Recognition of Stator Winding Inter-Turn Fault in Interior-Mount LSPMSM Using Acoustic Signals




Abstract
:1. Introduction
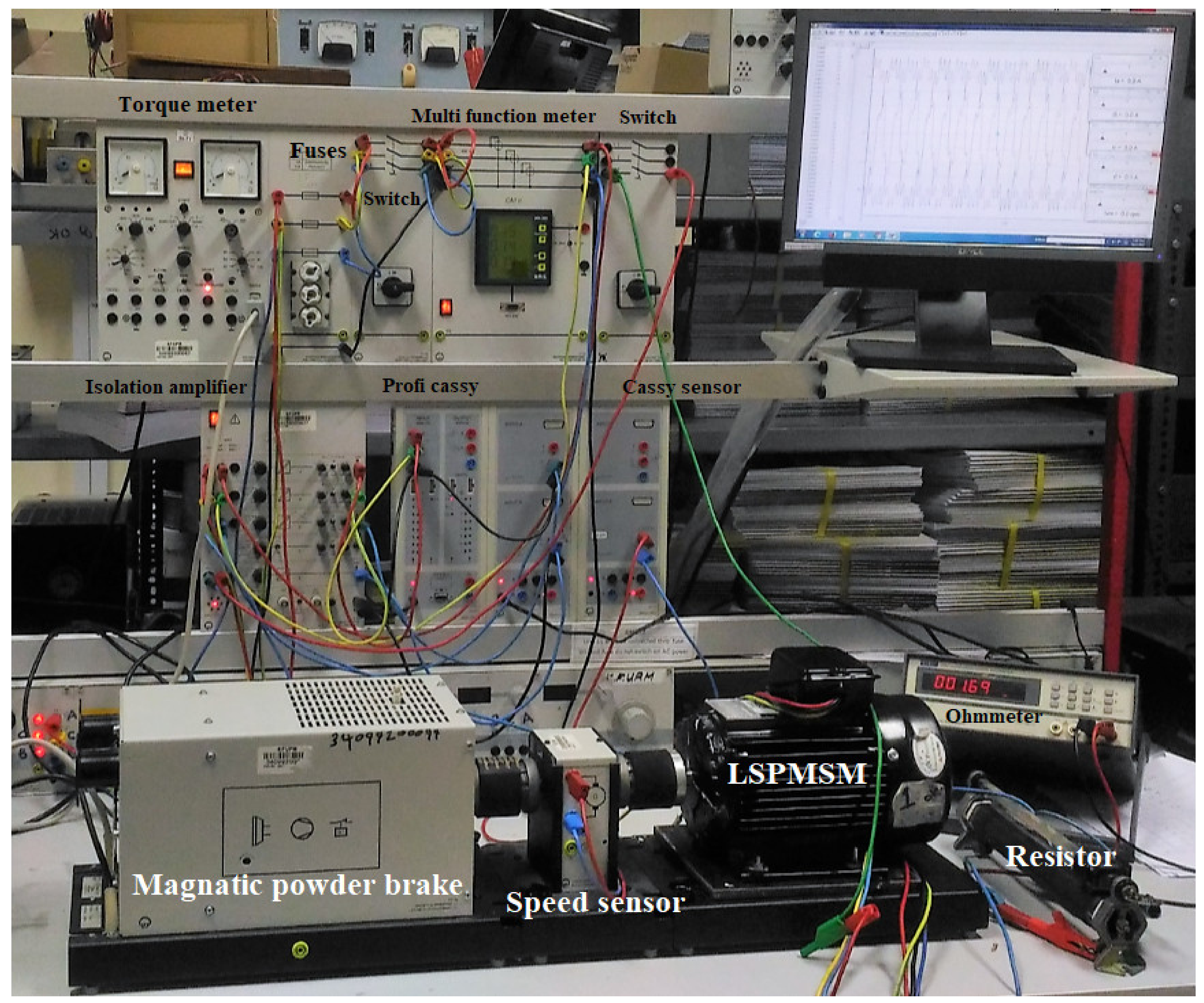
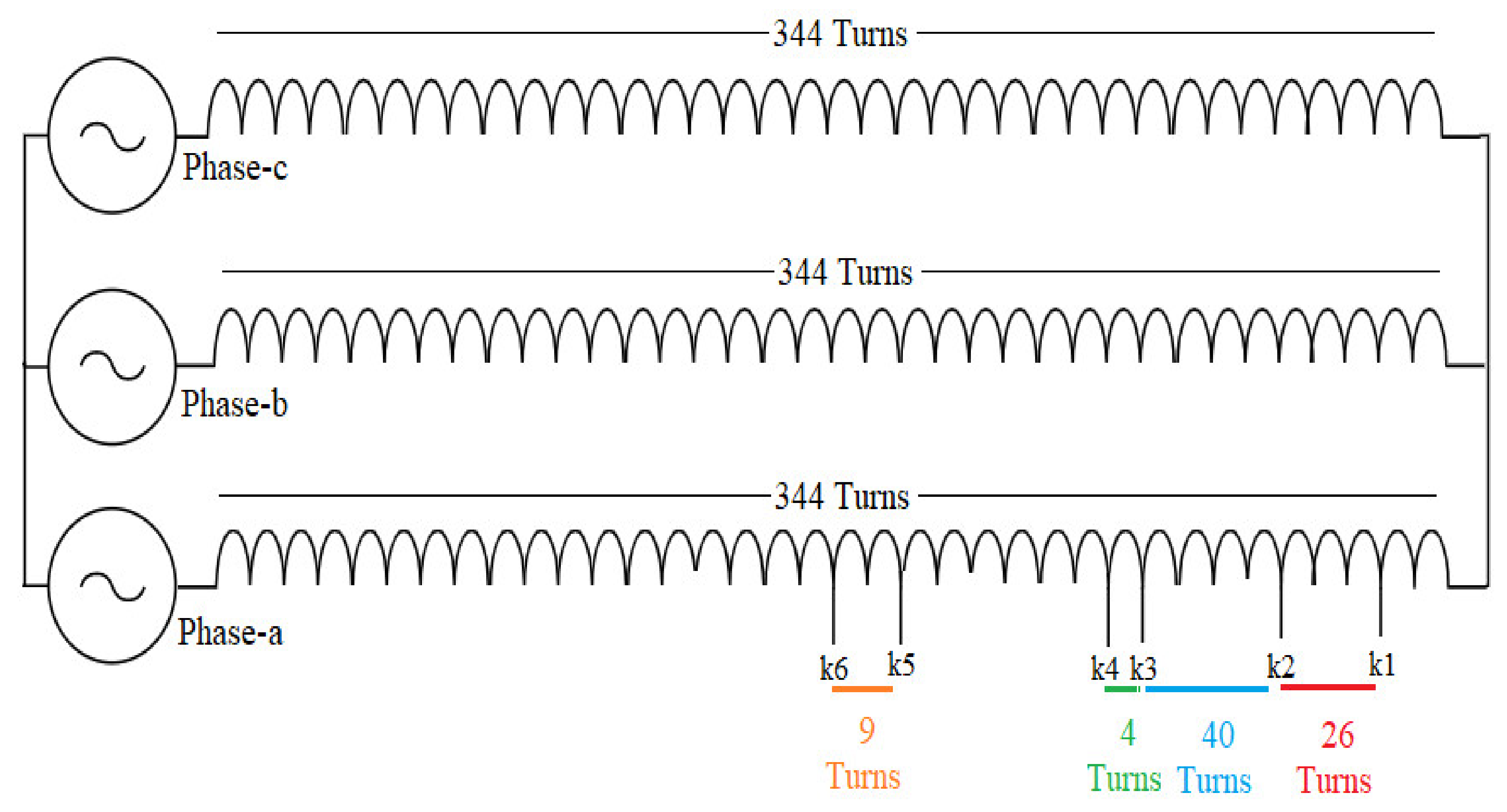
2. Experimental Setup and Data Collection
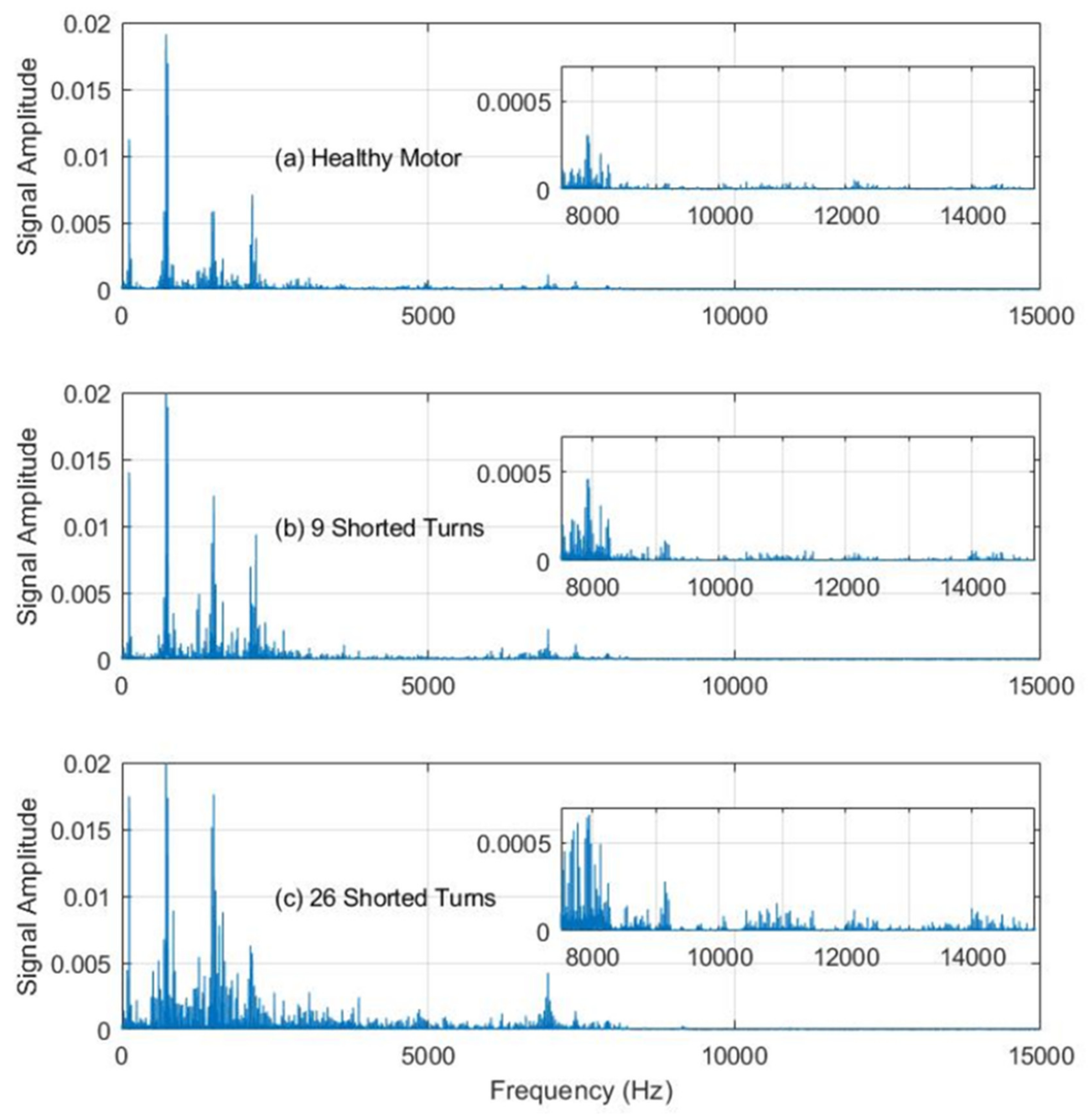
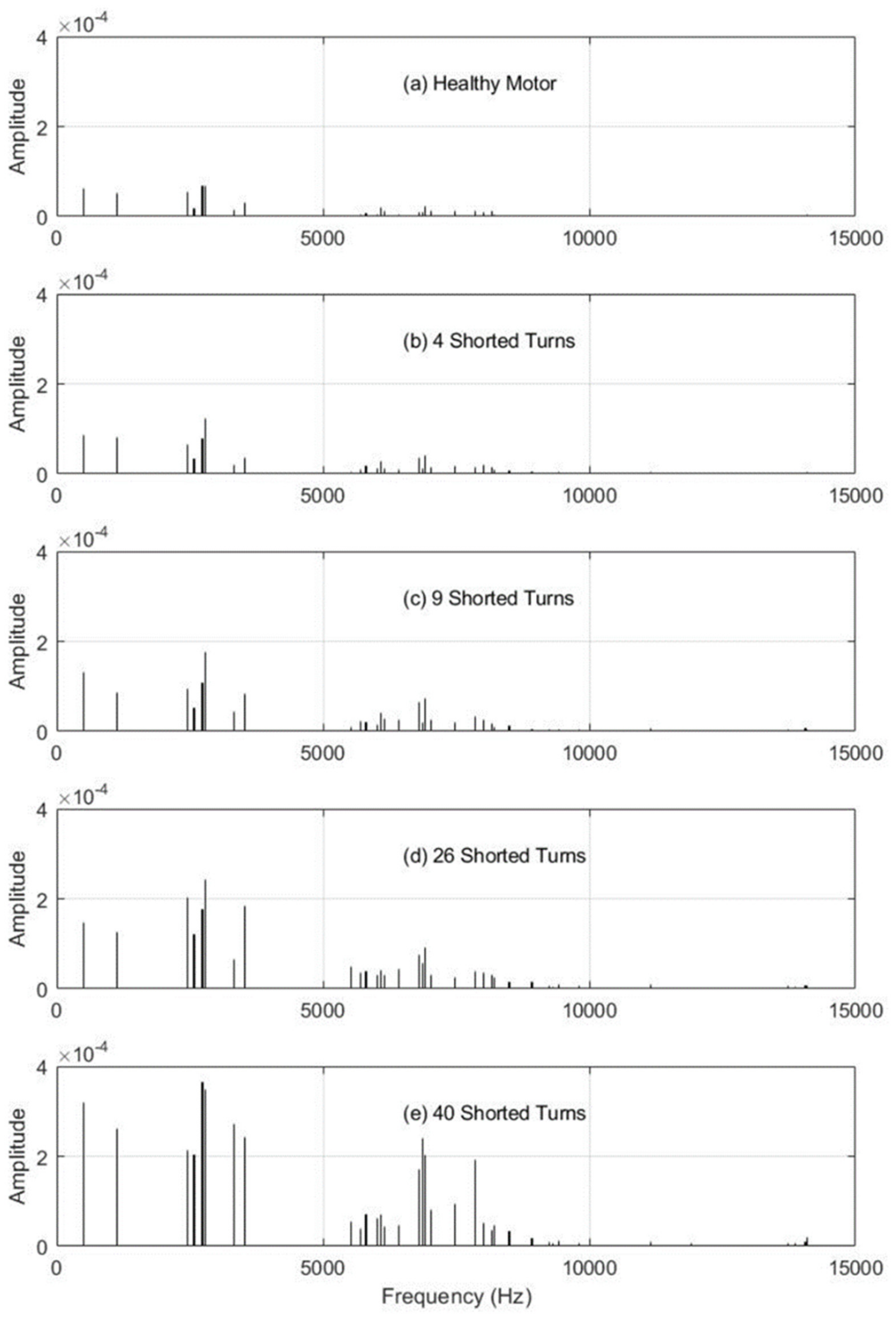
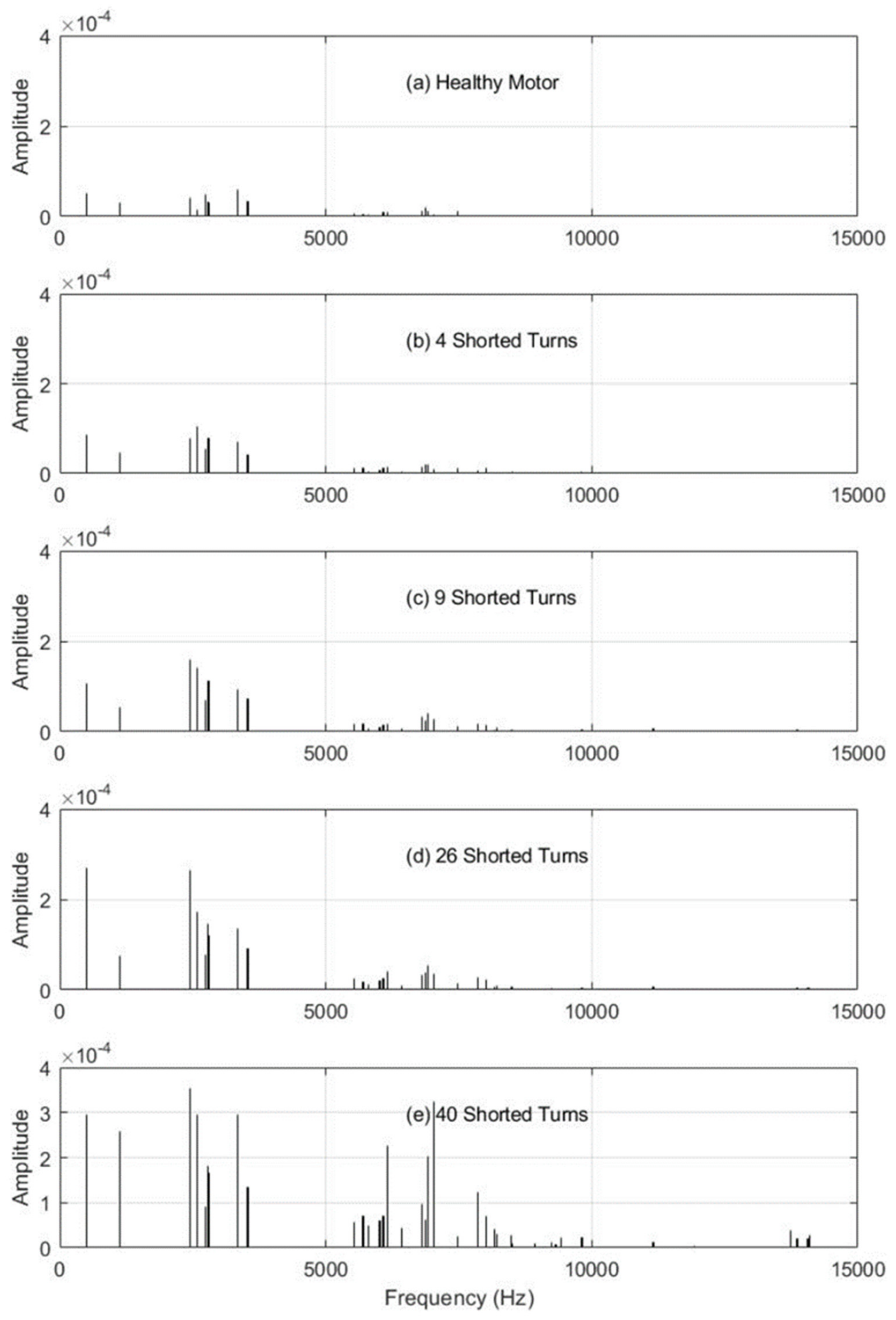
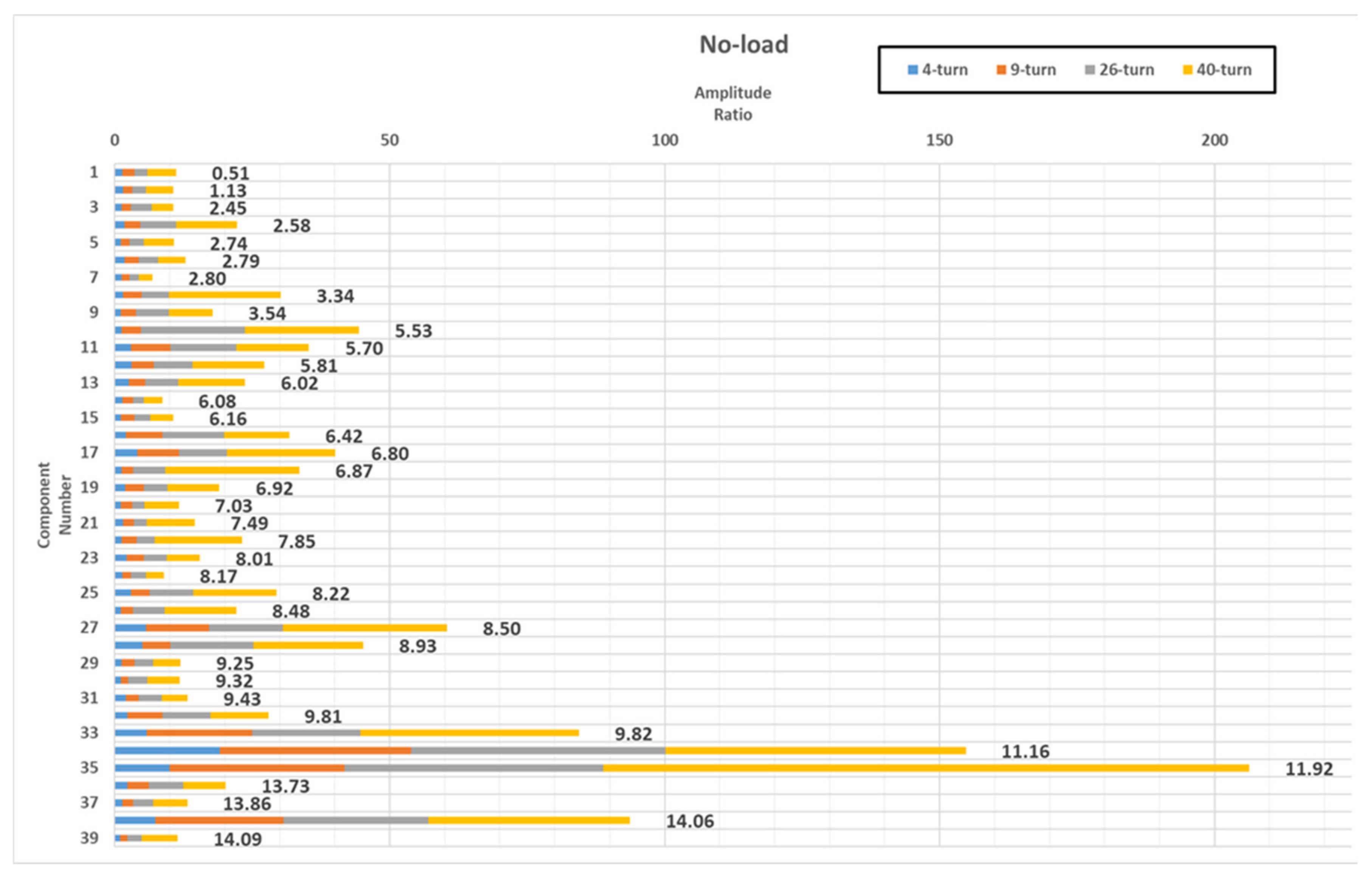
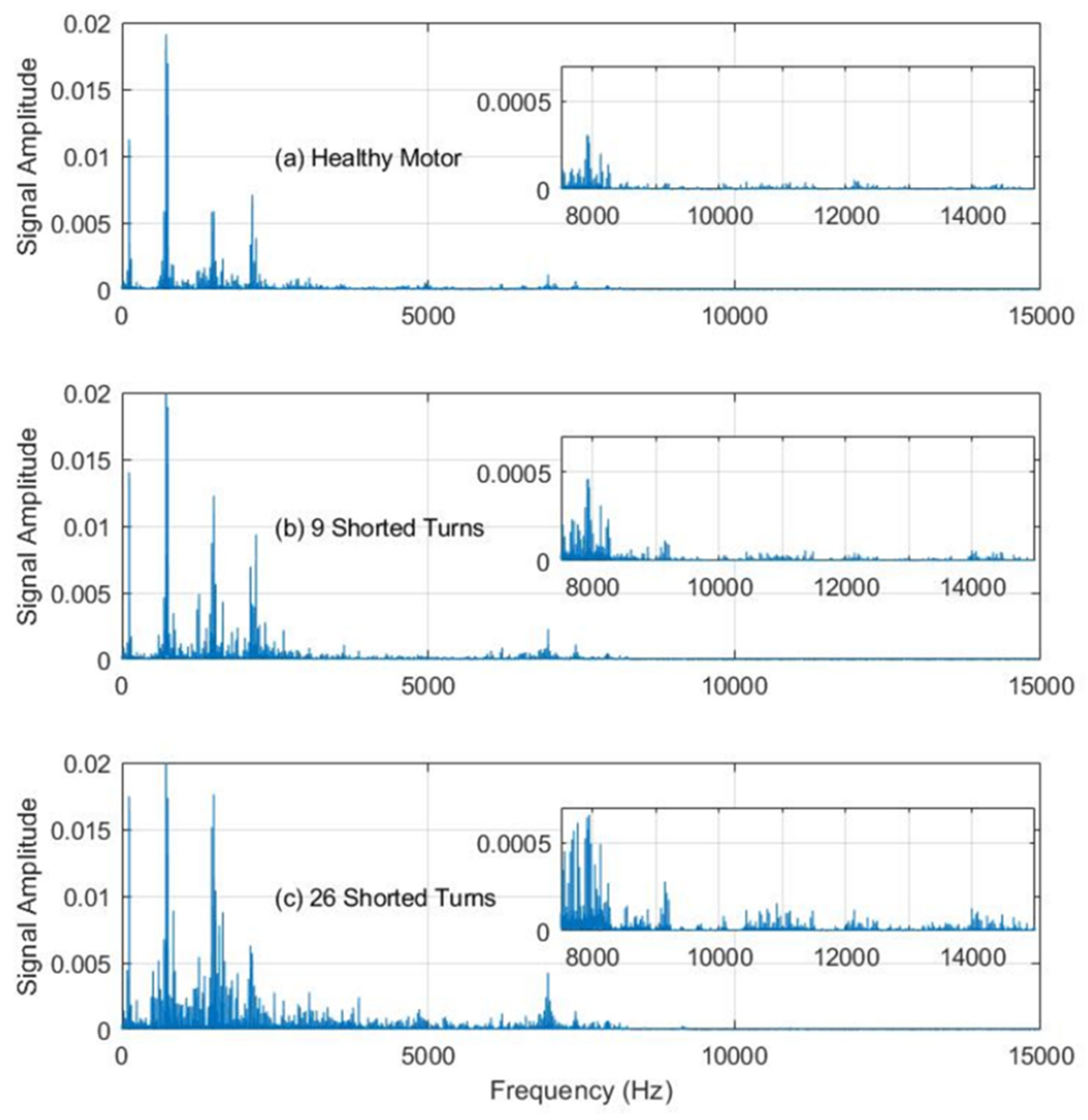
3. Results and Discussions
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Maraaba, L.; Al-Hamouz, Z.; Abido, M. An efficient stator inter-turn fault diagnosis tool for induction motors. Energies 2018, 11, 653. [Google Scholar] [CrossRef] [Green Version]
- Maraaba, L.; Al-Hamouz, Z.; Milhem, A.; Abido, M. Modelling of interior-mount LSPMSM under asymmetrical stator winding. IET Electr. Power Appl. 2018, 12, 693–700. [Google Scholar] [CrossRef]
- Siddiqui, K.M.; Sahay, K.; Giri, V. Health monitoring and fault diagnosis in induction motor—A review. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 6549–6565. [Google Scholar]
