
A New RTI Portable Instrument for Surface Morphological Characterization



Abstract
1. Introduction
2. Design
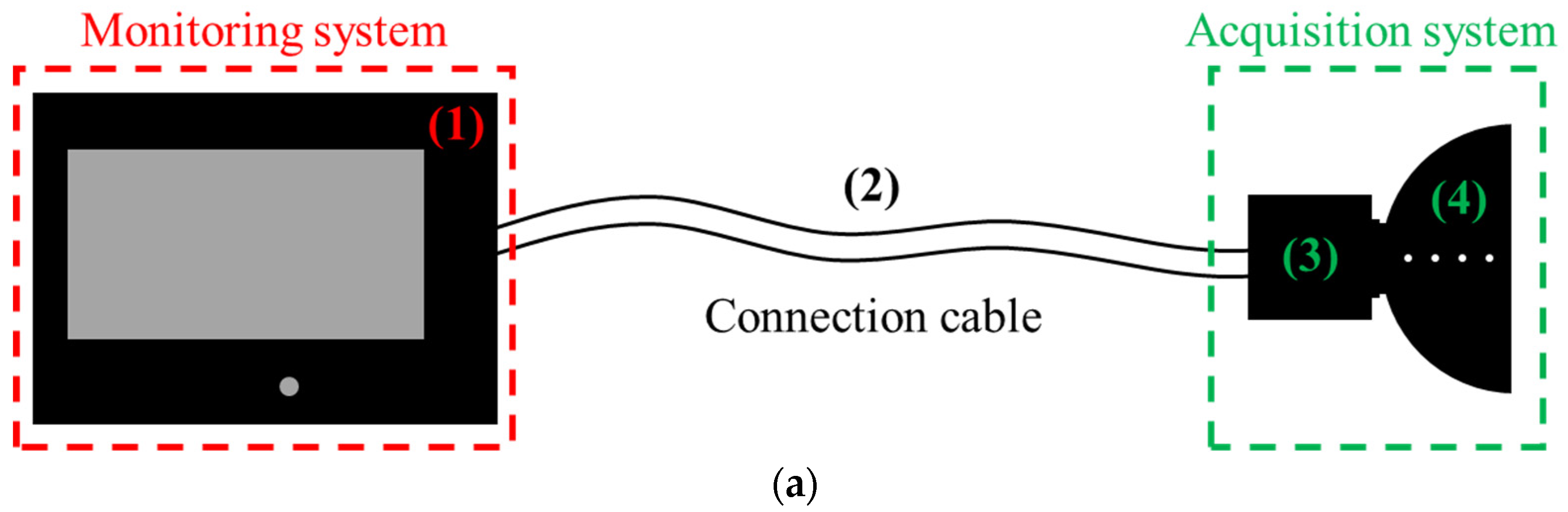
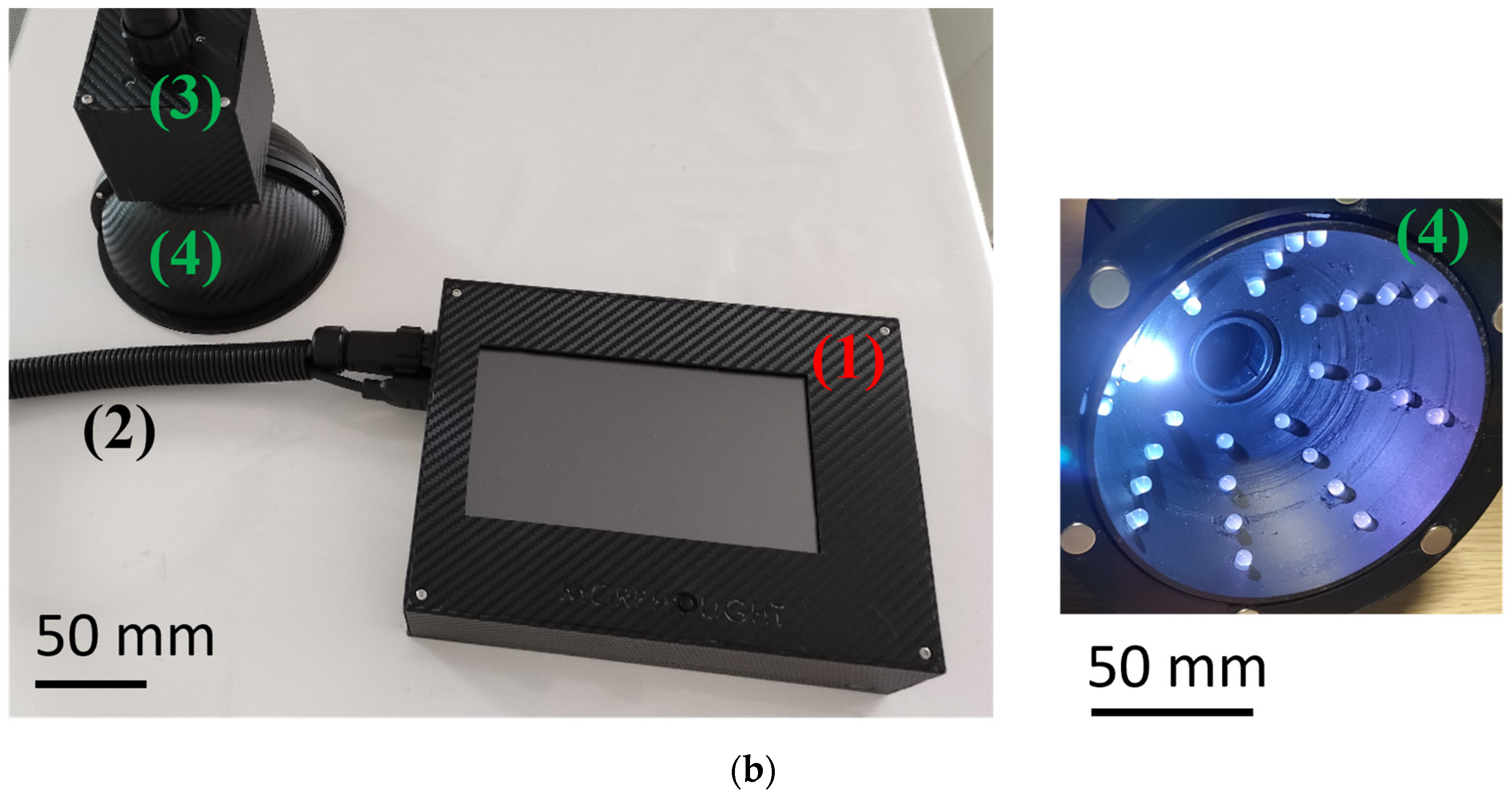
2.1. Global Description of the New RTI Instrument
- Berezhnoy et al. [39] showed that the brushstrokes are mainly oriented at 0°, 90° and 180°;
- Karimov et al. [40] studied the orientation of brushstrokes for several painters and showed that a lot of brushstrokes are oriented at 45° according to the painter (each painter has a personal gesture);
- The angle 45° is confirmed by Sablatnig et al. [41], as well as the angle 135°.
