A Systematic Comparison of Age and Gender Prediction on IMU Sensor-Based Gait Traces

 , , and
, , and
Abstract
:1. Introduction
2. Related Work
2.1. Gait Analysis
2.2. Age and Gender Analysis
2.3. Contribution beyond the State-of-the-Art
3. Gait Dataset and Features
3.1. The OU-ISIR Dataset Gait Action Dataset
3.2. Data Preprocessing
3.2.1. Raw Gait Sequence Data
3.2.2. Vertical and Horizontal Acceleration Components
3.2.3. Gait Dynamics Image
3.2.4. Angle Embedded Gait Dynamics Image
3.3. Automated Feature Extraction with Deep Learning
3.4. Experimental Protocol
4. Machine Learning Pipelines for Age and Gender Prediction
4.1. Automated Selection of Learning Algorithm and Hyperparameters
- Sensor position: all sensors vs. left sensor vs. right sensor vs. center sensor
- Activity: all activities vs. only walking activity.
- weka.classifiers.trees.RandomForest
- weka.classifiers.functions.SMOreg
- weka.classifiers.meta.RandomSubSpace
- weka.classifiers.lazy.Kstar
- weka.classifiers.trees.RandomForest
- weka.classifiers.functions.SMO
- weka.classifiers.meta.AttributeSelectedClassifier
- weka.classifiers.lazy.Ibk
- weka.classifiers.meta.RandomSubSpace
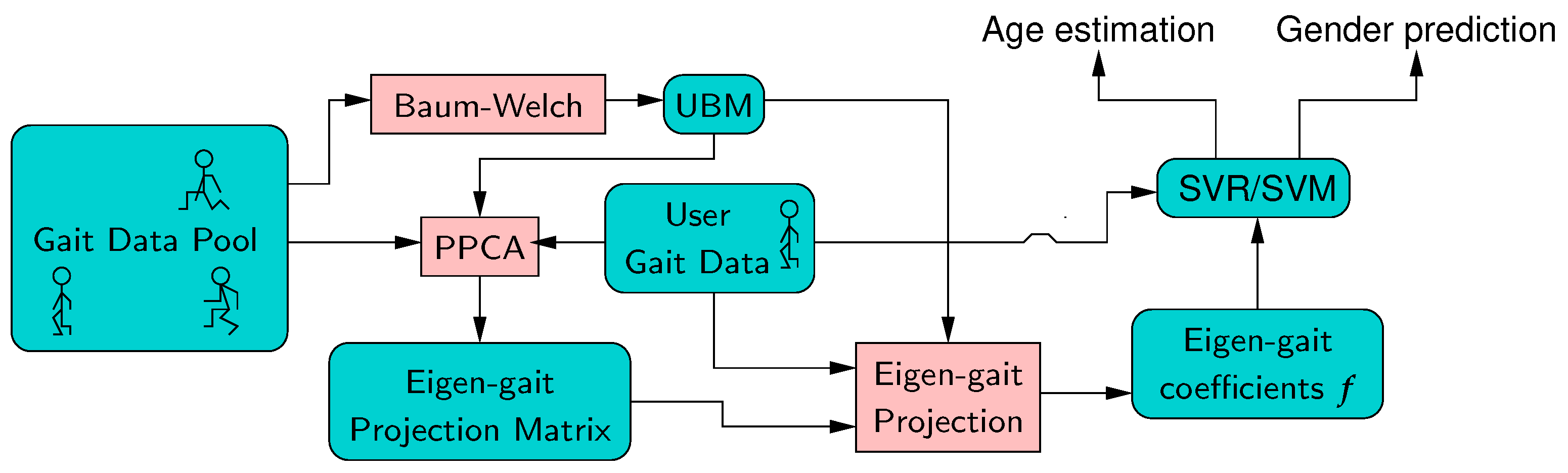
4.2. Hidden Markov Model and Universal Background Model
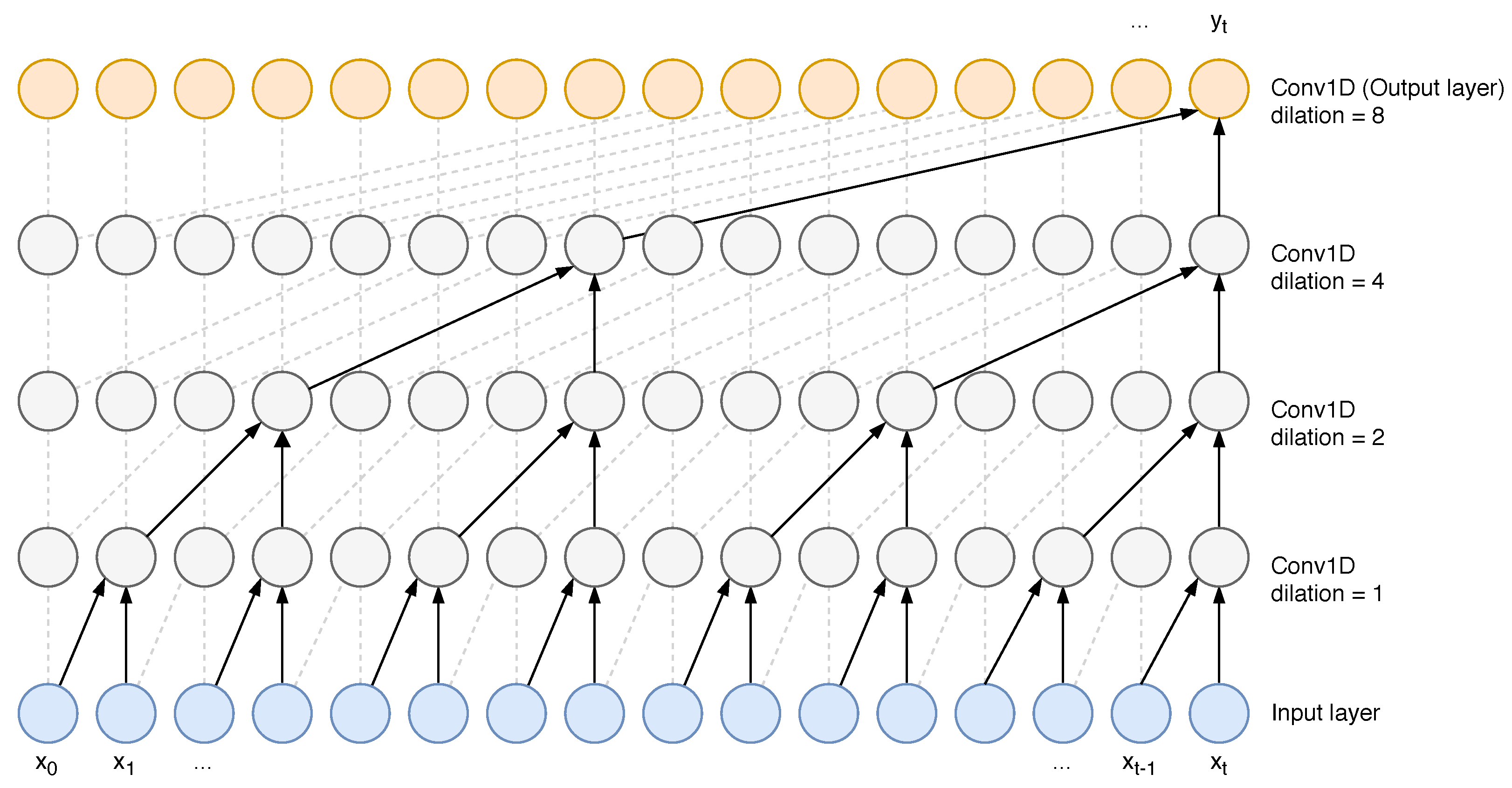
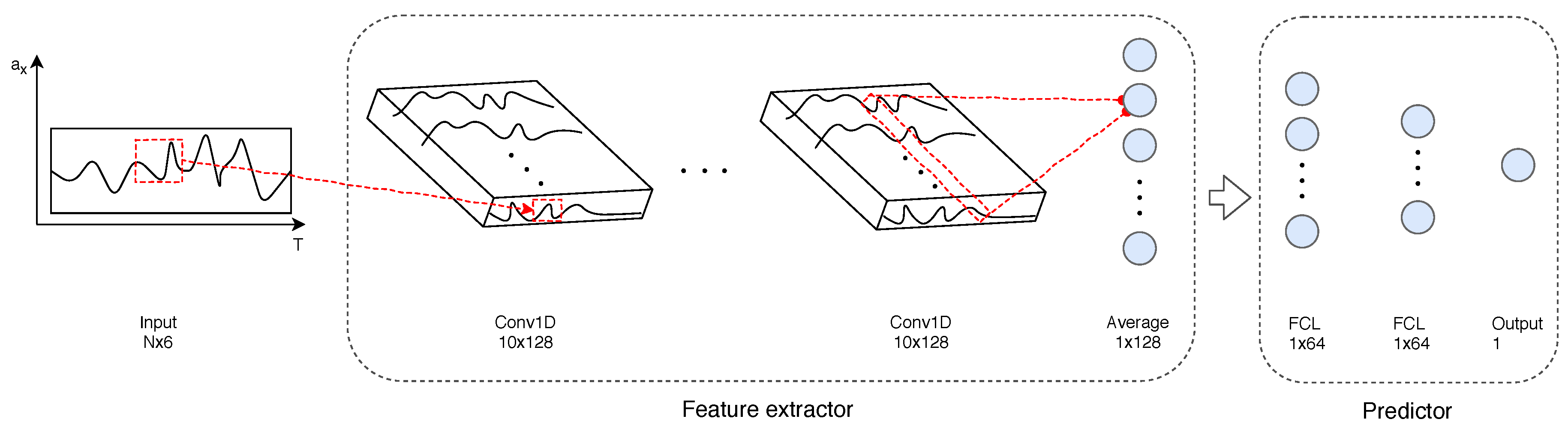
4.3. Deep Learning with Temporal Convolutional Networks and Dense Layers
4.4. Deep Learning with Orientation Independent Representation
4.5. Deep Learning with Orientation Invariant Representation of Gait Based on GDIs
5. Evaluation
5.1. Baseline Comparison on the Same Dataset
5.2. Discussion and Implications
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Filippeschi, A.; Schmitz, N.; Miezal, M.; Bleser, G.; Ruffaldi, E.; Stricker, D. Survey of motion tracking methods based on inertial sensors: A focus on upper limb human motion. Sensors 2017, 17, 1257. [Google Scholar] [CrossRef]
- Hölzemann, A.; Laerhoven, K.V. Using wrist-worn activity recognition for basketball game analysis. In Proceedings of the 5th international Workshop on Sensor-Based Activity Recognition and Interaction, iWOAR 2018, Berlin, Germany, 20–21 September 2018; pp. 13:1–13:6. [Google Scholar] [CrossRef]
- Chandel, V.; Sinharay, A.; Ahmed, N.; Ghose, A. Exploiting IMU sensors for IOT enabled health monitoring. In Proceedings of the First Workshop on IoT-enabled Healthcare and Wellness Technologies and Systems, Singapore, 30 June 2016; ACM: New York, NY, USA, 2016; pp. 21–22. [Google Scholar] [CrossRef]
