
Average Degree of Coverage and Coverage Unevenness Coefficient as Parameters for Spraying Quality Assessment


Abstract
:1. Introduction
2. Materials and Methods
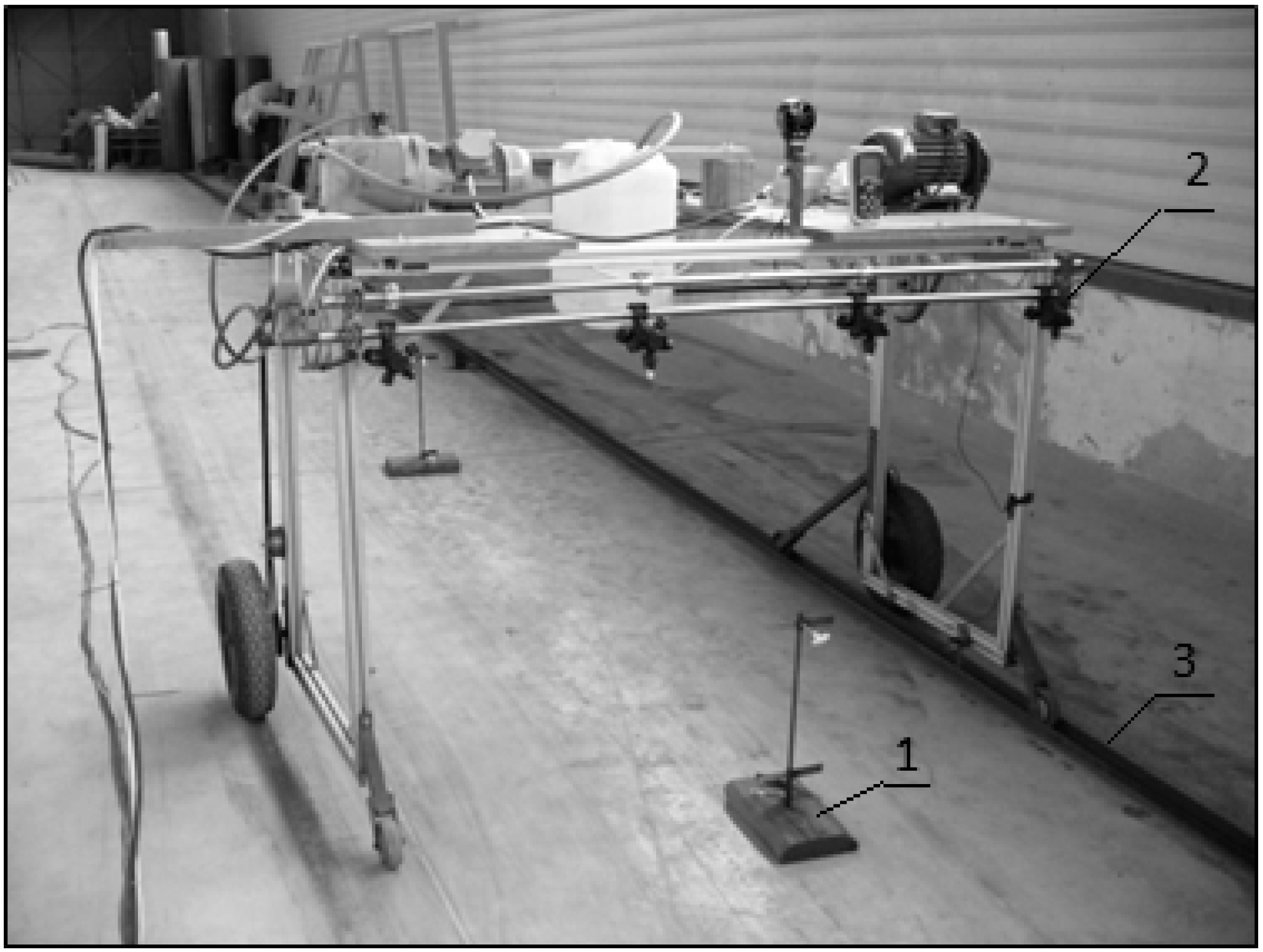
2.1. Experimental Set-Up
- Pressure: 200, 300, and 400 kPa,
- Height of boom: 0.5 m,
- Spray angle, perpendicular to the ground: angled forward +20°, +10°, and 0° and backward −10°, and −20°
- Driving speed: 1.1, 2.2, and 3.3 m·s−1,
- Dose of liquid: 200 L·ha−1 (200 kPa), 240 L·ha−1 (300 kPa), 275 L·ha−1 (400 kPa))
2.2. Neural Network Models
2.3. Optimization
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bourodimos, G.; Koutsiaras, M.; Psiroukis, V.; Balafoutis, A.; Fountas, S. Development and Field Evaluation of a Spray Drift Risk Assessment Tool for Vineyard Spraying Application. Agriculture 2019, 9, 181. [Google Scholar] [CrossRef] [Green Version]
- Ki-Hyun, K.; Ehsanul, K.; Shamin, J. Exposure to pesticides and the associated human health effects. Sci. Total Environ. 2016, 575, 252–535. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lombardi, M.; Puri, D.; Casorri, L.; Masciarelli, E.; Mandić-Rajčević, S.; Colosio, C. The Safe Use of Pesticides: A Risk Assessment Procedure for the Enhancement of Occupational Health and Safety (OHS) Management. Int. J. Environ. Res. Public Health 2019, 16, 310. [Google Scholar] [CrossRef] [Green Version]
- Wilmart, O.; Legrève, A.; Scippo, M.L.; Reybroeck, W.; Urbain, B.; de Graaf, D.C.; Steurbaut, W.; Delahaut, P.; Gustin, P.; Kim Nguyen, B.; et al. Residues in Beeswax: A Health Risk for the Consumer of Honey and Beeswax? J. Agric. Food Chem. 2016, 64, 8425–8434. [Google Scholar] [CrossRef] [PubMed]
- Machado, B.B.; Spadon, G.; Arruda, M.S.; Goncalves, W.N.; Carvalho, A.C.P.L.F.; Rodrigues, J.F., Jr. A smartphone application to measure the quality of pest control spraying machines via image analysis. Assoc. Comput. Mach. 2018, 956–963. [Google Scholar] [CrossRef] [Green Version]
- Nansen, C.; Ferguson, J.C.; Moore, J.; Groves, L.; Emery, R.; Garel, N.; Hewitt, A. Optimizing Pesticide Spray Coverage Using a Novel Web and smartphone Tool, SnapCard. Agron. Sustain. Dev. 2015, 35, 1075–1085. [Google Scholar] [CrossRef]
- Li, W.; Xu, B.; Du, Y.; Mao, E.; Zhu, Z.; Li, Z. Auxiliary navigation system based on Baidu Map JavaScript API for high clearance sprayers. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems and Artificial Intelligence (ICUSAI), Xi’an, China, 22–24 November 2019; pp. 160–165. [Google Scholar] [CrossRef]
- Szwedziak, K.; Niedbała, G.; Grzywacz, Ż.; Winiarski, P.; Doležal, P. The Use of Air Induction Nozzles for Application of Fertilizing Preparations Containing Beneficial Microorganisms. Agriculture 2020, 10, 303. [Google Scholar] [CrossRef]
- Berger, C.; Laurent, F. Trunk injection of plant protection products to protect trees from pests and diseases. Crop Prot. 2019, 124, 104831. [Google Scholar] [CrossRef]