2.2. High-Resolution Imaging Functions
2.2.1. High Dynamic Range Mode
2.2.2. Focus Stacking Mode
2.2.3. Combination of Imaging Functions
3. Build Instructions
- Printing in 3D the monitoring box, the acquisition box, and the half-sphere using polylactic acid (PLA);
- Installing the lighting sources:
- Positioning the LEDs on the half-sphere and soldering them;
- Soldering connecting wires to the pins of the first LED (5V, ground and signal IN); the length of these wires depends on the length which is necessary between the acquisition system and the monitoring system.
- Installing the camera:
- Placing and fixing the camera into the acquisition box;
- Connecting the cables (4 connecting wires and 1 cable FPC) to the camera (the cables must have the same length than the LED wires).
- Installing the Raspberry OS for the use of the graphical interface:
- Mounting a microSD card (a minimum of 32GB is recommended) on a computer;
- Flashing the microSD card with the Raspberry Pi OS recommended by the software Raspberry Pi Imager (v1.8.5) and including a desktop;
- Inserting the flashed microSD on the Raspberry Pi card.
- Installing the components of the monitoring system into its box:
- Fixing the Raspberry card into the monitoring box;
- Fixing the Arduino card into the box;
- Placing the powerbank into the box;
- Fixing the screen on the box cover.
- Connecting the components:
- Passing the LED wires from the lighting half-sphere through a rigid cable (especially used to protect cables in situ) and connecting them to the Arduino pins;
- Passing the camera cables through the rigid cable and connecting them to the Raspberry card;
- Connecting the Arduino card to the Raspberry card;
- Connecting the screen to the Raspberry card;
- Connecting the powerbank to a switch and connecting the switch to the Raspberry card.
- Running the Raspberry system and updating it;
- Testing the camera and the LEDs using the scripts provided by the suppliers or manufacturers.
4. Operating Instructions
4.1. RTI Measurements
4.2. Generation of Geometrical Maps
4.3. Topographical and Statistical Analyses
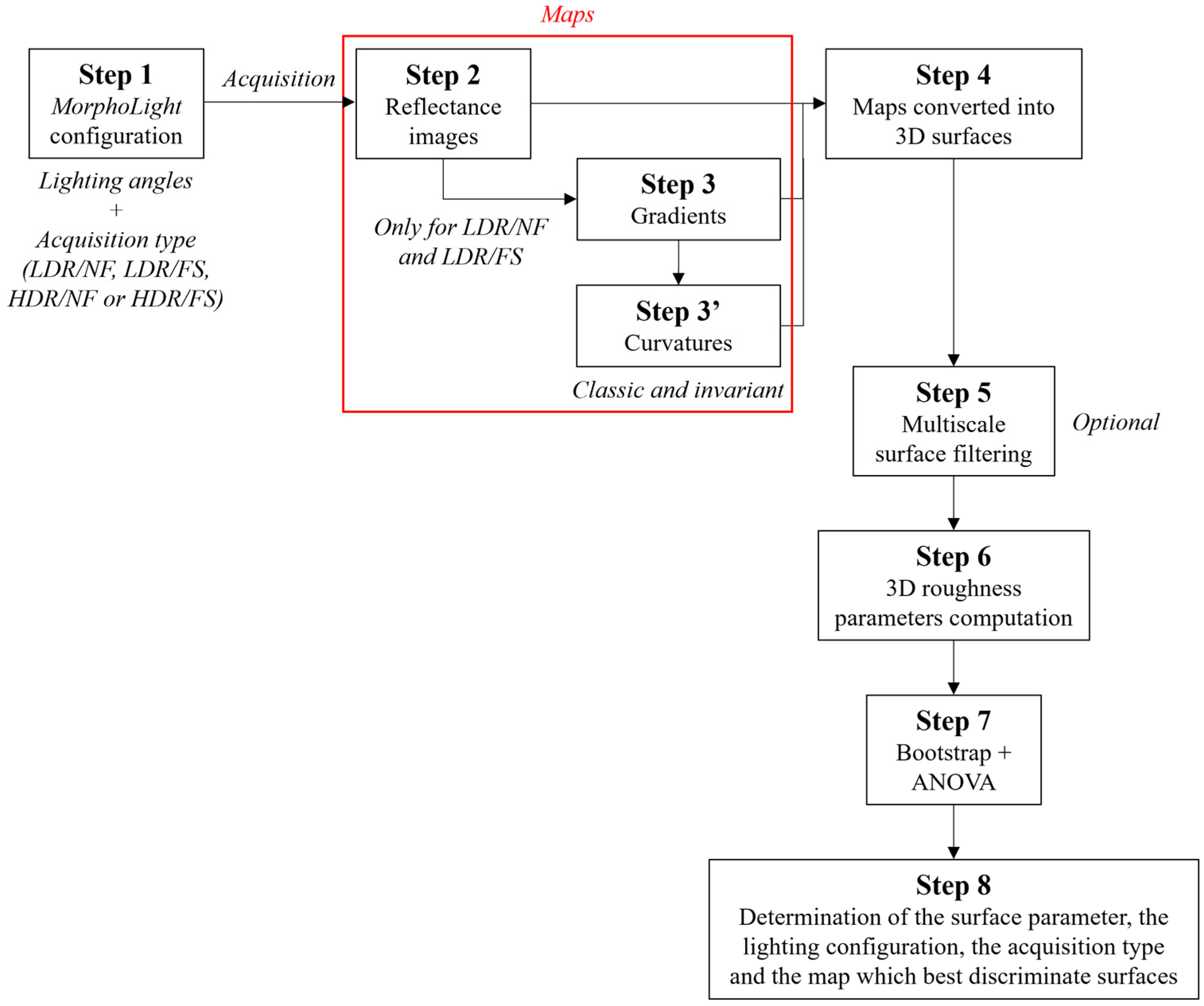
4.4. Methodology Summary
5. Validation
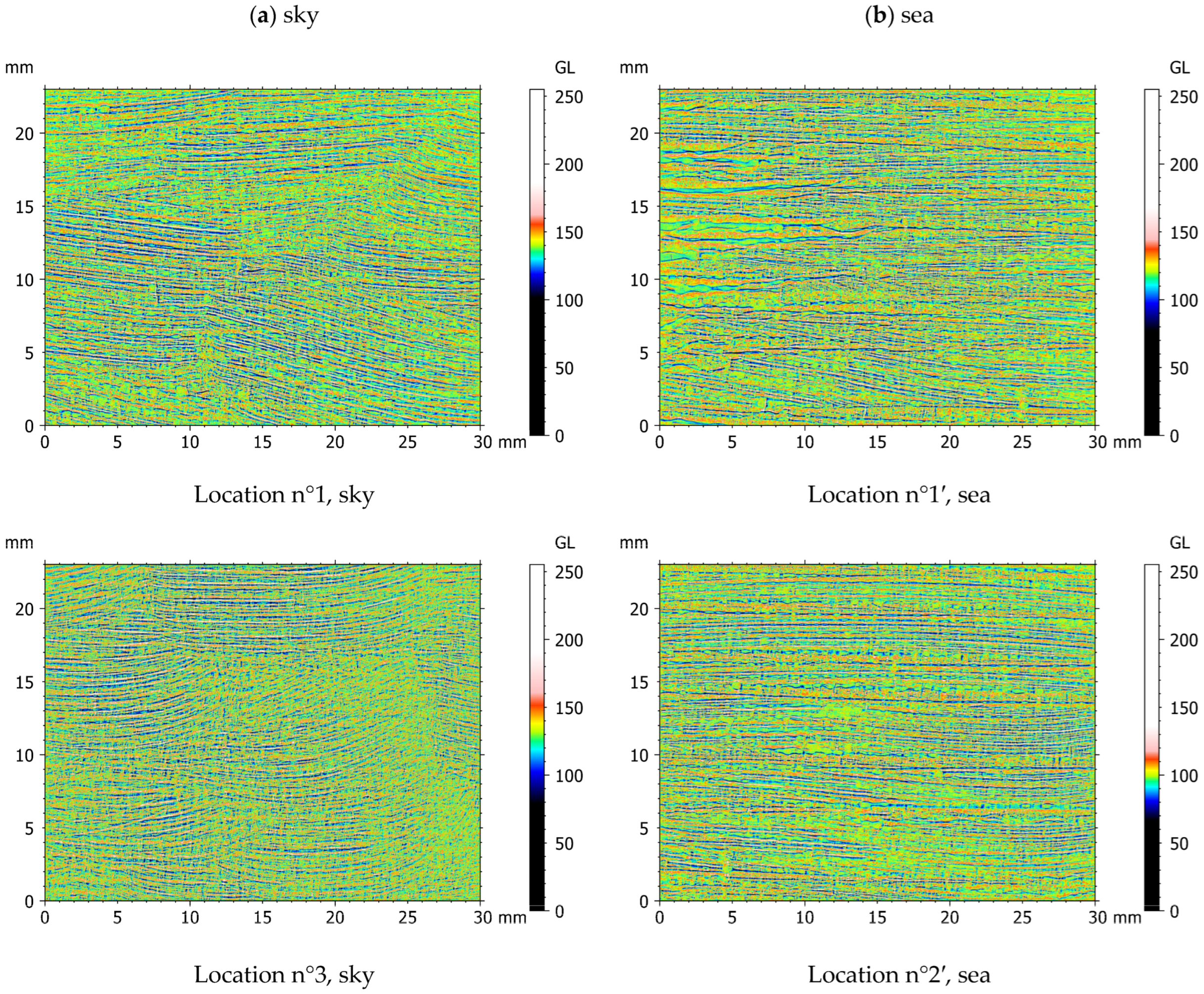
5.1. Geometrical Maps
5.2. Reflectance Images
6. Conclusions
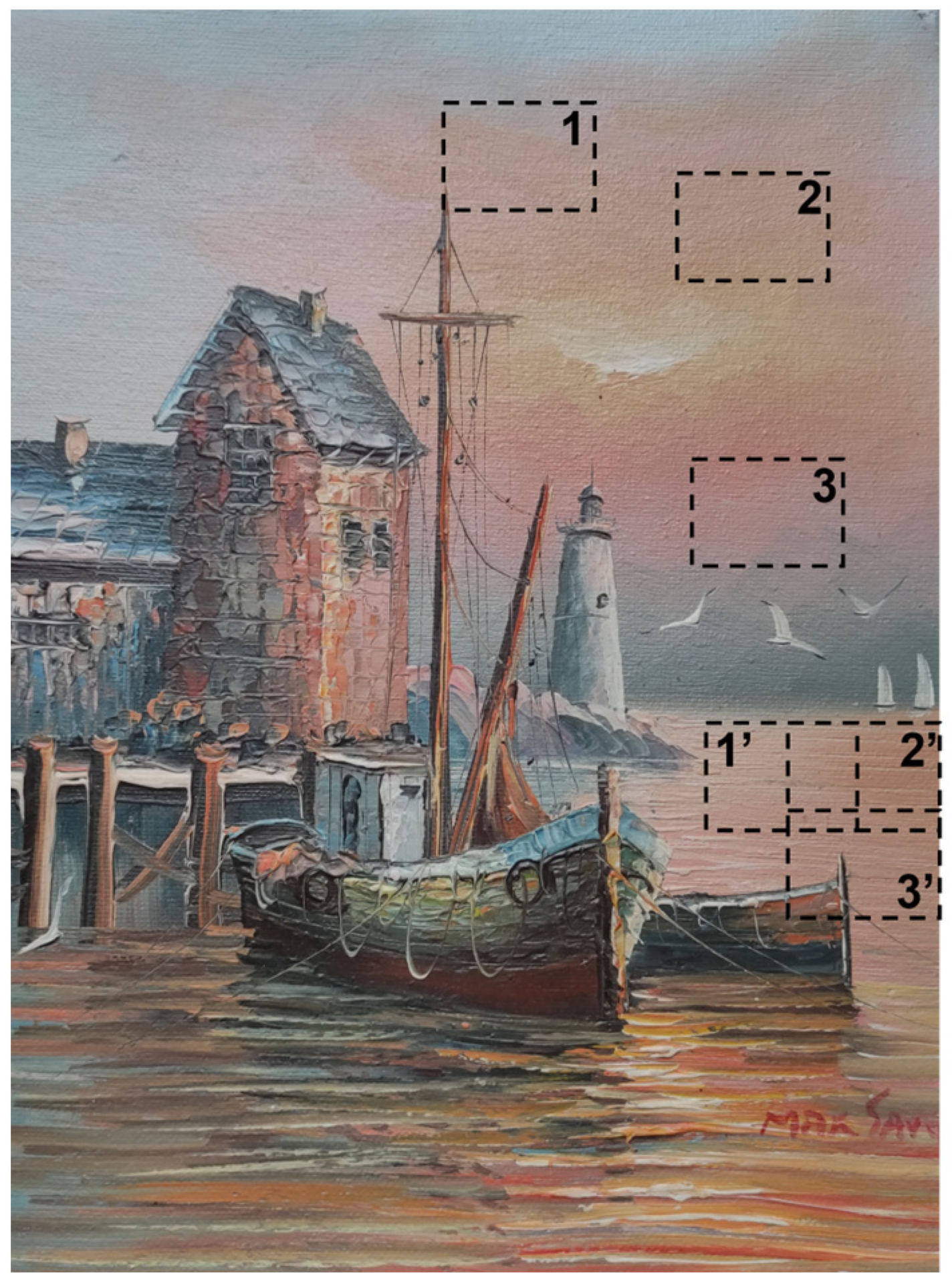
- MorphoLight is able to see a difference in painting strokes between two close color zones;
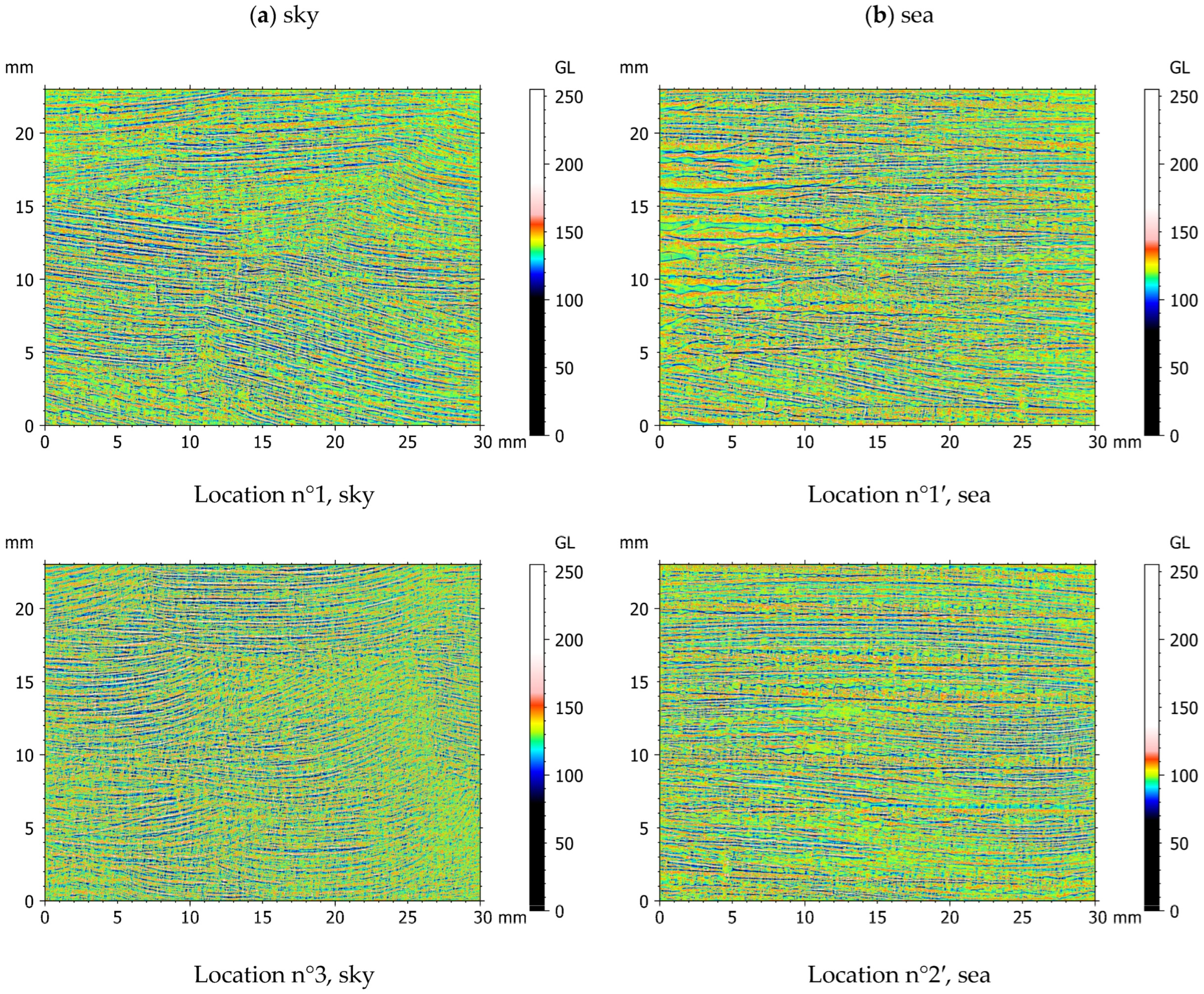
- The density of peaks, Spd, is higher for the sky part regarding the mean curvature maps due to a lot of fine brushstrokes;
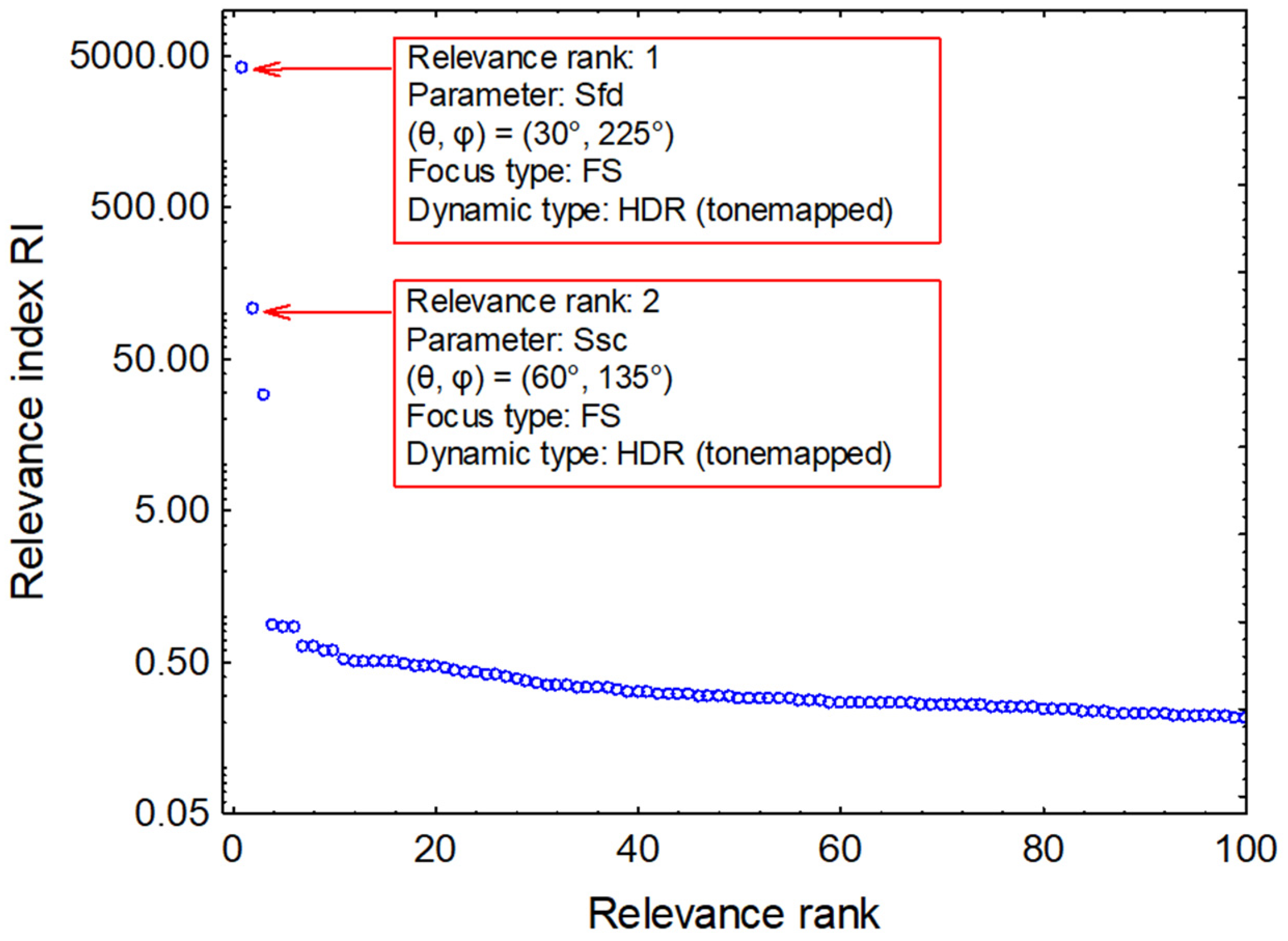
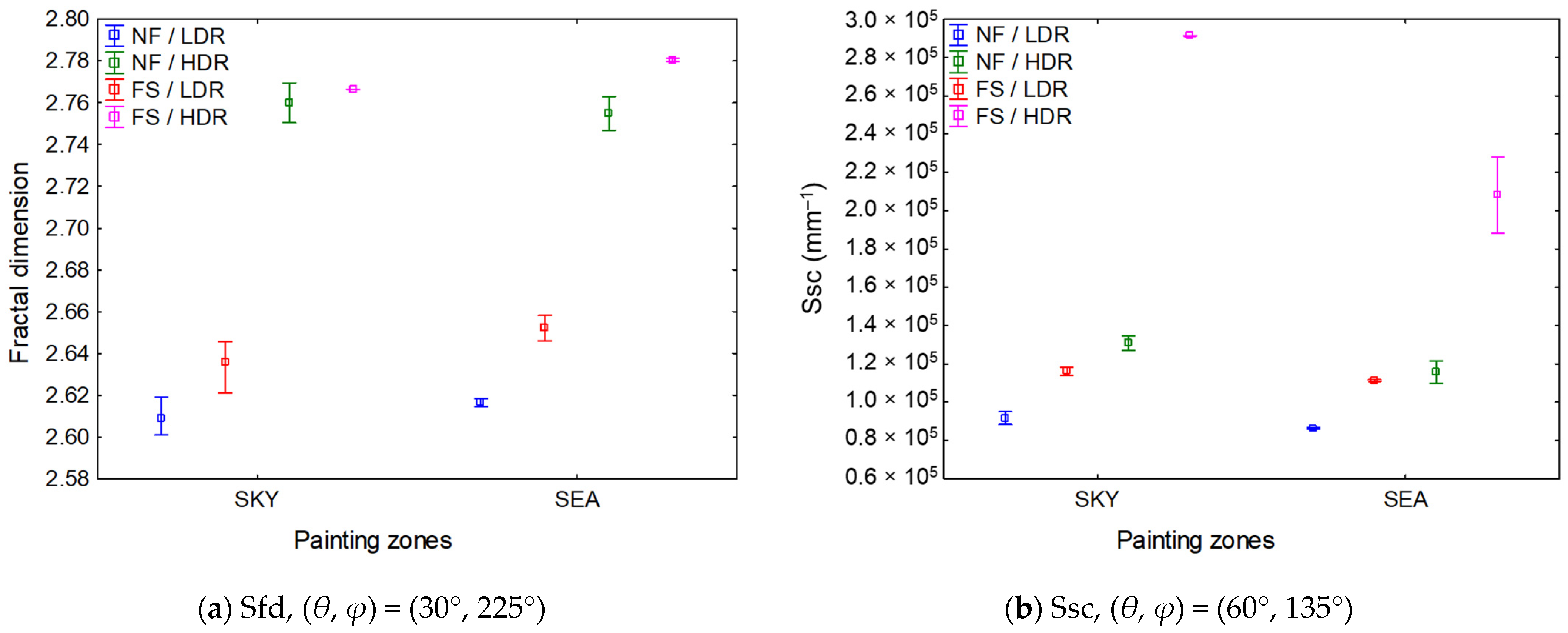