- Khedr, M.; El-Sheimy, N. A smartphone step counter using IMU and magnetometer for navigation and health monitoring applications. Sensors 2017, 17, 2573. [Google Scholar] [CrossRef] [PubMed]
- Iakovakis, D.; Hadjidimitriou, S.; Charisis, V.; Bostantjopoulou, S.; Katsarou, Z.; Klingelhoefer, L.; Reichmann, H.; Dias, S.B.; Diniz, J.A.; Trivedi, D.; et al. Motor impairment estimates via touchscreen typing dynamics toward Parkinson’s disease detection From data harvested in-the-wild. Front. ICT 2018, 5, 28. [Google Scholar] [CrossRef]
- Cifuentes, C.A.; Frizera, A.; Carelli, R.; Bastos, T. Human-robot interaction based on wearable IMU sensor and laser range finder. Robot. Auton. Syst. 2014, 62, 1425–1439. [Google Scholar] [CrossRef]
- Lu, Y.J.; Chang, C.J.; Chang, C.W.; Yang, S.W. Accuracy comparisons in IMU sensor and motion analysis software. In Proceedings of the 2018 2nd International Conference on Mechatronics Systems and Control Engineering (ICMSCE 2018), Amsterdam, The Netherlands, 21–23 February 2018; ACM: New York, NY, USA, 2018; pp. 13–16. [Google Scholar] [CrossRef]
- Hacker, S.; Kalkbrenner, C.; Algorri, M.E.; Blechschmidt-Trapp, R. Gait analysis with IMU. In Proceedings of the International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2014), Angers, Loire Valley, France, 3–6 March 2014; SCITEPRESS—Science and Technology Publications, Lda: Setúbal, Portugal, 2014; Volume 1, pp. 127–133. [Google Scholar] [CrossRef]
- Wu, M.M.A.; Schneider, O.S.; Karuei, I.; Leong, L.; MacLean, K. Introducing GaitLib: A library for Real-Time Gait Analysis in Smartphones; Department of Computer Science, University of British Columbia: Vancouver, BC, Canada, 2014. [Google Scholar]
- Loose, H.; Orlowski, K.; Amann, R. Inertial measurement units in gait analysis applications. In Proceedings of the International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2015), Lisbon, Portugal, 12–15 January 2015; SCITEPRESS—Science and Technology Publications, Lda: Setúbal, Portugal, 2015; Volume 4, pp. 300–305. [Google Scholar] [CrossRef]
- Wan, C.; Wang, L.; Phoha, V.V. A survey on gait recognition. ACM Comput. Surv. 2018, 51. [Google Scholar] [CrossRef]