- Kong, T.; Kim, H.; Park, H.; Lee, S.; Park, J. Changes in insulation characteristics of high-voltage motor stator windings with temperature and moisture. Am. J. Electr. Power Energy Syst. 2018, 7, 62–67. [Google Scholar] [CrossRef] [Green Version]
- Glowacz, A. Diagnostics of DC and induction motors based on the analysis of acoustic signals. Meas. Sci. Rev. 2014, 14, 257–262. [Google Scholar] [CrossRef] [Green Version]
- Glowacz, A. Acoustic-based fault diagnosis of commutator motor. Electronics 2018, 7, 299. [Google Scholar] [CrossRef] [Green Version]
- Zappalá, D.; Sarma, N.; Djurović, S.; Crabtree, C.; Mohammad, A.; Tavner, P. Electrical & mechanical diagnostic indicators of wind turbine induction generator rotor faults. Renew. Energy 2019, 131, 14–24. [Google Scholar]
- Al-Musawi, A.K.; Anayi, F.; Packianather, M. Three-phase induction motor fault detection based on thermal image segmentation. Infrared Phys. Technol. 2020, 104, 103140. [Google Scholar] [CrossRef]
- Gómez, M.J.; Castejón, C.; García-Prada, J.C. Review of recent advances in the application of the wavelet transform to diagnose cracked rotors. Algorithms 2016, 9, 19. [Google Scholar] [CrossRef]
- Wang, T.; Han, Q.; Chu, F.; Feng, Z. Vibration based condition monitoring and fault diagnosis of wind turbine planetary gearbox: A review. Mech. Syst. Signal Process. 2019, 126, 662–685. [Google Scholar] [CrossRef]
- Caso, E.; Fernandez-del-Rincon, A.; Garcia, P.; Iglesias, M.; Viadero, F. Monitoring of misalignment in low speed geared shafts with acoustic emission sensors. Appl. Acoust. 2020, 159, 107092. [Google Scholar] [CrossRef]
- Akar, M.; TAŞKIN, S.; ŞEKER, Ş.S.; Cankaya, I. Detection of static eccentricity for permanent magnet synchronous motors using the coherence analysis. Turk. J. Electr. Eng. Comput. Sci. 2010, 18, 963–975. [Google Scholar] [CrossRef]
- Karami, M.; Mariun, N.; Mehrjou, M.R.; Ab Kadir, M.Z.A.; Misron, N.; Mohd Radzi, M.A. Static eccentricity fault recognition in three-phase line start permanent magnet synchronous motor using finite element method. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef] [Green Version]