- Samseemoung, G.; Soni, P.; Suwan, P. Development of a Variable Rate Chemical Sprayer for Monitoring Diseases and Pests Infestation in Coconut Plantations. Agriculture 2017, 7, 89. [Google Scholar] [CrossRef] [Green Version]
- Warneke, B.; Zhu, H.; Pscheidt, J.; Nackley, L. Canopy spray application technology in specialty crops: A slowly evolving landscape. Pest. Manag. Sci. 2020. [Google Scholar] [CrossRef] [PubMed]
- Otto, S.; Loddo, D.; Baldoin, C.; Zanin, G. Spray drift reduction techniques for vineyards in fragmented landscapes. J. Environ. Manag. 2015, 162, 290–298. [Google Scholar] [CrossRef]
- Butler Ellis, M.C.; van de Zande, J.C.; van den Berg, F.; Kennedy, M.C.; O’Sullivan, C.M.; Jacobs, C.M.; Fragkoulis, G.; Spanoghe, P.; Gerritsen-Ebben, R.; Frewer, L.J.; et al. The BROWSE model for predicting exposures of residents and bystanders to agricultural use of plant protection products: An overview. Biosyst. Eng. 2017, 154, 92–104. [Google Scholar] [CrossRef] [Green Version]
- Butler Ellis, M.C.; van den Berg, F.; van de Zande, J.C.; Kennedy, M.C.; Charistou, A.N.; Arapaki, N.S.; Butler, A.H.; Machera, K.A.; Jacobs, C.M. The BROWSE model for predicting exposures of residents and bystanders to agricultural use of pesticides: Comparison with experimental data and other exposure models. Biosyst. Eng. 2017, 154, 122–136. [Google Scholar] [CrossRef]
- Kennedy, M.C.; Butler Ellis, M.C. Probabilistic modelling for Bystander and Resident exposure to pesticides using the Browse software. Biosyst. Eng. 2017, 154, 105–121. [Google Scholar] [CrossRef]
- Tsaboula, A.; Papadakis, E.-N.; Vryzas, Z.; Kotopoulou, A.; Kintzikoglou, K.; Papadopoulou-Mourkidou, E. Environmental and human risk hierarchy of pesticides: A prioritization method, based on monitoring, hazard assessment and environmental fate. Environ. Int. 2016, 91, 78–93. [Google Scholar] [CrossRef] [PubMed]
- Baldoin, C.; Friso, D. Assessment of the contribute of spray thickeners to the agro-chemical drift reduction using a mathematical model and a wind tunnel. Appl. Math. Sci. 2015, 9, 5603–5614. [Google Scholar] [CrossRef]
- Friso, D.; Baldoin, C. Mathematical modeling and experimental assessment of agrochemical drift using a wind tunnel. Appl. Math. Sci. 2015, 9, 5451–5463. [Google Scholar] [CrossRef]
- Friso, D.; Baldoin, C.; Pezzi, F. Mathematical modeling of the dynamics of air jet crossing the canopy of tree crops during pesticide application. Appl. Math. Sci. 2015, 9, 1281–1296. [Google Scholar] [CrossRef]
- Griesang, F.; Decaro, R.; dos Santos, C.; Santos, E.; de Lima Roque, N.; da Costa Ferreira, M. How Much Do Adjuvant and Nozzles Models Reduce the Spraying Drift? Drift in Agricultural Spraying. Am. J. Plant. Sci. 2017, 8, 2785–2794. [Google Scholar] [CrossRef] [Green Version]