- Caramia, C.; Torricelli, D.; Schmid, M.; Muñoz-Gonzalez, A.; Gonzalez-Vargas, J.; Grandas, F.; Pons, J.L. IMU-based classification of Parkinson’s disease from gait: A sensitivity analysis on sensor location and feature selection. IEEE J. Biomed. Health Inf. 2018, 22, 1765–1774. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, H.; Lebel, K.; Bogard, S.; Goubault, E.; Boissy, P.; Duval, C. Using inertial sensors to automatically detect and segment activities of daily living in people with Parkinson’s disease. IEEE Trans. Neural Syst. Rehab. Eng. 2018, 26, 197–204. [Google Scholar] [CrossRef]
- Cola, G.; Avvenuti, M.; Musso, F.; Vecchio, A. Gait-based authentication using a wrist-worn device. In Proceedings of the 13th International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services (MOBIQUITOUS 2016), Hiroshima, Japan, 28 November–1 December 2016; ACM: New York, NY, USA, 2016; pp. 208–217. [Google Scholar] [CrossRef] [Green Version]
- Van hamme, T.; Preuveneers, D.; Joosen, W. Improving resilience of behaviometric based continuous authentication with multiple accelerometers. In Proceedings of the Data and Applications Security and Privacy XXXI—31st Annual IFIP WG 11.3 Conference, DBSec 2017, Philadelphia, PA, USA, 19–21 July 2017; Springer: Berlin, Germany, 2017; Volume 10359, pp. 473–485. [Google Scholar] [CrossRef]
- Xu, W.; Shen, Y.; Zhang, Y.; Bergmann, N.; Hu, W. Gait-watch: A context-aware authentication system for smart watch based on gait recognition. In Proceedings of the Second International Conference on Internet-of-Things Design and Implementation (IoTDI’17), Pittsburgh, PA, USA, 18–21 April 2017; ACM: New York, NY, USA, 2017; pp. 59–70. [Google Scholar] [CrossRef]
- Ngo, T.T.; Ahad, M.A.R.; Antar, A.D.; Ahmed, M.; Muramatsu, D.; Makihara, Y.; Yagi, Y.; Inoue, S.; Hossain, T.; Hattori, Y. OU-ISIR wearable sensor-based gait challenge: Age and gender. In Proceedings of the 12th IAPR International Conference on Biometrics, ICB 2019, Crete, Greece, 4–7 June 2019. [Google Scholar]
- Isaac, E.R.H.P.; Elias, S.; Rajagopalan, S.; Easwarakumar, K.S. Trait of gait: A survey on gait biometrics. arXiv 2019, arXiv:1903.10744. [Google Scholar]
- Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait analysis using wearable sensors. Sensors 2012, 12, 2255–2283. [Google Scholar] [CrossRef]
- Anwary, A.R.; Yu, H.; Vassallo, M. Optimal foot location for placing wearable IMU sensors and automatic feature extraction for gait analysis. IEEE Sens. J. 2018, 18, 2555–2567. [Google Scholar] [CrossRef]
- Qiu, S.; Wang, Z.; Zhao, H.; Hu, H. Using distributed wearable sensors to measure and evaluate human lower limb motions. IEEE Trans. Instrum. Meas. 2016, 65, 939–950. [Google Scholar] [CrossRef]