- Dogan, Z.; KARA, B.; EMEKSIZ, C.; GOKREM, L. The static eccentricity fault diagnosis in time domain at line start permanent magnet synchronous motor. J. New Results Sci. 2016, 5, 88–95. [Google Scholar]
- Sedky, M. Diagnosis of static, dynamic and mixed eccentricity in line start permanent magnet synchronous motor by using FEM. Int. J. Electr. Robot. Electron. Commun. Eng. 2014, 8, 29–34. [Google Scholar] [CrossRef]
- Maraaba, L.S.; Al-Hamouz, Z.M.; Abido, M.A. An accurate tool for detecting stator inter-turn fault in LSPMSM. IEEE Access 2019, 7, 88622–88634. [Google Scholar] [CrossRef]
- Maraaba, L.S.; Al-Hamouz, Z.M.; Milhem, A.S.; Abido, M.A. Neural network-based diagnostic tool for detecting stator inter-turn faults in line start permanent magnet synchronous motors. IEEE Access 2019, 7, 89014–89025. [Google Scholar] [CrossRef]
- Maraaba, L.S.; Milhem, A.S.; Nemer, I.A.; Al-Duwaish, H.; Abido, M.A. Convolutional Neural Network-Based Inter-Turn Fault Diagnosis in LSPMSMs. IEEE Access 2020, 8, 81960–81970. [Google Scholar] [CrossRef]
