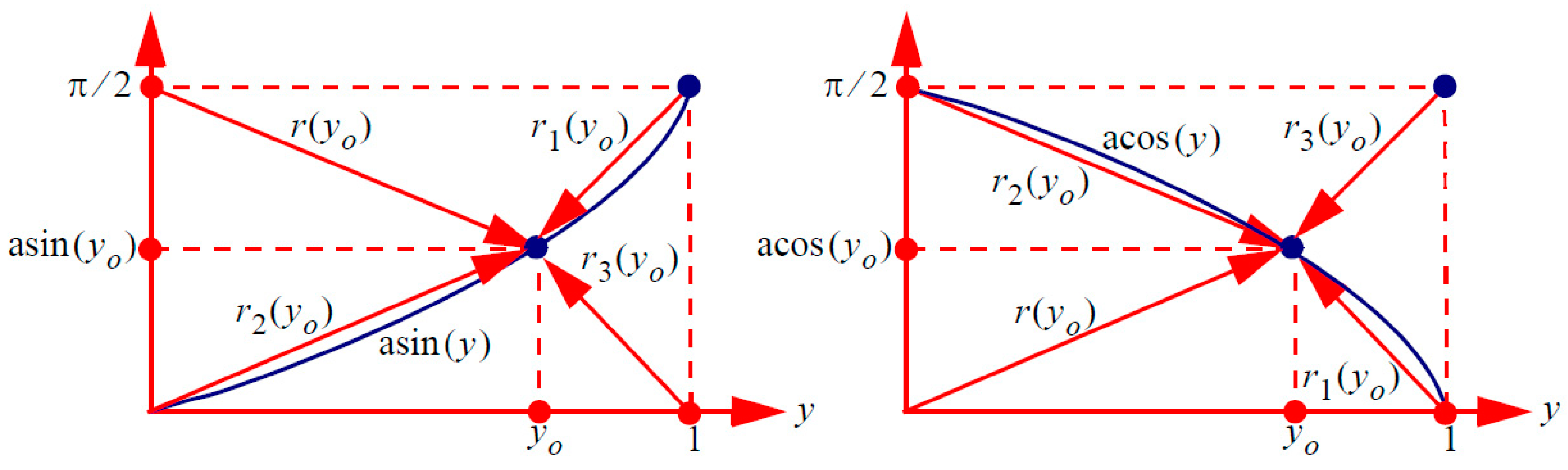
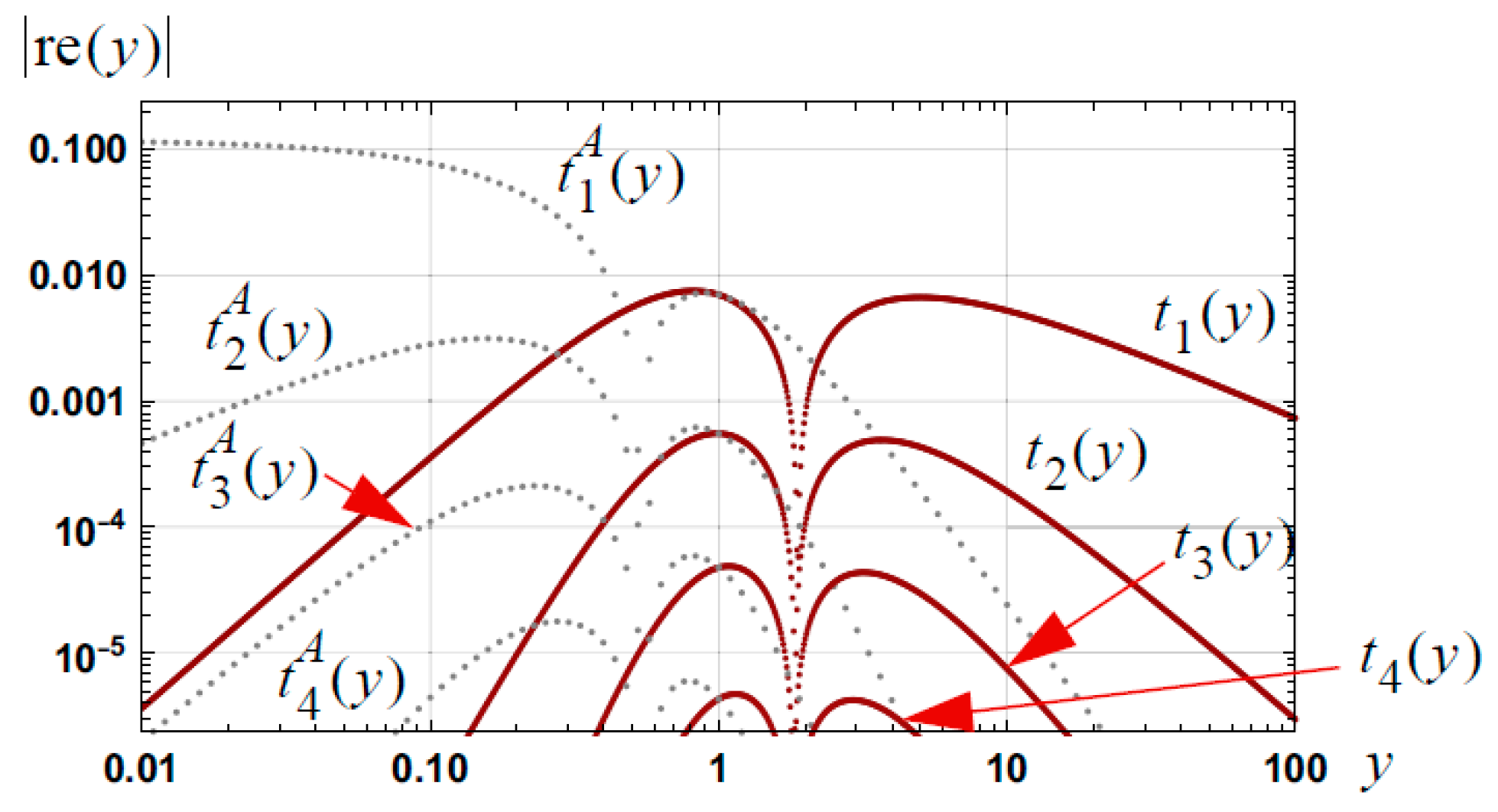
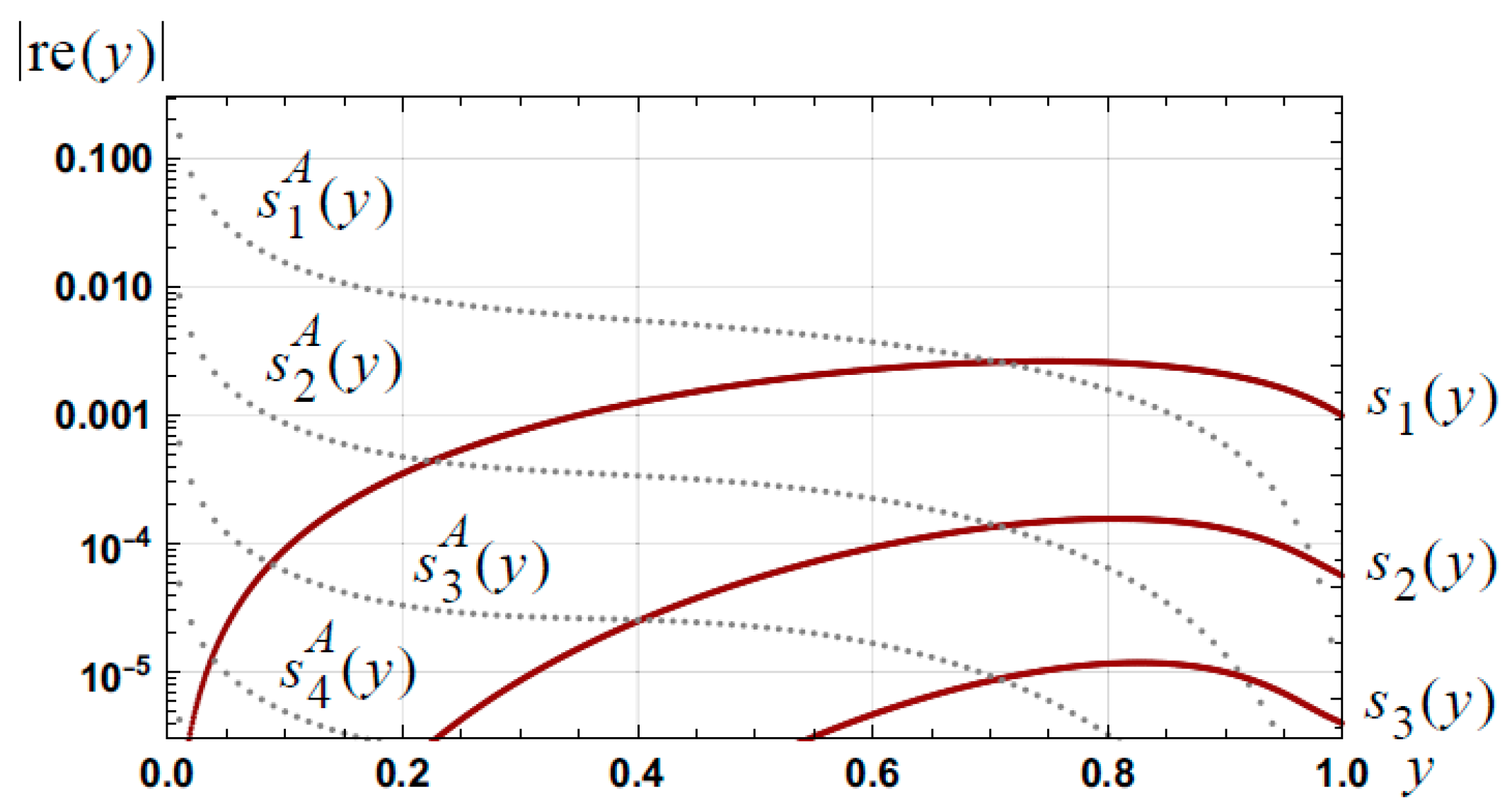
Figure 3.