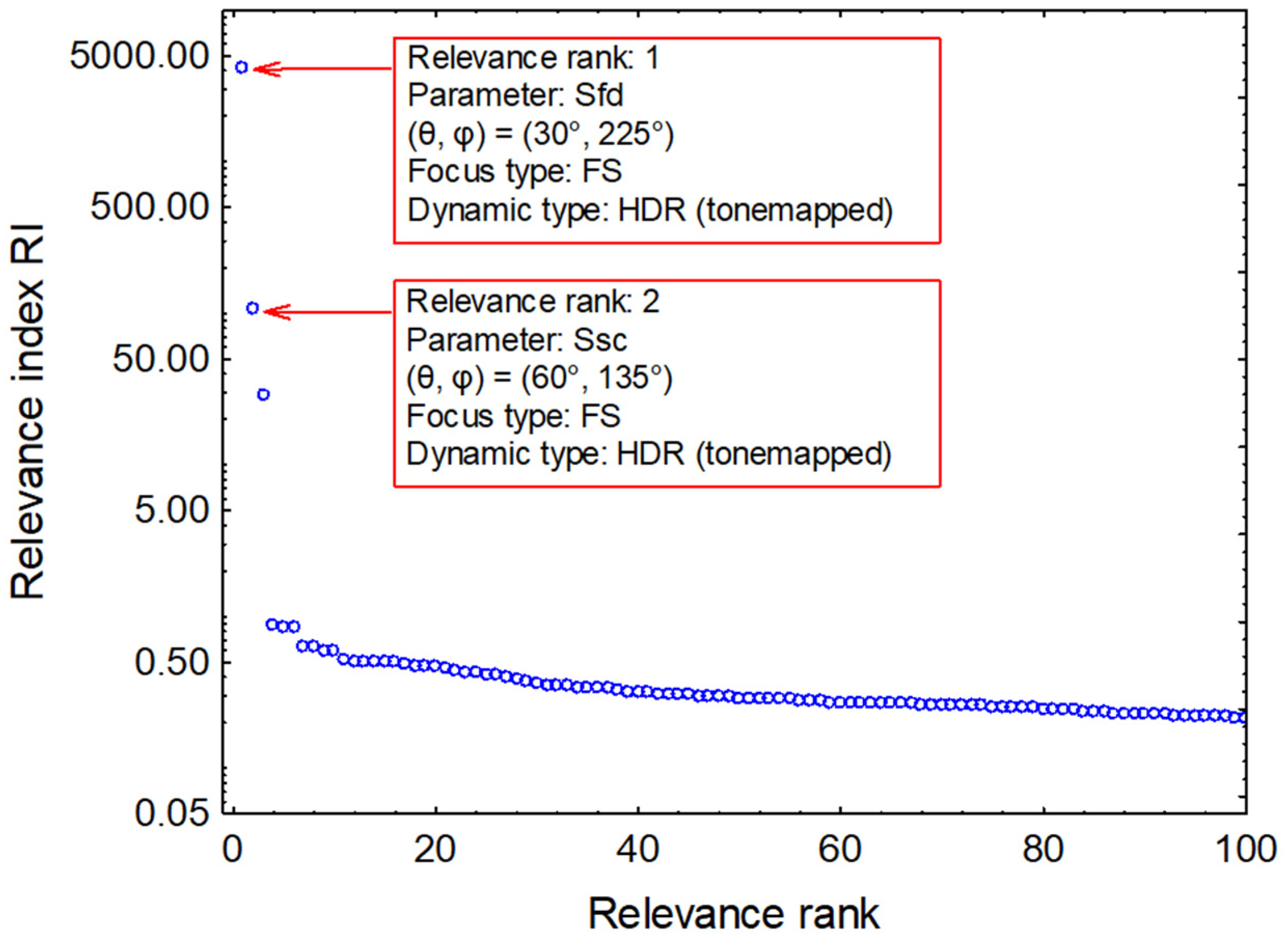
- The fractal dimension highlights the difference between both painting zones at the whole scale range for high-resolution images (stacked and tonemapped) at a lighting position (θ, φ) = (30°, 225°). The sea part is more heterogeneous, rougher and has lower curvatures: the sky reflection on the sea is represented by large ripples;
- The high-resolution imaging functions, focus stacking and high dynamic range, improve the reflectance image quality and the topographical interpretation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviations | |
| ANOVA | ANalysis Of VAriance |
| CCD | Charge-Coupled Device |
| CRF | Camera Response Function |
| FS | Focus Stacking |
| HDR | High Dynamic Range |
| LDR | Low Dynamic Range |
| NF | Normal Focus |
| PLA | PolyLactic Acid |
| RTI | Reflectance Transformation Imaging |
| SGCLR | Surface Gradient Characterization by Light Reflectance |
| XRF | X-ray Fluorescence |
| Surface characterization parameters (3D) | |
| S10z | Ten points height |
| Sa | Arithmetic mean height |
| Sdq | Root mean square gradient |
| Sdr | Developed interfacial area ratio |
| Sfd | Fractal dimension |
| Spc | Arithmetic mean peak curvature |
| Spd | Density of peaks |
| Ssc | Arithmetic mean summit curvature |
| Std | Texture direction |
| Reflectance parameters | |
| θ | Lighting elevation |
| ρ | Maximum surface reflectance |
| φ | Lighting azimuth |
| H | Mean curvature |
| I | Pixel intensity vector |
| K | Curvature matrix |
| K1 | Minimum principal curvature |
| K2 | Maximum principal curvature |
| Kg | Gaussian curvature |
| KME | Mehlum curvature |
| L | Lighting position matrix |
| n | Normals |
| Statistical parameters | |
| F | Relevance value from ANOVA |
| P95 | 95th percentile |
| P5 | 5th percentile |
| RI | Relevance index |
References
- Malzbender, T.; Gelb, D.; Wolters, H. Polynomial Texture Maps. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques—SIGGRAPH’01, Los Angeles, CA, USA, 12–17 August 2001; ACM Press: New York, NY, USA, 2001; pp. 519–528. [Google Scholar]
- Hughes-Hallett, M.; Young, C.; Messier, P. A Review of RTI and an Investigation into the Applicability of Micro-RTI as a Tool for the Documentation and Conservation of Modern and Contemporary Paintings. J. Am. Inst. Conserv. 2021, 60, 18–31. [Google Scholar] [CrossRef]
- Min, J.; Jeong, S.; Park, K.; Choi, Y.; Lee, D.; Ahn, J.; Har, D.; Ahn, S. Reflectance Transformation Imaging for Documenting Changes through Treatment of Joseon Dynasty Coins. Herit. Sci. 2021, 9, 105. [Google Scholar] [CrossRef]