- Bouzid, M.B.K.; Champenois, G.; Bellaaj, N.M.; Signac, L.; Jelassi, K. An effective neural approach for the automatic location of stator interturn faults in induction motor. IEEE Transact. Ind. Electron. 2008, 55, 4277–4289. [Google Scholar] [CrossRef]
- Mehrjou, M.R.; Mariun, N.; Karami, M.; Misron, N.; Radzi, M.A.M. Broken rotor bar detection in LS-PMSMs based on statistical features analysis of start-up current envelope. In Proceedings of the 2015 IEEE 3rd International Conference on Smart Instrumentation. Measurement and Applications (ICSIMA), Putrajaya Marriott, Malaysia, 24–25 November 2015; pp. 1–6. [Google Scholar]
- Quiroz, J.C.; Mariun, N.; Mehrjou, M.R.; Izadi, M.; Misron, N.; Radzi, M.A.M. Fault detection of broken rotor bar in LS-PMSM using random forests. Measurement 2018, 116, 273–280. [Google Scholar] [CrossRef]
- Glowacz, A. Diagnostics of synchronous motor based on analysis of acoustic signals with the use of line spectral frequencies and K-nearest neighbor classifier. Arch. Acoust. 2014, 39, 189–194. [Google Scholar] [CrossRef]