Illustration of four radial functions associated with arcsine and arccosine.
Figure 3.
Illustration of four radial functions associated with arcsine and arccosine.
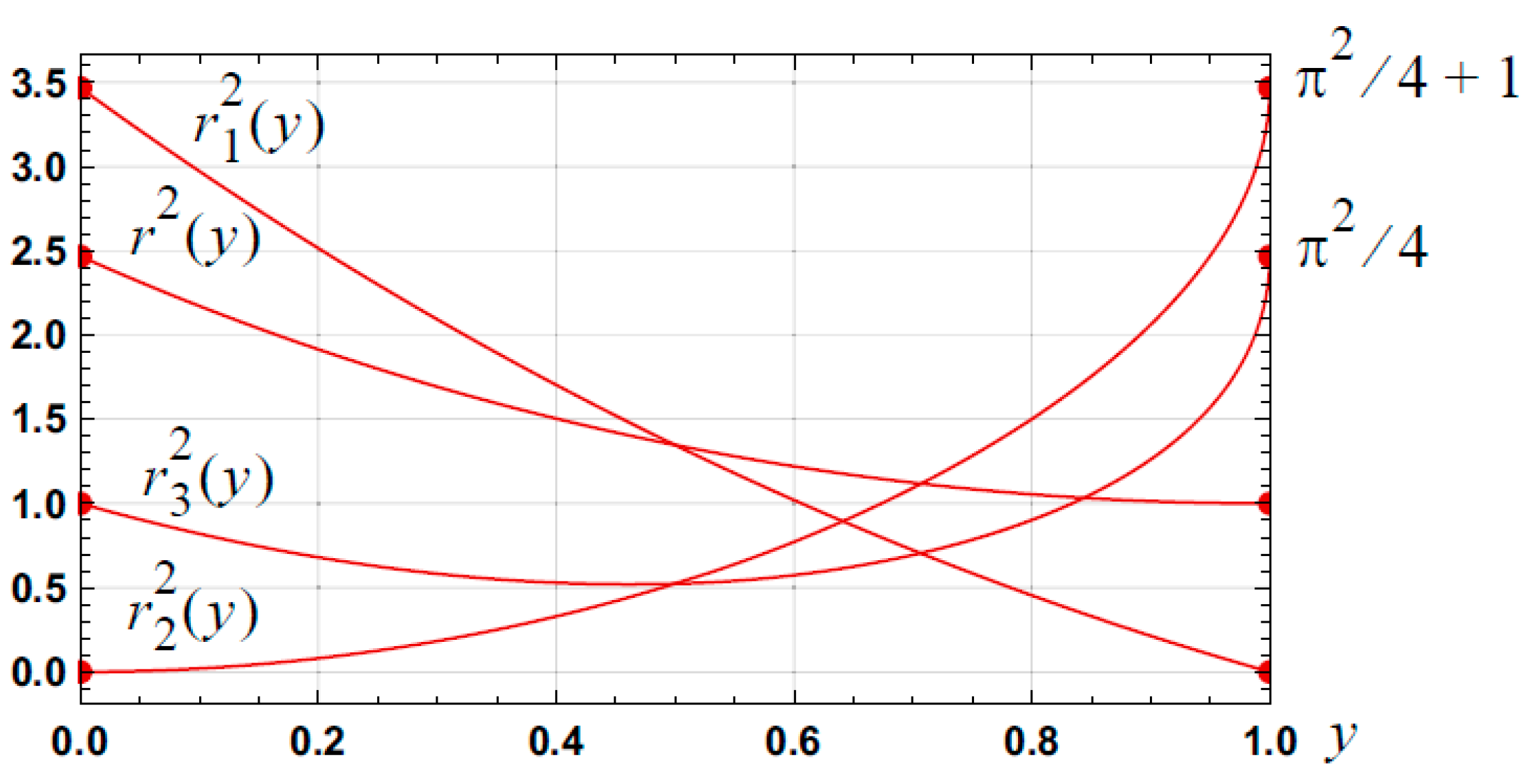
Figure 4.
Graph of .
Figure 4.
Graph of .