- Mudge, M.; Malzbender, T.; Schroer, C.; Lum, M. New Reflection Transformation Imaging Methods for Rock Art and Multiple-Viewpoint Display. In Proceedings of the 7th International Symposium on Virtual Reality, Archaeology and Cultural Heritage, Nicosia, Cyprus, 30 October–4 November 2006. [Google Scholar] [CrossRef]
- Mytum, H.; Peterson, J.R. The Application of Reflectance Transformation Imaging (RTI) in Historical Archaeology. Hist. Archaeol. 2018, 52, 489–503. [Google Scholar] [CrossRef]
- Florindi, S.; Revedin, A.; Aranguren, B.; Palleschi, V. Application of Reflectance Transformation Imaging to Experimental Archaeology Studies. Heritage 2020, 3, 1279–1286. [Google Scholar] [CrossRef]
- Grzelec, M.; Łojewski, T. Applications of Reflectance Transformation Imaging (RTI) for Books and Objects on Paper. J. Pap. Conserv. 2023, 24, 16–30. [Google Scholar] [CrossRef]
- Selmo, D.; Sturt, F.; Miles, J.; Basford, P.; Malzbender, T.; Martinez, K.; Thompson, C.; Earl, G.; Bevan, G. Underwater Reflectance Transformation Imaging: A Technology for in Situ Underwater Cultural Heritage Object-Level Recording. J. Electron. Imaging 2017, 26, 011029. [Google Scholar] [CrossRef]
- Lemesle, J.; Robache, F.; Goic, G.; Mansouri, A.; Brown, C.; Bigerelle, M. Surface Reflectance: An Optical Method for Multiscale Curvature Characterization of Wear on Ceramic–Metal Composites. Materials 2020, 13, 1024. [Google Scholar] [CrossRef]
- Pitard, G.; Le Goïc, G.; Mansouri, A.; Favrelière, H.; Pillet, M.; George, S.; Hardeberg, J.Y. Robust Anomaly Detection Using Reflectance Transformation Imaging for Surface Quality Inspection. In Image Analysis: 20th Scandinavian Conference, SCIA 2017, Tromsø, Norway, June 12–14, 2017, Proceedings, Part I; Springer: Cham, Switzerland, 2017; pp. 550–561. [Google Scholar] [CrossRef]
- Siatou, A.; Castro, Y.; Nurit, M.; Chatoux, H.; le Goïc, G.; Degrigny, C.; Brambilla, L.; Mansouri, A. A Methodological Approach for Multi-Temporal Tracking of Silver Tarnishing. In Proceedings of the 4th ACM International Workshop on Structuring and Understanding of Multimedia heritAge Contents, New York, NY, USA, 10 October 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 5–13. [Google Scholar]
- Coules, H.E.; Orrock, P.J.; Seow, C.E. Reflectance Transformation Imaging as a Tool for Engineering Failure Analysis. Eng. Fail. Anal. 2019, 105, 1006–1017. [Google Scholar] [CrossRef]
- Goïc, G.L.; Benali, A.; Nurit, M.; Cellard, C.; Sohier, L.; Mansouri, A.; Moretti, A.; Créac’hcadec, R. Reflectance Transformation Imaging for the Quantitative Characterization of Experimental Fracture Surfaces of Bonded Assemblies. Eng. Fail. Anal. 2022, 140, 106582. [Google Scholar] [CrossRef]