- Vaimann, T.; Sobra, J.; Belahcen, A.; Rassõlkin, A.; Rolak, M.; Kallaste, A. Induction machine fault detection using smartphone recorded audible noise. IET Sci. Meas. Technol. 2018, 12, 554–560. [Google Scholar] [CrossRef] [Green Version]
- Glowacz, A. Acoustic based fault diagnosis of three-phase induction motor. Appl. Acoust. 2018, 137, 82–89. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, Z. Diagnosis of stator faults of the single-phase induction motor using acoustic signals. Appl. Acoust. 2017, 117, 20–27. [Google Scholar] [CrossRef]
- Maraaba, L.S.; Al-Hamouz, Z.M.; Abido, M.A. Mathematical modeling, simulation and experimental testing of interior-mount LSPMSM under stator inter-turn fault. IEEE Transact. Energy Convers. 2018, 34, 1213–1222. [Google Scholar] [CrossRef]
- Shen, J.-X.; Li, P.; Jin, M.-J.; Yang, G. Investigation and countermeasures for demagnetization in line start permanent magnet synchronous motors. IEEE Transact. Magn. 2013, 49, 4068–4071. [Google Scholar] [CrossRef]
- Lei, C.; Changjiang, W.; Xiaohua, B. Influence of load characteristics on the demagnetization of LSPMSM with non-uniform air gap structure. J. Electr. Eng. 2018, 1, 1. [Google Scholar]