- Brzostowski, K. Toward the unaided estimation of human walking speed based on sparse modeling. IEEE Trans. Instrum. Meas. 2018, 67, 1389–1398. [Google Scholar] [CrossRef]
- Gabell, A.; Nayak, U. The effect of age on variability in gait. J. Gerontol. 1984, 39, 662–666. [Google Scholar] [CrossRef] [PubMed]
- Öberg, T.; Karsznia, A.; Öberg, K. Basic gait parameters: Reference data for normal subjects, 10–79 years of age. J. Rehab. Res. Dev. 1993, 30, 210. [Google Scholar]
- Steffen, T.M.; Hacker, T.A.; Mollinger, L. Age-and gender-related test performance in community-dwelling elderly people: Six-minute walk test, berg balance scale, timed up & go test, and gait speeds. Phys. Ther. 2002, 82, 128–137. [Google Scholar] [PubMed]
- Riaz, Q.; Vögele, A.; Krüger, B.; Weber, A. One small step for a man: Estimation of gender, age and height from recordings of one step by a single inertial sensor. Sensors 2015, 15, 31999–32019. [Google Scholar] [CrossRef] [PubMed]
- Lu, J.; Tan, Y.P. Gait-based human age estimation. IEEE Trans. Inf. Forensics Secur. 2010, 5, 761–770. [Google Scholar] [CrossRef]
- Lu, J.; Wang, G.; Moulin, P. Human identity and gender recognition from gait sequences with arbitrary walking directions. IEEE Trans. Inf. Forensics Secur. 2014, 9, 51–61. [Google Scholar] [CrossRef]
- Zhang, K.; Gao, C.; Guo, L.; Sun, M.; Yuan, X.; Han, T.X.; Zhao, Z.; Li, B. Age group and gender estimation in the wild with deep RoR architecture. IEEE Access 2017, 5, 22492–22503. [Google Scholar] [CrossRef]
- Zhang, K.; Liu, N.; Yuan, X.; Guo, X.; Gao, C.; Zhao, Z. Fine-grained age estimation in the wild with attention LSTM networks. arXiv 2018, arXiv:1805.10445. [Google Scholar]
- Zhang, K.; Liu, N.; Yuan, X.; Guo, X.; Gao, C.; Zhao, Z. Fine-grained age group classification in the wild. In Proceedings of the IEEE Computer Society 24th International Conference on Pattern Recognition, ICPR 2018, Beijing, China, 20–24 August 2018; pp. 788–793. [Google Scholar] [CrossRef]
- Riaz, Q.; Hashmi, M.Z.U.H.; Hashmi, M.A.; Shahzad, M.; Errami, H.; Weber, A. Move your body: Age estimation based on chest movement during normal walk. IEEE Access 2019, 7, 28510–28524. [Google Scholar] [CrossRef]
- Ngo, T.T.; Makihara, Y.; Nagahara, H.; Mukaigawa, Y.; Yagi, Y. Similar gait action recognition using an inertial sensor. Pattern Recognit. 2015, 48, 1289–1301. [Google Scholar] [CrossRef]