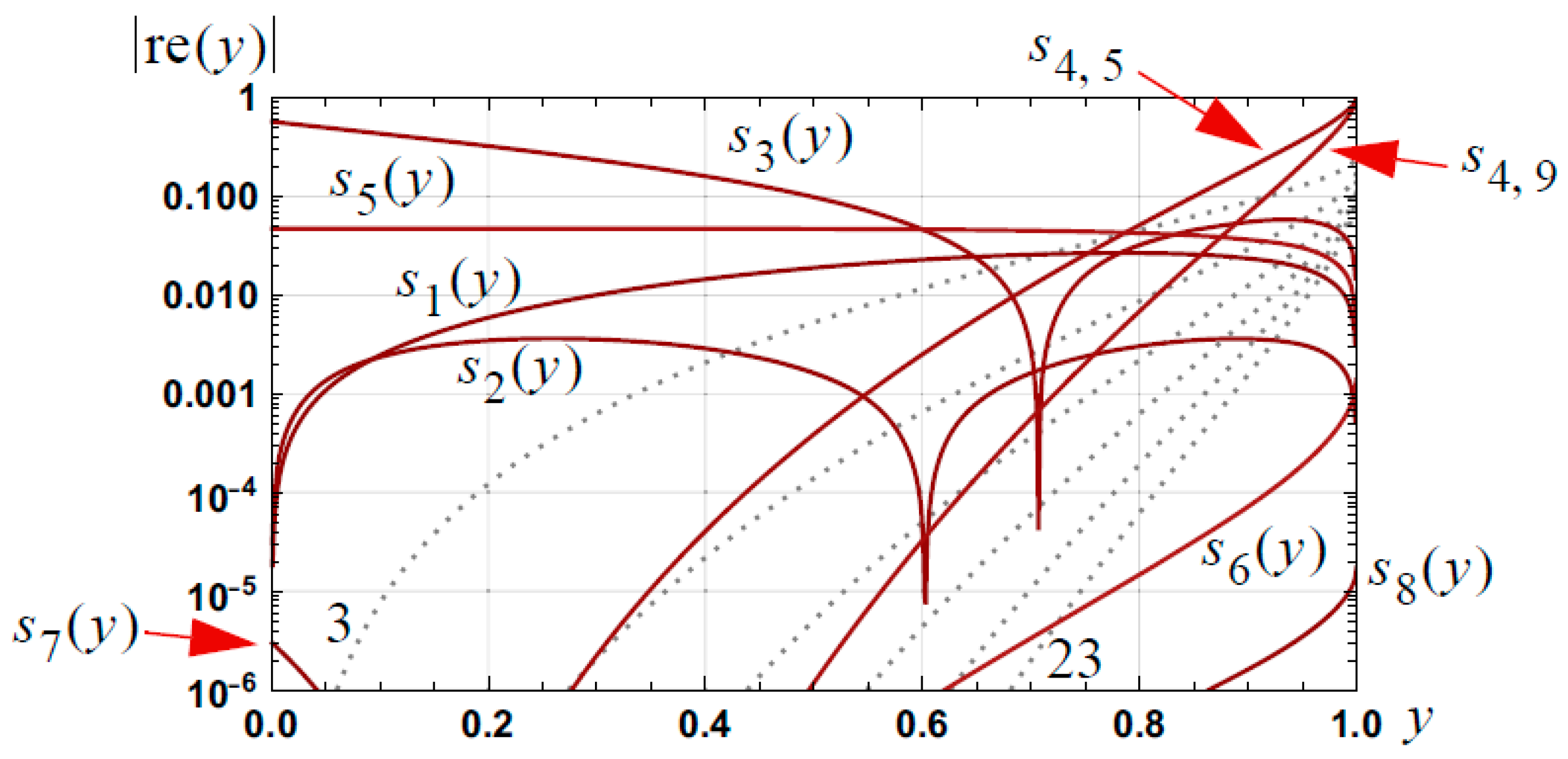
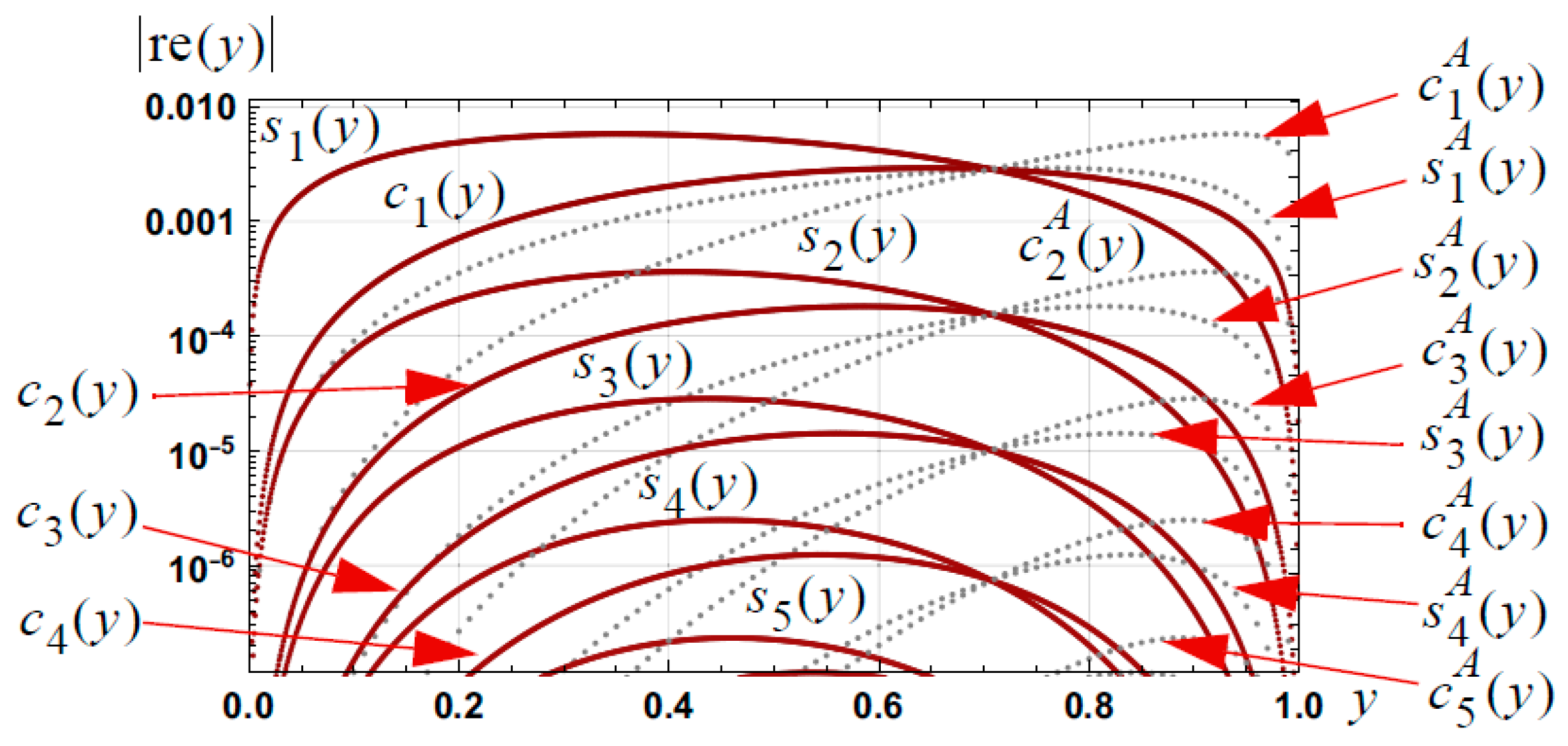
Figure 5.
Graph of the relative error in approximations, of orders 1 to 5, for arcsine and arccosine. The dotted curves are for the approximations and .
Figure 5.
Graph of the relative error in approximations, of orders 1 to 5, for arcsine and arccosine. The dotted curves are for the approximations and .