- Weifu, L.; Haisen, Z.; Jian, Z.; Yingli, L.; Mingji, L. Dynamic irreversible demagnetization behavior of line-start permanent magnet synchronous motors in the starting process. Electr. Power Compon. Syst. 2015, 43, 1621–1629. [Google Scholar] [CrossRef]
- Mehrjou, M.R.; Mariun, N.; Karami, M.; Noor, S.B.M.; Zolfaghari, S.; Misron, N.; Kadir, M.Z.A.A.; Radzi, M.A.M.; Marhaban, M.H. Wavelet-based analysis of MCSA for fault detection in electrical machine. In Wavelet Transform and Some of Its Real-World Applications; IntechOpen: London, UK, 2015; p. 79. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Number of poles | 4 |
| Number of turns per stator phase | 86 × 4 |
| Number of bars | 20 |
| Permanent magnet flux density | 1.25 T |
| Machine rated power | 1 hp |
| Rated voltage | 400 Vrms |
| Rated frequency | 60 Hz |
| Rated speed | 1800 rpm |
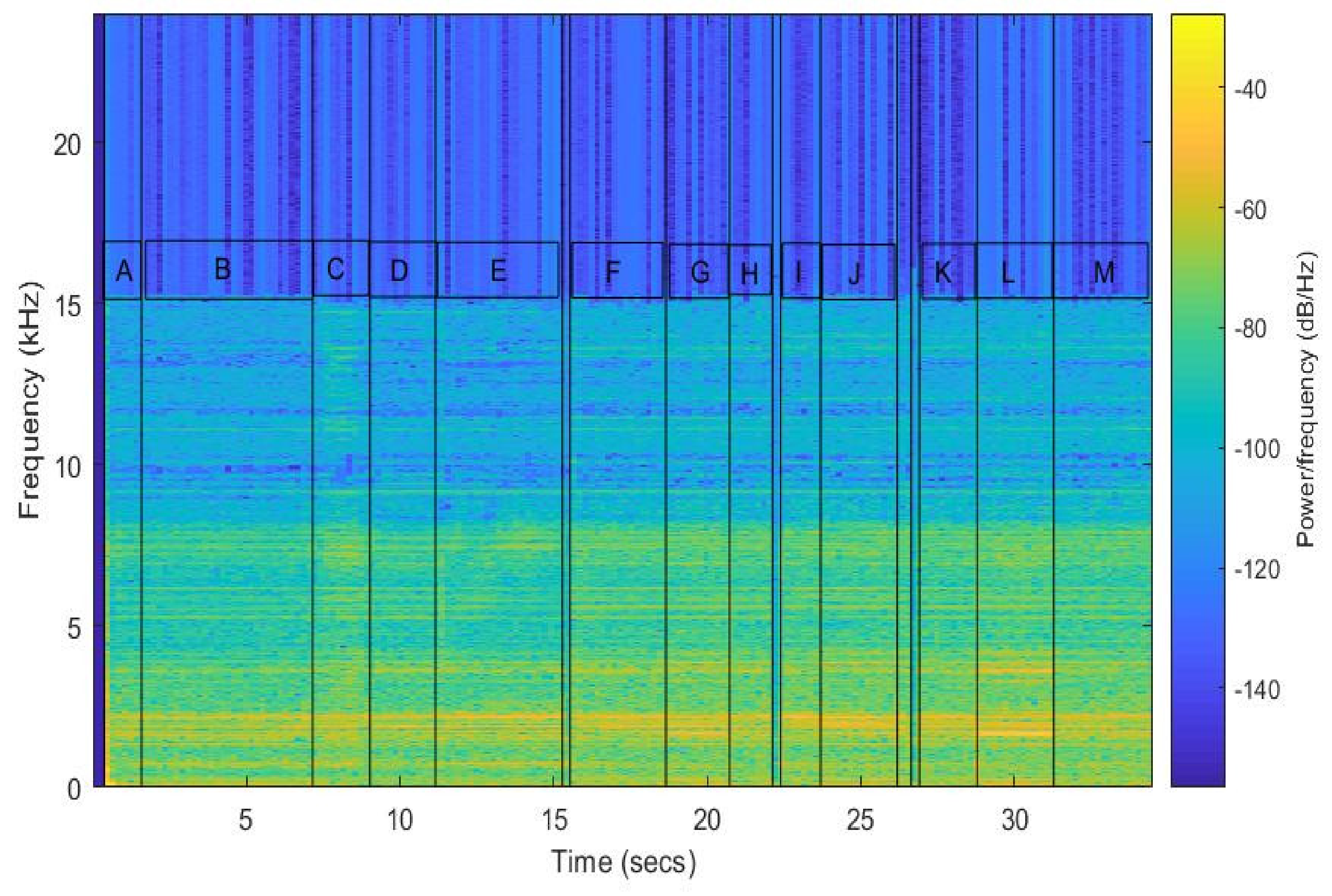
| Period | Description |
|---|---|
| A | Sound generated at starting in healthy condition |