- Van hamme, T.; Preuveneers, D.; Joosen, W. Improving resilience of behaviometric based continuous authentication with multiple accelerometers. In Data and Applications Security and Privacy XXXI; Livraga, G., Zhu, S., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 473–485. [Google Scholar]
- Ngo, T.T.; Makihara, Y.; Nagahara, H.; Mukaigawa, Y.; Yagi, Y. The largest inertial sensor-based gait database and performance evaluation of gait-based personal authentication. Pattern Recognit. 2014, 47, 228–237. [Google Scholar] [CrossRef] [Green Version]
- Lu, H.; Huang, J.; Saha, T.; Nachman, L. Unobtrusive gait verification for mobile phones. In Proceedings of the 2014 ACM International Symposium on Wearable Computers, Seattle, WA, USA, 13–17 September 2014; ACM: New York, NY, USA, 2014; pp. 91–98. [Google Scholar] [CrossRef]
- Zhong, Y.; Deng, Y. Sensor orientation invariant mobile gait biometrics. In Proceedings of the IEEE International Joint Conference on Biometrics, Clearwater, FL, USA, 29 September–2 October 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhou, S. Wearable device-based gait recognition using angle embedded gait dynamic images and a convolutional neural network. Sensors 2017, 17, 478. [Google Scholar] [CrossRef] [PubMed]
- Bai, S.; Kolter, J.Z.; Koltun, V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling. arXiv 2018, arXiv:1803.01271. [Google Scholar]
- Van den Oord, A.; Dieleman, S.; Zen, H.; Simonyan, K.; Vinyals, O.; Graves, A.; Kalchbrenner, N.; Senior, A.W.; Kavukcuoglu, K. WaveNet: A generative model for raw audio. arXiv 2016, arXiv:1609.03499. [Google Scholar]
- Kotthoff, L.; Thornton, C.; Hoos, H.H.; Hutter, F.; Leyton-Brown, K. Auto-WEKA 2.0: Automatic model selection and hyperparameter optimization in WEKA. J. Mach. Learn. Res. 2017, 18, 826–830. [Google Scholar]
- Kenny, P.; Boulianne, G.; Dumouchel, P. Eigenvoice modeling with sparse training data. IEEE Trans. Speech Audio Process. 2005, 13, 345–354. [Google Scholar] [CrossRef]
- Rua, E.A.; Maiorana, E.; Castro, J.L.A.; Campisi, P. Biometric template protection using universal background models: An application to online signature. IEEE Trans. Inf. Forensics Secur. 2012, 7, 269–282. [Google Scholar] [CrossRef]
- Das, A.; Borisov, N.; Caesar, M. Tracking mobile web users through motion sensors: Attacks and defenses. In Proceedings of the 23rd Annual Network and Distributed System Security Symposium, NDSS 2016, San Diego, CA, USA, 21–24 February 2016. [Google Scholar]