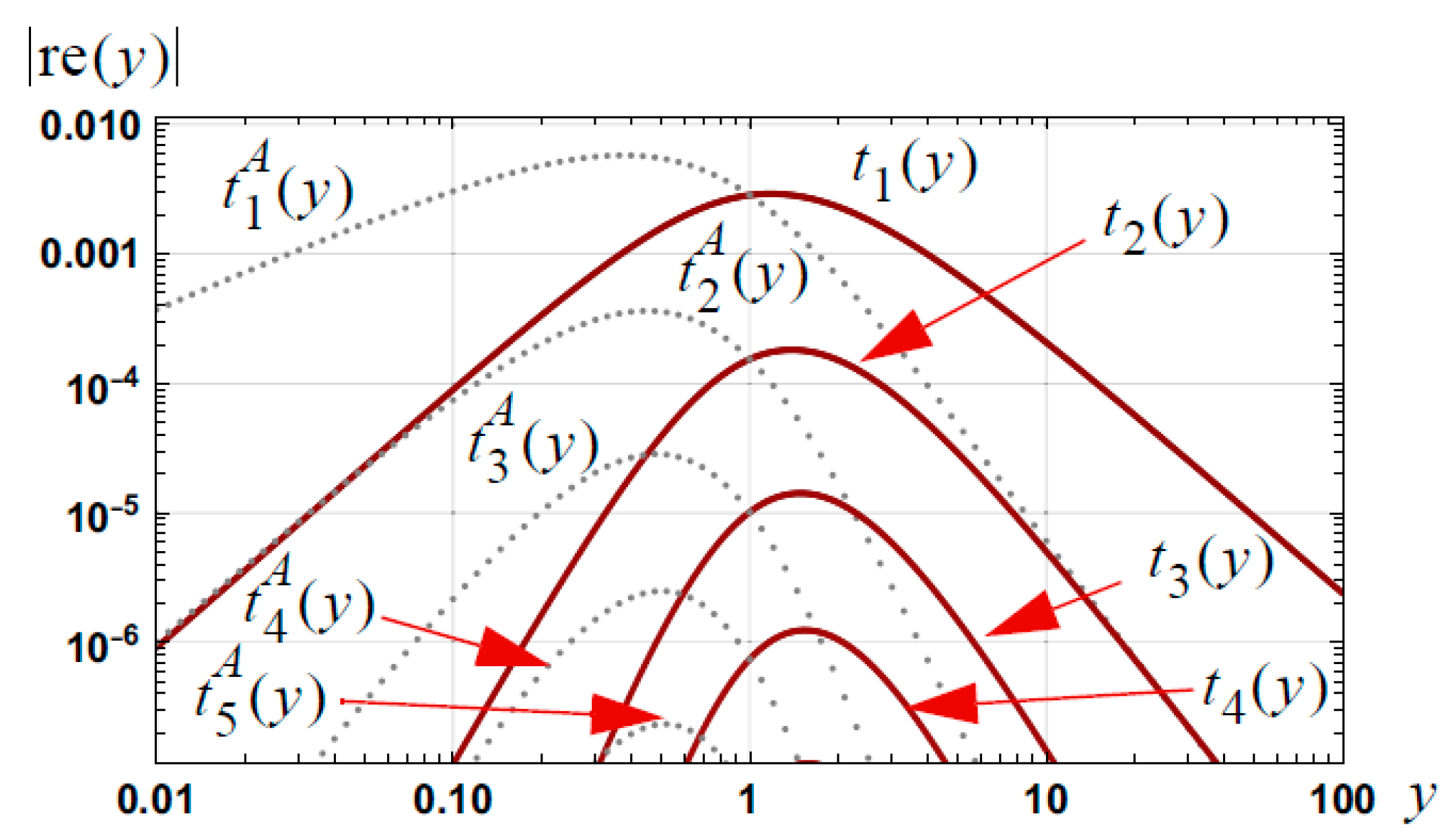
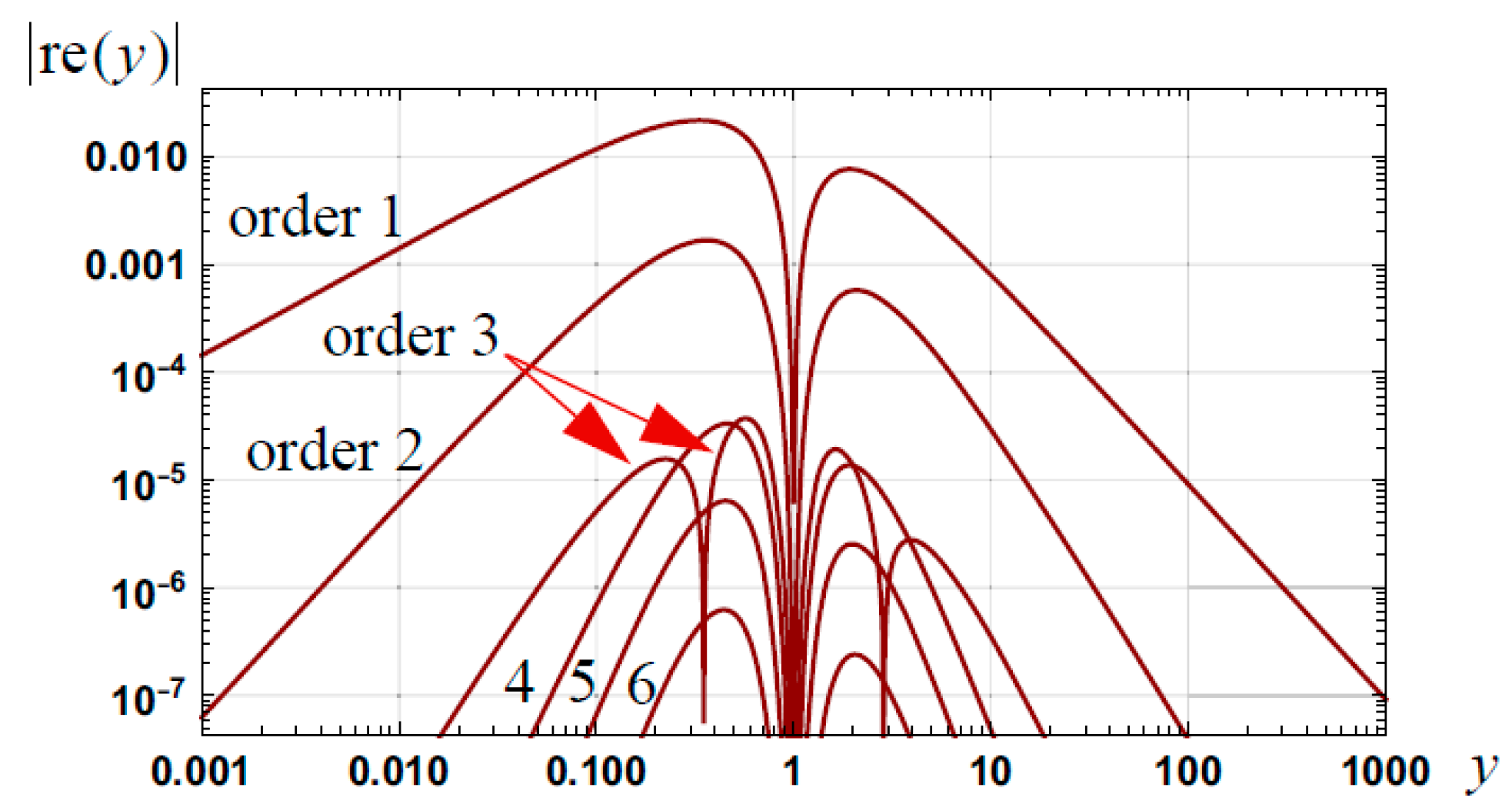
Figure 6.
Graph of the relative error in approximations, of orders 1 to 5, for arctangent.
Figure 6.
Graph of the relative error in approximations, of orders 1 to 5, for arctangent.
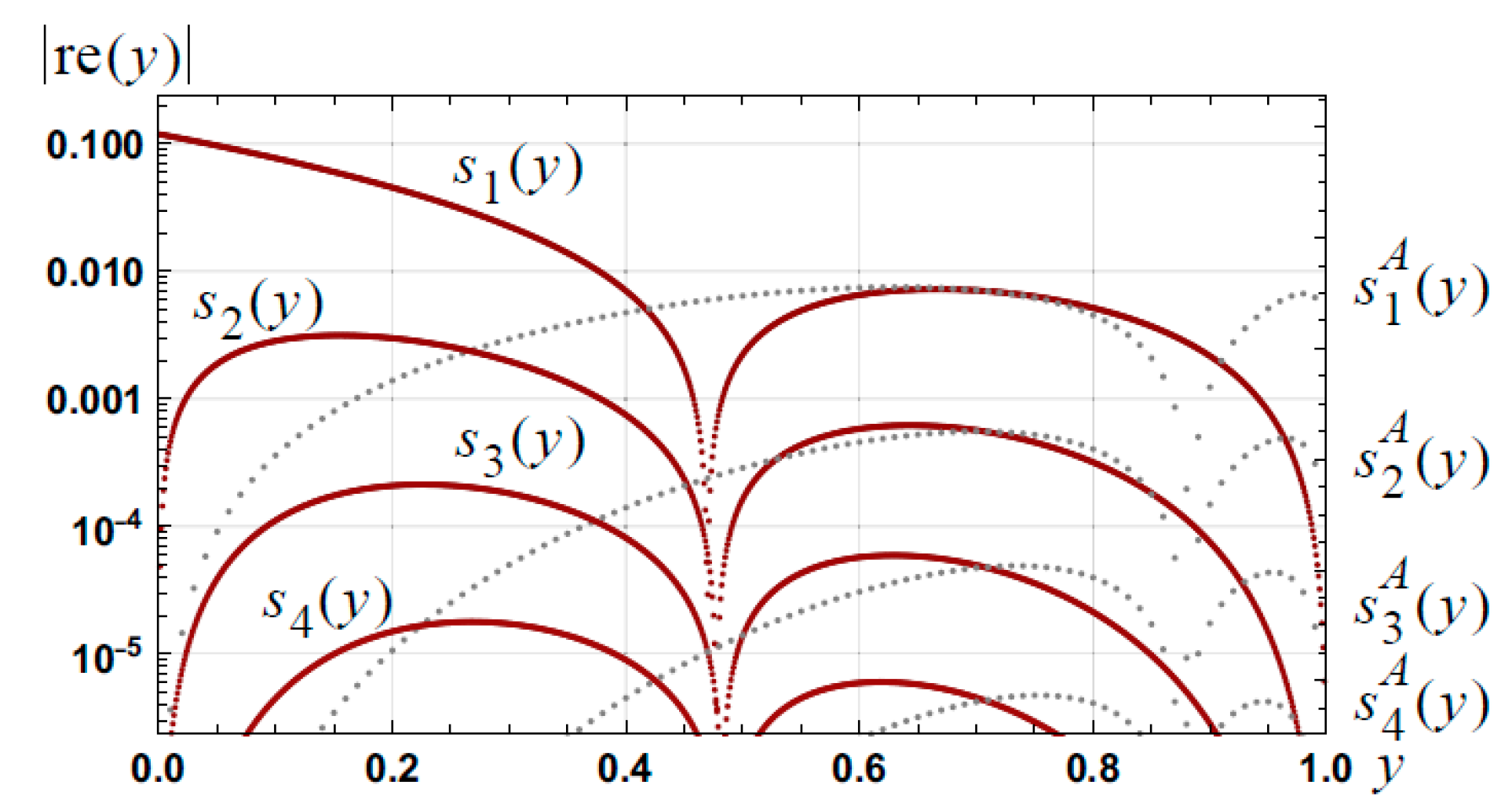
Figure 7.