- Siatou, A.; Nurit, M.; Saha, S.; Le Goïc, G.; Brambilla, L.; Degrigny, C.; Sitnik, R.; Mansouri, A. Reflectance Transformation Imaging (RTI) Data Analysis for Change Detection: Application to Monitoring Protective Coating Failure on Low Carbon Steel. Arch. Conf. 2023, 20, 42–47. [Google Scholar] [CrossRef]
- Gautron, P.; Krivanek, J.; Pattanaik, S.; Bouatouch, K. A Novel Hemispherical Basis for Accurate and Efficient Rendering. Eurograph. Symp. Render. 2004, 2004, 321–330. [Google Scholar]
- Pitard, G.; Le Goïc, G.; Favrelière, H.; Samper, S.; Desage, S.-F.; Pillet, M. Discrete Modal Decomposition for Surface Appearance Modelling and Rendering. In Proceedings of the Optical Measurement Systems for Industrial Inspection IX, Munich, Germany, 22–25 June 2015; Volume 9525. [Google Scholar]
- Webb, N.; Hillson, J.; Peterson, J.R.; Buchanan, A.; Duffy, S. Documentation and Analysis of a Medieval Tracing Floor Using Photogrammetry, Reflectance Transformation Imaging and Laser Scanning. In Proceedings of the ECAADE 2020: Anthropologic—Architecture and Fabrication in the Cognitive Age, Berlin, Germany, 16–18 September 2020; eCAADe: Berlin, Germany, 2020; Volume 2, pp. 209–218. [Google Scholar]
- Luxman, R.; Castro, Y.E.; Chatoux, H.; Nurit, M.; Siatou, A.; Le Goïc, G.; Brambilla, L.; Degrigny, C.; Marzani, F.; Mansouri, A. LightBot: A Multi-Light Position Robotic Acquisition System for Adaptive Capturing of Cultural Heritage Surfaces. J. Imaging 2022, 8, 134. [Google Scholar] [CrossRef]
- Nurit, M.; Le Goïc, G.; Lewis, D.; Castro, Y.; Zendagui, A.; Chatoux, H.; Favrelière, H.; Maniglier, S.; Jochum, P.; Mansouri, A. HD-RTI: An Adaptive Multi-Light Imaging Approach for the Quality Assessment of Manufactured Surfaces. Comput. Ind. 2021, 132, 103500. [Google Scholar] [CrossRef]
- Cultural Heritage Imaging; Reflectance Transformation Imaging: Guide to Highlight Image Processing, Version 1.4. 2011. Available online: https://culturalheritageimaging.org/What_We_Offer/Downloads/rtibuilder/RTI_hlt_Processing_Guide_v14_beta.pdf (accessed on 25 March 2024).
- Pitard, G.; Le Goïc, G.; Mansouri, A.; Favrelière, H.; Desage, S.-F.; Samper, S.; Pillet, M. Discrete Modal Decomposition: A New Approach for the Reflectance Modeling and Rendering of Real Surfaces. Mach. Vis. Appl. 2017, 28, 607–621. [Google Scholar] [CrossRef]
- Porter, S.T.; Huber, N.; Hoyer, C.; Floss, H. Portable and Low-Cost Solutions to the Imaging of Paleolithic Art Objects: A Comparison of Photogrammetry and Reflectance Transformation Imaging. J. Archaeol. Sci. Rep. 2016, 10, 859–863. [Google Scholar] [CrossRef]
- Corregidor, V.; Dias, R.; Catarino, N.; Cruz, C.; Alves, L.C.; Cruz, J. Arduino-Controlled Reflectance Transformation Imaging to the Study of Cultural Heritage Objects. SN Appl. Sci. 2020, 2, 1586. [Google Scholar] [CrossRef]