| B, D, F, H, I, K, and M | Steady-state sound in healthy state with different background noise |
| C and E | 9 shorted turns |
| G and J | 26 shorted turns |
| L | 40 shorted turns |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maraaba, L.S.; Twaha, S.; Memon, A.; Al-Hamouz, Z. Recognition of Stator Winding Inter-Turn Fault in Interior-Mount LSPMSM Using Acoustic Signals. Symmetry 2020, 12, 1370. https://doi.org/10.3390/sym12081370
Maraaba LS, Twaha S, Memon A, Al-Hamouz Z. Recognition of Stator Winding Inter-Turn Fault in Interior-Mount LSPMSM Using Acoustic Signals. Symmetry. 2020; 12(8):1370. https://doi.org/10.3390/sym12081370
Chicago/Turabian StyleMaraaba, Luqman S., Ssennoga Twaha, Azhar Memon, and Zakariya Al-Hamouz. 2020. "Recognition of Stator Winding Inter-Turn Fault in Interior-Mount LSPMSM Using Acoustic Signals" Symmetry 12, no. 8: 1370. https://doi.org/10.3390/sym12081370
APA StyleMaraaba, L. S., Twaha, S., Memon, A., & Al-Hamouz, Z. (2020). Recognition of Stator Winding Inter-Turn Fault in Interior-Mount LSPMSM Using Acoustic Signals. Symmetry, 12(8), 1370. https://doi.org/10.3390/sym12081370