Graph of the relative errors in the approximations, as defined in Theorem 2, to arcsine.
Figure 7.
Graph of the relative errors in the approximations, as defined in Theorem 2, to arcsine.
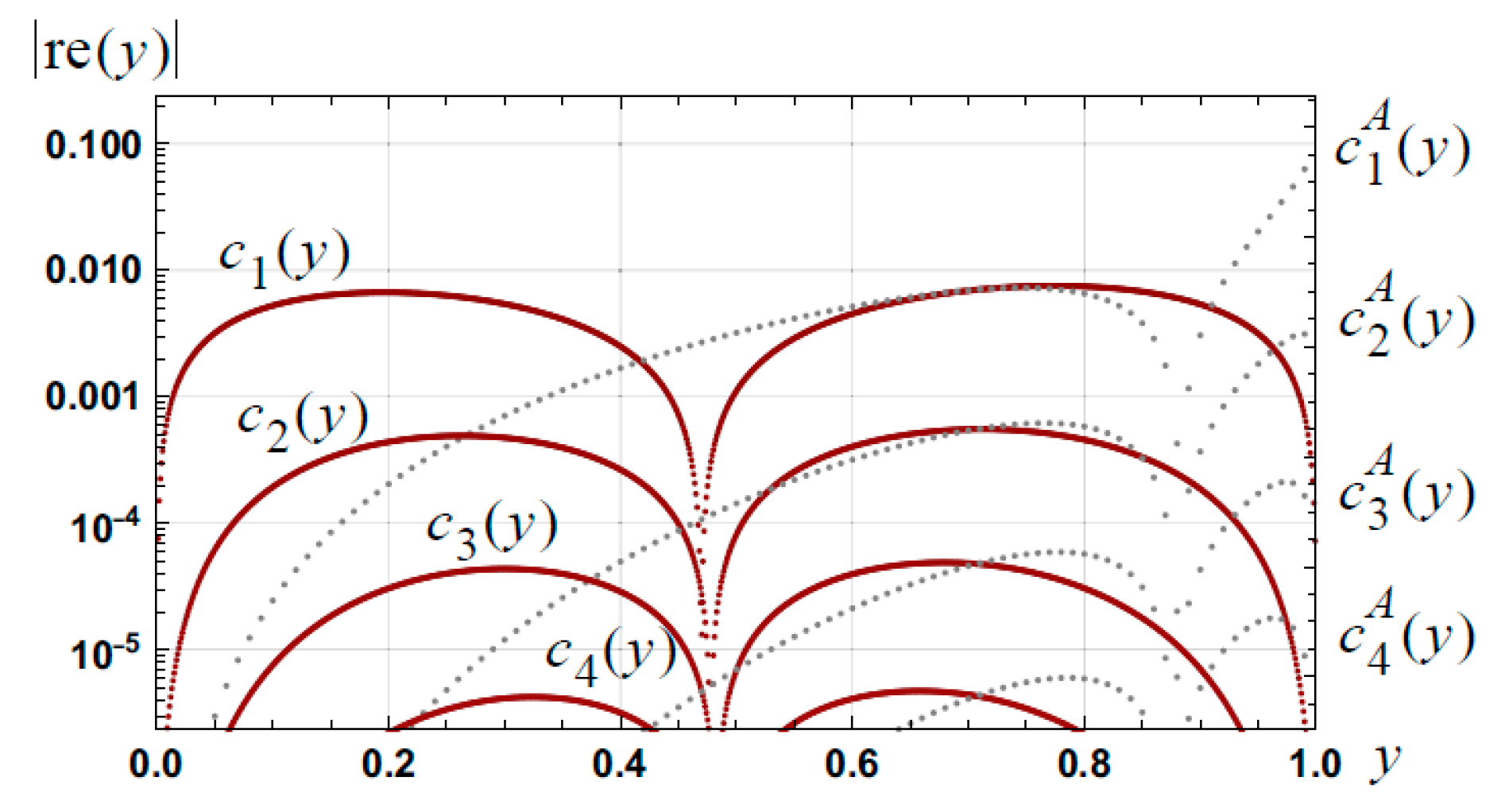
Figure 8.
Graph of the relative errors in the approximations, as defined in Theorem 2, to arccosine.
Figure 8.
Graph of the relative errors in the approximations, as defined in Theorem 2, to arccosine.
Figure 9.
Graph of the relative errors in the approximations, as defined in Theorem 2, to arctangent.
Figure 9.
Graph of the relative errors in the approximations, as defined in Theorem 2, to arctangent.
Figure 10.
Graph of the relative errors in the approximations, as defined in Theorem 3, to arc-sin.
Figure 10.
Graph of the relative errors in the approximations, as defined in Theorem 3, to arc-sin.
Figure 11.
Graph of
for the case of .
Figure 11.
Graph of
for the case of .
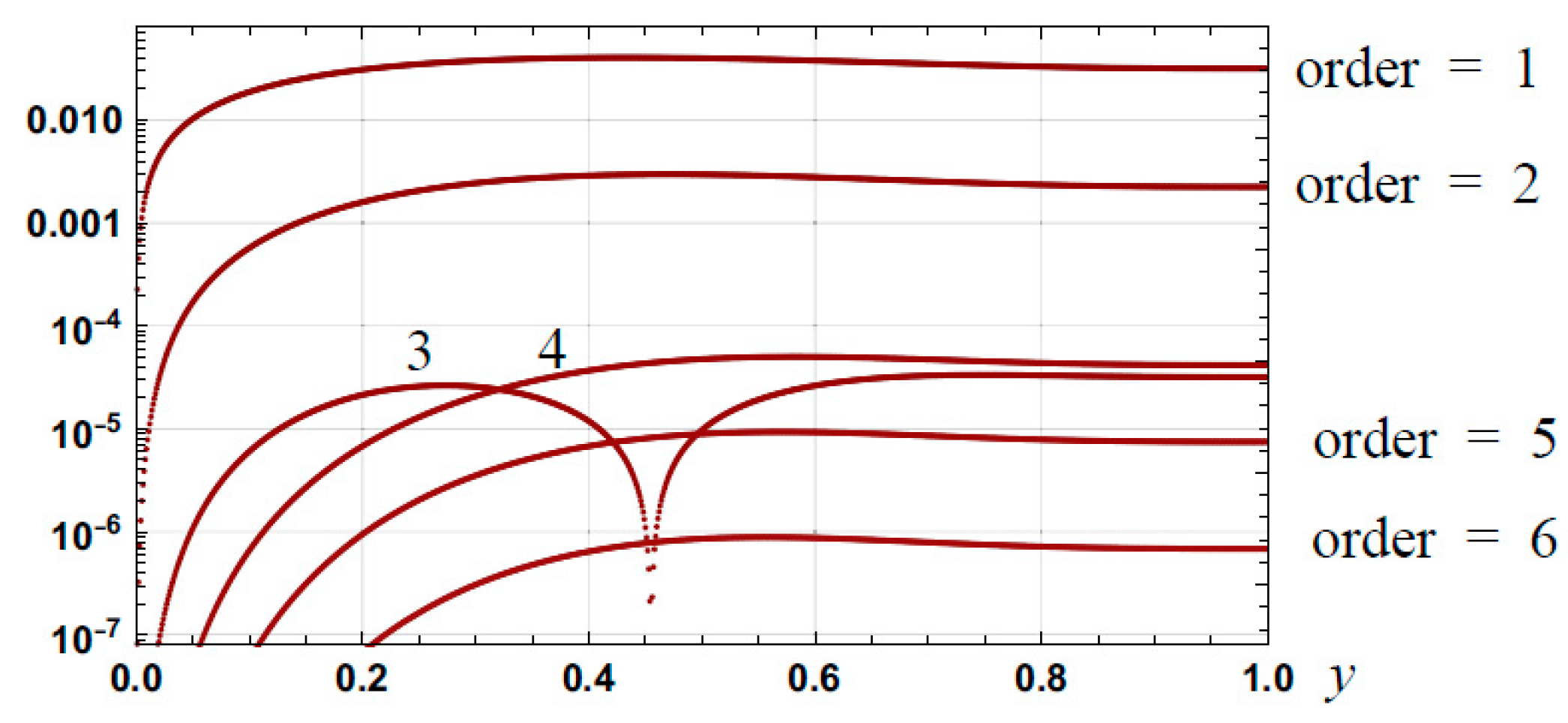
Figure 12.