- Vietti, A.; Parvis, M.; Donato, N.; Grassini, S.; Lombardo, L. Development of a Low-Cost and Portable Device for Reflectance Transformation Imaging. In Proceedings of the 2023 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Kuala Lumpur, Malaysia, 22 May 2023; IEEE: Kuala Lumpur, Malaysia, 2023; pp. 1–6. [Google Scholar]
- Ahmadi, S.; Hubbard, T. 3D Illumination For Inspection Of Mechanical Parts. In Proceedings of the Progress in Canadian Mechanical Engineering, Charlottetown, PE, Canada, 21–24 June 2020; University of Prince Edward Island, Robertson Library: Charlottetown, PE, Canada, 2021; Volume 4. [Google Scholar]
- Pistellato, M.; Bergamasco, F. On-the-Go Reflectance Transformation Imaging with Ordinary Smartphones. In Proceedings of the Computer Vision—ECCV 2022 Workshops, Tel Aviv, Israel, 23–27 October 2022; Karlinsky, L., Michaeli, T., Nishino, K., Eds.; Springer: Cham, Switzerland, 2023; pp. 251–267. [Google Scholar]
- Manfredi, M.; Bearman, G.; Williamson, G.; Kronkright, D.; Doehne, E.; Jacobs, M.; Marengo, E. A New Quantitative Method for the Non-Invasive Documentation of Morphological Damage in Paintings Using RTI Surface Normals. Sensors 2014, 14, 12271–12284. [Google Scholar] [CrossRef] [PubMed]
- Robson, S.; MacDonald, L.; Sargeant, B. Metrology Enabled Reflection Transformation Imaging To Reconstruct Local Detail In Manufactured Surfaces. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B2-2020, 797–804. [Google Scholar] [CrossRef]
- van Asperen de Boer, J.R.J. An Introduction to the Scientific Examination of Paintings. Ned. Kunsthist. Jaarb. NKJ Neth. Yearb. Hist. Art 1975, 26, 1–40. [Google Scholar] [CrossRef]
- Gavrilov, D.; Maev, R.G.; Almond, D.P. A Review of Imaging Methods in Analysis of Works of Art: Thermographic Imaging Method in Art Analysis. Can. J. Phys. 2014, 92, 341–364. [Google Scholar] [CrossRef]
- Alfeld, M.; de Viguerie, L. Recent Developments in Spectroscopic Imaging Techniques for Historical Paintings—A Review. Spectrochim. Acta Part B At. Spectrosc. 2017, 136, 81–105. [Google Scholar] [CrossRef]
- Pérez-Alonso, M.; Castro, K.; Madariaga, J.M. Investigation of Degradation Mechanisms by Portable Raman Spectroscopy and Thermodynamic Speciation: The Wall Painting of Santa María de Lemoniz (Basque Country, North of Spain). Anal. Chim. Acta 2006, 571, 121–128. [Google Scholar] [CrossRef]
- Van Asperen De Boer, J.R.J. Infrared Reflectography: A Method for the Examination of Paintings. Appl. Opt. 1968, 7, 1711. [Google Scholar] [CrossRef] [PubMed]