- Duga, A.T.; Delele, M.A.; Ruysen, K.; Dekeyser, D.; Nuyttens, D.; Bylemans, D.; Nicolai, B.M.; Verboven, P. Development and validation of a 3D CFD model of drift and its application to air-assisted orchard sprayers. Biosyst. Eng. 2017, 154, 62–75. [Google Scholar] [CrossRef]
- Salcedo, R.; Vallet, A.; Granell, R.; Garcera, C.; Molto, E.; Chueca, P. Eulerian-lagrangian model of the behaviour of droplets produced by an air-assisted sprayer in a citrus orchard. Biosyst. Eng. 2017, 154, 76–91. [Google Scholar] [CrossRef]
- Gregorio, E.; Rocadenbosch, F.; Sanz, R.; Rosell-Polo, J. Eye-safe lidar system for pesticide spray drift measurement. Sensors 2015, 15, 3650–3670. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gregorio, E.; Torrent, X.; Planas, S.; Rosell-Polo, J. Assessment of spray drift potential reduction for hollow-cone nozzles: Part 2. LiDAR technique. Sci. Total Environ. 2019, 687, 967–977. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, Q.; Yin, X.; Lan, Y.; Zhang, J.; Ge, Y. Design of Plant Protection UAV Variable Spray System Based on Neural Networks. Sensors 2019, 19, 1112. [Google Scholar] [CrossRef] [Green Version]
- Azizpanah, A.; Rajabipour, A.; Alimardani, R.; Kheiralipour, K.; Mohammadi, V. Precision spray modeling using image processing and artificial neural network. Agric. Eng. Int. CIGR J. 2015, 17, 65–74. [Google Scholar]
- Yang, F.; Xue, X.; Cai, C.; Sun, Z.; Zhou, Q. Numerical Simulation and Analysis on Spray Drift Movement of Multirotor Plant Protection Unmanned Aerial Vehicle. Energies 2018, 11, 2399. [Google Scholar] [CrossRef] [Green Version]
- Zhai, Z.; Martínez Ortega, J.-F.; Lucas Martínez, N.; Rodríguez-Molina, J.A. Mission Planning Approach for Precision Farming Systems Based on Multi-Objective Optimization. Sensors 2018, 18, 1795. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Malneršič, A.; Dular, M.; Širok, B.; Oberti, R.; Hočevar, M. Close-range air-assisted precision spot-spraying for robotic applications: Aerodynamics and spray coverage analysis. Biosyst. Eng. 2016, 146, 216–226. [Google Scholar] [CrossRef]
- Marian, O.; Muntean, M.; Drocaş, I.; Ranta, O.; Molnar, A.; Catunescu, G.; Bărbieru, V. Assessment Method of Coverage Degree for Pneumatic Sprayers Used in Orchards. Agric. Agric. Sci. Procedia 2016, 10, 47–54. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Cui, H.; Ma, Y.; Xun, L.; Li, Z.; Yang, Z.; Lu, H. Orchard Spray Study: A prediction model of droplet deposition states on leaf surfaces. Agronomy 2020, 10, 747. [Google Scholar] [CrossRef]
- Liao, J.; Hewitt, A.J.; Wang, P.; Luo, X.W.; Zang, Y.; Zhou, Z.Y.; Lan, Y.; O’Donnell, C. Development of droplet characteristics prediction models for air induction nozzles based on wind tunnel tests. Int. J. Agric. Biol. Eng. 2019, 12, 1–6. [Google Scholar] [CrossRef]
- Musiu, E.; Lijun, Q.L.; Wu, Y. Spray deposition and distribution on the targets and losses to the ground as affected by application volume rate, airflow rate and target position. Crop. Prot. 2019, 116, 170–180. [Google Scholar] [CrossRef]