Graphs of the relative errors in approximations, of orders 1 to 6, for arctangent as defined in Theorem 5.
Figure 12.
Graphs of the relative errors in approximations, of orders 1 to 6, for arctangent as defined in Theorem 5.
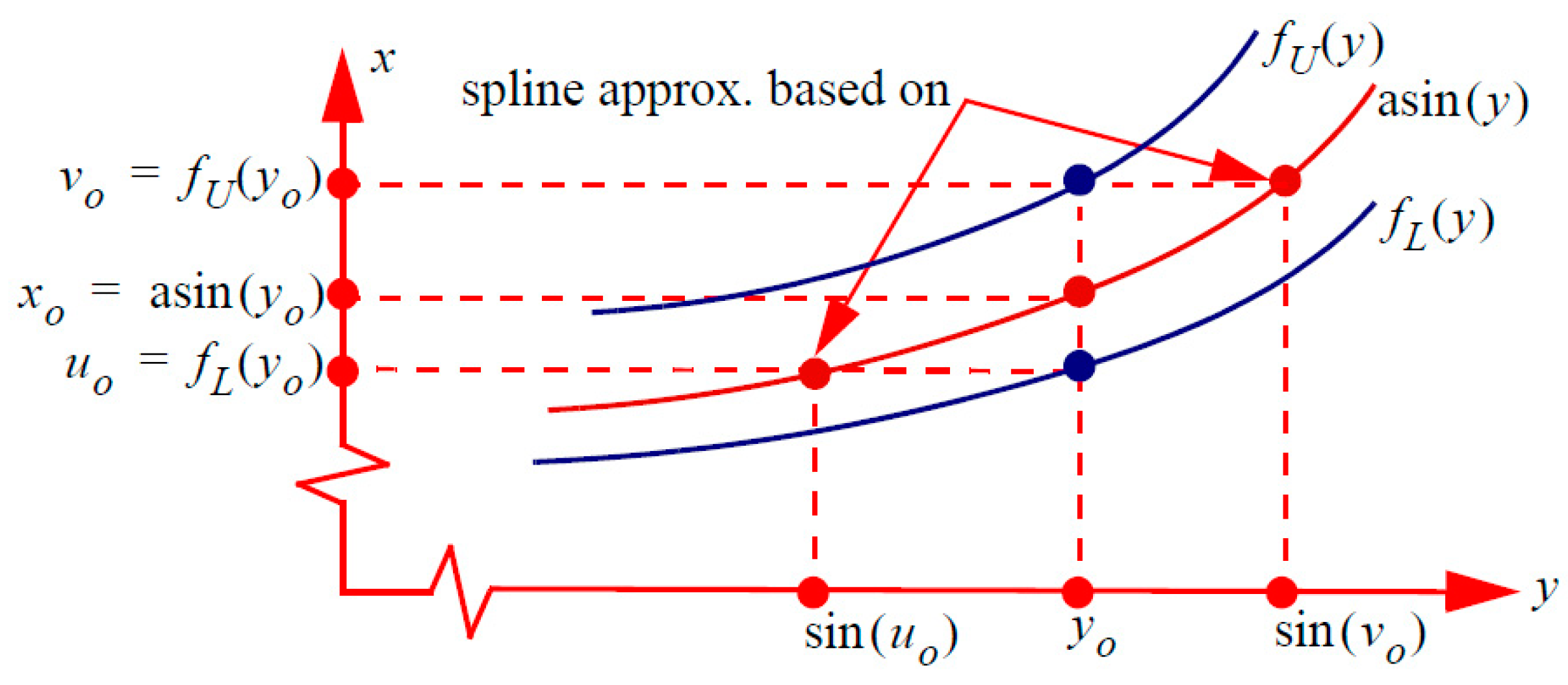
Figure 13.
Illustration of upper and lower bounded approximations to arcsine and the two basis points , for two point spline based approximations.
Figure 13.
Illustration of upper and lower bounded approximations to arcsine and the two basis points , for two point spline based approximations.
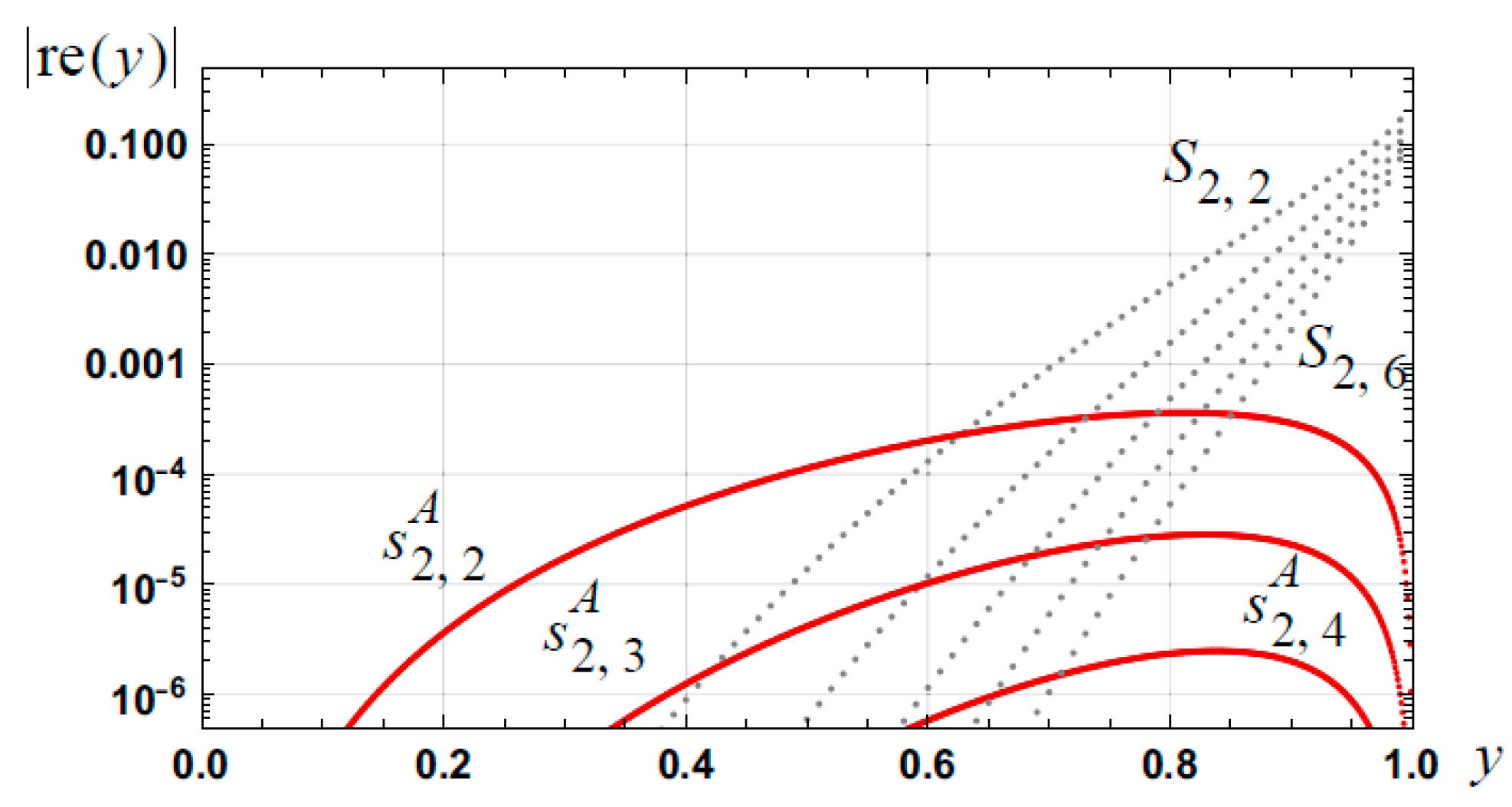
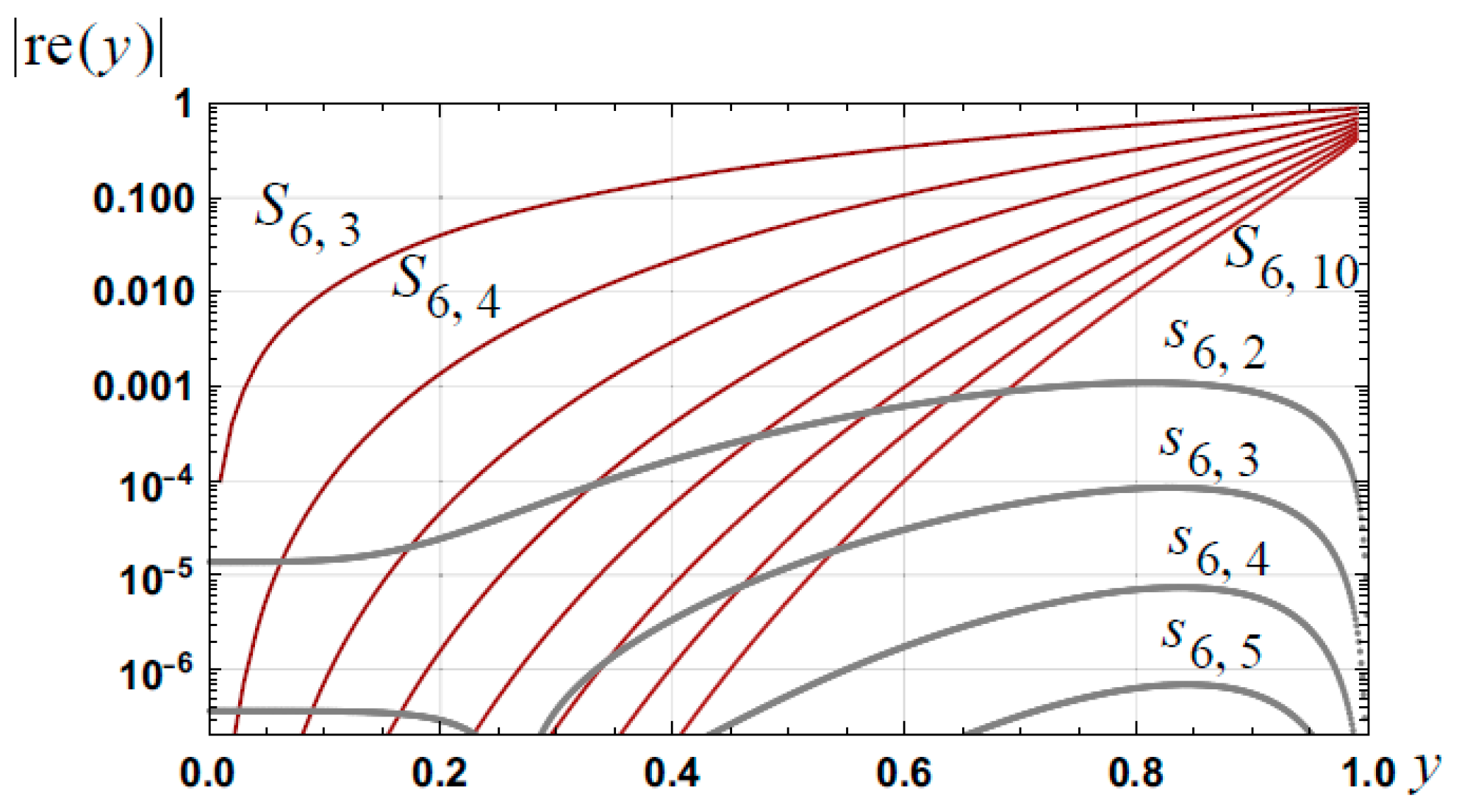
