- Article

Innovative Real-Time Palm Tree Detection, Geo-Localization and Counting from Unmanned Aerial Vehicle (UAV) Aerial Images Using Deep Learning
- Ali Mazinani,
- Mostafa Norouzi and
- Amin Kolahdooz
- + 3 authors
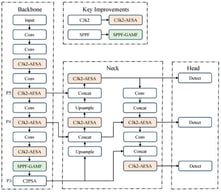
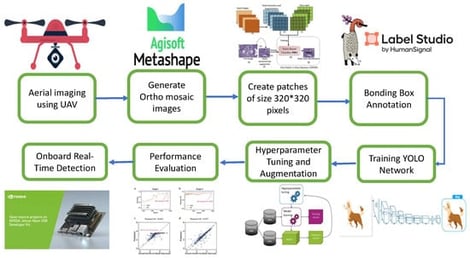
Accurate real-time detection, geolocation, and counting of palm trees are essential for plantation management, yield estimation, and resource allocation in precision agriculture. Traditional approaches such as manual surveys or offline image processing are labor-intensive and unsuitable for large-scale applications. This study introduces a fully onboard real-time framework that integrates Unmanned Aerial Vehivle (UAV) imagery, the YOLOv12 deep learning model, and a camera projection technique to detect, geolocate, and count palm trees directly during flight. The lightweight YOLOv12n variant, deployed on an NVIDIA Jetson Nano edge device, achieved a detection precision of 92.4%, an average geolocation error of 2.14 m, and a counting error of only 0.2% across 915 trees. Unlike many existing methods that rely on offline processing or offboard computation, the proposed system performs all computations in real time, enabling immediate decision-making for tasks such as plantation density analysis, replanting planning, and yield forecasting. Experimental results demonstrate that the proposed approach provides a scalable, cost-effective, and autonomous solution for modern precision agriculture.
16 March 2026
![TWSBR free-body diagram [23].](https://mdpi-res.com/cdn-cgi/image/w=281,h=192/https://mdpi-res.com/automation/automation-07-00049/article_deploy/html/images/automation-07-00049-g001-550.jpg)