- Legleiter, T.R.; Johnson, W.G. Herbicide coverage in narrow row soybean as influenced by spray nozzle design and carrier volume. Crop. Prot. 2016, 83, 1–8. [Google Scholar] [CrossRef]
- Özlüoymak, Ö.B.; Bolat, A. Development and assessment of a novel imaging software for optimizing the spray parameters on water-sensitive papers. Comput. Electron. Agric. 2020, 168, 105104. [Google Scholar] [CrossRef]
- Lipiński, A.J.; Lipiński, S. Binarizing water sensitive papers—How to assess the coverage area properly? Crop. Prot. 2020, 127, 104949. [Google Scholar] [CrossRef]
- Dereń, K.; Cieniawska, B.; Szewczyk, A.; Sekutowski, T.; Zbytek, Z. Average liquid coverage depending on the type of the nozzle, spraying parameters and characteristics of the sprayed objects. J. Res. Appl. Agric. Eng. 2017, 62, 22–26. [Google Scholar]
- ISO 5682-3, Equipment for Crop Protection—Spraying Equipment—Part 3: Test Methods for Volume/Hectare Adjustment Systems of Agricultural Hydraulic Pressure Sprayers; ISO: Geneva, Switzerland, 1997.
- Barati, R. Application of excel solver for parameter estimation of the nonlinear Muskingum models. KSCE J. Civ. Eng. 2013, 17, 1139–1148. [Google Scholar] [CrossRef]
- Bhattacharjya, R.K. Solving groundwater flow inverse problem using spreadsheet solver. J. Hydrol. Eng. 2011, 16, 472–477. [Google Scholar] [CrossRef]
- Qin, W.C.; Xue, X.Y.; Cui, L.F.; Zhou, Q.; Xu, Z.F.; Chang, F.L. Optimization and test for spraying parameters of cotton defoliant sprayer. Int. J. Agric. Biol. Eng. 2016, 9, 63–72. [Google Scholar] [CrossRef]
- Dereń, K.; Szewczyk, A.; Sekutowski, T.R. The effect of the type of preparation with the content of nano-copper and copper on the coverage of winter rape plants. J. Agric. Eng. 2018, 63, 51–55. [Google Scholar]
- Drocas, I.; Marian, O.; Ranta, O.; Molnar, A.; Muntean, M.; Cătunescu, G. Study on determining the degree of coverage when performing phytosanitary treatments using water sensitive paper. Lucr. Ştiinţifice Agron. 2014, 57, 159–163. [Google Scholar]
- Bolat, A.; Özlüoymak, Ö. Evaluation of performances of different types of spray nozzles in site-specific pesticide spraying. Semin. Ciências Agrárias. 2020, 41, 1199–1212. [Google Scholar] [CrossRef]
- Cai, J.C.; Wang, X.; Gao, Y.Y.; Yang, S.; Zhao, C.J. Design and performance evaluation of a variable-rate orchard sprayer based on a laser-scanning sensor. Int. J. Agric. Biol. Eng. 2019, 12, 51–57. [Google Scholar] [CrossRef]
- Baetens, K.; Ho, Q.T.; Nuyttens, D.; De Schampheleire, M.; Melese Endalew, A.; Hertog, M.; Nicolaï, B.; Ramon, H.; Verboven, P. A validated 2-D diffusion- advection model for prediction of drift from ground boom sprayers. Atmos. Environ. 2009, 43, 1674–1682. [Google Scholar] [CrossRef]
- Baetens, K.; Nuyttens, D.; Verboven, P.; De Schampheleire, M.; Nicolaï, B.; Ramon, H. Predicting drift from field spraying by means of a 3D computational fluid dynamics model. Comput. Electron. Agric. 2007, 56, 161–173. [Google Scholar] [CrossRef]