Figure 14.
Graph of the relative errors in approximations to the square of arcsine as given by Equation (123) (orders 2 to 6) and Equation (124) (orders 2 to 4).
Figure 14.
Graph of the relative errors in approximations to the square of arcsine as given by Equation (123) (orders 2 to 6) and Equation (124) (orders 2 to 4).
Figure 15.
Graph of the relative error in approximations to as defined by for , along with root based approximations of orders .
Figure 15.
Graph of the relative error in approximations to as defined by for , along with root based approximations of orders .
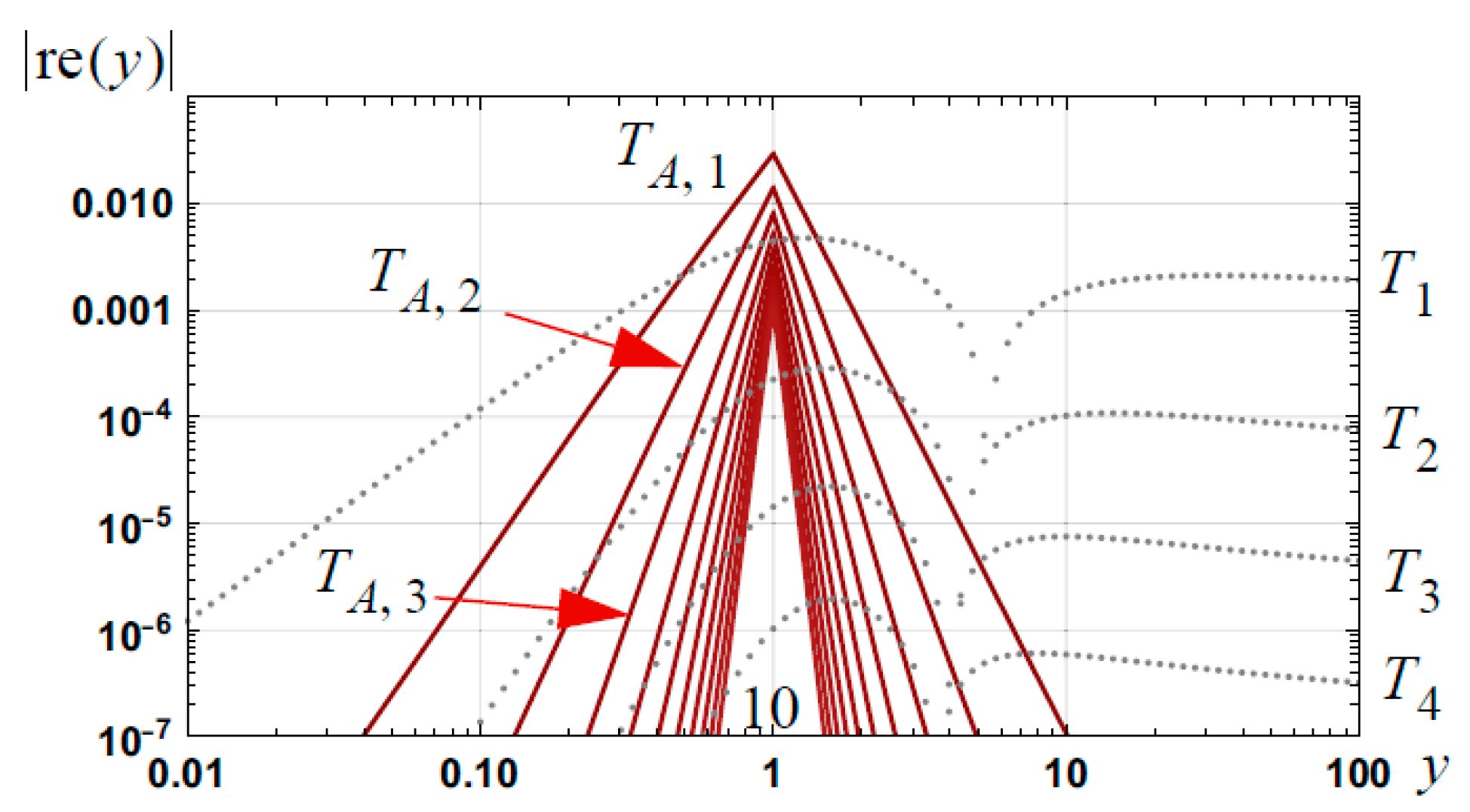
Figure 16.