- Daffara, C.; Fontana, R. Multispectral Infrared Reflectography to Differentiate Features in Paintings. Microsc. Microanal. 2011, 17, 691–695. [Google Scholar] [CrossRef] [PubMed]
- Miliani, C.; Doherty, B.; Daveri, A.; Loesch, A.; Ulbricht, H.; Brunetti, B.G.; Sgamellotti, A. In Situ Non-Invasive Investigation on the Painting Techniques of Early Meissen Stoneware. Spectrochim. Acta A Mol. Biomol. Spectrosc. 2009, 73, 587–592. [Google Scholar] [CrossRef]
- Botteon, A.; Colombo, C.; Realini, M.; Castiglioni, C.; Piccirillo, A.; Matousek, P.; Conti, C. Non-invasive and in Situ Investigation of Layers Sequence in Panel Paintings by Portable Micro-spatially Offset Raman Spectroscopy. J. Raman Spectrosc. 2020, 51, 2016–2021. [Google Scholar] [CrossRef]
- Alfeld, M.; Pedroso, J.V.; Van Eikema Hommes, M.; Van Der Snickt, G.; Tauber, G.; Blaas, J.; Haschke, M.; Erler, K.; Dik, J.; Janssens, K. A Mobile Instrument for in Situ Scanning Macro-XRF Investigation of Historical Paintings. J. Anal. At. Spectrom. 2013, 28, 760. [Google Scholar] [CrossRef]
- Bigerelle, M.; Guibert, R.; Mironova, A.; Robache, F.; Deltombe, R.; Nys, L.; Brown, C.A. Fractal and Statistical Characterization of Brushstroke on Paintings. Surf. Topogr. Metrol. Prop. 2023, 11, 015019. [Google Scholar] [CrossRef]
- Berezhnoy, I.E.; Postma, E.O.; van den Herik, H.J. Automatic Extraction of Brushstroke Orientation from Paintings. Mach. Vis. Appl. 2009, 20, 1–9. [Google Scholar] [CrossRef]
- Karimov, A.; Kopets, E.; Shpilevaya, T.; Katser, E.; Leonov, S.; Butusov, D. Comparing Neural Style Transfer and Gradient-Based Algorithms in Brushstroke Rendering Tasks. Mathematics 2023, 11, 2255. [Google Scholar] [CrossRef]
- Sablatnig, R.; Kammerer, P.; Zolda, E. Structural Analysis of Paintings Based on Brush Strokes. In Proceedings Volume 3315, Scientific Detection of Fakery in Art, Proceedings of the Photonics West ’98 Electronic Imaging, San Jose, CA, USA, 24–30 January 1998; SPIE: Bellingham, WA, USA; pp. 87–98.
- Debevec, P.E.; Malik, J. Recovering High Dynamic Range Radiance Maps from Photographs. In Proceedings of the 24th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 3–8 August 1997; ACM Press/Addison-Wesley Publishing Co.: New York, NY, USA, 1997; pp. 369–378. [Google Scholar]
- Woodham, R.J. Photometric Method for Determining Surface Orientation from Multiple Images. Opt. Eng. 1980, 19, 139–144. [Google Scholar] [CrossRef]
- ISO 25178-2; Geometrical Product Specifications (GPS)—Surface Texture: Areal—Part 2: Terms, Definitions and Surface Texture Parameters. International Organization for Standardization: Geneva, Switzerland, 2021.