- Lebeau, F.; Verstraete, A.; Stainier, C.; Destain, M.-F. RTDrift: A real time model for estimating spray drift from ground applications. Comput. Electron. Agric. 2011, 77, 161–174. [Google Scholar] [CrossRef]
- Cieniawska, B.; Pentoś, K.; Łuczycka, D. Neural modeling and optimization of the coverage of the sprayed surface. Bull. Pol. Acad. Sci. Tech. Sci. 2020, 68, 601–608. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Nozzle | Nozzle Manufacturer | Pressure (kPa) | Flow Rate (l·min−1) | Droplet Size—VMD (μm) |
|---|---|---|---|---|
| single standard flat-fan—AXI 11002 | Albuz | 200 | 0.65 | 212 |
| single standard flat-fan—AXI 11002 | Albuz | 300 | 0.79 | 193 |
| single standard flat-fan—AXI 11002 | Albuz | 400 | 0.91 | 182 |
| single air-induction flat-fan—AVI 11002 | Albuz | 200 | 0.65 | 554 |
| single air-induction flat-fan—AVI 11002 | Albuz | 300 | 0.79 | 440 |
| single air-induction flat-fan—AVI 11002 | Albuz | 400 | 0.91 | 382 |
| dual anti-drift flat-fan—DGTJ 60 11002 | TeeJet | 200 | 0.65 | 299 |
| dual anti-drift flat-fan—DGTJ 60 11002 | TeeJet | 300 | 0.79 | 264 |
| dual anti-drift flat-fan—DGTJ 60 11002 | TeeJet | 400 | 0.91 | 249 |
| dual air-induction flat-fan—AVI TWIN 11002 | Albuz | 200 | 0.65 | 543 |
| dual air-induction flat-fan—AVI TWIN 11002 | Albuz | 300 | 0.79 | 436 |
| dual air-induction flat-fan—AVI TWIN 11002 | Albuz | 400 | 0.91 | 384 |
| MLP Structure | Train | Test | Validation | |||
|---|---|---|---|---|---|---|
| R | RMSE | R | RMSE | R | RMSE | |
| Single nozzles, average degree of coverage as an output parameter | ||||||
| 3-15-1 | 0.961 | 0.0020 | 0.968 | 0.0022 | 0.968 | 0.0019 |
| Single nozzles, coverage uniformity coefficient as an output parameter | ||||||
| 3-36-1 | 0.968 | 0.0015 | 0.967 | 0.0019 | 0.933 | 0.0041 |
| Dual nozzles, average degree of coverage as an output parameter | ||||||
| 3-17-1 | 0.959 | 0.0024 | 0.970 | 0.0021 | 0.976 | 0.0022 |
| Dual nozzles, coverage uniformity coefficient as an output parameter | ||||||
| 3-11-1 | 0.979 | 0.0016 | 0.968 | 0.0027 | 0.992 | 0.0007 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cieniawska, B.; Pentos, K. Average Degree of Coverage and Coverage Unevenness Coefficient as Parameters for Spraying Quality Assessment. Agriculture 2021, 11, 151. https://doi.org/10.3390/agriculture11020151
Cieniawska B, Pentos K. Average Degree of Coverage and Coverage Unevenness Coefficient as Parameters for Spraying Quality Assessment. Agriculture. 2021; 11(2):151. https://doi.org/10.3390/agriculture11020151
Chicago/Turabian StyleCieniawska, Beata, and Katarzyna Pentos. 2021. "Average Degree of Coverage and Coverage Unevenness Coefficient as Parameters for Spraying Quality Assessment" Agriculture 11, no. 2: 151. https://doi.org/10.3390/agriculture11020151