Graph of the relative errors in the Taylor series (orders one to ten) based approximations for the inverse tangent integral, as given by Equation (138), and the proposed approximations (orders one to four) as specified in Equation (139).
Figure 16.
Graph of the relative errors in the Taylor series (orders one to ten) based approximations for the inverse tangent integral, as given by Equation (138), and the proposed approximations (orders one to four) as specified in Equation (139).
Figure 17.
Graph of the relative errors in the approximations, of orders one to six, as defined by In(y) (Equation (153)).
Figure 17.
Graph of the relative errors in the approximations, of orders one to six, as defined by In(y) (Equation (153)).
Table 1.
Relative error bounds for approximations to r2, arcsine, arccosine and arctangent. The interval [0, 1] is assumed for r2, arcsine and arccosine whilst the interval [0, ∞) is assumed for arctangent.
Table 1.
Relative error bounds for approximations to r2, arcsine, arccosine and arctangent. The interval [0, 1] is assumed for r2, arcsine and arccosine whilst the interval [0, ∞) is assumed for arctangent.
| Order of Approx. | Relative Error Bound: r2 | Relative Error Bound:
| Relative Error Bound:
|
|---|
| 0 | | | |
| 1 | | | |
| 2 | | | |
| 3 | | | |
| 4 | | | |
| 5 | | | |
| 6 | | | |
| 8 | | | |
| 10 | | | |
| 12 | | | |
| 16 | | | |
Table 2.
Relative error bounds, over the interval [0, 1] (arcsine and arccosine) and [0, ∞) (arctangent), associated with the approximations to arcsine, arccosine and arctangent as defined in Theorem 2.
Table 2.
Relative error bounds, over the interval [0, 1] (arcsine and arccosine) and [0, ∞) (arctangent), associated with the approximations to arcsine, arccosine and arctangent as defined in Theorem 2.
| Order of Approx. | Relative Error Bound:
| Relative Error Bound:
|
|---|
| 1 | | |
| 2 | | |
| 3 | | |
| 4 | | |
| 5 | | |
| 6 | | |
| 8 | | |
| 10 | | |
| 12 | | |
| 16 | | |
Table 3.
Relative error bounds associated with the approximations, specified in Theorem 3, for arcsine, arccosine (interval ) and arctangent (interval ).
Table 3.
Relative error bounds associated with the approximations, specified in Theorem 3, for arcsine, arccosine (interval ) and arctangent (interval ).
| Order of Approx. | Relative Error Bound:
|
|---|
| 0 | 0.145 |
| 1 | 2.63 × 10−3 |
| 2 | 1.56 × 10−4 |
| 3 | 1.18 × 10−5 |
| 4 | 1.00 × 10−6 |
| 5 | 9.22 × 10−8 |
| 6 | 8.91 × 10−9 |
| 8 | 9.19 × 10−11 |
| 10 | 1.03 × 10−12 |
| 12 | 1.23 × 10−14 |
| 16 | 1.95 × 10−18 |
Table 4.
Relative error bounds, associated with the approximations detailed in Theorem 5 and Theorem 6 for arcsine, arccosine and arctangent. The interval is assumed for arcsine and arccosine; the interval for arctangent.
Table 4.
Relative error bounds, associated with the approximations detailed in Theorem 5 and Theorem 6 for arcsine, arccosine and arctangent. The interval is assumed for arcsine and arccosine; the interval for arctangent.
| Order of Spline Approx. | Theorem 5—Relative Error Bounds:
| Theorem 6—Relative Error Bound for Arctangent. The Value Assumed for δn,0 is the Second Value Stated in
Equation (92).
|
|---|
| 0 | | |
| 1 | | |
| 2 | | |
| 3 | | |
| 4 | | |
| 5 | | |
| 6 | | |
| 8 | | |
| 10 | | |
Table 5.
Relative error bounds for Newton-Raphson iterative approximations to arcsine and arctangent and based on ,
, and as defined in Theorem 2 and specified by Equations (49) and (50).
Table 5.
Relative error bounds for Newton-Raphson iterative approximations to arcsine and arctangent and based on ,
, and as defined in Theorem 2 and specified by Equations (49) and (50).
| Order of Iteration | Relative Error Bound:
| Relative Error Bound:
| Relative Error Bound:
| Relative Error Bound:
|
|---|
| 0 | | | | |
| 1 | | | | |
| 2 | | | | |
| 3 | | | | |
| 4 | | | | |
| 5 | | | | |
Table 7.
Relative error bounds, over the interval [0, 1], for the approximations detailed in Theorem 9 for and .
Table 7.
Relative error bounds, over the interval [0, 1], for the approximations detailed in Theorem 9 for and .
| Order, n, of Approx. | Precision: Digits in Roots | Relative Error Bound: k = 1 | Relative Error Bound: k = 2 | Relative Error Bound: k = 3 |
|---|
| 2 | 5 | 3.66 × 10−4 | 7.32 × 10−4 | 1.10 × 10−3 |
| 4 | 8 | 2.48 × 10−6 | 4.96 × 10−6 | 7.43 × 10−6 |
| 6 | 9 | 2.25 × 10−8 | 4.49 × 10−8 | 6.74 × 10−8 |
| 8 | 11 | 2.28 × 10−10 | 4.55 × 10−10 | 6.83 × 10−10 |
| 10 | 13 | 2.93 × 10−12 | 5.85 × 10−12 | 8.78 × 10−12 |
Table 8.
Relative error bounds, over the interval , for Taylor series based approximation, and the approximations specified in Equation (139), for the inverse tangent integral function.
Table 8.
Relative error bounds, over the interval , for Taylor series based approximation, and the approximations specified in Equation (139), for the inverse tangent integral function.
|
Relative Error Bound:
Taylor Series
| |
|---|
| 1 | | |
| 2 | | |
| 3 | | |
| 4 | | |
| 5 | | |
| 6 | | |
Table 9.
Table of the relative errors associated with the approximations and as defined by Equations (152) and (154).
Table 9.
Table of the relative errors associated with the approximations and as defined by Equations (152) and (154).
| Order of Approx: n | | | |
|---|
| 1 | | | |
| 2 | | | |
| 3 | | | |
| 4 | | | |
| 6 | | | |
| 8 | | | |
| 10 | | | |
Table 10.
Approximations for arcsine. The coefficients , and are defined in the associated reference.
Table 10.
Approximations for arcsine. The coefficients , and are defined in the associated reference.
| Reference | Approximation for Arcsine of Order n | Relative Error Bound for [0, 1], n = 4 |
|---|
| Corollary 1 | |
|
| Theorem 2 | |
|
| Theorem 3 | | |
Theorem 5
(Equation (86)) | | |
Table 11.
Approximations for arctangent. The coefficients , and are defined in the associated reference.
Table 11.
Approximations for arctangent. The coefficients , and are defined in the associated reference.
| Reference | | |
|---|
| Corollary 1 | |
|
| Theorem 2 | |
|
| Theorem 3 | | |
| Theorem 5 | | |
| Theorem 6 | | |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