- Weinsberg, U.; Bhagat, S.; Ioannidis, S.; Taft, N. BlurMe: Inferring and obfuscating user gender based on ratings. In Proceedings of the Sixth ACM Conference on Recommender Systems, Dublin, Ireland, 9–13 September 2012; ACM: New York, NY, USA, 2012; pp. 195–202. [Google Scholar] [CrossRef]
- European Parliament. Regulation (EU) 2016/679 of the European Parliament and of the Council of 27 April 2016 on the Protection of Natural Persons with Regard to the Processing of Personal Data and on the Free Movement of Such Data, and Repealing Directive 95/46/EC (General Data Protection Regulation). Off. J. Eur. Union 2016, 191, 1–88. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Team | Gender (% of Mistakes) | Age (Mean Absolute Error) |
|---|---|---|
| GAG2019112901 | 45.8763 | 20.0670 |
| GAG2019113001 | 38.6598 | 7.7824 |
| GAG2019120402 | 31.4433 | 6.9278 |
| GAG2019120601 | 47.9381 | 12.1340 |
| GAG2019120701 | 30.4124 | 6.4381 |
| GAG2019121201 | 30.9278 | 9.2107 |
| GAG2019121202 | 24.2268 | 5.3879 |
| GAG2019121501 | 24.7423 | 6.6175 |
| GAG2019122501 | 30.9278 | 7.0499 |
| GAG2019122601 | 50.0000 | 13.6237 |
| Method | Gender (% of Mistakes) | Age (Mean Absolute Error) |
|---|---|---|
| AutoWeka 2.0 | 41.7526 | 7.1959 |
| HMM | 58.2474 | 9.6186 |
| TCN | 39.6907 | 12.2990 |
| TCN + Orientation Independent (1) | 34.5361 | 8.1875 |
| TCN + Orientation Independent (2) | 32.9897 | 8.1942 |
| CNN + AE-GDI | 24.2268 | 5.3879 |
| Ensemble | 35.5670 | 5.9433 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van hamme, T.; Garofalo, G.; Argones Rúa, E.; Preuveneers, D.; Joosen, W. A Systematic Comparison of Age and Gender Prediction on IMU Sensor-Based Gait Traces. Sensors 2019, 19, 2945. https://doi.org/10.3390/s19132945
Van hamme T, Garofalo G, Argones Rúa E, Preuveneers D, Joosen W. A Systematic Comparison of Age and Gender Prediction on IMU Sensor-Based Gait Traces. Sensors. 2019; 19(13):2945. https://doi.org/10.3390/s19132945
Chicago/Turabian StyleVan hamme, Tim, Giuseppe Garofalo, Enrique Argones Rúa, Davy Preuveneers, and Wouter Joosen. 2019. "A Systematic Comparison of Age and Gender Prediction on IMU Sensor-Based Gait Traces" Sensors 19, no. 13: 2945. https://doi.org/10.3390/s19132945
APA StyleVan hamme, T., Garofalo, G., Argones Rúa, E., Preuveneers, D., & Joosen, W. (2019). A Systematic Comparison of Age and Gender Prediction on IMU Sensor-Based Gait Traces. Sensors, 19(13), 2945. https://doi.org/10.3390/s19132945