


.png)


Sensors 2023, 23(16), 7079; https://doi.org/10.3390/s23167079 - 10 Aug 2023
Cited by 1 | Viewed by 1556
Abstract
►
Show Figures
The structural condition of hydroelectric tunnels is important to the overall performance, safety, and longevity of generating stations. Significant effort is required to inspect, monitor, and maintain these tunnels. Photogrammetry is an effective method of collecting highly accurate visual and spatial data. However,
[...] Read more.
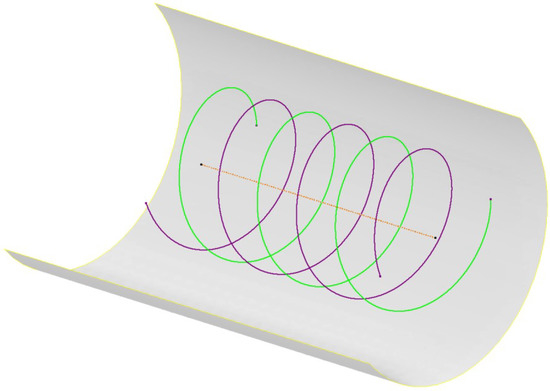
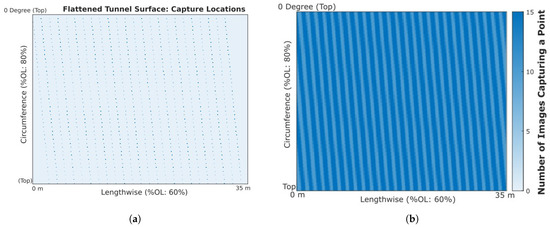
The structural condition of hydroelectric tunnels is important to the overall performance, safety, and longevity of generating stations. Significant effort is required to inspect, monitor, and maintain these tunnels. Photogrammetry is an effective method of collecting highly accurate visual and spatial data. However, it also presents the complex challenge of positioning a camera at thousands of difficult-to-reach locations throughout the large and varying-diameter tunnels. A semi-automated robotic camera positioning system was developed to enhance the collection of images within hydroelectric tunnels for photogrammetric inspections. A continuous spiral image network was developed to optimize the collection speed within the bounds of photography and capture-in-motion constraints. The positioning system and image network optimization reduce the time and effort required while providing the ability to adapt to different and varying tunnel diameters. To demonstrate, over 28,000 images were captured at a ground sampling distance of 0.4 mm in the 822 m long concrete-lined section of the Grand Falls Generating Station intake tunnel.
Full article
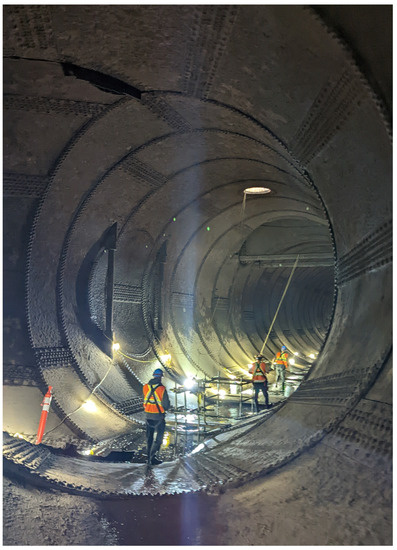
Figure 1

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}