- BCR Report EUR 15178N; The Development of Methods for the Characterisation of Roughness in THREE Dimensions—K.J. STOUT et al.—DG XII–E.C. 1993. Available online: https://shop.elsevier.com/books/development-of-methods-for-characterisation-of-roughness-in-three-dimensions/stout/978-1-85718-023-7 (accessed on 25 March 2024).
- Loganina, V.; Fediuk, R.; Lesovik, V.; Amran, M.; Qader, D.N.; Litvinets, O.; Okhotkina, V.; Rashid, R.S.M.; Lomov, M.; Moskovaya, I. Evaluation of Some Composite Paint Coatings’ Appearance Quality Using Fractal Dimension. J. Compos. Sci. 2023, 7, 9. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Mode | Benefits | Drawbacks |
|---|---|---|
| LDR/NF |
|
|
| LDR/FS |
|
|
| HDR/NF |
|
|
| HDR/FS |
|
|
| Type | Parameter | Name (Standard) | Description |
|---|---|---|---|
| Height | Sa | Arithmetic mean height (ISO 25178 [44]) | Mean height difference of each surface point compared to the mean surface plane |
| Spatial | Std | Texture direction (ISO 25178) | Angular direction of the surface texture relative to the Y axis |
| Hybrid | Sdq | Root mean square gradient (ISO 25178) | Mean value of the local surface slopes |
| Hybrid | Sdr | Developed interfacial area ratio (ISO 25178) | Percentage of surface area added by the surface texture on an ideally smooth, flat surface |
| Hybrid | Sfd | Fractal dimension (EUR 15178N [45]) | Regularity degree of a surface |
| Hybrid | Ssc | Arithmetic mean summit 1 curvature (EUR 15178N) | Information on the shape and size of the high surface features (especially studied for surface contacts) |
| Feature | Spd | Density of peaks (ISO 25178) | Number of peaks per unit of area |
| Feature | Spc | Arithmetic mean peak 2 curvature (ISO 25178) | Information on the shape and size of the high surface features (especially studied for surface contacts) |
| Feature | S10z | Ten points height (ISO 25178) | Sum of the mean height of the five highest peaks and the mean height of the five deepest valleys |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lemesle, J.; Bigerelle, M. A New RTI Portable Instrument for Surface Morphological Characterization. Hardware 2024, 2, 66-84. https://doi.org/10.3390/hardware2020004
Lemesle J, Bigerelle M. A New RTI Portable Instrument for Surface Morphological Characterization. Hardware. 2024; 2(2):66-84. https://doi.org/10.3390/hardware2020004
Chicago/Turabian StyleLemesle, Julie, and Maxence Bigerelle. 2024. "A New RTI Portable Instrument for Surface Morphological Characterization" Hardware 2, no. 2: 66-84. https://doi.org/10.3390/hardware2020004
APA StyleLemesle, J., & Bigerelle, M. (2024). A New RTI Portable Instrument for Surface Morphological Characterization. Hardware, 2(2), 66-84. https://doi.org/10.3390/hardware2020004